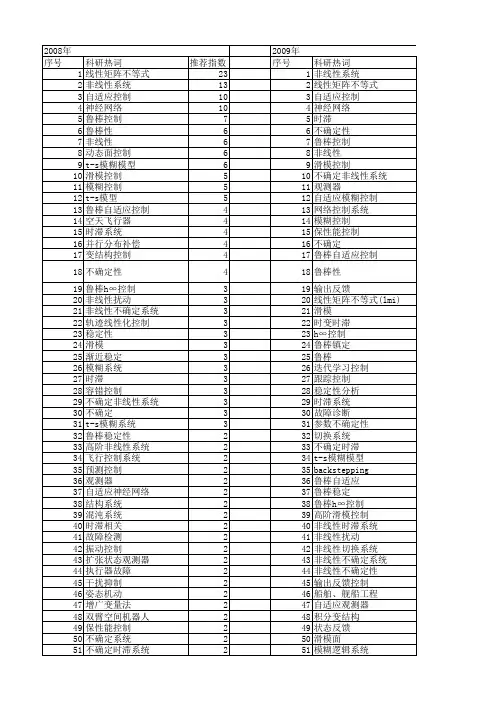
不确定系统的神经网络积分变结构控制
- 格式:pdf
- 大小:398.93 KB
- 文档页数:4
基于模糊RBF神经网络的PID控制方法及应用潘玉成;林鹤之;陈小利;吕仙银【摘要】针对常规PID控制参数固定难于满足时变不确定非线性系统的控制要求,利用模糊控制的良好收敛性和对模糊量的运算优势,以及神经网络自学习、自适应的特性,将常规PID控制与模糊控制、神经网络结合起来,提出一种基于模糊RBF神经网络的PID控制方法,实现了对PID参数的实时在线整定.将算法运用到柴油发电机调速系统的PID参数寻优中,MAT-LAB仿真试验结果表明,模糊RBF神经网络的PID控制具有更好的动静态特性和抗干扰性能,提高了对非线性时变被控对象的控制效果.【期刊名称】《机械制造与自动化》【年(卷),期】2019(048)003【总页数】5页(P215-219)【关键词】模糊RBF神经网络;PID控制;参数整定;MATLAB仿真【作者】潘玉成;林鹤之;陈小利;吕仙银【作者单位】宁德职业技术学院机电工程系,福建福安355000;福建省闽东卫生学校,福建福安355017;宁德职业技术学院信息技术与工程系,福建福安355000;宁德职业技术学院机电工程系,福建福安355000【正文语种】中文【中图分类】TP1830 引言PID控制(比例、积分和微分控制)是工业过程控制中应用较为广泛的控制策略之一,具有算法简单、容易实现及可靠性高等特点,适用于可建立精确数学模型的确定性系统,而实际工业生产中的控制系统大都存在严重的时变性、滞后性、非线性和现场干扰等,难于建立精确的数学模型,采用常规PID控制已无法满足系统的控制要求。
针对常规PID控制由于参数不能在线自整定,对非线性时变对象无法取得好的控制效果,目前已有学者将智能控制技术应用于常规PID控制[1-6]。
模糊控制无需建立被控对象精确的数学模型,以模糊集合理论为基础,凭借专家知识、人工经验制定规则,利用模糊逻辑推理方法,实现对被控对象的智能控制,具有良好的鲁棒性和适应性,但确定其模糊规则和隶属度函数依赖于经验,缺乏自学习能力。
基于神经网络的闭环控制学习算法一、神经网络在闭环控制中的应用概述神经网络作为一种强大的机器学习模型,其在闭环控制系统中的应用日益广泛。
闭环控制系统,又称为反馈控制系统,是指系统输出与期望输出之间存在反馈回路的控制系统。
在这种系统中,控制算法根据系统输出与期望输出之间的误差来调整控制输入,以达到控制目标。
神经网络因其出色的非线性映射能力和自适应学习能力,在处理复杂系统和不确定性环境中显示出了巨大的潜力。
1.1 神经网络的基本原理神经网络是由大量简单的计算单元(称为神经元)组成的网络,这些神经元通过加权连接相互连接。
每个神经元接收输入信号,进行加权求和,并通过激活函数处理后输出。
通过调整神经元之间的连接权重,神经网络可以学习到输入与输出之间的复杂映射关系。
1.2 神经网络在闭环控制中的作用在闭环控制系统中,神经网络可以用于建模、预测、控制和优化等多个方面。
它可以学习系统的动态行为,预测系统的未来状态,或者直接作为控制器来调整控制输入。
此外,神经网络还可以用于处理系统的不确定性和非线性,提高系统的鲁棒性和适应性。
二、基于神经网络的闭环控制学习算法基于神经网络的闭环控制学习算法是一类利用神经网络来实现闭环控制的算法。
这些算法通过训练神经网络来学习控制策略,以实现对系统的精确控制。
以下是几种典型的基于神经网络的闭环控制学习算法:2.1 反向传播算法(Backpropagation)反向传播算法是神经网络中最常用的学习算法之一。
它通过计算网络输出与期望输出之间的误差,并将误差反向传播至网络的输入层,以此调整网络权重。
在闭环控制系统中,反向传播算法可以用来训练神经网络控制器,使其能够根据系统误差来调整控制输入。
2.2 强化学习算法(Reinforcement Learning)强化学习是一种无模型的学习算法,它通过与环境的交互来学习最优策略。
在闭环控制系统中,强化学习算法可以使神经网络控制器通过试错来学习如何控制系统,以达到最优性能。
基于BP神经网络的自整定PID控制仿真一、实验目的1.熟悉神经网络的特征、结构及学习算法。
2.通过实验掌握神经网络自整定PID的工作原理。
3.了解神经网络的结构对控制效果的影响。
4. 掌握用Matlab实现神经网络控制系统仿真的方法。
二、实验设备及条件1.计算机系统2.Matlab仿真软件三、实验原理在工业控制中,PID控制是工业控制中最常用的方法。
这是因为PID控制器结构简单,实现简单,控制效果良好,已得到广泛应用。
但是,PID具有一定的局限性:被控制对象参数随时间变化时,控制器的参数难以自动调整以适应外界环境的变化。
为了使控制器具有较好的自适应性,实现控制器参数的自动调整,可以采用神经网络控制的方法。
利用神经网络的自学习这一特性,并结合传统的PID控制理论,构造神经网络PID控制器,实现控制器参数的自动调整。
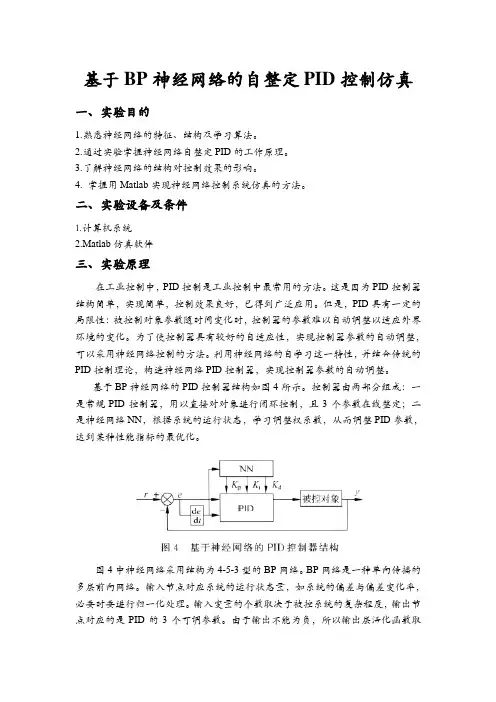
基于BP神经网络的PID控制器结构如图4所示。
控制器由两部分组成:一是常规PID控制器,用以直接对对象进行闭环控制,且3个参数在线整定;二是神经网络NN,根据系统的运行状态,学习调整权系数,从而调整PID参数,达到某种性能指标的最优化。
图4中神经网络采用结构为4-5-3型的BP网络。
BP网络是一种单向传播的多层前向网络。
输入节点对应系统的运行状态量,如系统的偏差与偏差变化率,必要时要进行归一化处理。
输入变量的个数取决于被控系统的复杂程度,输出节点对应的是PID的3个可调参数。
由于输出不能为负,所以输出层活化函数取2()(1)()(1)1(1)a k y k y k u k y k -=+-+-非负的Sigmoid 函数,隐含层取正负对称的Sigmoid 函数。
本系统选取的BP 网络结构如图5所示。
网络的学习过程由正向和反向传播两部分组成。
如果输出层不能得到期望输出,那么转入反向传播过程,通过修改各层神经元的权值,使得误差信号最小。
输出层节点分别对应3个可调参数K p 、K i 、K d 。
基于模糊神经网络的温度控制系统设计随着温度控制技术的发展,温度控制系统的精确性和可靠性已经被广泛应用于各个行业,从汽车制造业到化学工艺,从冶金到电子工程,温度控制系统已经成为维护各类工艺技术的基础设施。
由于这种应用的重要性,对温度控制系统进行研究和改进一直都是众多研究者感兴趣的领域,模糊神经网络(FNN)为改进温度控制系统提供了新的思路。
一、温度控制的基本原理温度控制是一种控制现象,涉及被控对象的温度反馈系统,这是一个“输入-输出”模型,它指的是系统的输入和输出的关系,在工业中应用温度控制,该模型由输入和输出环节组成。
输入部分称为控制律,它是一种控制量,用来确定控制系统输出的变化;而输出则为实际控制值,它指示被控对象的状态,如温度和压力。
二、模糊神经网络在温度控制系统中的应用模糊神经网络(FNN)是一种模糊控制理论中的神经网络结构,它通过模糊推理算法来解决模糊逻辑问题,具有自适应性和决策性,多次引用系统的非线性性质,能够对被控对象的各种状态进行有效控制,因此,模糊神经网络在温度控制系统中被广泛应用。
模糊控制器采用模糊规则定义规则,并且可以根据系统状态更新规则,使用自适应技术来跟踪变化的状态,而模糊神经网络则利用神经网络的技术,对模糊控制器的表现进行评价,使其具有自适应性和可调节性,从而提高温度控制的精度和准确性。
三、基于模糊神经网络的温度控制系统设计基于模糊神经网络的温度控制系统主要分为数据处理部分、模糊决策部分和控制决策部分。
首先,采用控制对象的反馈信号作为输入,输入到温度控制系统中,然后进行数据处理,将实时温度信号转换为规定的模糊变量,再利用模糊推理算法,根据模糊变量决定出控制变量,最后进行参数估计和控制决策,从而实现对控制对象的温度控制。
四、基于模糊神经网络的温度控制优势(1)模糊神经网络的自适应性强,采用模糊规则建立模糊控制器,可以根据实际系统状态自动调整控制量,使之自动适应环境的变化,从而实现控制的准确性和精确性;(2)模糊神经网络在模糊控制器的基础上,引入神经网络技术,使其具有仿生学上一种行为,具有可调节性和反馈性,能够对不确定的控制对象有效控制,提高温度控制的精度和准确性;(3)模糊神经网络的实现比较简单,因为采用的是模板匹配算法,不需要考虑系统的模型参数,只需要调整模板变量即可,使温度控制系统设计变得非常容易和快捷。
- 22 -高 新 技 术从本质上来看,PID 控制算法就是对比例、积分和比例微分间的关系进行控制的一种算法。
PID 控制调节器具有适应性强、鲁棒性良好的特征,因此被广泛应用于工业控制领域。
但是,随着科学技术、控制理论发展,在工业生产中被控对象逐渐向复杂化和抽象化的趋势发展,并呈现滞后性、时变性和非线性的特征,这使传统PID 控制器难以精准调控这种较复杂的控制系统。
为了解决该问题,研究人员将控制理论与其他先进的算法相结合,形成全新的控制理论,包括神经网络控制、遗传算法以及模糊控制等。
对神经网络算法来说,由于其具有较高的鲁棒性和容错性,因此适用于复杂的非线性控制系统中,并且具有广阔的应用前景和较大的发展潜力。
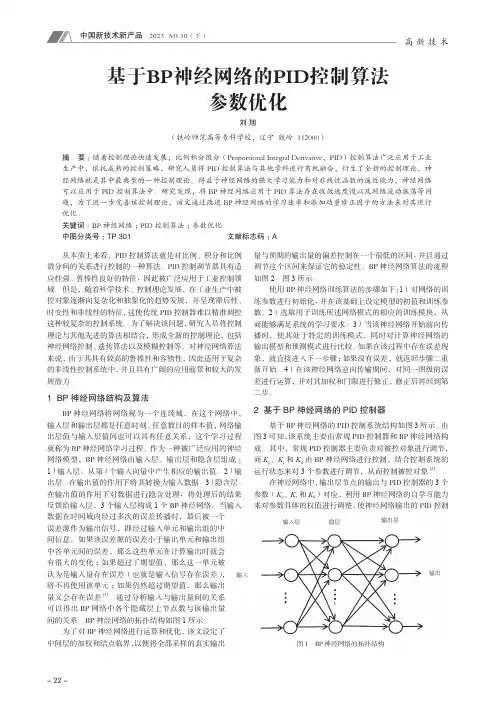
1 BP 神经网络结构及算法BP 神经网络将网络视为一个连续域,在这个网络中,输入层和输出层都是任意时刻、任意数目的样本值,网络输出层值与输入层值间也可以具有任意关系,这个学习过程就称为BP 神经网络学习过程。
作为一种被广泛应用的神经网络模型,BP 神经网络由输入层、输出层和隐含层组成:1) 输入层。
从第i 个输入向量中产生相应的输出值。
2) 输出层。
在输出值的作用下将其转换为输入数据。
3) 隐含层。
在输出值的作用下对数据进行隐含处理,将处理后的结果反馈给输入层,3个输入层构成1个BP 神经网络。
当输入数据在时间域内经过多次的误差传播时,最后被一个误差源作为输出信号,即经过输入单元和输出组的中间信息。
如果该误差源的误差小于输出单元和输出组中各单元间的误差,那么这些单元在计算输出时就会有很大的变化;如果超过了期望值,那么这一单元被认为是输入量存在误差(也就是输入信号存在误差),将不再使用该单元;如果仍然超过期望值,那么输出量又会存在误差[1]。
通过分析输入与输出量间的关系可以得出BP 网络中各个隐藏层上节点数与该输出量间的关系。
BP 神经网络的拓扑结构如图1所示。
为了对BP 神经网络进行运算和优化,该文设定了中间层的加权和结点临界,以便将全部采样的真实输出量与预期的输出量的偏差控制在一个很低的区间,并且通过调节这个区间来保证它的稳定性。
基于BP神经网络PID整定原理和算法步骤PID(比例、积分、微分)控制是一种常用的控制算法,用于调节系统的输出使其接近期望值。
BP(Back Propagation)神经网络是一种具有强大机器学习能力的神经网络模型。
基于BP神经网络的PID整定方法结合了PID控制算法和神经网络的优点,通过神经网络的学习能力优化PID 参数的选择,提高了控制系统的鲁棒性和适应性。
以下是基于BP神经网络的PID整定原理和算法步骤:一、原理:1.神经网络模型:建立一个具有输入层、隐藏层和输出层的BP神经网络模型,其中输入层接收系统的输入信号,输出层输出控制信号的PID 参数,隐藏层的神经元通过学习调整连接权重以优化参数选择。
2.参数训练:基于反向传播算法,通过输入输出样本对神经网络进行训练,使其学习输入输出之间的映射关系。
训练过程是一个迭代过程,通过不断调整连接权重和偏置,使神经网络的输出结果逼近期望值。
3.PID原理:PID控制算法根据系统当前误差,通过比例、积分和微分项生成控制信号。
调节PID参数可以改变控制信号的响应特性,使其更好地适应控制对象的动态特性。
二、算法步骤:1.数据采集:收集系统的输入输出数据,用于训练神经网络模型。
2.数据预处理:对采集到的数据进行预处理,包括去除噪声、归一化等处理,以提高神经网络的训练效果。
3.网络构建:根据需要构建BP神经网络模型,包括输入层、隐藏层和输出层。
隐藏层的神经元数量和层数可以根据实际情况进行选择。
4.神经网络训练:将预处理后的数据输入到神经网络中,利用反向传播算法对神经网络进行训练。
根据实际需求设置训练的轮数和学习率等参数。
5.训练结果评估:通过评估神经网络的训练结果,包括误差曲线、训练时间等指标,来判断训练是否达到预期效果。
6.PID参数优化:根据神经网络的输出结果调整PID的比例、积分和微分参数。
可以通过试错法或者自适应控制方法对参数进行调整。
7.控制性能评估:利用调整后的PID参数进行控制,通过评估系统的性能指标,例如超调量、调整时间等,来判断PID参数的选择是否合理。
现有的控制理论及其优缺点以及未来控制理论的发展趋势机硕1005班邹锐3111003015摘要:现有的控制理论主要有经典控制理论,现代控制理论,相平面法,描述函数法,绝对稳定性理论,李亚普诺夫稳定性理论,输入输出稳定性理论,微分几何方法,微分代数方法,变结构控制理论,非线性系统的镇定设计,逆系统方法,神经网络方法,非线性频域控制理论,混沌动力学方法等。
这些理论各有自己的研究重点和优缺点。
本文对这些理论及其优缺点进行了论述并探讨了未来控制理论的发展趋势。
关键词:现有控制理论,优缺点,发展方向1经典控制理论控制理论的发展已经经过了近百年的历程,并在控制系统设计这一工程领域发挥着巨大的作用[1]。
例如,在现代社会的工业化进程,科学探索,国防军备的现代化,以及人们的日程生活中发挥着越来越大的作用。
迄今为止,控制理论已经经过了经典控制和现代控制理论阶段。
对于控制理论的发展,最早可追溯到两千年前,当时我国发明的指南车,水运仪象台等已经包含有自动控制的基本原理,这是控制理论的萌芽阶段。
随着科学技术与工业的发展,到十七十八世纪,自动控制技术逐渐应用到现代工业中。
例如1681年法国物理学家,发明家D.Papin发明了用作安全调节装置的锅炉压力调节器。
到1788年,英国人瓦特在他发明的蒸汽机上使用了离心调速器,解决了蒸汽机的速度控制问题,引起了人们对控制技术的重视,这是控制理论的起步阶段。
1868年,英国物理学家麦克斯韦通过对调速系统先行常微分方程的建立和分析解决了速度控制系统中出现的剧烈震荡的速度不稳定性问题,提出了简单的稳定性判据,开启了用数学方法研究控制系统的途径。
之后,数学家劳斯,赫尔维茨,奈奎斯特,伯德等人相继提出了各种控制方法。
这是控制理论的发展阶段。
1947年,控制论的奠基人美国数学家维纳出版了《控制论—关于在动物和机器中控制与通讯的科学》。
1948年,美国科学家伊万斯创立了根轨迹分析方法。
我国著名科学进钱学森于1954年出版了《工程控制论》。
基于神经网络的自适应滑模控制算法一、基于神经网络的自适应滑模控制算法概述自适应滑模控制算法是一种先进的控制策略,它能够在系统存在不确定性和外部干扰的情况下,保证系统的稳定性和性能。
近年来,随着神经网络技术的发展,基于神经网络的自适应滑模控制算法逐渐成为研究的热点。
该算法通过神经网络来逼近系统的不确定性和非线性部分,从而实现对复杂系统的精确控制。
1.1 神经网络在控制算法中的应用神经网络因其强大的非线性映射能力和自学习能力,在控制系统中得到了广泛的应用。
它可以被训练来逼近任意复杂的非线性函数,这使得神经网络成为处理系统不确定性和非线性的理想工具。
1.2 自适应滑模控制算法的基本原理自适应滑模控制算法的核心思想是在系统的滑动面附近设计一个控制律,使得系统状态能够沿着滑动面滑动,最终达到期望的状态。
算法的自适应特性体现在能够根据系统状态的变化动态调整控制参数,以适应系统的变化。
1.3 基于神经网络的自适应滑模控制算法的优势将神经网络与自适应滑模控制算法相结合,可以充分发挥两者的优势。
神经网络能够处理系统的不确定性和非线性,而自适应滑模控制算法能够保证系统的稳定性和性能。
这种结合不仅提高了控制算法的鲁棒性,还增强了其适应性。
二、基于神经网络的自适应滑模控制算法的关键技术基于神经网络的自适应滑模控制算法涉及多个关键技术,包括神经网络的设计、训练、参数调整以及滑模控制律的设计等。
2.1 神经网络的设计神经网络的设计是算法成功的关键。
需要选择合适的网络结构、激活函数和学习算法,以确保网络能够有效地逼近系统的不确定性和非线性部分。
2.2 神经网络的训练神经网络的训练是算法实施的基础。
通过大量的训练数据,网络可以学习到系统的动态特性,从而提高控制算法的性能。
2.3 参数调整策略参数调整策略是算法自适应性的核心。
需要设计合适的调整机制,使得控制参数能够根据系统状态的变化动态调整,以适应系统的变化。
2.4 滑模控制律的设计滑模控制律的设计是算法实现稳定性和性能的关键。