弱磁控制方案
- 格式:pdf
- 大小:1.07 MB
- 文档页数:5
永磁同步电机弱磁控制原理永磁同步电机是一种高效、高性能的电机,具有高转矩密度、高效率、高精度等优点,因此在工业生产中得到了广泛应用。
然而,永磁同步电机在运行过程中,由于磁场的不稳定性,容易出现磁场失稳、转速波动等问题,影响了电机的性能和稳定性。
为了解决这些问题,人们提出了弱磁控制原理,通过控制电机的磁场,使其保持稳定,从而提高电机的性能和稳定性。
弱磁控制原理是指在永磁同步电机运行过程中,通过控制电机的磁场,使其保持在一定的范围内,从而保证电机的性能和稳定性。
具体来说,弱磁控制原理包括两个方面:一是控制电机的磁场强度,二是控制电机的转速。
控制电机的磁场强度是弱磁控制原理的核心。
在永磁同步电机中,磁场的强度直接影响电机的性能和稳定性。
如果磁场过强或过弱,都会导致电机的性能下降或者失稳。
因此,弱磁控制原理要求控制电机的磁场强度在一定的范围内,既不能过强,也不能过弱。
具体来说,可以通过控制电机的电流来控制磁场的强度。
当电机的电流过大时,磁场会过强,导致电机失稳;当电流过小时,磁场会过弱,导致电机性能下降。
因此,弱磁控制原理要求控制电机的电流在一定的范围内,从而控制磁场的强度。
控制电机的转速也是弱磁控制原理的重要方面。
在永磁同步电机中,转速的稳定性直接影响电机的性能和稳定性。
如果转速波动过大,会导致电机的性能下降或者失稳。
因此,弱磁控制原理要求控制电机的转速在一定的范围内,既不能过快,也不能过慢。
具体来说,可以通过控制电机的电流和电压来控制转速的稳定性。
当电机的电流和电压过大时,转速会过快,导致电机失稳;当电流和电压过小时,转速会过慢,导致电机性能下降。
因此,弱磁控制原理要求控制电机的电流和电压在一定的范围内,从而控制转速的稳定性。
弱磁控制原理是一种有效的控制永磁同步电机的方法,可以提高电机的性能和稳定性。
在实际应用中,可以通过控制电机的电流和电压来控制磁场的强度和转速的稳定性,从而实现弱磁控制。
同时,还可以采用先进的控制算法和控制器,提高电机的控制精度和稳定性,进一步提高电机的性能和稳定性。
电动车弱磁方法是一种解决电动车控制器故障的常用方法。
当电动车控制器发生故障时,会导致电动车无法正常行驶,这时可以采用弱磁方法进行解决。
具体步骤如下:
1.将电动车电源关闭,用万用表测试控制器的A/D转换器的输出电压。
2.检查控制器与电动车电机之间的线路和接线,确保线路和接线正确无误。
3.使用一个电钻电池将一个电极连接到电动车电机的A相和B相之间,将另一个电极接地。
4.在测试过程中,将电源重新接通,然后在控制器输出电压开始增加之前快速转动电机轮辋。
5.在控制器输出电压稳定之前,继续转动电机轮辋,并使用万用表测试控制器输出电压的变化情况。
6.如果控制器输出电压有所变化,则说明控制器存在故障,需要进行维修或更换控制器。
7.如果控制器输出电压没有变化,则说明电动车的电机、电池等其他部件存在故障,需要进一步检查并进行修理。
需要注意的是,弱磁方法虽然可以帮助检测电动车控制器故障,但对电动车电机和电池等其他部件也可能造成一定的损伤,因此需要谨慎使用。
同时,如果不熟悉电动车的维修和调试,建议寻求专业技术人员的帮助。
电流角度法的弱磁控制算法全文共四篇示例,供读者参考第一篇示例:电流角度法是一种用于控制弱磁系统的有效算法,它是通过改变电流的角度来实现系统的稳定控制。
在众多控制算法中,电流角度法因其简单易实现且具有较高稳定性而备受青睐。
本文将详细介绍电流角度法的基本原理和应用范围,以及在弱磁系统控制中的作用和优势。
电流角度法的基本原理是通过改变电流的相位角度来控制系统的输出。
在传统的磁场控制中,通常是通过改变电流的幅值来控制系统的磁场强度。
在一些弱磁系统中,改变电流的幅值可能会引起系统的不稳定性,因此采用电流角度法可以更好地解决这一问题。
通过改变电流的相位角度,可以实现在保持电流幅值恒定的情况下调节系统的输出,从而实现对弱磁系统的有效控制。
在实际应用中,电流角度法主要用于控制弱磁系统的运动驱动,如步进电机、直流电机等。
通过改变电流的相位角度,可以实现对电机转速和转向的控制,从而实现对整个系统的灵活控制。
与传统的电流控制相比,电流角度法具有更高的控制精度和稳定性,可以更好地满足弱磁系统对控制精度和稳定性的要求。
第二篇示例:电流角度法是一种弱磁控制算法,主要用于控制电机在低速转动时的准确性和稳定性。
这种算法通过测量电机电流的角度来决定电机的位置和速度,从而实现精确的控制。
在这篇文章中,我们将介绍电流角度法的工作原理、优缺点以及在实际应用中的效果。
一、电流角度法的工作原理电流角度法是一种基于电流测量的算法,它通过测量电机的电流角度来确定电机的位置和速度。
在电机运行时,电流会随着转子的位置和速度变化而发生变化。
通过测量电流的角度,可以得知电机的准确位置,从而实现精确的控制。
优点:1. 精确性高:电流角度法可以通过测量电流的相位差实现精确的位置和速度控制。
2. 稳定性好:通过电流角度法可以实现稳定的电机运行,减少振动和噪音。
3. 可靠性高:电流角度法可以在低速转动时实现准确的控制,适用范围广。
缺点:1. 复杂性高:电流角度法需要复杂的电路和算法支持,实现起来比较困难。
三相永磁电机伺服系统弱磁控制方法的研究摘要:随着现代工业的发展,永磁电机在伺服系统中得到了广泛应用。
然而,由于永磁电机在运行过程中可能会出现磁场弱化的现象,这对于伺服系统的稳定性和性能提出了挑战。
本文通过研究三相永磁电机伺服系统的弱磁控制方法,旨在提高系统的稳定性和响应速度。
关键词:三相永磁电机;伺服系统;弱磁控制;稳定性;响应速度一、引言永磁电机作为一种高效、节能、体积小的电机,广泛应用于伺服系统中。
然而,在运行过程中,由于各种因素的影响,永磁电机的磁场可能会发生弱化,导致系统性能下降。
因此,研究三相永磁电机伺服系统的弱磁控制方法具有重要意义。
二、弱磁控制方法1. 磁场观测补偿法:通过传感器对永磁电机磁场进行实时观测,当发现磁场弱化时,通过增加控制器的输出电流来补偿磁场,以维持系统的性能。
这种方法可以有效提高系统的稳定性,但对传感器的要求较高。
2. 电流反馈补偿法:通过测量电机的相电流,通过控制器重新计算输出电流,以补偿磁场的弱化。
这种方法不需要额外的传感器,成本较低,但需要较高的精度来保证补偿效果。
3. 磁场观测与电流反馈相结合法:将磁场观测补偿法和电流反馈补偿法相结合,综合利用两种方法的优点,以达到更好的弱磁控制效果。
三、实验结果与讨论通过对比实验,我们可以发现,采用磁场观测与电流反馈相结合的方法,可以显著提高系统的稳定性和响应速度。
实验结果表明,当永磁电机磁场发生弱化时,系统能够快速响应并进行补偿,保持良好的控制性能。
同时,该方法对于传感器的要求较低,降低了系统的成本。
四、结论本文研究了三相永磁电机伺服系统的弱磁控制方法,并进行了实验验证。
结果表明,采用磁场观测与电流反馈相结合的方法可以有效提高系统的稳定性和响应速度。
这对于永磁电机伺服系统的应用具有重要意义,可以提高系统的控制性能,提升工业生产效率。
永磁同步电机弱磁控制的控制策略研究摘要永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。
基于它的优越性,永磁同步电机获得了广泛的研究和应用。
本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。
关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机一、永磁同步电机弱磁控制研究现状1.永磁同步电机及其控制技术的发展任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。
直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。
因此,交流电机的转矩控制性能不佳。
经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。
1.1 矢量控制1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统.矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能.1.2 恒压频比控制恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。
但是它依据电机的稳态模型,从而得不到理想的动态控制性能。
要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。
永磁同步电机的弱磁控制方法
永磁同步电机的弱磁控制方法主要是通过改变电机的定子电压来实现。
具体的方法包括:
1. 降低定子电压:降低定子电压可以减少磁场的强度,从而实现弱磁控制。
可以通过调节主控制器的输出电压或者使用变压器等方式降低定子电压。
2. 改变定子电流相位:可以通过改变定子电流的相位来改变磁场的强度。
通过控制主控制器的开关方式,可以改变电流的相位,从而达到弱磁控制的目的。
3. 调节磁场励磁:可以通过调节电机的励磁电流来改变磁场的强度。
通过控制主控制器的励磁电流,可以实现弱磁控制。
4. 使用矢量控制方法:矢量控制方法是一种智能控制方法,可以通过控制电流和磁场的方向来实现弱磁控制。
通过计算电机的电流和磁场的方向,然后调节主控制器的输出,可以实现弱磁控制。
总的来说,弱磁控制方法主要是通过调节定子电压、定子电流相位、励磁电流或使用矢量控制方法来实现。
这些方法可以有效地控制永磁同步电机的磁场强度,从而实现弱磁运行。
foc弱磁控制方法
在FOC(磁场定向控制)框架中实现弱磁控制的方法主要是通过调整电流矢量的方式。
弱磁控制的主要目标是减小电机反电动势输出,从而达到提高电机运行转速的目的。
一种常见的方法是将d轴方向的电流分量设置为0,或者加入负电流来削弱转子磁场。
这种方法的关键在于利用电流产生的磁场与转子磁场之间的相互作用关系。
在矢量控制中,控制三相输入电流的大小和方向至关重要,特别是垂直于转子磁体轴方向的分量(d-q结构)。
垂直方向的电流分量产生的磁场与转子磁场正交,从而产生旋转力矩。
而平行于转子磁轴方向的电流分量则不会产生力矩,但可能会使电机产生多余的热量并加剧轴承的磨损。
因此,应尽量最小化这个电流分量。
总的来说,通过控制三相输入电压和电流,并精确知道转子的实时位置,FOC可以实现弱磁控制,从而提高电机的运行速度范围。
弱磁控制原理与控制方法个人总结
弱磁控制是一种磁控制方法,通过使磁场的强度降低到一个较低的程度,来实现对磁
性材料的控制。
弱磁控制的原理主要包括磁场强度控制和磁场方向控制两方面。
磁场强度控制是通过改变电源电压或电流来控制磁体产生的磁场强度。
当电流或电压
增加时,磁场强度也会相应增加;当电流或电压减小时,磁场强度也会相应减小。
因此,通过调整电源的电压或电流,可以控制磁场的强度。
磁场方向控制是通过改变电流的方向来控制磁体产生的磁场方向。
当电流方向改变时,磁场的方向也会相应改变。
因此,通过改变电流的方向,可以改变磁场的方向。
磁场强度和方向的控制方法有多种,其中较常见的方法包括电流控制、电压控制、PWM控制和闭环控制等。
电流控制是最常见的一种方法,通过调整电源电流的大小来控制磁场的强度。
通常使
用恒流源或可变电阻器来控制电流的大小。
电压控制是通过调整电源电压的大小来控制磁场的强度。
通常使用恒压源或可变电源
来控制电压的大小。
PWM(脉宽调制)控制是一种通过调整PWM信号的占空比来控制磁场的强度的方法。
通过改变PWM信号的占空比,可以改变电流或电压的平均值,从而控制磁场的强度。
闭环控制是一种通过反馈信号来调整控制器输出信号的方法。
通过测量磁场的强度或
磁感应强度,将其与设定值进行比较,然后利用控制器输出信号来调整电流或电压,
从而实现对磁场的控制。
总的来说,弱磁控制是一种通过调整磁场的强度和方向来实现对磁性材料的控制的方法。
通过不同的控制方法和控制策略,可以实现对磁场的精确、稳定的控制。
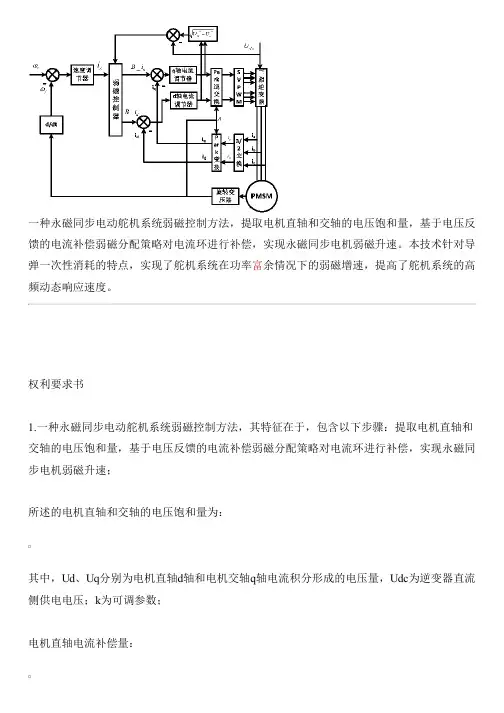
一种永磁同步电动舵机系统弱磁控制方法,提取电机直轴和交轴的电压饱和量,基于电压反馈的电流补偿弱磁分配策略对电流环进行补偿,实现永磁同步电机弱磁升速。
本技术针对导弹一次性消耗的特点,实现了舵机系统在功率富余情况下的弱磁增速,提高了舵机系统的高频动态响应速度。
权利要求书1.一种永磁同步电动舵机系统弱磁控制方法,其特征在于,包含以下步骤:提取电机直轴和交轴的电压饱和量,基于电压反馈的电流补偿弱磁分配策略对电流环进行补偿,实现永磁同步电机弱磁升速;所述的电机直轴和交轴的电压饱和量为:其中,Ud、Uq分别为电机直轴d轴和电机交轴q轴电流积分形成的电压量,Udc为逆变器直流侧供电电压;k为可调参数;电机直轴电流补偿量:电机交轴电流补偿量:其中,is为电机速度环输出的电流量。
技术说明书永磁同步电动舵机系统弱磁控制方法技术领域本技术涉及电动舵机伺服系统的电机控制技术领域,尤其涉及一种永磁同步电动舵机系统弱磁控制方法。
背景技术现如今战术武器电动舵机系统普遍采用直流电机、无刷直流电机作为执行机构,传统舵机用无刷直流电机系统位置-电流双闭环加“伪速度环”的控制方式。
传统的最大转矩电流比(id=0)控制方案,由于逆变器直流侧电压限制,存在积分饱和,当轻负载运行时电机转速最大为额定转速,功率有富余,对于弹用舵系统能源一次性消耗的特点来说,此时的富余功率是浪费的,无法最大限度利用弹上能源。
技术内容本技术提供一种永磁同步电动舵机系统弱磁控制方法,针对导弹一次性消耗的特点,实现了舵机系统在功率富余情况下的弱磁增速,提高了舵机系统的高频动态响应速度。
为了达到上述目的,本技术提供一种永磁同步电动舵机系统弱磁控制方法,包含以下步骤:提取电机直轴和交轴的电压饱和量,基于电压反馈的电流补偿弱磁分配策略对电流环进行补偿,实现永磁同步电机弱磁升速;所述的电机直轴和交轴的电压饱和量为:其中,Ud、Uq分别为电机直轴d轴和电机交轴q轴电流积分形成的电压量,Udc为逆变器直流侧供电电压;k为可调参数;电机直轴电流补偿量:电机交轴电流补偿量:其中,is为速度环输出的电流量。
简述弱磁控制原理的应用弱磁控制原理简介弱磁控制原理是指利用磁场对物体进行控制的一种原理。
在弱磁控制中,通常使用较弱的磁场以及磁性材料来实现对物体的操控。
该原理通过控制磁场的强度和方向,可以实现对物体的移动、定位、旋转等操作。
弱磁控制原理的应用弱磁控制原理在各个领域都有广泛的应用。
以下是一些常见的应用场景:•磁悬浮交通弱磁控制原理在磁悬浮交通中起到了重要的作用。
通过在列车和轨道上设置磁性材料,并利用弱磁场的吸引和排斥作用,可以实现对列车的悬浮和推动。
这种技术可以大大减少能量损耗,提高交通效率。
•电磁吸盘电磁吸盘是利用弱磁控制原理制造的设备,通过操控磁场的强度和方向,可以实现对吸盘上物体的精确吸附。
这种技术在工业生产中广泛应用,可以用于定位、固定和操控物体。
•磁性材料分离弱磁控制原理可以用于磁性材料的分离。
通过操控磁场的强弱和方向,可以将磁性材料分离出来,从而方便后续的处理和利用。
这种技术在矿石分离、废旧物品回收等领域有广泛的应用。
•磁性材料过滤利用弱磁控制原理,可以将磁性材料用于液体或气体的过滤。
通过在过滤器内设置磁性材料,可以有效地捕获其中的磁性颗粒,从而提高过滤效果。
这种技术在食品加工、环境保护等领域有着重要的应用。
•磁力传动弱磁控制原理可以被应用于磁力传动系统。
通过利用磁场的吸引和排斥作用,可以实现对传动装置的转动,从而实现机械传动。
这种技术在一些特殊环境下应用广泛,例如高温、高湿度和易燃易爆等场所。
•磁性材料治疗弱磁控制原理在医疗领域也有着广泛的应用。
通过操控磁场的强度和方向,可以对人体进行治疗和康复。
例如,磁性材料可以用于磁疗装置,帮助缓解疼痛,促进血液循环等。
总结弱磁控制原理是一种通过利用磁场对物体进行控制的原理。
它在磁悬浮交通、电磁吸盘、磁性材料分离、磁性材料过滤、磁力传动和磁性材料治疗等领域都有着广泛的应用。
弱磁控制技术的不断发展和创新将会为我们带来更多的便利和惊喜。
错误!未定义书签。
错误!未定义书签。
永磁同步电机弱磁控制方法摘要:永磁同步电机(Permanent magnet synchronous machine,PMSM)由于其高功率密度、高可靠性和高效率等特点,在电动汽车等要求较高的调速驱动系统中得到了广泛的应用。
永磁同步电机必须采用弱磁控制技术以满足宽转速范围的调速需求,对其进行弱磁控制并拓宽调速范围有着重要意义。
本文针对现在常用的几种永磁同步电机弱磁控制方法进行综述。
基于控制对象的不同,对弱磁控制方法进行分类,并详细介绍了目前比较常见的负id补偿法、查表法、梯度下降法、电流角度法、单电流调节器法等方法,分析了各方法的原理及特点,得出以电压为控制对象的弱磁方法具有一定发展前景的结论。
关键词:永磁同步电机;弱磁控制;内置式永磁同步电机;矢量控制The Field Weakening Control Strategy of Permanent MagnetSynchronous MotorAbstract:PMSM because of its high power density,high reliability and high efficiency characteristics,at a higher speed requirements of electric vehicle drive system has been widely used. PMSM weakening control technology must be used to meet the needs of a wide speed range 。
And because of its salient pole effect,it is of great significance to broaden the scope of the weak magnetic field of IPMSM. In this paper,the commonly used weakening control method of PMSM are reviewed.Based on the different control object,we classify the weak magnetic control method, and introduces in detail the negative id compensation method, look-up table method,gradient descent method,current angle method,single current regulator method that is used commonly at present,analyzes the principle and characteristics of each method.Finally, we conclude that voltage control field weeking method has development prospects 。
弱磁控制解决方案
一d、q轴数学模型
d-q轴系下表贴式同步电机电子方程为:
式中: 和分别为直轴和交轴同步电感,为定子相电阻,为转子的电角速度,为转子永磁体产生的励磁磁场的基波磁链。
电机高速稳定运行时,忽略定子压降,电压方程可以改写为,。
电动机定子电压大小为√,将上述等式带入得到
√。
根据定子绕组电压公式,当电机定子电压达到逆变器输出的极限电压时,为了使得转速升高,只能通过增加去磁电流分量
和减小交轴电流分量,以维持电压平衡,达到弱磁调速目的。
二安全限制问题
在弱磁高性能调速时,不同工作区域内,由于控制规律不同,为了获得较好的控制效果,通常会选择不同的电流、电压矢量轨迹或者转矩矢量轨迹。
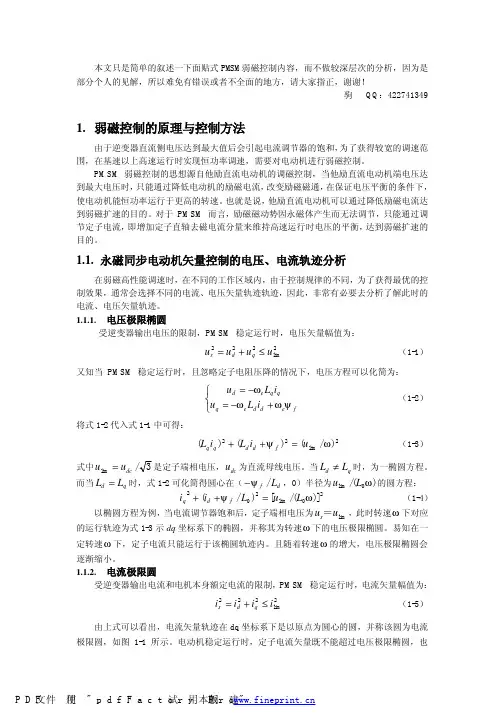
2.1 电压极限轨迹
受逆变器输出电压的限制,电机运行稳定时,电压矢量幅值为:
,又√,那么得到
⁄。
其中为逆变器两端的最大限制电压,当d、q两轴的电感相等时,电压极限轨迹是一个圆形曲线;否则,电压极限轨迹是一个椭圆曲线。
2.2 电流极限轨迹
受逆变器输出电流和电机本身额定电流的限制,PMSM稳定运行时,电流矢量幅值方程为:。
根据电流、电压极限方程得到轨迹图形为
电动机稳定运行时,定子电流矢量既不能超过电压极限圆也不能超过电流极限圆。
如果1时,电流矢量的范围限制在ABCDEF中。
三弱磁控制
3.1 弱磁控制方案一
*
主要控制流程:
电机控制进入弱磁控制模式后,保持电流矢量大小不变,通过调节超前角β大小,调节d、q两轴电流、,通过反馈调节确定电压极限圆限制。
通过反馈结果确定超前角β变化趋势。
弱磁控制主要面临的问题
1 进入弱磁控制状态,退出弱磁控制状态。
通常进入弱磁控制状态是电压或电流的调节达到了逆变器的饱和度。
以id=0的控制模式为例,调节q轴电流,确保定子两端电压值不超过Vmax。
当q轴电流达到设定的值,如果需要继续增加电机转速只能通过弱磁调节(保持电机硬件参数不变)。
首先保证电子两端电流大小i s不变,通过调节d、q两轴电流实现调节。
2 调节d、q两轴电流值
调节d、q两轴电流过程中应该保证有效电流大小i s恒定,满足关系式为
i s√i d i q。
假设超前角大小为β,有i d i s∗sinβ,i q i s∗cosβ,通过调节β实现d、q轴电流变化。
这样也不需要担心电流极限圆问题。
3 反馈
通过逆变器、电机获得数据包括电流大小i a、i b、i c,转子位置θ。
计算得到实际d、q两轴电流大小为i d、i q。
4 安全限制
根据d、q轴变换原理,主要包括电流极限圆、电压极限圆。
电流极限圆防止在d、q调节过程中,导致定子两端电流过大。
电压极限圆主要控制定子两端电压,防止电压达到逆变器所能提供的最大电压。
弱磁控制问题解决方法:
1 弱磁状态进入、退出
a 在进入弱磁控制前,采用id=0控制方法,此时超前角β0。
b 进入弱磁控制
在id=0控制模式下,当电机的转速w达到基速时,此时q轴电流大小与期望相电流i大小相等。
因此,进入弱磁控制主要条件有,id=0,iq=is且电机转速w不变。
注意:根据转速与电流之间关系,我们发现并不是每个电流大小下都适合进入弱磁控制模式。
并且在β角增大变化过程中,电机转矩肯定下降,因此需要限制β角大小,防止电机获得转矩不足以带动负载。
c 退出弱磁控制模式
目标相电流i的改变,因为新的需求产生,首先要进入id=0控制模式,使得电机转矩最大。
2调节d、q两轴电流值
进入弱磁控制后,根据电流极限圆原理,通过调节超前角β值,获得新d、q 轴电流调节目标,i d i s∗sinβ,i q i s∗cosβ。
不同β值,对应新的转矩、转速,然后通过反馈确定β到底增大或者减少。
3 电流反馈
电流反馈与原来的保持不变。
4 安全限制
由于在d、q轴电流调节过程中,采用了极限圆原理,因此,定子绕组电流可以忽略安全问题。
调节后的d、q两轴电压必须满足V V V。
如果发现对应的β角的d、q两轴电压值超过了允许的范围值,那么将β回滚到上次的值。
同样,β在调节过程中会影响到转子转矩大小,如果发现调节过程中,发现转子转速ψ持续减小,这说明转矩过小,同样将β回滚到上次大小。
对d轴电流调节过程中,有最大值 ax限制。
弱磁控制过程中的电流轨迹变化曲线
上图显示的调节方式,是在恒定功率情况下实现弱磁控制。
首先,在id=0控制模式下,使得电机转矩最大。
然后通过弱磁控制,提升电机转速。
弱磁控制过程中电机的转矩会减小,直到转矩与负载达到平衡后,弱磁调节过程结束,并维持电机当前控制状态。
3.2 弱磁控制方案二
*
主要思路:
电机控制进入弱磁控制模式后,保持q轴电流大小不变,保持电机恒定转矩。
通过调节d轴电流大小,实现弱磁扩速。
但是电源输出功率会增大,而且逆变器两端电流、电压值都会增大。
因此,需用通过安全设定,保证安全的电流调节。
在当前弱磁控制模式下,保持q轴电流大小不变,这样可以维持恒定的力矩大小。
通过调节d轴电流大小,增加电源输入功率,达到弱磁增速目的。
主要考虑问题进入、退出弱磁控制模式时机,调节d轴电流,安全限制。