第12章 轮系和减速器
- 格式:ppt
- 大小:1.70 MB
- 文档页数:69

浙江大学《机械设计基础》考研基本概念自测题三(判断题)第一部分基本概念自测题三、判断题(正确的在括号内填“√”,错误的填“某”)第一章总论1、构件是机械中独立制造单元。
()2、两构件通过点或线接触组成的运动副为低副。
()3、常见的平面运动副有回转副、移动副和滚滑副。
()4、运动副是两构件之间具有相对运动的联接。
()5、两构件用平面高副联接时相对约束为l。
()6、两构件用平面低副联接时相对自由度为1。
()7、机械运动简图是用来表示机械结构的简单图形。
()8、将构件用运动副联接成具有确定运动的机构的条件是自由度数为1。
()9、由于虚约束在计算机构自由度时应将其去掉,故设计机构时应尽量避免出现虚约束。
()10、有四个构件汇交,并有回转副存在则必定存在复合铰链。
()11、在同一个机构中,计算自由度时机架只有1个。
()12、在一个确定运动的机构中原动件只能有1个。
()13、刚度是指机件受载时抵抗塑性变形的能力。
()14、机件刚度准则可表述为弹性变形量不超过许用变形量。
()15、碳钢随着含碳量的增加,其可焊性越来越好。
()16、采用国家标准的机械零件的优点是可以外购,无需设计制造。
()17、钢制机件采用热处理办法来提高其刚度非常有效。
()18、使机件具有良好的工艺性,应合理选择毛坯,结构简单合理、规定适当的制造精度和表面粗糙度。
()第二章联接1、在机械制造中广泛采用的是右旋螺纹。
()2、三角形螺纹比梯形螺纹效率高、自锁性差。
()3、普通细牙螺纹比粗牙螺纹效率高、自锁性差。
()4、受相同横向工作载荷的联接采用铰制孔用螺栓联接通常直径比采用普通紧螺栓联接可小一些。
()5、铰制孔用螺栓联接的尺寸精度要求较高,不适合用于受轴向工作载荷的螺栓联接。
()6、双头螺柱联接不适用于被联接件厚度大、且需经常装拆的联接。
()7、螺纹联接需要防松是因为联接螺纹不符合自锁条件且≤v。
()8、松螺栓联接只宜承受静载荷。
()9、受静载拉伸螺栓的损坏多为螺纹部分的塑性变形和断裂,受变载拉伸螺栓的损坏多为栓杆部分有应力集中处的疲劳断裂。

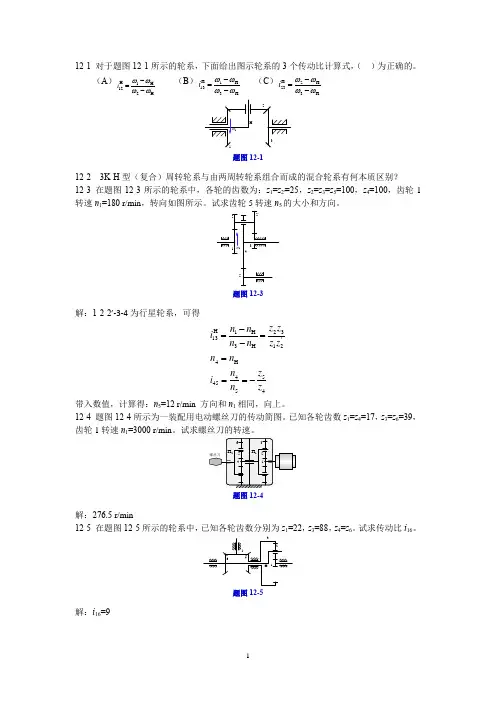
12-1 对于题图12-1所示的轮系,下面给出图示轮系的3个传动比计算式,( )为正确的。
(A )H 1H 122H i ωωωω-=-(B )H 1H 133H i ωωωω-=-(C )H 2H 233H i ωωωω-=-题图12-112-2 3K-H 型(复合)周转轮系与由两周转轮系组合而成的混合轮系有何本质区别?12-3 在题图12-3所示的轮系中,各轮的齿数为:z 1=z 2'=25,z 2=z 3=z 5=100,z 4=100,齿轮1转速n 1=180 r/min ,转向如图所示。
试求齿轮5转速n的大小和方向。
题图12-3解:1-2-2’-3-4为行星轮系,可得H 231H 13'3H 124H 544554z z n n i n n z z n n z n i n z -==-===-带入数值,计算得:n 5=12 r/min 方向和n 1相同,向上。
12-4 题图12-4所示为一装配用电动螺丝刀的传动简图。
已知各轮齿数z 1=z 4=17,z 3=z 6=39,齿轮1转速n 1=3000 r/min 。
试求螺丝刀的转速。
题图12-4解:276.5 r/min12-5 在题图12-5所示的轮系中,已知各轮齿数分别为z 1=22,z 3=88,z 4=z 6。
试求传动比i 16。
题图12-5解:i 16=912-6在题图12-6所示的轮系中,已知各轮齿数z1 =40,z2=z3=100,z4=z5=30,z6=20,z7=80,齿轮1转速n A=1000r/min,方向如图。
试求n B大小及方向。
解:n B=240 r/min 方向向上12-7 下题图12-7所示的轮系中,已知各齿轮的齿数分别为:z1 =80,z2=60,z2'=20,z3=40,z3'=20,z4= 30,z5=80。
轴A和轴B的转速分别为n A=50r/min,n B=60r/min,方向如图所示。


第 12 章轮系(一)教学要求1、掌握定轴轮系,周转轮系传动比的计算2、了解其他新型齿轮传动装置(二)教学的重点与难点1、定轴轮系转向判别2、转化机构法求解周转轮系传动比2、复合轮系的分析(三)教学内容12.1轮系的分类轮系:用一系列互相啮合的齿轮将主动轴和从动轴连接起来,这种多齿轮的传动装置称为轮系。
定轴轮系(普通轮系)周转轮系复合轮系定 +周(复杂轮系)周 +周12.2定轴轮系及其传动比计算一、传动比A ——输入轴B ——输出轴i AB W A n A W B n B二、定轴轮系的传动比计算i 15W1W2W3 W4Z 2 Z3 Z 4 Z5i12i23i3 4i4 5Z1Z 2 Z3 Z 4W2W3W4W5所有从动轮齿数的乘积∴ i15所有主动轮齿数的乘积三、输出轴转向的表示1、首末两轴平行,用“+”、“ -”表示。
Z——惰轮:不改变传动比的大小,但改变轮系的转向2、首末两轴不平行(将轮 5 擦掉)用箭头表示3、所有轴线都平行i W1( 1)m所有从动轮齿数的乘积W5所有主动轮齿数的乘积m——外啮合的次数12.3周转轮系的传动比计算一、周转轮系F 3 4 2 4 22差动轮系: F=2行星轮系: F=1(轮 3 固定)(F 3 3 2 3 2 1)二、周转轮系的构件行星轮行星架(系杆)、中心轮基本构件(轴线与主轴线重合而又承受外力矩的构件称基本构件)行星架绕之转动的轴线称为主轴线。
ZK-H ( K —中心轮; H —行量架; V —输出构件)还有其他: 3K , K-H-V三、周转轮系传动比的计算以差动轮系为例(反转法)-W H(绕 O H—主轴线)转化机构(定轴轮系)i13H W1H W1W H( 1)Z 3W H W3W H Z13举例:图示为一大传动比的减速器, Z 1=100, Z 2=101, Z 2'=100, Z 3=99 求:输入件 H 对输出件 1 的传动比 i H1解: 1, 3 中心轮2, 2'行星轮H行星架给整个机构( -W H)绕 OO 轴转动i13H W1WH( 1)2Z2Z3 W3W H Z1 Z2周转轮系传动比是计算出来的,而不是判断出来的。
机械设计基础课程设计减速器引言减速器(Reducer),又称为减速机、减速器、减速齿轮机构,是将高速运动的动力通过齿轮传动装置转换成低速高转矩的设备。
减速器广泛应用于工业生产中的传动装置,具有重要的作用。
本文将详细讨论机械设计基础课程设计中的减速器。
一、减速器的作用和原理减速器主要用于将电动机等高速运动装置的转速降低,同时增加转矩。
其作用在于匹配输入和输出的转速和扭矩,使机械装置达到最适合的工作状态。
•减速器的作用–降低输出速度:通过齿轮传动机构,将高速输入转动降低到所需要的输出速度,满足不同工作环境的要求。
–增加输出扭矩:通过齿轮传动的工作原理,能够增加输出扭矩,提供所需的动力。
–反向装置:通过减速器的设计,可以实现转向,使机械装置在不同的工况下反向运动。
•减速器的原理–齿轮传动原理:减速器主要通过齿轮的传动实现速度和扭矩的转换。
通过两个或多个齿轮的组合传动,可以实现不同的转速比。
一般来说,将大齿轮称为驱动轮,小齿轮称为从动轮。
当驱动轮转动时,从动轮相应地转动,但速度和扭矩会发生变化。
二、减速器的分类根据结构和用途的不同,减速器可以分为多种类型。
下面将详细介绍常见的几种减速器。
2.1 齿轮减速器齿轮减速器是应用最为广泛的减速器之一,其主要由齿轮、轴承、轴和外壳等组成。
根据齿轮的不同排列方式和传动原理,齿轮减速器又可以分为平行轴齿轮减速器、斜齿轮减速器、行星齿轮减速器等。
•平行轴齿轮减速器:工作原理是通过平行轴上的两个齿轮之间的啮合传动来实现速度和扭矩的转换。
广泛应用于各类机械设备。
•斜齿轮减速器:斜齿轮减速器的轴线与齿轮轮系的轴线相交,主要用于两轴不平行的情况,特别适用于转动方向需要改变的场合。
•行星齿轮减速器:行星齿轮减速器由太阳轮、行星轮和内齿轮组成,通过不同齿轮的啮合传动实现减速。
具有结构紧凑、扭矩大等优点,广泛应用于工业领域。
2.2 带传动的减速器带传动的减速器主要是通过皮带、链条等进行传动,将高速输入转动减速至低速输出。


第一部分基本概念自测题三、判断题(正确的在括号填“√”,错误的填“×”)第一章总论1、构件是机械中独立制造单元。
( )2、两构件通过点或线接触组成的运动副为低副。
( )3、常见的平面运动副有回转副、移动副和滚滑副。
( )4、运动副是两构件之间具有相对运动的联接。
( )5、两构件用平面高副联接时相对约束为l。
( )6、两构件用平面低副联接时相对自由度为1。
( )7、机械运动简图是用来表示机械结构的简单图形。
( )8、将构件用运动副联接成具有确定运动的机构的条件是自由度数为1。
( )9、由于虚约束在计算机构自由度时应将其去掉,故设计机构时应尽量避免出现虚约束。
( )10、有四个构件汇交,并有回转副存在则必定存在复合铰链。
( )11、在同一个机构中,计算自由度时机架只有1个。
( )12、在一个确定运动的机构中原动件只能有1个。
( )13、刚度是指机件受载时抵抗塑性变形的能力。
( )14、机件刚度准则可表述为弹性变形量不超过许用变形量。
( )15、碳钢随着含碳量的增加,其可焊性越来越好。
( )16、采用国家标准的机械零件的优点是可以外购,无需设计制造。
( )17、钢制机件采用热处理方法来提高其刚度非常有效。
( )18、使机件具有良好的工艺性,应合理选择毛坯,结构简单合理、规定适当的制造精度和表面粗糙度。
( )第二章联接1、在机械制造中广泛采用的是右旋螺纹。
( )2、三角形螺纹比梯形螺纹效率高、自锁性差。
( )3、普通细牙螺纹比粗牙螺纹效率高、自锁性差。
( )4、受相同横向工作载荷的联接采用铰制孔用螺栓联接通常直径比采用普通紧螺栓联接可小一些。
( )5、铰制孔用螺栓联接的尺寸精度要求较高,不适合用于受轴向工作载荷的螺栓联接。
( )6、双头螺柱联接不适用于被联接件厚度大、且需经常装拆的联接。
( )7、螺纹联接需要防松是因为联接螺纹不符合自锁条件且λ≤ρv。