(完整版)机械原理课后全部习题答案
- 格式:doc
- 大小:5.35 MB
- 文档页数:72

第2章 机构的结构分析(P29)2-12:图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
解:分析机构的组成:此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。
偏心轮1’与机架9、连杆2与滑杆3、滑杆3与摆杆4、摆杆4与滚子6、齿轮5与机架9、滑块7与冲头8均组成转动副,滑杆3与机架9、摆杆4与滑块7、冲头8与机架9均组成移动副,齿轮1与齿轮5、凸轮(槽)5与滚子6组成高副。
故解法一:7=n 9=l p 2=h p12927323=-⨯-⨯=--=h l p p n F解法二:8=n 10=l p 2=h p 局部自由度1='F11210283)2(3=--⨯-⨯='-'-+-=F p p p n F h l(P30) 2-17:试计算如图所示各机构的自由度。
图a 、d 为齿轮-连杆组合机构;图b 为凸轮-连杆组合机构(图中在D 处为铰接在一起的两个滑块);图c 为一精压机机构。
并问在图d 所示机构中,齿轮3与5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?解: a) 4=n 5=l p 1=h p11524323=-⨯-⨯=--=h l p p n Fb) 5=n 6=l p 2=h p12625323=-⨯-⨯=--=h l p p n F12625323=-⨯-⨯=--=h l p p n Fc) 5=n 7=l p 0=h p10725323=-⨯-⨯=--=h l p p n Fd) 6=n 7=l p 3=h p13726323=-⨯-⨯=--=h l p p n F(C 可看做是转块和导块,有1个移动副和1个转动副)齿轮3与齿轮5的啮合为高副(因两齿轮中心距己被约束,故应为单侧接触)将提供1个约束。




[标签:标题]篇一:机械原理(西工大第七版)课后答案2-7章精选第二章题2-2 图a所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
解:分析机构的组成:此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。
偏心轮1’与机架9、连杆2与滑杆3、滑杆3与摆杆4、摆杆4与滚子6、齿轮5与机架9、滑块7与冲头8均组成转动副,滑杆3与机架9、摆杆4与滑块7、冲头8与机架9均组成移动副,齿轮1与齿轮5、凸轮(槽)5与滚子6组成高副。
故解法一:n?7 pl?9ph?2可绕固定轴心C转动的圆柱4中滑动。
当偏心轮1按图示方向连续转动时,可将设备中的空气按图示空气流动方向从阀5中排出,从而形成真空。
由于外环2与泵腔6有一小间隙,故可抽含有微小尘埃的气体。
试绘制其机构的运动简图,并计算其自由度。
解:1)取比例尺,绘制机构运动简图。
(如图题2-3所示)4AF?3n?2pl?ph?3?7?2?9?2?1解法二:n?8 pl?10 ph?2 局部自由度题2-32) n?3 pl?4 ph?0F??1F?3n?2pl?ph?3?3?2?4?0?1题2-4 使绘制图a所示仿人手型机械手的食指机构的F?3n?(2pl?ph?p?)?F??3?8?2?10?2?11题2-3如图a所示为一新型偏心轮滑阀式真空泵。
其偏心轮1绕固定轴A转动,与外环2固连在一起的滑阀3在机构运动简图(以手指8作为相对固定的机架),并计算其自由度。
解:1)取比例尺,绘制机构运动简图。
(如图2-4所示)2) n?7 pl?10 ph?0F?3n?2pl?ph?3?7?2?10?0?13题2-4题2-5 图a所示是为高位截肢的人所设计的一种假肢膝关节机构,该机构能保持人行走的稳定性。

机械原理第三版课后答案1. 机械原理基础知识。
1.1 什么是机械原理?机械原理是研究机械运动规律和力学性能的科学,它是工程学的基础学科之一。
通过机械原理的研究,可以揭示机械系统的运动规律和力学性能,为机械设计和工程实践提供理论依据。
1.2 机械原理的基本概念。
机械原理涉及的基本概念包括力、力的作用点、力的方向、力的大小、力的合成、力的分解、平行力的平衡条件、力的偶力、力的力矩、力的力矩平衡条件等。
这些基本概念是理解机械原理的基础,对于解决机械系统的运动和力学问题具有重要意义。
2. 机械原理的应用。
2.1 机械原理在机械设计中的应用。
在机械设计中,机械原理可以用来分析和计算机械系统的运动规律和力学性能,为机械产品的设计提供理论依据。
比如,通过机械原理可以确定机械零件的尺寸、结构和材料,使得机械产品具有良好的运动性能和工作效率。
2.2 机械原理在工程实践中的应用。
在工程实践中,机械原理可以用来分析和解决机械系统的故障和问题,指导工程师进行维修和改进。
比如,通过机械原理可以判断机械系统是否处于平衡状态,分析机械系统的运动轨迹和受力情况,为工程实践提供技术支持。
3. 机械原理的发展趋势。
3.1 数值模拟技术在机械原理中的应用。
随着计算机技术的发展,数值模拟技术在机械原理中得到了广泛应用。
通过数值模拟技术,可以对复杂的机械系统进行模拟和分析,为机械设计和工程实践提供更精确的数据和方法。
3.2 智能化技术在机械原理中的应用。
智能化技术在机械原理中的应用也越来越广泛。
通过智能化技术,可以实现机械系统的自动化控制和优化设计,提高机械产品的性能和可靠性。
4. 结语。
机械原理是工程学的基础学科,它对于理解和应用机械系统具有重要意义。
在未来的发展中,机械原理将会与计算机技术和智能化技术相结合,为机械设计和工程实践带来新的发展机遇。
希望大家能够认真学习机械原理,不断提高自己的理论水平和实践能力,为机械工程事业做出更大的贡献。

机械原理第九版课后题答案1. 多杆杆机构1.题目:一个三杆杆机构可构成一个正运动副吗?答案:一个三杆杆机构可以构成一个正运动副,只需要其中两个杆满足以下条件即可:–杆的长度之和大于第三个杆的长度。
–两个杆的长度之差小于第三个杆的长度。
2.题目:判定一个六杆机构能否构成一个运动副。
答案:判定一个六杆机构能否构成一个运动副,可以有两种方法:1.根据杆的数目和自由度之间的关系,自由度即为杆数减去2。
•六杆机构的自由度为6-2=4,而运动副的自由度为1,因此六杆机构不能构成一个运动副。
2.根据六杆机构的几何特性,判定它是否为运动副,如判断杆的长度是否满足某些条件。
3.题目:一个六杆机构有一个杆为固定杆,其他杆均可任意旋转,是否可以构成一个四杆机构?答案:一个六杆机构有一个杆为固定杆,其他杆均可任意旋转,可以构成一个四杆机构。
由于固定杆不会运动,因此可以将它从机构中去掉,这样剩下的五杆就构成了一个四杆机构。
2. 齿轮传动4.题目:两个齿轮的模数分别为4和6,齿数分别为24和36,求它们的传动比。
答案:传动比可以通过齿轮的齿数比和模数比来计算。
传动比等于从驱动齿轮到被动齿轮的转速比,即被动齿轮的齿数除以驱动齿轮的齿数。
传动比 = 36 / 24 = 1.55.题目:一个齿轮传动系统,输入齿轮的转速为2000 rpm,输出齿轮的齿数为40。
如果两个齿轮的模数相等,求输出齿轮的转速。
答案:齿轮传动系统的转速比等于被动齿轮的齿数除以驱动齿轮的齿数。
假设输入齿轮的转速为N1,输出齿轮的转速为N2,输入齿轮的齿数为Z1,输出齿轮的齿数为Z2,则有公式:转速比 = N2 / N1 = Z2 / Z1在本题中,已知N1 = 2000 rpm,Z2 = 40,且两个齿轮的模数相等,即Z1 = Z2,所以有:N2 / 2000 = 40 / 40N2 = 2000 rpm6.题目:一个齿轮传动系统中,输入齿轮的齿数为20,传动比为4,求输出齿轮的齿数。
2-8解:(1)取μ= m/mml作机构位置图如(a)图(2)求v、ω、列矢量方程式取μ,作速度(b)图v(3)求a、α列矢量方程式作加速度(c)图题5-8解αa1=arccos(rb/ra1)=arccos[(z1cosα)/(z1+2ha*)] =31°46′O1 α PN2B2N1αa2=26°14′10″B1P=B1N1-N1PB1 PbⅠ=mz1/2·cosα(tgαa1- tgα′)=11.39mm B2P=12.72mm B1B2=24.11mm 作用弧CD=B1B2cosα′=25.66mm 作用角 ϕ 1 =CD/r1′=25.66/47.5=30°58 ′αⅡO2εα=B1B2/Pb=1.63题5-12解N 1 N 2 = 2 N 1 P = 2r sin α N 1 N 2 2r sin α ∴ tgα a = = = 2tgα = 0.7279 O1 N 1 r cos α 3′ α a = 36° 9″ rb r cos α z cos α 又 cos α a = = = * ra r + ha z + 2ha* 2ha cos α ∴z = = 12.323 cos α − cos α aO1 α ra rb (B2) αa P rb ra αa α O2 N1(B1) N2∴不根切,z最少为13题5-13解h m − xm = MN* aMN = PN sinα = OPsin2 α mz 2 = sin α 2* az 2 x = h − sin α 2x=1-35/2 sin 20° =-1.0471 or x=(17-35)/17=-1.05882题5-15解解题思路: 1.设计题,主要确定尺寸 r 、ra、r f 、rb 2.变位齿轮传动设计步骤:由 a 、 a ′、 α → α ′ → x Σ → x 1、 x 2 ← x min ← 据 z = 12 z Σ、 α 、 α ′ → y 、 x Σ → ∆ y 计算: r 、 ra、 r f 、 rb 3 .验证 s a < 0 .2 m 、 ε α ≥ 1题5-15解1.选择传动类型 2. 求 α ′和 x Σα ′ = arccos(m a = ( z1 + z 2 ) = 120mm < a ′ 2a cos α ) = 29 ° 5 0 ′ 2 8 ′′ a′x∑( z 1 + z 2 )( inv α ′ − inv α ) = = 1 . 2505 2 tg α17 − 12 z1 = z2 = 12 < 17,∴ x1.2 > = 0.2941 17 ∴ x1 = x2 = x∑ / 2 = 1.2505/ 2 = 0.62533.分配 x 1 和 x 24.求y和∆y y = (a ′ − a ) / m = (130 − 120) / 10 = 1; ∆y = x ∑ − y = 0.2505 mz 1.2 = 60mm 5.r1.2 = 2 * ra 1.2 = r1.2 + ( ha + x1.2 − ∆y )m = 73.75mm* r f 1.2 = r1.2 − ( ha + c * − x1.2 )m = 53.75mmmz 1.2 rb1.2 = cos α = 56.38mm 2 6.验算sa 和ε α ′23 s = (π / 2 + 2 x1.2 tgα )m = 20.26mm ;α a 1.2 = arccos(rb1.2 / ra 1.2 ) = 40°8 ″ sa 1.2 = s ra 1.2 − 2ra 1.2 ( invα a 1.2 − invα ) r1.2 73.75 − 2 × 73.75(0.142715 − 0.014904) = 6.05mm > 0.2m 60= 20.26 ×题5-15解1 [ z1 ( tgα a 1 − tgα ′ ) + z 2 ( tgα a 2 − tgα ′ )] εα = 2π 1 = z1 ( tgα a 1 − tgα ′ ) = 1.03π题5-16解 用等变位修复,小正变位;大负变位* * ∆d a 2 = d 2 + 2( ha + x 2 )m − ( d 2 + 2ha m ) = 2 x 2 m则 x 2 = ∆d a 2 / 2m = −1 而 x1 = − x 2 = 1d 1 = 96mm ; d 2 = 384mm ; d a 1 = 112mm ; d a 2 = 384mm ; d f 1 = 94mm ; d f 2 = 366mm ; d b1 = 90.21mm ; d b 2 = 360.84mm ; a ′ = a = 240mm .验算sa 和ε α d b1 α a 1 = arccos( ) = 36°21′; d a1α a 2 = 20° sa 1 = πm / 2 • d a 1 / d 1 − d a 1 ( invα a 1 − invα )= 1.02mm > 0.2m sa 2 ↑ 不验算 1 εα = [ z1 ( tgα a 1 − tgα ) + z 2 ( tgα a 2 − tgα )] 2π = 1.42mn (1 ) a ′ = a 12 = ( z3 + z4 ) 34 2 cos β ∴ cos β = 0 . 79412 , β = 37 ° 25 ′ 41 ″ m n z3 ( 2 )d 3 = m t z 3 = = 45 .33 mm ; d 4 = m t z 4 = 90 .67 mm ; cos β* d f 3 = d 3 − 2 ( han + c * ) m = 40 .33 mm ; d f 4 = 85 .67 mm ; * d a 3 = d 3 + 2 han m = 49 .33 mm ; d a 4 = 94 .67 mm tg α t = tg α n / cos β = 0 .4583 ; α t′ = α t = 24 ° 37 ′ 25 ″题5-20解d b 3 = d 3 cos α t = 41 .21 mm ; d b 4 = 82 . 42 mmα at 3 = arccos( d b 3 / d a 3 ) = 33 ° 20 ′ 35 ″; α at 4 = 29 ° 28 ′ 16 ″ εγ = εα + ε β= 3 . 118 1 = [ z 3 ( tg α at 3 − tg α t ) + z 4 ( tg α at 4 − tg α t )] 2π。

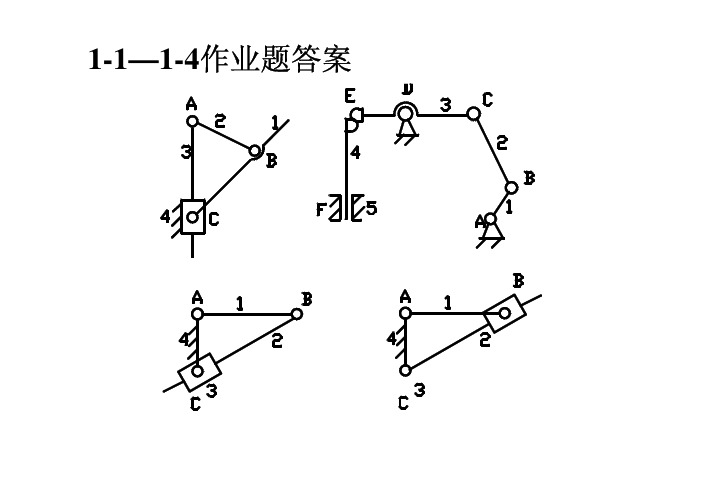
机械原理习题及答案 Prepared on 22 November 2020第二章 平面机构的结构分析 2-1 绘制图示机构的运动简图。
2-3 计算图示机构的自由度,并指出复合铰链、局部自由度和虚约束。
解:(a) C 处为复合铰链。
7,n =p h =0,p l =10。
自由度 323721001W l h F n p p =--=⨯-⨯-=。
(b) B 处为局部自由度,应消除。
3n =, p h =2,p l =2自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(c) B 、D 处为局部自由度,应消除。
3n =, p h =2,p l =2。
自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(d) CH 或DG 、J 处为虚约束,B 处为局部自由度,应消除。
6n =,p h =1,p l =8。
自由度 32362811W l h F n p p =--=⨯-⨯-=。
(e) 由于采用对称结构,其中一边的双联齿轮构成虚约束,在连接的轴颈处,外壳与支架处的连接构成一个虚约束转动副,双联齿轮与外壳一边构成虚约束。
其中的一边为复合铰链。
其中4n =,p h =2,p l =4。
自由度 32342422W l h F n p p =--=⨯-⨯-=。
(f) 其中,8n =,p h =0,p l =11。
自由度 323821102W l h F n p p =--=⨯-⨯-=。
(g) ① 当未刹车时,6n =,p h =0,p l =8,刹车机构自由度为② 当闸瓦之一刹紧车轮时,5n =,p h =0,p l =7,刹车机构自由度为③ 当两个闸瓦同时刹紧车轮时,4n =,p h =0,p l =6,刹车机构自由度为2-3 判断图示机构是否有确定的运动,若否,提出修改方案。
分析 (a) 要分析其运动是否实现设计意图,就要计算机构自由度,不难求出该机构自由度为零,即机构不能动。

第一章机构的结构分析2-3.计算下列各机构的自由度。
注意分析其中的虚约束、局部自由度合复合铰链等。
题图1-4c所示机构,导路AD⊥AC、BC=CD/2=AB。
该机构可有多种实际用途,可用于椭圆仪,准确的直线轨迹产生器,或作为压缩机或机动马达等。
题图1-4d为一大功率液压动力机。
其中AB=A`B`,BC=B`C`,CD=C`D`,CE=C`E`,且E、E`处于滑块移动轴线的对称位置。
答c)为轨迹重合虚约束,可认为AB杆或滑块之一构成虚约束。
F=3×3-2×4=1;d)对称的上部分或下部分构成虚约束。
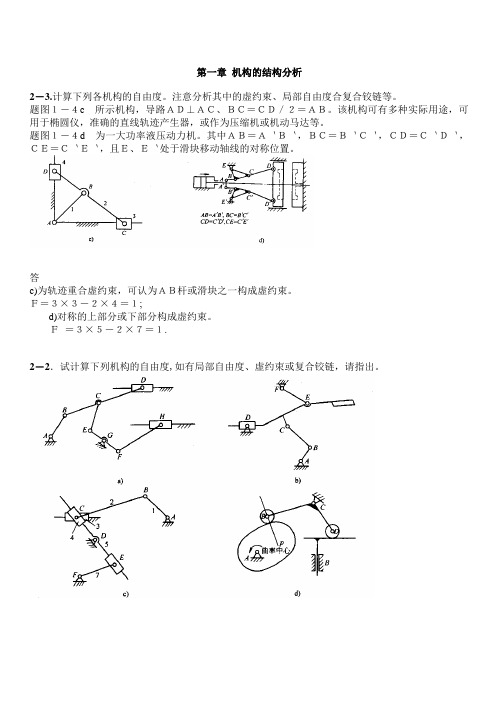
F=3×5-2×7=1.2-2.试计算下列机构的自由度,如有局部自由度、虚约束或复合铰链,请指出。
e)答案:a)F=3×7-2×10=1.注意其中的C、G、D、H点并不是复合铰链。
b)F=3×5-2×7=1C)F=3×7-2×10=1其中C点为复合铰链,分别由2、3、4构件在C点构成复合铰。
d)F=3×3-2×3-2=1或者F=3×5-2×5-2-2=1其中B、D处的滚子具有局部自由度。
(e) F=3×9-2×12-1-1=1或者:F=3×8-2×11-1=1(注意:BCD组成的三角形为一个构件)其中B点为局部自由度2-3试计算如图所示各平面高副机构的自由度,如有局部自由度、虚约束或复合铰链,请指出。
答:C点为局部自由度,E、F其中一点为虚约束。
F= 3×5-2×6-1-1=1或者:F=3×4-2×5-1=1第三章平面连杆机构及其分析与设计3-1.试求题图所示各机构在图示位置时全部瞬心的位置.答案:瞬心P 12在A 点 瞬心P 23、 P 24均在B 点 瞬心P 34在C 点 P 14、 P 13均在垂直导路的无 瞬心P 23、 P 13均在B 点 穷远处 瞬心P 14、 P 24均在D 点3-5在图示的齿轮-连杆组合机构中,试用瞬心法求齿轮1与齿轮3的传动比31/ωω。
机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
解:a)平面高副b)空间低副c)平面高副2-8将图2-27中机构的结构图绘制成机构运动简图,标出原动件和机架,并计算其自由度。
解:b)n=3,L P =4 ,H P =0, F=3×3-2×4=1P=4 ,P H=0,F=3×3-2×4=1 c) n=3,L2-9 试判断图2-28中所示各“机构”能否成为机构,并说明理由。
解:H ) 4 6 P 034260 L a n P F ====⨯-⨯=不是机构修改后的机构H ) 3 4 P 134260 L b n P F ====⨯-⨯=不是机构修改后的机构H ) 2 3 P 032230 L c n P F ====⨯-⨯=不是机构修改后的机构H )10 14 P 0310214 2 L d n P F ====⨯-⨯=是机构2-10 计算图2-29中所示各机构的自由度,并指出其中是否含有复合铰链、局部自由度或虚约束,说明计算自由度应作何处理。
解: a)n=5,P=7 ,L有复合铰链:构件3和构件5; 构件3和构件1; F=3n-2P=3×5-2×7=1Lb) n=6,P=8,PH=1,有局部自由度,有虚约束LF=3n-2P-H P=3x6-2x8-1=1Ld) 有虚约束,有复合铰链n=5,P=7,H P=0,LF=3n-2P-H P=3×5-2×7-0=1Le) 有对称虚约束n=5,P=7LF=3n-2P=1Lf)有对称虚约束n=3,P=3,H P=2LF=3n-2P-H P=1Lg) n=2,P=2,H P=1,n=3,L P=4 有虚约束Lh) 有对称虚约束,n=3,P=4LF=3n-2P=3×3-2×4=1L或者:n=4,P=5 H P=1,LF=3n-2L P -H P =3×4-2×5-1=12-12计算图2-30所示各机构的自由度,并在高副低代后,分析组成这些机构的基本杆组即杆组的级别。
解: a)n=4, L P =5, H P =1F=3n-2L P -H P =1 所以此机构为III 级机构b) n=3, L P =3, H P =2F=3n-2L P -H P =1c) n=4,L P =4,H P =3F=3n-2L P -H P =1 d)n=6, L P =8 ,H P =1F=3n-2L P -H P =1 所以此机构为III 级机构2-13 说明图2-32所示的各机构的组成原理,并判别机构的级别和所含杆组的数目。
对于图2-32f 所示机构,当分别以构件1、3、7作为原动件时,机构的级别会有什么变化?a)机构的级别:II b)机构的级别:IIf)当分别以构件1、3、7作为原动件时以构件1作为原动件时,以构件1作为原动件时,机构的级别II以构件3作为原动件时,以构件3作为原动件时,机构的级别:II 以构件7作为原动件时,杆组的级别:III以构件7作为原动件时,机构的级别:III2-14 绘制图2-33所示机构高副低代后的运动简图,计算机构的自由度。
并确定机构所含杆组的数目和级别以及机构的级别。
图2-33 机构示意图机构高副低代后的运动简图杆组的级别:III所以,机构的级别:III2-15 试分析图2-35所示刨床机构的组成,并判别机构的级别。
若以构件4为原动件,则此机构为几级?解:F=3n-2L P -H P =3×5-2×7=1一、若以构件1为原动件,则此机构拆分的杆组是:所以此机构为III 级二、若以构件4为原动件,则此机构拆分的杆组是:所以此机构为II级第三章 平面连杆机构3-9图3-54所示平面铰链四杆运动链中,已知各构件长度分别为55AB l mm =,40BC l mm =, 50CD l mm =,25AD l mm =。
(1)判断该机构运动链中四个转动副的类型。
(2)取哪个构件为机架可得到曲柄摇杆机构。
(3)取哪个构件为机架可得到双曲柄机构。
(4)取哪个构件为机架可得到双摇杆机构解:平面连杆机构L AB =55 L BC =40 L CD =50 L AD =25 L AB +L AD <L BC +L CD(1) A 、D 整转副 B 、C 摆转副(2)AB 或CD 为机架时,为曲柄摇杆机构 (3)AD 为机架时,为双曲柄机构 (4)BC 为机架时,为双摇杆机构3-10 图3-57所示为一偏置曲柄滑块机构,试求杆AB 为曲柄的条件。
若偏距e =0,则杆AB 为曲柄的条件又如何?解:主要分析能否通过极限位置,a+e<b3-11在图3-81所示的铰链四杆机构中,各杆件长度分别为25AB l mm =,40BC l mm =,50CD l mm =,55AD l mm =。
(1)若取AD 为机架,求该机构的极位夹角θ,杆CD 的最大摆角ϕ和最小传动角0min γ(2)若取AB 为机架,求该机构将演化为何种类型的机构?为什么?请说明这时C 、D 两个转动副是周转副还是摆转副。
图3-58 铰链四杆机构解:由于25+55<40+50,所以l AB +l AD ≤l BC +l CD ,且以最短杆AB的邻边为机架。
故该铰链四杆机构为曲柄摇杆机构。
AB为曲柄。
1)以曲柄AB为主动件,作出摇杆CD的极限位置如图所示。
∴ AC 1=l AB +l BC =40+25=65AC 2=l BC -l AB =40-25=15(1)极位夹角θ:出现在AB 与连杆BC 重合位置222222112212arccos arccos 22AC AD C D AC AD C D AC AD AC ADθ+-+-=-⨯⨯⨯⨯222222655550155550arccos arccos265552155514.6+-+-=-⨯⨯⨯⨯=图1行程速比系数K=(1800+θ)/(1800-θ)≈1.17(2)求摇杆的最大摆角φ,从图1,摇杆的最大摆角φ: φ=∠B 1DC 1-∠B 2DC 2222222112212222222arccos arccos22505565505515250552505560.83C D AD AC C D AD AC AD C D AD C D +-+-=-⨯⨯⨯⨯+-+-=-⨯⨯⨯⨯=(3)最小传动角γmin 出现在AB与机架AD重合位置(分正向重合、反向重合)如图2。
分别求出1δ、2δ,再求最小传动角。
2221()arccos 2BC CD AD AB BC CDδ+--=⨯⨯2224050(5525)arccos2405036.86+--=⨯⨯= 2222()arccos 2BC CD AD AB BC CDδ+-+=⨯⨯2224050(5525)arccos 24050125.09+-+=⨯⨯=图2曲柄处于AB1位置时,传动角γ1=1δ=36.860.曲柄处于AB2位置时,传动角γ2=1800-2δ=54.900. 现比较的γ1、γ2大小,最小传动角取γ1、γ2中最小者. ∴γmin =36.8602) 取AB为机架,即取最短杆为机架,该机构演化为双曲柄机构。
因为在曲柄摇杆机构中取最短杆作为机架,其2个连架杆与机架相连的运动副A、B均为周转副。
C、D两个转动副为摆转副。
3-15 图3-59所示为加热炉炉门的启闭状态,试设计一机构,使炉门能占有图示的两个位置。
图3-59 题3-15图提示:把门看着是在连杆上,即两个活动铰链中心在门上,同时把固定铰链中心装在炉子的外壁上。
3-16试设计一个如图3-60所示的平面铰链四杆机构。
设已知其摇杆0B B 的长度075B B l mm =,行程速比系数K=1.5,机架00A B 的长度00100A B l mm =,又知摇杆的一个极限位置与机架间的夹角45ϕ=,试求其曲柄的长度0A A l 和连杆的长度AB l 。
图3-60 题3-16图解:(符号与课本不太一致)当行程速比系数K=1.5时,机构的极位夹角为︒=+-︒=+-︒=3615.115.118011180K K θ即机构具有急回特性,过固定铰链点A作一条与已知直线1AC 成︒36的直线再与活动铰链点C的轨迹圆相交,交点就是活动铰链点C的另一个极限位置。
选定比例尺,作图,如下图所示。
由图可知,有两个交点,即有两组解。
直接由图中量取84.701=AC ,75.252=AC ,88.1692='AC 。
故有两组解。
解一:构件AB 的长为mm AC AC l AB 55.22275.2584.70221=-=-= 构件BC 的长为mm AC AC l BC 3.48275.2584.70221=+=+= 摇杆的摆角︒=41ψ︒451C DAψ'θψ'2C 2C 2B 1B '2B '1B )(b解二:构件AB 的长为mm AC AC l AB52.49284.7088.169212=-=-'=构件BC 的长为mm AC AC l BC36.120284.7088.169212=+=+'=摇杆的摆角︒='107ψ3-17 如图3-61所示,设已知破碎机的行程速比系数K =1.2,颚板长度300CD l =mm ,颚板摆角ϕ=35º,曲柄长度l AB =80 mm 。