模糊控制原理_设计及应用_第7讲高级模糊控制器的设计
- 格式:pdf
- 大小:464.66 KB
- 文档页数:5

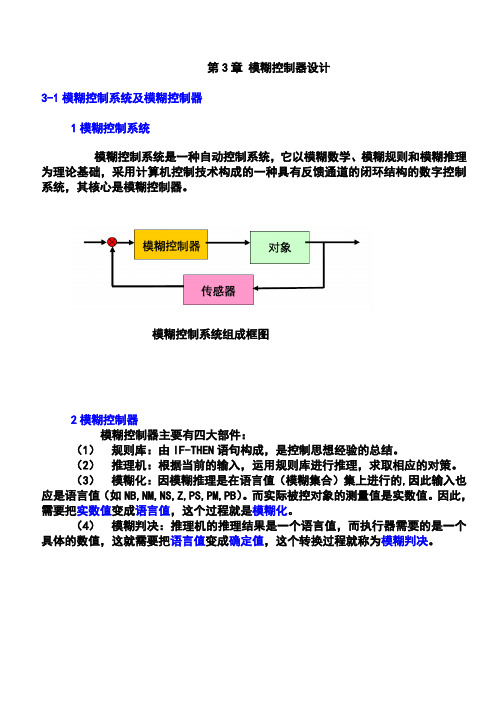
模糊控制理论模糊控制理论是以模糊数学为基础,用语言规则表示方法与先进的计算机技术,由模糊推理进行决策的一种高级控制策。
模糊控制作为以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,它已成为目前实现智能控制的一种重要而又有效的形式尤其是模糊控制与神经网络、遗传算法及混沌理论等新学科的融合,正在显示出其巨大的应用潜力。
实质上模糊控制是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。
本文简单介绍了模糊控制的概念及应用,详细介绍了模糊控制器的设计,其中包含模糊控制系统的原理、模糊控制器的分类及其设计元素。
“模糊”是人类感知万物,获取知识,思维推理,决策实施的重要特征。
“模糊”比“清晰”所拥有的信息容量更大,内涵更丰富,更符合客观世界。
模糊逻辑控制(Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量与模糊逻辑推理为基础的一种计算机数字控制技术。
模糊控制理论是由美国著名的学者加利福尼亚大学教授Zadeh·L·A于1965年首先提出,它是以模糊数学为基础,用语言规则表示方法与先进的计算机技术,由模糊推理进行决策的一种高级控制策。
在1968~1973年期间Zadeh·L·A先后提出语言变量、模糊条件语句与模糊算法等概念与方法,使得某些以往只能用自然语言的条件语句形式描述的手动控制规则可采用模糊条件语句形式来描述,从而使这些规则成为在计算机上可以实现的算法。
1974年,英国伦敦大学教授Mamdani·E·H研制成功第一个模糊控制器, 并把它应用于锅炉与蒸汽机的控制,在实验室获得成功。
这一开拓性的工作标志着模糊控制论的诞生并充分展示了模糊技术的应用前景。
模糊控制实质上是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。

模糊控制原理与应用一、引言在现实世界的控制系统中,我们常常面临各种各样的不确定性和模糊性。
传统的控制理论往往无法有效地处理这些问题,而模糊控制理论的提出填补了这一空白。
模糊控制原理与应用是一门涉及模糊集合、模糊逻辑和模糊推理的学科,它已经在各个领域取得了广泛的应用和重要的成果。
二、模糊控制的基本原理模糊控制的基本原理是将传统的精确控制方法中的精确数学模型替换为模糊数学模型。
模糊数学模型中使用模糊集合来描述系统的输入和输出变量,并使用模糊规则来描述系统的控制策略。
2.1 模糊集合模糊集合是对传统集合的一种推广,它允许一个元素具有一定程度的隶属度。
在模糊控制中,我们通常使用隶属函数来描述模糊集合的隶属度分布。
2.2 模糊逻辑模糊逻辑是一种符号运算方法,它可以处理模糊集合上的逻辑运算。
在模糊控制中,我们使用模糊逻辑运算来进行模糊推理,从而得出控制信号。
2.3 模糊推理模糊推理是指从模糊规则和模糊事实出发,通过模糊逻辑运算得出一个模糊结论。
在模糊控制中,模糊推理用于将模糊输入映射为模糊输出。
三、模糊控制的应用领域模糊控制在各个领域都取得了广泛的应用。
下面介绍几个典型的应用领域。
3.1 自动化控制模糊控制在自动化控制系统中具有重要的应用价值。
通过使用模糊控制,可以有效地处理控制对象的各种不确定性和模糊性,提高控制系统的稳定性和鲁棒性。
3.2 智能交通模糊控制在智能交通系统中扮演着重要的角色。
通过使用模糊控制,可以根据交通状况和驾驶行为进行实时调整,从而提高交通系统的效率和安全性。
3.3 机器人控制模糊控制在机器人控制领域得到广泛应用。
通过使用模糊控制,可以实现对机器人的路径规划、动作控制和任务调度等功能,从而提高机器人的智能性和灵活性。
3.4 电力系统模糊控制在电力系统中的应用越来越多。
通过使用模糊控制,可以实现对电力系统的负荷预测、调度优化和设备故障诊断等功能,从而提高电力系统的稳定性和可靠性。
四、模糊控制的优势与不足模糊控制具有一些明显的优势,但也存在一些不足之处。
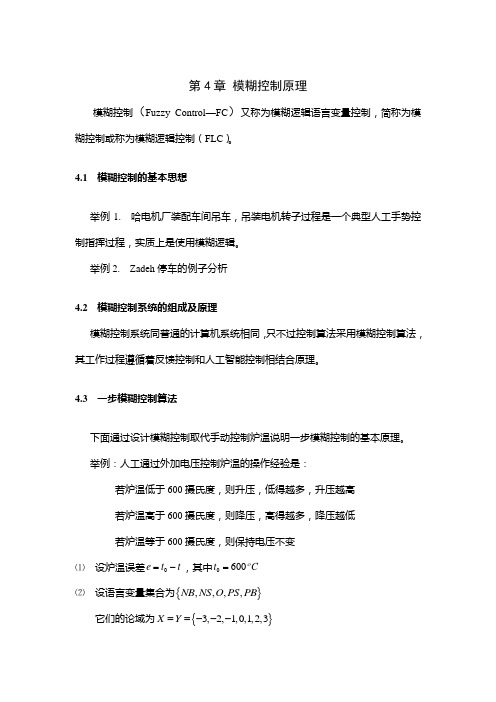
第4章 模糊控制原理模糊控制(Fuzzy Control —FC )又称为模糊逻辑语言变量控制,简称为模糊控制或称为模糊逻辑控制(FLC )。
4.1 模糊控制的基本思想举例1. 哈电机厂装配车间吊车,吊装电机转子过程是一个典型人工手势控制指挥过程,实质上是使用模糊逻辑。
举例2. Zadeh 停车的例子分析4.2 模糊控制系统的组成及原理模糊控制系统同普通的计算机系统相同,只不过控制算法采用模糊控制算法,其工作过程遵循着反馈控制和人工智能控制相结合原理。
4.3 一步模糊控制算法下面通过设计模糊控制取代手动控制炉温说明一步模糊控制的基本原理。
举例:人工通过外加电压控制炉温的操作经验是:若炉温低于600摄氏度,则升压,低得越多,升压越高若炉温高于600摄氏度,则降压,高得越多,降压越低若炉温等于600摄氏度,则保持电压不变⑴ 设炉温误差0e t t =-,其中0600t C ο=⑵ 设语言变量集合为{},,,,NB NS O PS PB它们的论域为{}3,2,1,0,1,2,3X Y ==---⑶ 将操作经验写成模糊条件语句:if e = NB then u=PBor if e = NS then u=PSor if e = O then u=Oor if e = PS then u=NSor if e = PB then u=NB⑷ 将模糊条件语句构成的模糊关系表示为:e u e u e u e u e e R NB PB NS PS O O PS NS PB NB =⨯+⨯+⨯+⨯+⨯将各语言变量用模糊向量表示,则可计算出R得0 0 0 0 00.5 1 0 0 0 00.50.50.5 0 00.50.5 10.5 0 0 00.5 10.5 0 0 00.5 10.50.5 0 00.50.50.5 0 0 0 0 10.5 0 0 0 0 0R ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦ ⑸ 模糊推理决策:因e e PS = ,故()0.5,0.5,1,0.5,0.5,0,0u e R == ⑹ 将控制量的模糊量0.50.50.50.50013210123u =++++---++去模糊化,采用最大隶属度方法可得对应元素1=u ,再将其转换成精确值即可通过执行机构去施加控制。


模糊PID控制原理与设计步骤模糊PID控制(Fuzzy PID control)是在PID控制基础上引入了模糊逻辑的一种控制方法。
相比传统的PID控制,模糊PID控制能够更好地适应系统的非线性、时变和不确定性等特点,提高系统的性能和鲁棒性。
设计步骤:1.确定系统的模型和控制目标:首先需要对待控制的系统进行建模,确定系统的数学模型,包括系统的输入、输出和动态特性等。
同时,需要明确控制目标,即系统应达到的期望状态或性能指标。
2.设计模糊控制器的输入和输出变量:根据系统的特性和控制目标,确定模糊控制器的输入和输出变量。
输入变量通常为系统的误差、误差变化率和累积误差,输出变量为控制力。
3.确定模糊集和模糊规则:对于每个输入和输出变量,需要确定其模糊集和模糊规则。
模糊集用于将实际变量映射为模糊集合,如“大、中、小”等;模糊规则用于描述输入变量与输出变量之间的关系,通常采用IF-THEN形式,如“IF误差大AND误差变化率中THEN控制力小”。
4.编写模糊推理和模糊控制算法:根据确定的模糊集和模糊规则,编写模糊推理和模糊控制算法。
模糊推理算法用于根据输入变量和模糊规则进行推理,生成模糊的输出变量;模糊控制算法用于将模糊的输出变量转化为具体的控制力。
5.调试和优化:根据系统的实际情况,调试和优化模糊PID控制器的参数。
可以通过试错法或专家经验等方式对模糊集、模糊规则和模糊函数等进行调整,以达到较好的控制效果。
6.实施和验证:将调试完成的模糊PID控制器应用到实际系统中,并进行验证。
通过监控系统的实际输出和期望输出,对模糊PID控制器的性能进行评估和调整。
总结:模糊PID控制是一种将模糊逻辑引入PID控制的方法,能够有效地提高系统的性能和鲁棒性。
设计模糊PID控制器的步骤主要包括确定系统模型和控制目标、设计模糊控制器的输入输出变量、确定模糊集和模糊规则、编写模糊推理和模糊控制算法、调试和优化以及实施和验证。
通过这些步骤,可以设计出较为优化的模糊PID控制器来实现系统的控制。