一种快速夹紧装置的设计
- 格式:pdf
- 大小:485.45 KB
- 文档页数:3
基于伺服控制系统的夹紧装置设计在各类机械设备的工作过程中,夹紧装置是不可或缺的重要组成部分。
它能够确保工件的稳定夹持,为加工操作提供可靠的支撑。
然而,传统的夹紧装置在适应不同工件尺寸和形状方面存在一定的局限性。
为了克服这些问题,本文将基于伺服控制系统提出一种新型的夹紧装置设计。
一、概述本文设计的夹紧装置采用伺服控制系统,主要包括夹紧机构、传感器、执行机构和控制系统。
夹紧机构用于实现对工件的夹紧,传感器用于感知工件的尺寸和形状,执行机构用于根据传感器反馈信号调整夹紧力度,控制系统用于实现自动化控制。
二、夹紧机构设计夹紧机构是夹紧装置的核心部分,其设计应考虑工件的不同尺寸和形状。
本文提出采用可调节的夹爪设计,夹爪通过伺服电机控制运动,实现对工件的夹持。
三、传感器选择为了准确感知工件的尺寸和形状,本文选择了高精度的位移传感器。
传感器将安装在夹爪上方,用于检测夹爪与工件之间的距离和接触情况。
四、执行机构设计执行机构通过伺服电机控制夹爪的运动,实现对工件夹持力度的调整。
通过传感器反馈信号,控制系统可以根据工件的尺寸和形状要求,自动调整夹持力度,确保夹紧装置的稳定性。
五、控制系统设计控制系统是伺服控制系统的关键组成部分,它负责接收传感器的反馈信号,并根据工件的尺寸和形状要求,调节伺服电机的运动。
本文选择采用PID控制算法,通过对伺服电机的控制,实现夹紧力度的自动调整。
六、实验结果与分析为了验证本文设计的夹紧装置的性能,进行了一系列实验。
实验结果表明,该装置能够在不同尺寸和形状的工件上实现精确的夹紧,并且具有较高的工作稳定性和可靠性。
七、结论基于伺服控制系统的夹紧装置设计能够有效地克服传统夹紧装置在不同工件上的局限性。
通过传感器反馈和控制系统的自动调节,夹紧装置能够根据工件的尺寸和形状要求,实现精确的夹持力度控制。
该设计在工业生产中具有重要的应用价值。
总之,基于伺服控制系统的夹紧装置设计能够为机械制造行业提供更加灵活、高效的夹紧解决方案。
![一种快速夹紧装置[发明专利]](https://uimg.taocdn.com/b42c03e952ea551811a6871c.webp)
专利名称:一种快速夹紧装置
专利类型:发明专利
发明人:刘新宇,郭建东,黄晓光,田冀锋,胡怀伟,寇朝阳申请号:CN201010193349.3
申请日:20100607
公开号:CN101829972A
公开日:
20100915
专利内容由知识产权出版社提供
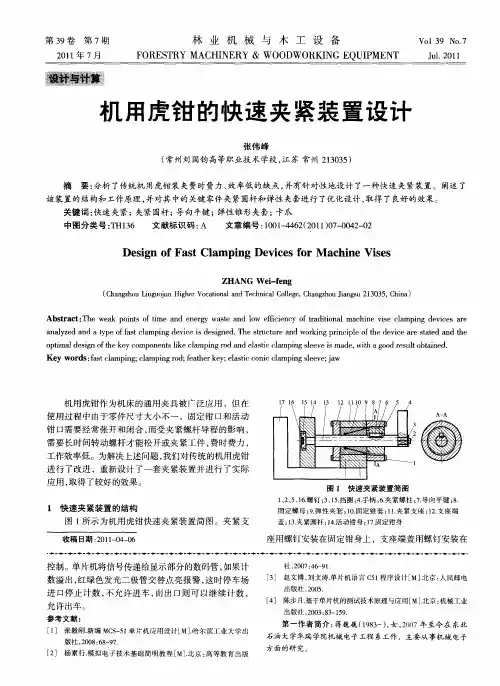
摘要:本发明公开了一种快速夹紧机构,包括压块、夹具体、夹紧螺杆、防转销、手柄、顶杆、弹簧、压盖、定位销,夹紧螺杆与夹具体为螺纹联结;夹紧螺杆右端安装手柄;顶杆与夹紧螺杆间为间隙配合;防转销是可以防止螺杆转动的,在夹紧螺杆上防转螺钉的另一侧装有防止顶杆后退的定位销,弹簧与压盖设置在防转销与定位销之间;在顶杆头部安装可摆动的光面压块或槽面压块。
本发明具有机构结构简单,尺寸、精度要求低;夹紧迅速、快捷;行程调节快速方便等特点。
申请人:中信戴卡轮毂制造股份有限公司
地址:066003 河北省秦皇岛市海港区东港路355号
国籍:CN
更多信息请下载全文后查看。