第二章机器人的结构
- 格式:ppt
- 大小:21.46 MB
- 文档页数:53

机器人技术手册第一章机器人概述随着科技的飞速发展,机器人技术成为了人们生活中不可忽视的一部分。
机器人作为一种智能化的机械设备,可以执行各种任务,从工业生产到日常生活,甚至探索未知的太空领域。
本手册将为您介绍机器人技术的相关知识和应用。
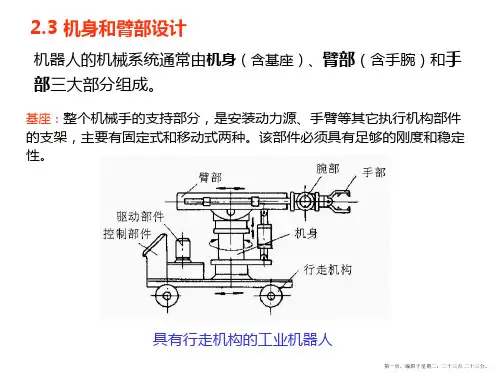
第二章机器人的组成和结构机器人由多个部件组成,包括机械结构、传感器、控制系统、电源等。
机械结构决定了机器人的形态和动作能力,传感器负责获取环境信息,控制系统则对机器人进行指令和决策。
第三章机器人的运动与定位机器人的运动是基于其机械结构和控制系统实现的。
常见的机器人运动包括步行、爬行、飞行等。
定位技术对机器人的导航和位置确定至关重要,主要采用的方法有GPS定位、惯性导航和视觉识别等。
第四章机器人的人机交互人机交互是机器人技术发展的一个重要方向,旨在让机器人能够更好地理解和响应人类指令。
语音识别、图像处理和自然语言处理等技术的应用,使得机器人能够实现智能对话和情感交流。
第五章机器人的应用领域机器人技术在各个领域都有广泛的应用。
在工业领域,机器人可以替代人力进行重复性或危险性的工作;在医疗领域,机器人可用于手术、康复和护理等;在军事领域,机器人可以执行侦查、救援和战斗任务。
第六章机器人的发展前景随着人工智能、大数据和云计算等技术的不断进步,机器人技术将会迎来更广阔的发展前景。
机器人的智能化和自主学习能力将大大提升其应用领域和工作效率。
结语机器人技术正在以惊人的速度改变着我们的生活和工作方式。
本手册致力于为读者提供机器人技术的相关知识和应用,希望能够对您的学习和工作有所帮助。
让我们共同期待机器人技术的未来!。
第二章机器人的机械结构机器人的机械结构是工业机器人的重要组成部分,它的结构在某方面与传统机械有相同之处,又不同于专用设备,它有自己的特点,具有较强的灵活性。
§2-1 手部结构简介工业机器人手部的特点:①手部与手腕相连处可拆卸。
手部与手腕有机械接口,也可能有电、气、液接头,当工业机器人作业对象不同时,可以方便的拆卸和更换手部。
②手部是工业机器人末端操作器。
可以像人手那样具有手指,也可以是不具备手指的手。
可以是类人的手抓,也可以是进行专业作业的工具,比如装在机器人手腕上的喷漆枪、焊接工具等。
③手部的通用性比较差。
工业机器人手部通常是专用的装置,比如:一种手爪往往只能抓握一种或几种在形状、尺寸、重量等方面相近似的工作;一种工具又能执行一种作业任务等。
④手部是一个独立的部件。
手部是工业机器人的关键部件之一,是用来抓取物件或握持工具的机构。
由于被握持工件的形状、尺寸、轻重、材质和表面状况不同,手部结构也是多种多样的,大部分都是根据特定件的要求而专门设计的。
各种手部的结构不仅形式不完全相同,而且工作原理也不一样,常用的手部,按握持原理,分为夹持和吸附式两大类。
夹持式:又称手指式,按夹持工件的部分不同,又可分为内撑式和外夹式两种。
吸附式:通常就是指吸盘式,多为气吸和磁吸两种。
外夹式平移式夹持式(手指式)原理形式分为内撑式回转式挤气式空气负压吸盘喷气式吸盘式真空式磁力吸盘一手指式手部手指式手部是由手指、传动机构和驱动装置三部分组成。
驱动装置:它是为传动机构提供动力,有液压、气动、电动三种形式。
传动机构:往往通过滑槽、斜楔、齿轮齿条、连杆等推动杠杆机构实现夹紧和松开动作。
手指:它对抓取各种形状的工件具有较大的适应性,可以抓取轴、盘、套类零件,一般情况下,多采用两个手指,少数为三指或多指。
结构形式取决于被夹持工作的形状和特征。
1 对手指式手部的基本要求:①手指握力(夹紧力)大小适宜。
为使手指能夹紧工件,并保证在运动过程中不脱落,要求手指在夹紧工作时应有足够的加紧力。
机器人实验报告总结
第一章:引言
机器人技术作为人工智能领域的核心之一,一直以来备受瞩目。
近年来,随着技术的不断进步,机器人在工业、医疗、家庭等领域的应用已经成为了不可或缺的存在。
本实验旨在通过对机器人的研究和探究,进一步了解机器人的构成、运作原理和应用场景。
第二章:机器人的构成
机器人的构成主要分为四个部分:机械部分、电子部分、传感器和控制单元。
其中机械部分包括机器人的外形和内部机械结构,包括机械臂、轮子、关节等;电子部分指机器人的电子设备,包括电路板、电机、传感器等;传感器是机器人的感知系统,包括视觉传感器、声音传感器、触觉传感器等;控制单元是机器人的大脑,它能够根据传感器所接收到的信息,对机器人的行为进行控制。
第三章:机器人的运作原理
机器人的运作原理主要分为两个部分:感知和决策。
感知是指机器人通过传感器接收外界环境的信息,包括视觉、声音、触觉等;而决策则是指机器人根据传感器接收到的信息,通过控制单元进行判断和决策,从而控制机器人的行动。
第四章:机器人在工业、医疗、家庭等领域的应用
机器人在工业、医疗、家庭等领域的应用广泛。
在工业领域,机器人可以代替人
工完成一些重复性劳动,提高生产效率;在医疗领域,机器人可以实现手术自动化、康复治疗等功能,提高治疗效果;在家庭领域,机器人可以帮助人们打扫卫生、照顾老人、保卫家庭等。
第五章:结论
通过本次实验,我们深入了解了机器人的构成、运作原理和应用场景。
机器人技术的发展将极大地推进社会的进步与发展。
未来,随着机器人技术的不断发展,机器人将在更多领域发挥出更大的作用。
机器人基础技术教学书机器人基础技术教学书第一章:机器人概述1.1 机器人的定义和分类1.2 机器人的发展历程1.3 机器人的应用领域第二章:机器人的机械结构2.1 机器人的基本结构和组成部件2.2 机器人的关节类型和运动方式2.3 机器人的传感器和执行器第三章:机器人的感知与认知3.1 机器人的感知技术3.1.1 视觉传感器3.1.2 声音传感器3.1.3 触觉传感器3.2 机器人的认知技术3.2.1 环境建模与感知分析3.2.2 机器人的自主导航与定位第四章:机器人的控制与决策4.1 机器人的控制系统4.1.1 开环控制与闭环控制4.1.2 反馈控制与前馈控制4.2 机器人的路径规划与运动控制4.3 机器人的决策与智能算法4.3.1 强化学习算法4.3.2 遗传算法4.3.3 模糊控制算法第五章:机器人的人机交互与协作5.1 机器人的语音识别和语音合成技术5.2 机器人的自然语言理解和生成技术5.3 机器人的姿态识别和情感分析技术5.4 机器人的协作与协同技术第六章:机器人的安全与伦理6.1 机器人的安全保障措施6.1.1 硬件安全:碰撞检测与防护装置6.1.2 软件安全:权限控制与隐私保护6.2 机器人的伦理问题与社会影响6.2.1 机器人的道德规范和法律法规6.2.2 机器人的就业和人类替代性第七章:机器人的未来发展与应用展望7.1 机器人技术的发展趋势7.2 机器人在工业制造领域的应用展望7.3 机器人在医疗卫生领域的应用展望7.4 机器人在农业和服务领域的应用展望结语:机器人基础技术的学习与应用通过本书的学习,读者将掌握机器人的基本概念和分类,了解机器人的机械结构和组成部件,熟悉机器人的感知与认知技术,了解机器人的控制与决策方法,掌握机器人的人机交互与协作技术,了解机器人的安全与伦理问题,并展望机器人技术的未来发展与应用前景。
通过学习,读者将能够在机器人相关领域进行研究和创新,为推动机器人技术的发展做出贡献。
库卡机器人使用手册第一章:机器人介绍库卡机器人是一款由德国公司KUKA开发的工业机器人,具有高精度、高效率和高灵活性的特点。
它可以广泛应用于各种工业领域,如汽车制造、电子产品生产、物流等。
库卡机器人拥有先进的控制系统和灵活的机械结构,可以完成各种复杂的操作任务,为企业提高生产效率和降低成本。
第二章:机器人结构1. 控制系统:库卡机器人采用先进的控制系统,可以实现高精度的运动控制和灵活的轨迹规划。
操作人员可以通过图形界面轻松地控制机器人的运动和任务执行。
2. 机械结构:库卡机器人采用轻量化的设计,具有高强度和高刚度,可以实现高速、高精度的运动。
机器人手臂可以实现多轴自由度的运动,灵活适应各种操作环境。
3. 传感器系统:库卡机器人配备了各种传感器系统,如视觉传感器、力传感器等,可以实现对环境和操作对象的感知和反馈,保证机器人的安全和稳定性。
第三章:机器人操作1. 启动与停止:按下启动按钮,机器人将进入工作状态;按下停止按钮,机器人将停止工作。
在启动前,需要确保机器人周围的安全区域没有人员和障碍物。
2. 示教操作:通过手动控制器或图形界面软件,可以对机器人进行示教操作,包括位置示教、轨迹示教等。
示教完成后,机器人可以自动执行任务。
3. 运动控制:可以通过手动控制器或图形界面软件实现对机器人的运动控制,如位置控制、速度控制、力控制等。
第四章:安全操作1. 安全防护:在启动机器人前,需要确保机器人的安全防护装置完好有效,以保证操作人员的安全。
2. 急停操作:在发生紧急情况时,可以按下急停按钮,立即停止机器人的运动。
在完成急停后,需要进行故障检查和复位操作。
3. 安全培训:使用库卡机器人需要接受相关的安全培训,了解机器人的操作规程和安全注意事项,避免发生意外事故。
第五章:维护保养1. 清洁保养:定期对机器人进行清洁和保养,包括清洁机械结构、检查电气连接、润滑轴承等,确保机器人的正常运行。
2. 故障排除:当机器人出现故障时,需要及时进行故障排除,包括检查传感器、诊断控制系统等。