光学设计第12章像质评价
- 格式:doc
- 大小:1.30 MB
- 文档页数:21
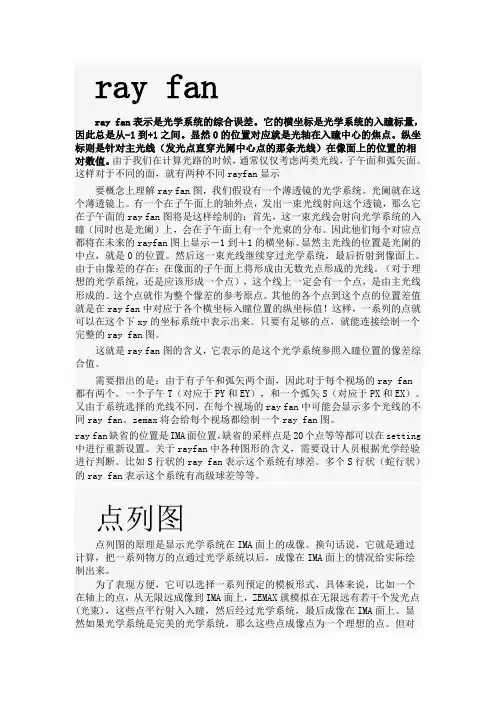
ray fanray fan表示是光学系统的综合误差。
它的横坐标是光学系统的入瞳标量,因此总是从-1到+1之间。
显然0的位置对应就是光轴在入瞳中心的焦点。
纵坐标则是针对主光线(发光点直穿光阑中心点的那条光线)在像面上的位置的相对数值。
由于我们在计算光路的时候,通常仅仅考虑两类光线,子午面和弧矢面。
这样对于不同的面,就有两种不同rayfan显示要概念上理解ray fan图,我们假设有一个薄透镜的光学系统。
光阑就在这个薄透镜上。
有一个在子午面上的轴外点,发出一束光线射向这个透镜,那么它在子午面的ray fan图将是这样绘制的:首先,这一束光线会射向光学系统的入瞳(同时也是光阑)上,会在子午面上有一个光束的分布。
因此他们每个对应点都将在未来的rayfan图上显示-1到+1的横坐标。
显然主光线的位置是光阑的中点,就是0的位置。
然后这一束光线继续穿过光学系统,最后折射到像面上。
由于由像差的存在;在像面的子午面上将形成由无数光点形成的光线。
(对于理想的光学系统,还是应该形成一个点),这个线上一定会有一个点,是由主光线形成的。
这个点就作为整个像差的参考原点。
其他的各个点到这个点的位置差值就是在ray fan中对应于各个横坐标入瞳位置的纵坐标值!这样,一系列的点就可以在这个下xy的坐标系统中表示出来。
只要有足够的点,就能连接绘制一个完整的ray fan图。
这就是ray fan图的含义,它表示的是这个光学系统参照入瞳位置的像差综合值。
需要指出的是:由于有子午和弧矢两个面,因此对于每个视场的ray fan都有两个。
一个子午T(对应于PY和EY),和一个弧矢S(对应于PX和EX)。
又由于系统选择的光线不同,在每个视场的ray fan中可能会显示多个光线的不同ray fan。
zemax将会给每个视场都绘制一个ray fan图。
ray fan缺省的位置是IMA面位置,缺省的采样点是20个点等等都可以在setting 中进行重新设置。
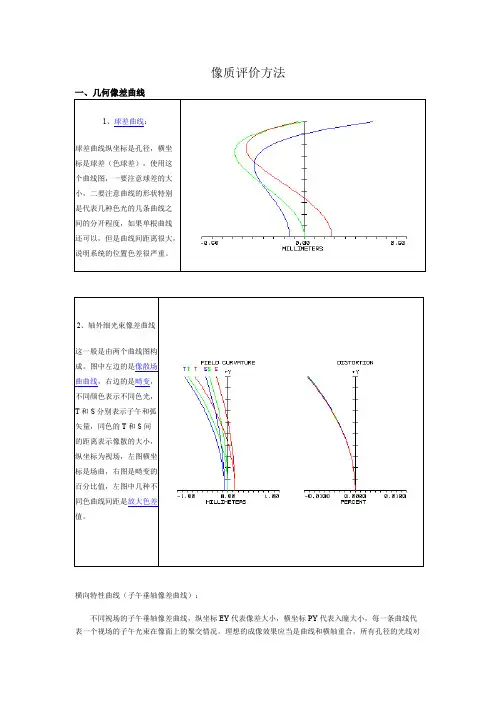
像质评价方法一、几何像差曲线1、球差曲线:球差曲线纵坐标是孔径,横坐标是球差(色球差),使用这个曲线图,一要注意球差的大小,二要注意曲线的形状特别是代表几种色光的几条曲线之间的分开程度,如果单根曲线还可以,但是曲线间距离很大,说明系统的位置色差很严重。
2、轴外细光束像差曲线这一般是由两个曲线图构成。
图中左边的是像散场曲曲线,右边的是畸变,不同颜色表示不同色光,T和S分别表示子午和弧矢量,同色的T和S间的距离表示像散的大小,纵坐标为视场,左图横坐标是场曲,右图是畸变的百分比值,左图中几种不同色曲线间距是放大色差值。
横向特性曲线(子午垂轴像差曲线):不同视场的子午垂轴像差曲线,纵坐标EY代表像差大小,横坐标PY代表入瞳大小,每一条曲线代表一个视场的子午光束在像面上的聚交情况。
理想的成像效果应当是曲线和横轴重合,所有孔径的光线对都在一点成像。
纵坐标上对应的区间就是子午光束在理想像面上的最大弥散斑范围。
这个数值和点列图中的GEO尺寸一致,GEO尺寸就是横向特性曲线中该视场三个光波中弥散最大的那个半径。
其中主光线用于描述单色像差情况;三个波长曲线用于描述垂轴色差情况。
横向像差特性曲线图表示了视场角由小到大时垂轴像差曲线的变化,从中可以看出子午垂轴像差随视场变化规律。
子午垂轴像差曲线的形状当然是子午像差:细光束子午场曲、子午球差和子午彗差决定的,因此曲线形状和像差数量的对应关系经常在像差校正中用到。
根据像差曲线可以判断出要改善系统的成像质量,就必须改变曲线的形状和位置,即改变三种子午像差的数量。
将子午光线对a、b作连线,该连线的斜率m = (Ya-Yb)/2h 与宽光束子午场曲X’T成正比。
口径改变时,连线斜率变化表示宽光束子午场曲也随着变化。
当口径减小趋于0时,连线成了坐标原点(对应主光线)的切线,切线的斜率和细光束子午场曲x’t相对应。
子午光线对连线的斜率与原点切线斜率之间的差和子午球差(X’T – x’t)成正比,两个斜率夹角越大,子午球差越大。
光学系统像质评价方法那最直观的一种呢,就是星点检验法。
这就像是拿个小镜子去照星星,看星星在镜子里的成像情况。
如果成像清晰,像个完美的小亮点,那就说明这个光学系统还不错呢。
要是星星的像看起来模模糊糊的,或者周围有奇怪的光晕之类的,那这个光学系统可能就有点小毛病啦。
这就好比一个人脸上有脏东西,一眼就能看出来,很直接的一种判断方式哦。
还有分辨率检验法。
你可以想象成看一幅超级复杂的画,画里有好多密密麻麻的线条和小图案。
如果光学系统好,那这些小细节就能看得清清楚楚的,就像你有一双超级锐利的眼睛。
要是分辨率不行呢,那些小线条就会糊成一团,就像近视眼没戴眼镜看东西一样。
这能反映出光学系统分辨微小物体的能力呢。
调制传递函数(MTF)法也很厉害哦。
这个有点像给光学系统打分啦。
它能告诉我们这个系统在不同空间频率下的成像质量。
简单说呢,就像是看这个光学系统在处理简单图案和复杂图案时的表现。
如果MTF的值比较高,那就说明这个光学系统在传递图像信息的时候很靠谱,就像一个很负责的快递员,能把包裹完好无损地送到目的地。
要是MTF值低,那图像的信息可能在传递过程中就丢三落四的啦。
波像差法也不能少呀。
它是从波前的角度来看待像质的。
就好比看水面上的波浪,如果波浪很规则,那成像就会好。
要是波浪乱七八糟的,那像质肯定就受影响啦。
这个方法就像是从根源上去找像质不好的原因,看是哪个环节让波前变得不那么听话了。
像差曲线法呢,就像是给光学系统的像差画个像。
通过这个曲线,我们能很清楚地看到像差是怎么分布的。
就像给光学系统做个体检报告,哪里有问题,从曲线里就能看个大概。
像差基础理论与像质评价2006-03-10实际光学系统中,只有平面反射镜在理论上具有理想光学系统的性质.其它光学系统都不能以一定寛度的光束对一定大小的物体成完善像,即物体上任一点发出的光束通过光学系统后不能会聚为一点,而形成一弥散斑,或者使像不能严格地表现出原物形状,这就是像差.一.像差的分类( 一) 几何像差分为两大类,共七种,如下:1单色像差A.球差B.慧差C.像散D.场曲E.畸变2.色差A.位置色差( 轴向色差)B.倍率色差( 放大率色差或垂轴色差)( 二) 波像差由点光源发出的光应向各方向传播相同的距离,因此,波面应该是中心点与点光源重合的球面,称为球面波.此球面波经光学系统后,由于各个面的折射而改变了曲率.如果光学系统是理想的,那边那么形成一个新的球面波.但是实际上, 光学系统总有剩余像差,使折射以后的波面或多或少地变了形,而不复为球面波.这一变了形的实际波面与理想球面波之间的偏离,称为波像差.( 三) 单色像差又可分为以下两类:1.轴上点像差: A. .球差. B.正弦差.2.轴外点像差: A. 轴外球差. B.慧差 C.像散 D.场曲 E.畸变二.像差的基本概念( 一) 球差δĽ球差δĽ在数值上是轴点发出的不同孔径光线像方截距L’与近轴光截距ℓ’之差值,即:δĽ=L’-ℓ’举例:有一镜头,参数如下:R TC n25.815 4.0 1.5163-25.815-1-垂轴球差: δT'=δL'tgU'由于像平面上的像是由弥散斑组成,所以不能反映物体的细节,球差严重时,像就变得糢糊不清. 所以任何光学系统都必须校正好球差.( 二) 慧差轴外点B发出子午光束,主光线,上光线和下光线不交于一点.在折射前主光线是光束的轴线,而折射后主光线不再是光束的轴线.光线失去了对称性.用上,下光线交点到主光线的垂直光轴方向的偏离来表示这种光束的不对称, 称为子午慧差. K’T=1/2(Y’a+Y'b)-Y'zY’a---上光线在高斯像面上的交点高度.Y'b---下光线在高斯像面上的交点高度Y'z---主光线在高斯像面上的交点高度-2-( 三) 像散当轴外物点B通过有像散的光学系统成像时,使一屏沿光轴移动,在不同位置时,B点的像就会发生很大的变化.在位置1时,为一长轴垂直于子午面的椭圆;移到位置2时为一垂直于子午面的短线;在位置3时又成为一长轴和子午面垂直的椭圆;在位置4时形成一个原斑;在位置5时形成一长轴在子午面内的椭圆;位置6时形成一子午面内的短线;位置7时又扩散成为椭圆。
![光学系统像质评价 [自动保存]](https://uimg.taocdn.com/cd0415ccc1c708a1284a4478.webp)
科技资讯科技资讯S I N &T NOLOGY I NFORM TI ON2008N O .12SC I ENCE &TEC HN OLO GY I NFO RM ATI O N学术论坛1瑞利判断和中心点亮度1.1瑞利判断定义:实际波面与参考球面波之间的最大波像差不超过4/λ时,此波面可看作是无缺陷的。
优点:便于实际应用缺点:不够严密。
适用范围:是一种较为严格的像质评价方法,适用于小像差光学系统。
1.2中心点亮度1)中心点亮度:光学系统存在像差时,其成像衍射斑的中心亮度和不存在像差时衍射斑的中心亮度之比S.D 来表示光学系统的成像质量。
2)斯托列尔准则:当S.D ≥0.8,认为光学系统的成像质量是完善的。
3)适用范围:是一种高质量的像质评价标准,适用于小像差光学系统。
4)缺点:计算相当复杂,很少作为计算评价方法使用。
2分辨率分辨率反映光学系统分辨物体细节的能力,是一个很重要的指标参数,故也可用分辨率作为光学系统的成像质量评价方法。
2.1分辨率基本公式根据衍射理论,光学系统的最小分辨角为Δθ:Δθ=1.22λ/D对不同类型的光学系统,可由上式得到不同的表示形式。
2.2缺点1)只适用于大像差光学系统;2)与实际情况存在差异;3)存在伪分辨现象.故用分辨率来评价光学系统的成像质量也不是一种严格而可靠的评价方法。
2.3优点其指标单一,便于测量,在光学系统像质检测中得到广泛应用。
3点列图3.1点列图定义在几何光学的成像过程中,由一点发出的许多条光线经光学系统成像后,由于像差的存在,使其与像面的交点不再集中于一点,而是形成一个分布在一定范围内的弥散图形,称为点列图。
3.2适用范围适用于大像差光学系统。
照相物镜的像质评价:利用集中30%以上的点或光线所构成的图形区域作为其实际有效的弥散斑,弥散斑直径的倒数为系统的分辨率。
3.3优缺点优点:简便易行,形象直观。
缺点:工作量非常大,只有利用计算机才能实现。
第七章像质评价7.1 引言在前面中,我们讲述了光线计算和光学系统中的像差。
根据前面所学到的知识,基本上就可以进行光学仪器中的光路设计了,但设计的结果怎么样?质量如何?是否满足使用要求就不得而知了。
这就需要有一套评价光学系统质量优劣的方法和手段。
由光线追迹知道,由点目标发出的一束光线经过光学系统后,这些光线并不都相交于像面上一点。
如果我们选定某一点作为参考点,那么这些光线的交点与参考点的偏差就是像差。
我们还可以这样说,从几何光学观点看,如果一个光学系统是理想的,那么光学系统对点目标所成的像也是一个点。
也就是说,目标点和所成的像点是一一对应的。
但是,由于绝大多数光学系统均有像差存在,这种一一对应的关系就被破坏了,点目标所成的像不再是一个点,而是有一定几何尺寸的弥散斑。
实际上,点目标的像是成像光线在像面上交点的集合。
从物理光学观点看,即使光学系统是没有任何像差的理想光学系统,那么一个点目标通过该系统所成的像也不是一个点像,而是和光学系统口径有直接关系的、具有一定尺寸的衍射图样。
如果光学系统的通光孔径是圆形的,那么点目标的衍射图样便是以中心亮盘为中心,周围环绕以亮度逐渐减弱的、明暗交替的环,其形状便是著名“爱里斑”。
由上面的分析知道,光学系统对点目标所成的像并非一个“点”,而是具有一定几何尺寸的弥散斑。
弥散斑的尺寸取决丁光学系统的通光口径、波长和光学系统的像差。
我们可以把目标看做是由大量的点元组成的集合体。
目标中的每一个点通过光学系统成像后均为一个弥散斑,这些弥散斑的集合就构成了目标的图像。
因此,详细讨论点目标(包括轴上点和轴外点)的成像特件,并对其成像质量进行评价是十分有意义的。
我们现在面对的事实是:一个光学系统对点目标所成的像,即弥散斑的尺寸有多大,它是衍射效应占主导,还是几何像差占主导,多大尺寸的弥散斑是可以接受的,弥散斑内的能量是如何分布的,图像的对比度降低了多少,该系统的整体质量如何,这些问题集中起来就是像质评价要解决的主要内容。
光学传递函数及像质评价实验
为了验证光学传递函数的效果及像质评价,我们可以进行以下实验步骤:
1.实验设备准备:需要一台光学系统(如显微镜或相机),一块分辨率较高的测试样品,一个光源。
2.设置实验条件:将光源放置在适当的位置,并调整光源亮度,确保样品可以被均匀照亮。
3.调整光学系统:根据实验需要调整光学系统的焦距和对焦,确保系统焦平面和样品表面平行。
4.测试样品特征:选择一个特定的测试样品特征,例如周期性图案或微小物体。
这个特征应具有不同的空间频率成分,以测试系统对不同频率的传递特性。
5.测量光学传递函数:在样品表面将获取到的光强数据与输入信号的光强数据进行比较,可以得到光学传递函数。
这可以通过使用透射或反射模式,在各个空间频率下测量光强。
6.分析光学传递函数:利用所获得的数据,可以将光学传递函数进行数学处理,得到系统的频率响应。
7.像质评价:通过分析光学传递函数的幅度和相位信息,可以评价系统的分辨能力和像质。
这可以通过计算MFTF(边际空域通过函数)和MTF (边际传递函数)等参数来完成。
8.结果分析:将所得到的光学传递函数及像质评价结果与已知标准进行比较,判断测试样品及光学系统的性能。
9.实验优化:根据实验结果,可以调整光源、调整焦距或更改测试样品,以改善像质和光学系统的传递特性。
通过进行光学传递函数及像质评价实验,我们可以对光学系统的性能进行客观的测量和评估。
通过这些实验结果,我们可以了解系统对不同频率的分辨能力,进一步优化光学系统的设计和参数。
此外,像质评价也可以为工业控制、医学诊断、科学研究等领域中对图像质量要求较高的应用提供支持。
切割机组安全操作规程范本第一章总则第一条为了保证切割机组的安全操作,保护人员的生命财产安全,制订本规程。
第二条本规程适用于切割机组的安全操作,适用于所有切割机组工作人员。
第三条切割机组工作人员应严格按照本规程的要求进行操作,严禁违反本规程进行操作。
第四条切割机组工作人员应熟悉并遵守相关国家法律法规、行业规范、标准及企业规章制度。
第五条切割机组工作人员应参加相应的安全操作培训,熟练掌握切割机组的操作技能。
第二章安全准备第六条切割机组工作人员在进行操作前应检查切割机组的设备设施是否完好,如发现异常应立即报告。
第七条切割机组操作区域应保持空气畅通,无明火,无易燃物品,地面应保持干燥清洁。
第八条切割机组工作人员操作前应穿戴防护用品,如钢盔、防护眼镜、防护手套等。
第九条切割机组操作前应将周围的人员和有关部门进行告知,确保操作过程中无人员靠近。
第十条切割机组操作前应检查操作手册,了解切割机组的工作原理和操作要点。
第十一条切割机组的操作人员应持证上岗,严禁非专业人员操作。
第三章安全操作第十二条切割机组操作前应检查切割机组的电源、气源是否正常,并进行预热。
第十三条切割机组的调试、维修等操作应由专业人员进行。
第十四条切割机组操作人员应全神贯注,不得擅自离开切割机组操作区域。
第十五条切割机组操作人员应按照操作手册的要求进行操作,严禁超负荷操作。
第十六条切割机组操作人员应保持设备的清洁、整齐,及时清理加工过程中产生的边角料。
第十七条切割机组操作人员应注意观察切割过程中的异常情况,如发现异常应及时停机排除故障。
第十八条切割机组操作人员应注意人身安全,严禁将手、脚伸入机器运动部位。
第十九条切割机组操作人员应定期检查切割设备的稳定性和安全性,如发现问题应及时排除。
第四章紧急处置第二十条切割机组操作人员在发生事故或紧急情况时,应第一时间采取紧急停机措施,并立即报告。
第二十一条切割机组操作人员在发生火灾时,应第一时间报警并进行灭火,确保人员的生命安全。
像质评价方法一、几何像差曲线1、球差曲线:球差曲线纵坐标是孔径,横坐标是球差(色球差),使用这个曲线图,一要注意球差的大小,二要注意曲线的形状特别是代表几种色光的几条曲线之间的分开程度,如果单根曲线还可以,但是曲线间距离很大,说明系统的位置色差很严重。
2、轴外细光束像差曲线这一般是由两个曲线图构成图中左边的是像散场曲曲线,右边的是畸变,不同颜色表示不同色光,T和S分别表示子午和弧矢量,同色的T和S间的距离表示像散的大小,纵坐标为视场,右图横坐标是场曲,左图是畸变的百分比值,左图中几种不同色曲线间距是放大色差值。
二、点列图——光束的光亮度由一点发出的许多光线经光学系统后,因像差使其与像面的交点不再集中于同一点,而形成了一个散布在一定范围的弥散图形,称为点列图。
,点列图是在现代光学设计中最常用的评价方法之一。
图中的几个图分别表示给定的几个视场上不同光线与像面交点的分布情况。
使用点列图,一要注意下方表格中的数值,值越小成像质量越好。
二根据分布图形的形状也可了解系统的几何像差的影响,如,是否有明显像散特征,或彗差特征,几种色斑的分开程度如何,有经验的设计者可以根据不同的情况采取相应的措施。
RMS RADIUS:均方根半径值;GEO RADIUS:几何半径(最大半径)三、传递函数调制传递函数MTF:一定空间频率下像的对比度与物的对比度之比。
能反映不同空间频率、不同对比度的传递能力。
一般而言,高频传递函数反映了物体细节传递能力,低频传递函数反映物体轮廓传递能力,中频传递函数反映对物体层次的传递能力。
1、MTF曲线图图中不同色的曲线表示不同视场的复色光(白光)MTF曲线,T和S分别表示子午和弧矢方向,最上方黑色的曲线是衍射极限。
横坐标是空间频率lp/mm(每毫米线对),纵坐标是对比度,最大是1。
曲线越高,表明成像质量越好。
[返回本章要点]2、传函与离焦关系曲线图此图表明对设定空间频率不同视场的子午、弧矢MTF与离焦量的关系,图中横坐标是离焦量,纵坐标是对比度,通过此图可以看出各视场的最佳焦面是否比较一致,MTF是否对离焦比较敏感。
第十二章 像质评价光学设计必须校正光学系统的像差,但既不可能也无必要把像差校正到完全理想的程度,因此选择像差校正的最佳方案,也需要确定校正到怎样的程度才能满足使用要求,即确定像差容限。
一个光学系统对点目标所成的像,即弥散斑的尺寸有多大,它是衍射效应占主导地位还是几何像差占主导,多大尺寸的弥散斑是可以接受的,弥散斑内的能量是如何分布的,图像的对比度降低了多少,该系统的整体质量如何,这些问题集中起来就是像质评价要解决的主要问题。
任何物体可以分解为物点,也可以分解为各种频率的谱,两种不同的分解方法构成两类评价光学系统的方法。
第一类以物点所发出的光能在像空间的分布状况作为质量评价的依据。
事实上,即使理想光学系统也会由于衍射使物点不能成点像而形成一个衍射光斑。
点像的衍射图样中,光斑主要集中在中央亮斑中,这一亮斑称为艾里斑,而像差的存在使衍射光斑的能量比无像差的时候更为分散。
属于这一类的像质评价方法有斯特列尔判断、瑞利判断和分辨率。
对于大像差系统,通常用几何光线的密集度来表示,与此对应的评价方法有点列图。
第二类方法是仿效电讯系统而得到的。
大多数情况下,可把光学系统看成是线性系统,并用傅氏分析法将物体分解为一系列不同频率的正弦分布,它们经线性系统传递到像方时频率不变,但对比度要下降,要发生相移,并截止于某一频率。
对比度的降低和相移与频率之间的函数关系称为光学传递函数,它与像差有关,因此光学传递函数是评价光学系统的像质的更全面、客观的一项指标。
§1 典型光学系统的像差公差光学系统的像差公差的制定是一个十分复杂的问题,不仅要考虑光学系统本身的质量,还要考虑目标特征、探测器的情况以及具体的使用要求等。
对于小像差系统,以瑞利判断为依据:如果实际波前与参考波前的光程差在λ/4范围内,则认为成像是理想的。
望远镜、显微镜为小像差系统,要求这类物镜的像差控制在瑞利极限之内,至少球差是如此。
有些系统,比如照相物镜、投影物镜、以及各种摄像机所使用的镜头等大像差系统,是无法把像差控制在瑞利极限以内的,实际上也没有必要,以几何像差来评价其成像质量就可以了。
一 望远物镜和显微物镜的像差公差望远镜和显微镜由于视场较小,并且多用于目视或其他对成像质量要求较高的场合。
因此,应该保证轴上点及光轴附近区域内有良好的成像质量,必须校正好球差、位置色差和正弦差,使之符合瑞利判断的要求。
在这种小像差系统中,当波像差W 控制在瑞利极限范围内(4λ≤W )时,可以求出球差、彗差等像差公差。
1. 球差(1)当仅有初级球差存在时,边缘球差的允许量为:/2//sin 4mm U n LA ⋅±=λ(2)有初级和二级球差存在时,边缘球差和带球差(0.707带)的允许量分别为/2//sin 4mm U n LA ⋅±=λ/2//sin 6mz U n LA ⋅±=λ(3)允许离焦量为/2/sin 2mU n ⋅±=λδ2. 彗差(1)弧矢彗差//sin 2ms U n Coma ⋅±=λ(2)子午彗差//sin 23mt U n Coma ⋅±=λ(3)正弦差///sin 2mUh n OSC ⋅⋅=λ或者 0025.0±=OSC3. 像散 /2//sin mUn x ⋅=∆λ4. 像面弯曲:/s x 和/t x 在眼睛的调节范围内 5. 畸变 %10~5/0/≤yy δ6.色差(1)轴向色差 /2//sin mU n LchA ⋅±=λ(2)倍率色差:以角度计小于//4~2 (3)色差波像差4)(//λδ≤⋅-∑FC n D d式中,λ为波长,/n 是像方介质的折射率,/m U 为像方孔径角,/h 为像高。
在像差公差的表达式中,除了彗差和正弦差之外,像差是沿纵向量度的。
对于轴向色差,实际上的允许值比这个值要大,因为对于一个目标系统,人眼的灵敏波长是m μλ55.0=,对F 光和C 光的灵敏度明显降低,因此,实际允许的/LchA 值要比所规定的大2~3倍。
彗差和正弦差的实际允许值也常常超过上述的规定值。
因为要把一个系统的彗差或正弦差校正到上述规定值以内是很困难的。
康拉德(Conrady )给出下面的经验值:对于望远系统,0025.0±=OSC ;对于照相物镜,001.0±=OSC 是允许的。
离焦量可用于对场曲的限制,然而实际上的弧矢场曲/s x 和子午场曲/t x 值均要超过这个值,通常要求/t x 和/s x 不要超过规定值的2~3倍。
二 望远目镜和显微目镜的像差公差目镜是小相对孔径、大视场光学系统,对于轴上点像差(包括球差和轴向色差)可按小像差系统来要求。
对于球差,一般不用特殊校正就会满足要求。
轴外点像差是设计目镜系统要考虑的主要像差。
像散)(//s t x x -对像的清晰度影响很大,其公差要与弧矢彗差一样来考虑。
像面弯曲(/s x 和/t x )可以用焦深加以限制。
如果视场很大,可以用人眼的调节范围(5±屈光度)来估计。
畸变只改变像的大小,不影响其清晰度,因此对它的要求不严格,一般以不为人眼发现为准则,具体要求为 1 子午慧差///sin 23mT U n Coma ⋅≤λ2 像散/2///sin 2ms t Un x x ⋅≤-λ3 场曲/2//sin 2mt U n x ⋅≤λ,/2//sin 2ms U n x ⋅≤λ4 畸变%5~%3/≤T D5 垂轴色差通常用目镜焦平面上的垂轴色差与目镜焦距的比值,即角像差来衡量。
目镜视场0302<ω时,0015.0//≤∆目f y FC 弧度(约为/5), 目镜视场060~302=ω时,001.0//≤∆目f y FC 弧度(约为/4.3), 目镜视场0602>ω时,003.0//≤∆目f y FC 弧度(约为/10)三 照相物镜的像差公差照相物镜为大像差光学系统,属于这一类的物镜还有投影物镜(包括电影放映物镜)、电影和电视摄影物镜、CCD 摄像机物镜等。
这类物镜的像差公差制定起来比较困难,因为影响因素比较复杂,除了要考虑镜头本身的质量,还要考虑接受器的类型和质量、目标的特性以及使用要求等。
目前常用的接受器有胶片、电荷耦合器件(CCD )、各种投影屏等。
这些接受器件的质量差别很大。
照相物镜的像质一般不以瑞利判断为评价标准。
应用上多以像差在像面上形成的弥散斑大小作为衡量成像质量的标准。
这是一种综合性的像质衡量标准,包括各种像差的影响。
通常要求弥散斑的直径不超过mm 03.0~01.0。
由于垂轴色差引起各色光弥散斑的不重合,也就是说增大了总的弥散斑,故要求较严,一般要求垂轴色差不超过mm 01.0。
畸变应以使人感觉不出像有变形为限,一般要求相对畸变不超过2%。
对于这类大像差系统要根据实际情况进行考虑。
也可以将质量优良的同类物镜的质量指标作为依据来加以考虑。
§2 斯特列尔判断K.Strehl 于1894年提出了判断小像差光学系统像质的标准。
光学系统有像差时,衍射图样中心亮斑(艾里斑)占有的光强度要比理想成像时有所下降,两者的光强度比称为Strehl 强度比,又称为中心点亮度,以..D S 表示。
Strehl 判断认为,中心点亮度8.0..≥D S 时,系统是完善的。
如图12-1所示,根据惠更斯-菲涅尔原理,点光源S 对P 点的作用,可以看成是S 与P 之间的任何一个波面上各点所发出的次波在P 点的叠加结果。
基尔霍夫(Kirchhoff )从波动方程出发,由场论推导出求P 点振幅的比较严格的公式: 图12-1 惠更斯-菲涅尔原理⎰⎰⋅⋅+⋅=⋅⋅-M lk i QP d le i σθλψψ2cos 1 式中,Q ψ为波面M 上Q 点处的复振幅,σd 为波面元,λπ2=k ,l 是Q 、P 之间的光路长度。
可以把M 看作是由S 点光源发出的光经过出射光瞳时的波面。
当出射光瞳通光孔不很大时,可认为1cos ≈θ。
若以M 面上发出的光振动为1个单位,即1=Q ψ,并设像面坐标为z y x 、、,出射光瞳极坐标为ϕ、r ,令z 轴与光轴重合,并对一般具有圆形通光孔的光学系统,取通光孔半径为1,则ϕλψψπd dr r le iz y x lk i P ⋅⋅⋅=∆∆∆=⎰⎰⋅⋅-1020),,( 物点发出的波面经过理想光学系统后,在出射光瞳处得到的是球面波,而实际光学系统的像差使像方的波面不再是球面波。
像差的影响就是通过这种相位的变化而反映为衍射图的变化。
若像差引起的光程差,即波像差为W ,则只需将指数上的l 变为W l +,即可计算有像差存在时的P ψ值。
相应的中心点亮度可表示为:2102022,20,1..ϕπψψπd dr r eD S Wk i W P W P ⋅⋅⋅==⎰⎰⋅⋅-=≠当像差很小时,可把积分中指数函数展开成幂级数。
若πλ21=<k W ,则取展开式的前三项即可。
由此得到:21020222)21(1..ϕππd dr r W k ikW D S ⋅⋅⋅⋅-+=⎰⎰22221Wk W ik ⋅-+≈])[(1222W W k -⋅-≈式中,W 是波像差的平均值,2W 是波像差的平方平均值,而且0)(22≈Wϕππd dr r W W ⋅⋅⋅=⎰⎰10201,ϕππd dr r W W ⋅⋅⋅=⎰⎰1020221由于计算波像差W 时,参考球面的半径是可以任意选择的,故W 中可以有常数项。
适当选择常数项,总可以使0=W 。
作此选择后,..D S 就只与波像差的平方平均值有关了:221..W k D S ⋅-=可见,一个像差很小的光学系统,中心点亮度与波像差之间有简单的关系。
利用这一关系和上述8.0..≥D S 的判断,就可以决定像差的最佳校正方案和像差公差。
斯特列尔提出的中心点亮度8.0..≥D S 的判断是评价小像差系统成像质量的一个比较严格而又可靠的方法,但是计算起来相当复杂,不便于实际应用。
§3 瑞利判断1879年瑞利(Rayleigh )在观察和研究光谱仪成像质量时,提出了一个简单的判断:实际波面与参考球面之间的最大偏离量,即最大波像差,不超过四分之一波长时,此实际波面可以认为是无缺陷的。
这称为瑞利判断。
瑞利判断提出了两个标准。
首先,有特征意义的是波像差最大值,而参考球面的选择标准是使波像差的最大值为最小。
这实际上是最佳像面位置的选择问题。
其次,提出在这种情况下波像差的最大值允许量不超过四分之一波长时,认为成像质量是好的。
实际上,通过计算的最大波像差不超过四分之一波长的瑞利判断与斯特列尔提出的中心点亮度8.0..≥D S 的判断是一致的。
从光波传播光能的观点来看,瑞利判断是不够严密的。