板材打孔机-机械原理课程设计完整版
- 格式:doc
- 大小:130.00 KB
- 文档页数:8
湘潭大学兴湘学院专业课程设计说明书题目小型孔打孔机的设计专业机械设计制造及其自动化班级学号姓名指导教师完成日期 2017年 1 月 12日摘要小型打孔机,包括机壳、电机座、电机导轨和两个压杆,所述机壳内具有推块,机壳的顶部具有螺母,螺杆的一端通过螺母穿过机壳的顶部与推块相连,电机导轨与机壳固定连接,电机座通过电机导轨与机壳滑动连接,电机座内具有电机,电机的输出端连接有动力头;所述推块的下端具有滚轮,推块的中部两侧对称开有向上的两个斜槽,每个压杆的一端装有导向轮,导向轮在斜槽内滑动,每个压杆的中部通过回转销与机壳转动连接,每个压杆的另一端也均装有滚轮。
本实用新型的打孔机,不仅能快速的夹紧工件,三点快速夹紧,自动定心,实现自动打孔的目的。
中、长圆钢工件,加工时圆跳动大,一般须预先钻好中心孔后,再用顶尖定位一端进行车削加工。
本设计的目的在于设计一种专用的中心孔钻孔设备,可方便地对圆钢工件进行中心孔钻孔操作。
关键字:钻孔;定位;带传动;花键传动AbstractCenter punch, including chassis, motor, rail, and two compressive bar inside the casing has stated push block, the top of the chassis with a nut, one end of the screw nut, through the top of the chassis and blocks are linked together, motor guide rail and the casing is fixed, the motor seat by machine guide rail and slide casing connection, motor seat is, the output of the motor connection power head; As described in the lower end of the block with a roller, block in the middle of the bilateral symmetry runs up two chute, each one end of the push rod is equipped with guide wheel, guide wheel sliding inside the chute, each lever through back to resellers and chassis rotation connection, in the middle of each lever and on the other side of the roller. Center punching machine of the utility model not only can fast clamping workpiece, three fast clamping, automatic centering, the purpose of realizing automatic centering.Round beat, in the long round steel workpiece, processing, generally after good center hole drill in advance, then using top positioning end cutting processing. The purpose of this design is to design a special center hole drilling equipment, easily on round steel workpiece center hole drilling operation.Key words:Center hole;Center positioning;Tape drive;Spline drive目录一.引言二.总体设计方案确定及动力元件选择三.系统能量设计,电动机的选择四.传动装置的总传动比和分配传动比,动力参数五.V带传动的设计计算5.1确定计算功率5.2选择V带的带型5.3验算带速v5.4计算大带轮直径L5.5确定中心距a,并选择V带的基准长度d5.6验算小带轮上的包角a15.7计算带的根数zF5.8确定单根V带得初拉力F5.9计算带传动的压轴力p六.带轮材料及结构七.轴的设计8.1带轮传动轴的设计和校核八.整体三维建模九.结束语十.参考文献一、引言打孔机简介打孔机械广泛应用与桥梁建筑、道路施工等诸多领域。
目录设计任务书一、设计题目及原始数据设计加工所示工件ф12mm孔的半自动钻床。
进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构使被加工工件可靠固定。
二、设计要求及方案提示要求设计该半自动钻床的送料、定位、及进刀的整体传动系统。
其中:1.钻头由动力头驱动,设计者只需考虑动力头的进刀(升降)运动。
2. 除动力头升降机构外,还需要设计送料机构、定位机构。
各机构运动循环要求见下表。
3. 可采用凸轮轴的方法分配协调各机构运动。
机构运动循环要求表三、设计任务1.半自动钻床至少包括凸轮机构、齿轮机构在内的三种机构;2.设计传动系统并确定其传动比分配,并在图纸上画出传动系统图;3. 图纸上画出半自动钻床的机构运动方案简图和运动循环图;4.凸轮机构的设计计算。
按各凸轮机构的工作要求,自选从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。
对盘状凸轮要用电算法计算出理论廓线、实际廓线值。
画出从动件运动规律线图及凸轮廓线图;5.设计计算其他机构;6.编写设计计算说明书;一、所设计的机构工作原理一.机构的工作原理:该系统由电机驱动,通过变速传动将电机的1450rmin降到主轴的2rmin,与传动轴相连的各机构控制送料,定位,和进刀等工艺动作,最后由凸轮机通过齿轮传动带动齿条上下平稳地运动,这样动力头也就能带动刀具平稳地上下移动从而保证了较高的加工质量,具体的选择原理和工作原理如下:二.机的选择原理(1)原动机的分类原动机的种类按其输入能量的不同可以分为两类:A一次原动机此类原动机是把自然界的能源直接转变为机械能,因此称为一次原动机。
属于此类原动机的有柴油机,汽油机,汽轮机和燃汽机等。
B二次原动机此类原动机是将发电机等能机所产生的各种形态的能量转变为机械能,因此称为二次原动机。
属于此类原动机的有电动机,液压马达,气压马达,汽缸和液压缸等。
(2)选择原动机时需考虑的因素:1:考虑现场能源的供应情况。
机械原理课程设计说明书设计题目:半自动钻床专业机械设计制造及其自动化学号姓名蒋朝伟35王鹏伟36莫森34周海浩20张昊昉08班级机制131指导教师郁倩完成日期目录设计任务书 (1)1.工作原理分析 (4)2.功能分解及工艺动作 (4)功能分解图 (4)工艺动作 (5)3.原始数据及计算 (5)原始数据处理 (5)拟定运动循环图 (7)4.方案设计思路及讨论改进 (8)方案设计思路 (8)方案讨论改进 (10)5.执行机构的设计 (14)行星轮的计算 (14)送料机构分析 (16)动力头机构分析 (16)定位机构分析 (18)夹紧机构分析 (18)6.总机评价 (19)7.设计感想 (20)8.参考文献 (21)设计任务书见稿纸1.工作原理分析半自动钻床的工作原理是利用转头的旋转和进刀切削掉工件的余料而得到工件尺寸形状。
工艺动作过程由送料定位钻孔三部分组成。
各个机构的运动由同一电机驱动,运动由电动机经过减速装置后分为两路,一路随着传动传动皮带传送动力到定位机构和送料机构,分别带动凸轮做转动控制四杆机构对工件的定位和带动凸轮四杆机构控制推杆做往复直线运动。
另一路直接传动到钻头的进退刀机构,控制钻头的进退。
2、功能分解及工艺动作功能分解图如下工艺动作基本运动为:推杆的往复直线运动,定位机构的间歇运动和钻头的往复运动。
此外,还要满足传动性能要求:1 送料、定位、进刀机构在凸轮轴不同转角时候快慢行程不同。
2 各个机构之间的配合相互有序,满足凸轮轴转角对应的性能要求。
3、原始数据及计算原始数据处理根据任务书的要求,该机械的进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构与夹紧将加工工件可靠固定。
四个执行构件的运动形式为:(1)动力头完成往复(铅垂上下)直线运动,下移到最低点后立刻上移。
在下移前一段时间是快速趋近15mm,这段时间正好用于送料和定位。
动力头的行程是。
若机构主动作一转完成一个运动循环,则上冲头位移线图的形状大致如图3-1所示。
《机械原理课程设计》学院: 行知学院专业: 机械设计制造及其自动化姓名:陈宇学号: ********授课教师:王笑提交时间:2012 年7 月1日成绩:目录1.设计工作原理-----------------------------------------------------22.方案的分析--------------------------------------------------------43. 机构的参数设计几计算-----------------------------------------74. 机构运动总体方案图及循环图-------------------------------115.机构总体分析----------------------------------------------------136. 参考资料----------------------------------------------------------13半自动钻床机构一、设计工作原理1.1、工作原理及工艺动作过程该系统由电机驱动,通过变速传动将电机的1080r/min降到主轴的5r/min,与传动轴相连的各机构控制送料,定位,和进刀等工艺动作,最后由凸轮机通过齿轮传动带动齿条上下平稳地运动,这样动力头也就能带动刀具平稳地上下移动从而保证了较高的加工质量。
设计加工图(一)所示工件ф12mm孔的半自动钻床。
进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构使被加工工件可靠固定。
1.2、设计原始数据及设计要求半自动钻床设计数据参看表(一)表(一)半自动钻床凸轮设计数据要求设计该半自动钻床的送料、定位、及进刀的整体传动系统。
其中:1.钻头由动力头驱动,设计者只需考虑动力头的进刀(升降)运动。
2.除动力头升降机构外,还需要设计送料机构、定位夹紧机构。
各机构运动循环要求见下表(二)。
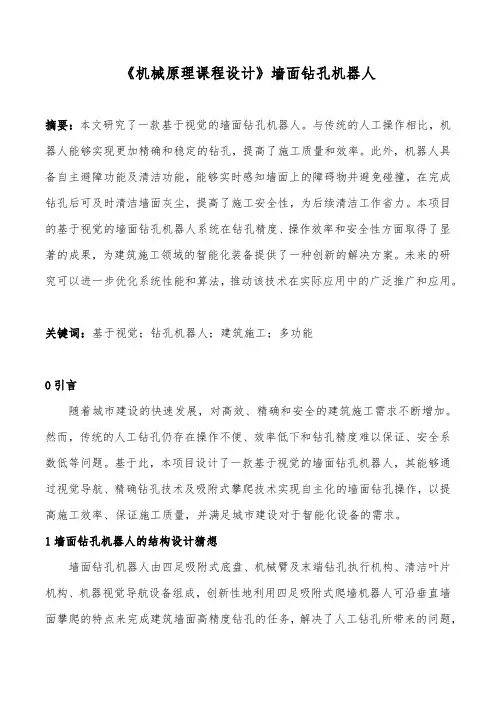
《机械原理课程设计》墙面钻孔机器人摘要:本文研究了一款基于视觉的墙面钻孔机器人。
与传统的人工操作相比,机器人能够实现更加精确和稳定的钻孔,提高了施工质量和效率。
此外,机器人具备自主避障功能及清洁功能,能够实时感知墙面上的障碍物并避免碰撞,在完成钻孔后可及时清洁墙面灰尘,提高了施工安全性,为后续清洁工作省力。
本项目的基于视觉的墙面钻孔机器人系统在钻孔精度、操作效率和安全性方面取得了显著的成果,为建筑施工领域的智能化装备提供了一种创新的解决方案。
未来的研究可以进一步优化系统性能和算法,推动该技术在实际应用中的广泛推广和应用。
关键词:基于视觉;钻孔机器人;建筑施工;多功能0引言随着城市建设的快速发展,对高效、精确和安全的建筑施工需求不断增加。
然而,传统的人工钻孔仍存在操作不便、效率低下和钻孔精度难以保证、安全系数低等问题。
基于此,本项目设计了一款基于视觉的墙面钻孔机器人,其能够通过视觉导航、精确钻孔技术及吸附式攀爬技术实现自主化的墙面钻孔操作,以提高施工效率、保证施工质量,并满足城市建设对于智能化设备的需求。
1墙面钻孔机器人的结构设计猜想墙面钻孔机器人由四足吸附式底盘、机械臂及末端钻孔执行机构、清洁叶片机构、机器视觉导航设备组成,创新性地利用四足吸附式爬墙机器人可沿垂直墙面攀爬的特点来完成建筑墙面高精度钻孔的任务,解决了人工钻孔所带来的问题,为建筑施工领域的智能化装备提供了一种创新的解决方案。
基于视觉的墙面钻孔主体为轻质合金制成的四足吸附式爬墙机器人,在此基础上对不同功能的机构进行协调叠加。
本作品的运行流程如下:钻孔机器人利用气泵,采用真空吸附的方式在垂直墙面上爬行至工作位置,通过机器视觉和智能算法将机械臂带动至指定位置使得钻头在需钻孔位置就位,根据预先设定的钻孔参数,机器人控制钻头的旋转和进给,完成钻孔过程。
同时,机器人可以通过视觉反馈实时监测钻孔的进展和精度,以便进行调整和纠正。
钻孔结束后,机械臂复位。
机械原理课程设计说明书题目半自动钻床学院机电工程学院专业及班级机械设计制造及其自动化13升本2班设计人XXX学号XX指导教师XX成绩2014 6,12——7,4目录一、设计题目 (1)1、设计题目 (1)2、原始数据及设计要求 (1)3、设计任务 (2)4、机构示意图 (2)二、运动方案设计 (3)1、工作原理和工艺动作分解 (3)2、机械执行机构的选择和评定 (4)3、根据工艺动作和协调要求拟定运动循环图 (6)4、机械传动系统的设计选择和评定 (7)三、执行机构尺寸设计 (8)1、执行机构各部分尺寸设计 (8)2、机构运动简图 (10)四、设计总结 (11)五、参考文献 (11)一、设计题目1、设计题目一:半自动钻床2、原始数据及设计要求:(1)设计原始数据表如下表所示:表1半自动钻床凸轮设计数据表2 机构运动循环要求(2)设计要求:半自动钻床一般至少包括凸轮机构、齿轮机构和连杆机构在内的三种机构;至少设计出三种能实现该分类机运动形式要求的机构,绘制所选机构的机构示意图(绘制在说明书上),比较其优缺点,并最终选出一个自己认为最合适的机构进行机构综合设计,绘制出其机构运动简图。
1.设计传动系统并确定其传动比分配(皮带传动传动比i≈2,每级齿轮传动传动比i≤7.5)。
2.在图纸上画出半自动钻床的传动系统方案图。
3、设计任务(1)本题设计的时间为3周;(2)根据功能要求,确定工作原理和工艺动作分解;(3)执行机构选型与设计:构思出至少3种运动方案,并在说明书中画出运动方案草图,经对所有运动方案进行分析比较后,选择其中你认为比较好的方案进行详细设计;(4)对选择的方案画出机构运动循环图;(5)机械传动系统的设计;(6)对选择的方案执行机构进行尺寸设计;(7)编写设计说明书,附源程序和计算结果。
4、半自动钻床示意图图1、半自动钻床示意图1、带轮2、有凹槽的圆柱凸轮3、夹紧凸轮4、进料凸轮5、进刀凸轮6、进刀机构连杆7、进刀齿轮(两齿轮相同)(A1,A2,A3,A4分别为各机构复位弹簧)二、运动方案设计1、工作原理和工艺动作分解(1)工作原理:半自动钻床的工作原理是利用钻头的旋转和进刀切削掉工件的余料而得到工件尺寸形状。
机械原理课程设计完整版一、教学目标本课程旨在让学生了解和掌握机械原理的基本概念、原理和应用,培养学生的创新意识和实践能力。
通过本课程的学习,学生应达到以下目标:1.知识目标:(1)了解机械系统的基本组成部分及其相互关系;(2)掌握机械原理的基本原理和定律;(3)熟悉机械设计的基本方法和步骤;(4)了解机械原理在工程实际中的应用。
2.技能目标:(1)能够运用机械原理解决实际问题;(2)具备简单的机械设计能力;(3)学会使用相关工具和软件进行机械设计。
3.情感态度价值观目标:(1)培养学生的团队合作意识和沟通能力;(2)增强学生对机械工程的兴趣和热情;(3)培养学生关注社会发展和科技进步的意识。
二、教学内容本课程的教学内容主要包括以下几个部分:1.机械原理概述:介绍机械系统的基本组成部分,如机械元件、机械结构、机械系统等,并分析它们之间的相互关系。
2.机械原理的基本原理和定律:讲解力学、动力学、热力学等基本原理,以及能量守恒、功的计算、摩擦力等基本定律。
3.机械设计的基本方法和步骤:介绍机械设计的方法和步骤,如设计原则、设计流程、设计规范等。
4.机械原理在工程实际中的应用:通过案例分析,使学生了解机械原理在工程实际中的应用,如机械传动、机械控制系统等。
三、教学方法为了提高教学效果,本课程将采用多种教学方法,如讲授法、讨论法、案例分析法、实验法等。
1.讲授法:通过教师的讲解,使学生掌握机械原理的基本概念、原理和应用。
2.讨论法:学生进行分组讨论,促进学生思考和交流,提高学生的理解能力。
3.案例分析法:通过分析实际案例,使学生了解机械原理在工程实际中的应用。
4.实验法:安排学生进行实验,培养学生动手能力和实践能力。
四、教学资源为了支持本课程的教学,我们将准备以下教学资源:1.教材:选用权威、实用的教材,为学生提供系统的学习资料。
2.参考书:提供相关的参考书籍,丰富学生的知识体系。
3.多媒体资料:制作精美的多媒体课件,提高学生的学习兴趣。
机械原理课程设计--半自动钻床
钻床是特殊机床之一,是用来加工孔,钻孔和攻丝孔及铰孔等,其中一些比较小的孔甚至只有几微米级别的精度要求,这就要求钻床的精度要求也是比较高的,因此钻床的精密性是一个重要的指标。
半自动钻床是传动系统、放行系统、升降系统、定位系统等工作台上所有有关部件的组合,这也是普通的钻床技术的延伸。
半自动的制造内部机构一般由主机、上放行部分和润滑柱组成,上放行部分由进给丝杆 2012、大小钻刀架、夹头、压印型、百分表、前后气阻杆组成,而主机部分包括润滑柱、主轴、蝶罩、主轴三穿轴组件等。
半自动钻床的制造首先将夹头固定在机床上,然后将进给丝杆 2012 安装在放行部分的主轴上,同时拆开百分表和前后气阻杆,安装在放行部分上。
随后,将尺度和夹头,压印型固定好,然后将润滑柱装入主轴,安装相应圆盘,最后将大小组合钻刀架安装在上部。
在使用前,需要根据工件材料和孔加工要求,进行钻刀端尺度、夹头、前后气阻杆等相应设置,根据实际情况调整孔加工位置,调整切削深度、进给量等,并检查所有紧固件的螺纹是否擦伤,如有擦伤要及时更换新的。
半自动钻床具有运行精度高、自动润滑、选择性缩减等优点,可靠性高,操作简单易学,能有效地提高工作效率,满足用户的加工需求。
半自动钻孔机课程设计一、课程目标知识目标:1. 学生能理解半自动钻孔机的基本结构、工作原理及功能。
2. 学生能掌握半自动钻孔机的操作步骤、安全使用规范及日常维护方法。
3. 学生了解半自动钻孔机在工业生产中的应用领域及其在现代制造业中的重要性。
技能目标:1. 学生能正确操作半自动钻孔机,完成给定材料的钻孔任务。
2. 学生具备分析和解决半自动钻孔机操作过程中遇到的一般性问题的能力。
3. 学生能运用所学知识,针对不同材料的特性,合理选择钻孔参数,提高加工效率。
情感态度价值观目标:1. 培养学生热爱劳动、爱护设备、注重生产安全的良好习惯。
2. 增强学生的团队协作意识,提高沟通与交流能力。
3. 激发学生对现代制造业的兴趣,培养创新精神和实践能力。
课程性质:本课程为专业技能课,以实践操作为主,理论教学为辅。
学生特点:学生具备一定的机械基础知识,动手能力强,对新鲜事物充满好奇心。
教学要求:结合学生特点,注重实践与理论相结合,强调操作规范与安全意识,提高学生的实际操作能力和问题解决能力。
在教学过程中,关注学生的个体差异,因材施教,确保每位学生都能达到课程目标。
通过课程学习,使学生能够将所学知识应用于实际工作中,为我国制造业发展贡献力量。
二、教学内容1. 半自动钻孔机的基本结构:讲解半自动钻孔机的主体结构、主要部件及其作用,如电机、传动系统、控制系统、钻头等。
相关教材章节:第二章第二节《半自动钻孔机的基本结构》2. 工作原理与功能:阐述半自动钻孔机的工作原理,介绍其钻孔、攻丝等主要功能。
相关教材章节:第二章第三节《半自动钻孔机的工作原理与功能》3. 操作步骤与安全规范:详细介绍半自动钻孔机的操作流程,强调安全操作规范,预防事故发生。
相关教材章节:第三章第一节《半自动钻孔机的操作步骤》4. 日常维护与保养:讲解半自动钻孔机的日常维护方法,培养学生养成良好的设备保养习惯。
相关教材章节:第三章第二节《半自动钻孔机的维护与保养》5. 钻孔参数选择与应用:分析不同材料的钻孔参数选择,提高加工效率和质量。
机械原理课程设计说明书学生姓名:学号:201141100系别:机械工程学院专业班级:机械设计制造及其自动化1班指导教师:教授起止时间:2013年12月23—27日东莞理工学院目录第一章内容介绍1-1 机构简介 (1)1-2 设计数据 (1)1-3 机构简图 (2)第二章六杆机构设计2-1 设计内容 (3)2-2 设计数据 (4)2-3 设计运动分析 (5)第三章凸轮设计3-1 设计内容 (7)3-2 图解法设计 (7)3-3 凸轮机构的计算机辅助设计 (10)第一章内容介绍1.机构简介压床是应用广泛的锻压设备,用于钢板矫直、压制零件等。
如图所示为某压床的运动示意图。
其中,六杆机构ABCDEF为其主体机构,电动机经联轴器带动减速器的三对齿轮(z l-z2, z3-z4, z5-z6)将转速降低,然后带动压床执行机构(六杆机构ABCDEF)的曲柄1转动,六杆机构使滑块5克服阻力F r而上下往复运动,实现冲压工艺。
为了减小主轴的速度波动,在曲轴A上装有飞轮,在曲柄轴的另一端装有供润滑连杆机构各运动副用的油泵凸轮。
2.设计数据: 设计数据见表1和表2。
表1 六杆机构的设计数据表2 凸轮机构的设计数据参数转角θ(度) 序号偏距e(mm)基圆半径r(mm)滚子半径rr(mm)行程h (mm)推程运动角δ( )远休止角01δ( )回程运动角'δ( )近休止角02δ( )0 1 19 37 10 60 10 30 150 30 120 602 20 38 10 40 10 35 140 60 90 703 21 39 10 30 10 60 140 0 150 7030 4 22 40 5 30 8 60 140 0 150 705 23 41 5 60 8 30 90 50 150 706 24 42 5 60 12 30 90 50 220 045 7 25 43 5 60 12 30 130 10 220 08 26 44 15 50 12 30 150 30 120 609 27 45 15 50 10 40 120 60 120 6060 10 28 46 15 50 10 40 180 0 180 011 29 47 10 45 10 40 180 0 180 012 30 48 10 45 6 50 120 90 90 6013 31 49 10 45 6 50 180 20 160 0(为一偏置直动滚子从动件盘形凸轮机构。
机械原理教案课程设计一、课程目标知识目标:1. 让学生理解并掌握机械原理基本概念,如力、运动、能量的相互关系。
2. 使学生了解常见简单机械的结构与工作原理,如杠杆、滑轮、齿轮等。
3. 帮助学生掌握机械效率的计算方法,并运用其分析实际机械系统的效率。
技能目标:1. 培养学生运用物理知识解决实际机械问题的能力。
2. 培养学生设计简单机械装置的能力,能结合实际需求进行创新设计。
3. 提高学生进行实验操作、数据采集和分析的能力。
情感态度价值观目标:1. 激发学生对机械原理的兴趣,培养其探究精神。
2. 培养学生合作学习、团队协作的意识,提高沟通表达能力。
3. 引导学生关注机械原理在生活中的应用,认识到科学技术对社会发展的作用。
分析课程性质、学生特点和教学要求:本课程为初中物理机械原理部分,以实验和理论相结合的方式进行教学。
学生处于好奇心强、动手能力逐渐提高的阶段,对机械原理有较高的兴趣。
教学要求注重理论与实践相结合,提高学生的动手能力和解决问题的能力。
二、教学内容1. 简单机械原理:介绍杠杆、滑轮、斜面等基本简单机械的定义、分类和工作原理。
关联课本第二章第一节内容。
2. 机械效率:讲解机械效率的概念,引导学生学会计算机械效率,分析影响机械效率的因素。
关联课本第二章第二节内容。
3. 动力与阻力:阐述动力、阻力的概念,分析二者在机械系统中的作用。
关联课本第二章第三节内容。
4. 能量转化与守恒:介绍能量在简单机械中的转化过程,强调能量守恒定律。
关联课本第二章第四节内容。
5. 创新设计:结合所学简单机械原理,指导学生进行简单机械装置的设计与制作。
关联课本第二章综合实践活动内容。
教学大纲安排:第一课时:简单机械原理(1)第二课时:简单机械原理(2)第三课时:机械效率第四课时:动力与阻力第五课时:能量转化与守恒第六课时:创新设计实践教学内容进度:第一周:简单机械原理(1)、(2)第二周:机械效率、动力与阻力第三周:能量转化与守恒、创新设计实践教学内容确保科学性和系统性,结合课本章节内容,循序渐进地引导学生掌握机械原理知识。
机械原理课程设计案例钻床一、课程目标知识目标:1. 理解钻床的基本机械原理,掌握其结构组成和工作原理;2. 掌握钻床运动学的基本概念,如直线运动、旋转运动及其相互转换;3. 掌握钻床的主要技术参数,如转速、进给速度、切削力等;4. 了解钻床的安全操作规程和日常维护保养方法。
技能目标:1. 能够分析并绘制钻床的简单结构图,进行基本的机械拆装和装配;2. 学会使用钻床进行金属材料的钻孔加工,掌握正确的操作步骤和加工技巧;3. 能够根据加工要求,合理选择钻头、转速、进给速度等参数,进行简单的工艺规划;4. 能够处理钻床操作过程中出现的常见问题,具备一定的故障排查和解决能力。
情感态度价值观目标:1. 培养学生对机械原理的兴趣,激发他们学习机械专业的热情;2. 培养学生严谨、细致的工作态度,提高他们安全意识,养成遵守操作规程的习惯;3. 培养学生的团队合作精神和沟通能力,使他们能够在实际工作中与他人协同合作,共同完成任务;4. 培养学生爱护设备、珍惜资源的意识,增强环保观念和社会责任感。
二、教学内容1. 钻床概述- 钻床的定义、分类及用途- 钻床的发展历程及现代钻床的特点2. 钻床的结构与工作原理- 钻床的主要组成部分及其功能- 钻床的工作原理及运动学分析- 钻床的传动系统及控制原理3. 钻床的主要技术参数与加工工艺- 钻床的技术参数及其影响- 钻头的分类、选用及安装- 钻孔加工的工艺过程及参数选择4. 钻床的操作与维护- 钻床的安全操作规程- 钻床的日常维护与保养- 常见故障分析与排除方法5. 实践教学环节- 钻床的拆装与装配实践- 钻孔加工操作实践- 钻床加工工艺规划与实施教学内容按照以上五个部分进行组织,结合教材相关章节,确保学生能够系统地掌握钻床的相关知识。
教学进度安排合理,注重理论与实践相结合,提高学生的实际操作能力。
三、教学方法1. 讲授法- 对于钻床的基本概念、结构组成、工作原理等理论知识,采用讲授法进行教学,使学生在短时间内系统地掌握相关知识;- 讲授过程中,注重条理清晰、深入浅出,结合实际案例分析,提高学生的理解能力。
机械原理课程设计模板内容一、课程目标知识目标:1. 理解并掌握基本的机械原理,如杠杆原理、轮轴原理、滑轮系统等。
2. 能够运用物理知识解释日常生活中的简单机械现象。
3. 掌握机械效率的计算方法,并能够分析影响机械效率的因素。
技能目标:1. 能够运用所学的机械原理设计简单的机械装置,解决实际问题。
2. 通过实验和观察,培养动手操作能力,提高实践技能。
3. 能够运用图表、计算和数据分析等方法,对机械效率进行评估。
情感态度价值观目标:1. 培养学生对机械原理的兴趣,激发探索精神和创新意识。
2. 增强团队合作意识,学会与他人共同解决问题。
3. 培养学生对自然科学的敬畏之心,认识到科学对生活的价值。
针对课程性质、学生特点和教学要求,本课程将目标分解为以下具体学习成果:1. 学生能够熟练运用机械原理知识,分析并解释生活中的机械现象。
2. 学生能够自主设计简单的机械装置,解决实际问题,并评估其效率。
3. 学生在团队合作中,能够积极参与、交流想法,共同完成任务。
4. 学生通过课程学习,培养对机械原理的热爱,增强对科学探究的兴趣。
二、教学内容本章节教学内容将围绕以下三个方面展开:1. 机械原理基础知识:- 杠杆原理:包括一等臂杠杆、二等臂杠杆和不等臂杠杆的特点与应用。
- 轮轴原理:介绍轮轴的基本概念、计算方法和实际应用。
- 滑轮系统:探讨滑轮系统的原理、类型以及其在工程中的应用。
2. 机械效率及其计算:- 机械效率的定义和计算公式。
- 影响机械效率的因素:分析摩擦力、机械重量和结构对效率的影响。
- 实际案例分析:通过实例计算和比较不同机械装置的效率。
3. 机械原理应用与实践:- 设计简单机械装置:运用所学知识设计实际可操作的机械装置。
- 实验教学:开展与教学内容相关的实验,观察和验证机械原理。
- 机械效率优化:探讨如何优化机械装置以提高效率。
教学内容按照以下教学大纲进行安排和进度:1. 第一周:介绍杠杆原理,分析不同类型的杠杆应用。
机械原理课程设计说明书题目:板材打孔机指导老师:学生姓名:学号:所属院系:机械工程学院专业:机械工程及自动化班级:机械083班完成日期:2010年7月12日机械工程学院2010年7月《机械原理课程设计》任务书班级: 姓名:课程设计题目: 板材打孔机课程设计完成内容:设计说明书一份(主要包括:运动方案设计、方案的决策与尺度综合、必要的机构运动分析和相关的机构运动简图)发题日期: 2010 年 6 月30 日完成日期: 2010 年7 月12 日指导教师:教研室主任:目录第1章设计任务书---------------------------------------------------------- 1 第2章设计方案选择-------------------------------------------------------- 22.1 设计方案一 ---------------------------------------------------- 22.2 设计方案二----------------------------------------------------- 22.3 设计方案三----------------------------------------------------- 32.4 最终选定方案--------------------------------------------------- 4 第3章所选定方案的具体设计------------------------------------------------ 53.1 尺寸设计计算--------------------------------------------------- 53.2 各机构速度、加速度曲线分析------------------------------------- 6 第4章所选运动各机构位移分析---------------------------------------------- 9 第5章总结---------------------------------------------------------------- 11 参考资料------------------------------------------------------------------- 12第1章设计任务书1.设计题目:板材打孔机2.工作原理及工艺动作过程:设计板材的打孔机构及其相配合的送料机构。
送料机构快速将坯料送至工作台,与此同时冲头以比较大的速度接坯料打孔,随后冲头近似匀速下行并将成品推出孔腔,最后快速返回。
冲头退出桌架后,送料机构将坯料送至待加工位置。
完成一个工作循环。
3.原始数据及设计要求:a) 动力源是作转动的或作直线往复运动的电机;b) 许用传动角为40度c) 生产率约每分钟70件d) 冲头的工作段长度L=30—100mm,对应曲柄转角为(1/3—1/2)∏e) 上模行程长度必须大于工作段长度两倍以上;f) 行程速度变化系数k>=1.5;g) 送料距离H=60—250mm。
4.要求完成的设计工作量a) 执行机构选型与设计:构思出至少3种运动方案,并在说明书中画出运动方案草图,经对所有运动方案进行分析比较后,选择其中你认为比较好的方案进行详细设计,该机构最好具有急回运动特性。
b) 传动系统的设计,齿轮机构、凸轮机构、连杆机构的设计,包括尺寸设计c) 用ADAMS软件对机构进行运动仿真d) 用ADAMS软件对机构进行运动学分析,并画出输出机构的位移、速度和加速度线图。
e) 画出最终方案的机构运动间图。
f) 撰写设计说明书。
1第2章设计方案选择2.1 设计方案一打孔机构采用六杆机构,可保证机构具有急回特性和工作段近于匀速的特征,并使压力角尽可能小。
用一般的四杆急回机构,虽可满足急回要求,但其工作行程的等速性能往往不好,采用六杆机构就可获得改善。
送料机构是由四杆机构组成,按机构的运动循环图确定主动件和从动件运动规律,则机构可在预定时间将工件送至待加工的位置。
图:2-1 设计方案一2.2 设计方案二打孔机构采用凸轮—连杆组合机构,这种组合机构的设计,关键在于根据输出的运动要求,设计出凸轮的轮廓。
可以根据打孔机构的运动过程,画出凸轮的轮廓。
凸轮轴通过齿轮机构与曲柄轴相连,可以按机构运动循环图确定凸轮转角及其从动件的运动规律,则可以控制打孔机构的运动。
送料机构是一个四杆机构,按机构运动循环图可确定主动件和从动件的运动规律,使其能在预定时间将工件送至待加工位置。
2图:2-2 设计方案二2.3 设计方案三打孔机构采用棘轮机构。
棘轮和一四杆机构串联,冲头上升时,摇杆顺时针摆动,并通过棘爪带动棘轮和工作抬顺时针转位。
当冲头下降进行冲压时,摇杆逆时针摆动,则棘爪在棘轮上滑动,工作台不动。
送料机构是一个四杆机构,按机构运动循环图可确定主动件和从动件的运动规律,使其能在预定时间将工件送至待加工位置。
图:2-3 设计方案三32.4 最终选定方案我最终采用的是第一方案。
原因:1. 六杆的机构的急回的性能相比较其他两种方案而言要好,而且六杆机构等速性能好,结构简单,能更好地符合设计的要求。
2. 凸轮虽然机构简单紧凑,但是凸轮轮廓与推杆之间为点、线接触,易磨损,凸轮机构多用于传力不大的场合。
3.棘轮工作时有较大的冲击和噪声,而且运动精度较差,棘轮一般用于速度较低和载荷不大的场合。
综合上述原因,我们觉得第一方案比其他两个方案更符合方案选用应考虑的几个方面,特别是第一方案的机构设计中结构相对其它方案非常简单,在制造中可以大大减少工序,并且可以降低成本。
图:2-4最终选定设计方案4第3章所选定方案的具体设计3.1、尺寸设计计算图:3-1-1 选定方案的尺寸设计取冲头工作段长度L=50mm ,行程长度S=250mm ,对应曲柄转角为60度。
连杆3长度L3=200mm ,连杆2左段长度为200mm ,最小传动角为45度。
当连杆2处于水平状态时,连杆3与冲头夹角为最小传动角,即45度。
则连杆2铰支点与冲头水平距离为341mm 。
取连杆2右段长度为300mm ,曲柄1铰支点与连杆2铰支点水平距离为100mm ,竖直距离为200mm 。
经测量计算,曲柄1长度为105mm ,连杆1长度为245mm 。
经测量,极位角为55度,行程速度比为(180+55)/(180-55)=1.88。
5图:3-1-2 选定方案的齿轮尺寸设计取送料距离H=200mm 。
曲柄2铰支点与曲柄1铰支点竖直距离为136mm,曲柄2铰支点与冲头水平距离为400mm。
经测量,齿轮1与齿轮2中心距为141mm,则两齿轮分度圆直径均为70mm。
取模数m=2,齿数z=35。
经测量计算,曲柄2长度为80mm,连杆4长度为250mm。
极位夹角为30度,行程速度比为(180+30)/(180-30)=1.4。
3.2 各机构速度、加速度曲线分析61).冲头速度图表2).冲头加速度图表73).送料机构速度图表4).送料机构加速度图表8第4章所选运动各机构位移分析1)冲头位移图表2)送料机构位移图表9设计总图10第5章总结这次课程设计,我感触颇深。
在设计的过程中,我往往在自认为已经没有问题的时候,却碰到了前面认为不是问题的问题。
看起来很简单的机械构件做起来却不是很容易。
设计起来也不是得心应手。
总结起来,我最大的欠缺就是缺乏一个整体的观念,常常在不经意中,以偏概全,以局部代替整体。
另外,在课程的设计中,我运用了ADAMS,AutoCAD等软件,对这些软件的运用有了更深刻的认识,运用得更加灵活自如。
这次课程设计是对机械原理这门课的总结,我运用这学期学到的关于机械原理的知识,充分发挥我的想象和创造能力,做出了我的机构。
虽然比较粗糙,但我相信,随着我知识的提升,我会做得更加完善。
我通过设计,了解到学习的内容的目的,运用,带着问题和明确的学习目的来学习,可以达到更好的效果。
这次课程设计,不仅显示了我对所学知识的运用情况,还培养了我的动手,思考和自主查阅资料的能力。
同时也暴露了自己知识的漏洞和不足。
但是经过老师的指导和自己的努力终于有了一定的成果,我想这在我以后的工作会有深远的影响。
11参考文献[1] 《机械原理设计指导书》主编:穆塔里夫新疆大学机械设计教研室 2009[2] 《机械设计》第七版主编:濮良贵纪名刚高等教育出版社出版 2001[3] 《机械原理》第七版主编:孙恒陈作模葛文杰高等教育出版社 2006[4] 《机械原理课程设计指导书》主编:裘建新高等教育出版社 2005[5] 《机械设计》主编:徐锦康机械工业出版社 2008[6] 《机械原理与设计课程设计》主编:王三民机械工业出版社 2004[7] 《机械原理课程设计手册》主编:邹慧君高等教育出版社 1998[8]《机械设计课程设计》第二版主编: 朱文坚黄平华南理工大学出版社出版 2004[9] 《ADAMS-虚拟样机技术入门与提高》主编:郑建荣北京机械工业出版社200112。