控制工程基础 第7章 控制系统的性能分析与校正
- 格式:ppt
- 大小:963.50 KB
- 文档页数:114

《机械控制工程基础》习题及解答目录第1章绪论第2章控制系统的数学模型第3章控制系统的时域分析第4章控制系统的频域分析第5章控制系统的性能分析第6章控制系统的综合校正第7章模拟考试题型及分值分布第1章绪论一、选择填空题1.开环控制系统在其控制器和被控对象间只有(正向作用)。
P2A.反馈作用B.前馈作用C.正向作用D.反向作用2.闭环控制系统的主反馈取自(被控对象输出端)。
P3A.给定输入端B.干扰输入端C.控制器输出端D.系统输出端3.闭环系统在其控制器和被控对象之间有(反向作用)。
P3A.反馈作用B.前馈作用C.正向作用D.反向作用A.输入量B.输出量C.反馈量D.干扰量4.自动控制系统的控制调节过程是以偏差消除(偏差的过程)。
P2-3A.偏差的过程B.输入量的过程C.干扰量的过程D.稳态量的过程5.一般情况下开环控制系统是(稳定系统)。
P2A.不稳定系统B.稳定系统C.时域系统D.频域系统6.闭环控制系统除具有开环控制系统所有的环节外,还必须有(B)。
p5A.给定环节B.比较环节C.放大环节D.执行环节7.闭环控制系统必须通过(C)。
p3A.输入量前馈参与控制B.干扰量前馈参与控制C.输出量反馈到输入端参与控制D.输出量局部反馈参与控制8.随动系统要求系统的输出信号能跟随(C的变化)。
P6A.反馈信号B.干扰信号C.输入信号D.模拟信号9.若反馈信号与原系统输入信号的方向相反则为(负反馈)。
P3A.局部反馈B.主反馈C.正反馈D.负反馈10.输出量对系统的控制作用没有影响的控制系统是(开环控制系统)。
P2A.开环控制系统B.闭环控制系统C.反馈控制系统D.非线性控制系统11.自动控制系统的反馈环节中一般具有(B )。
p5A..给定元件B.检测元件C.放大元件D.执行元件12. 控制系统的稳态误差反映了系统的〔 B 〕p8A. 快速性B.准确性C. 稳定性D.动态性13.输出量对系统的控制作用有直接影响的系统是(B )p3A.开环控制系统B.闭环控制系统C.线性控制系统D.非线性控制系统14.通过动态调节达到稳定后,被控量与期望值一致的控制系统为(无差系统)。
控制工程基础应掌握的重要知识点控制工程是一门研究控制系统及其应用的理论和方法的学科。
其核心任务是通过对被控对象以及环境的监测和测量,对系统进行控制和调节,以达到预期的控制效果。
以下是控制工程基础中应掌握的重要知识点:1.连续系统与离散系统:控制系统可以分为连续系统和离散系统。
连续系统是指系统变量是连续变化的,通常使用微分方程描述。
离散系统是指系统变量是离散变化的,通常使用差分方程描述。
掌握连续系统与离散系统的建模与分析方法是控制工程的基础。
2.传递函数与状态空间模型:传递函数描述了系统输入与输出之间的关系,是一个复频域函数。
状态空间模型则是通过描述系统的状态量对时间的导数来建模。
掌握传递函数的提取与描述以及状态空间模型的建立与分析方法是进行系统分析与控制设计的基础。
3.控制系统的基本性能指标:控制系统的基本性能指标包括稳定性、快速性、精确性和抗干扰性。
稳定性是系统在受到干扰或参数变化时保持状态有界的能力;快速性是系统输出快速收敛到期望值的能力;精确性是系统输出与期望值之间的偏差大小;抗干扰性是系统对干扰的敏感性。
掌握这些性能指标的衡量方法是控制系统设计的基础。
4.反馈控制原理:反馈控制是一种常用的控制方式,通过对系统输出进行测量并与期望输出进行比较,根据差值来修正输入以调节系统行为。
掌握反馈控制的原理,包括比例控制、积分控制和微分控制的组合应用是进行控制系统设计和分析的关键。
5.PID控制器:PID控制器是一种基于比例、积分和微分操作的控制器。
它能够通过调整三个参数来适应不同的系统需要,并具有较好的稳定性和快速性能。
掌握PID控制器的设计和调节方法是控制工程的重要内容。
6.控制系统的稳定性分析与设计:稳定性是控制系统的基本要求。
控制系统的稳定性分析包括对开环传递函数的极点位置、稳定裕量、相角裕量等指标的评估。
稳定性设计则是通过修改系统参数或者设计合适的控制器来保证系统的稳定性。
掌握稳定性分析与设计的方法是进行控制系统设计的重要基础。
第7章系统的性能分析与校正控制系统良好的稳定性是其正常工作的必要条件,在进行系统设计时往往发现设计出来的系统不能满足指标的预期要求,且有时相互矛盾。
如当提高系统的稳定精度时,其稳定性下降;反之系统有了足够稳定性时,精度又可能达不到要求,这就要求调整系统中原有的某些参数,或者在原系统中加入某些环节使其全面满足给定的设计指标要求。
7.1 频域性能指标与时域性能指标关系一个控制系统可以分为被控制对象和控制器两大部分。
被控制对象包括了执行器,它是推动负载对象的基本部分,其结构在全工作过程中,结构形式和参数属于不可变的,通常称为系统的固有部分;如何设计出一个符合系统的性能指标要求的控制器,成为反馈控制系统研究的重要内容。
这一节侧重讨论系统性能指标,根据性能指标设计控制器将在本章中讨论。
控制系统的性能包括稳定性、快速性、准确性、抗干扰能力。
分别从以下五个方面说明:(1) 稳定性指在干扰去除后,系统恢复原有工作状态的能力。
稳定性与惯性不同,惯性是系统试图保持原有运动状态的能力。
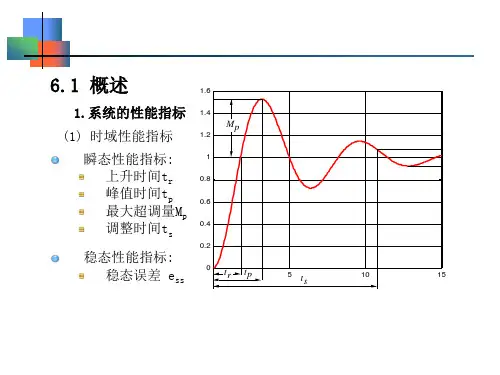
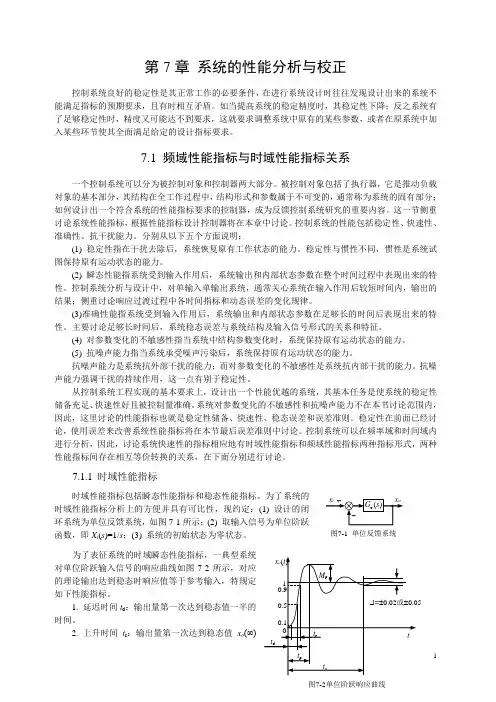
(2) 瞬态性能指系统受到输入作用后,系统输出和内部状态参数在整个时间过程中表现出来的特性。
控制系统分析与设计中,对单输入单输出系统,通常关心系统在输入作用后较短时间内,输出的结果;侧重讨论响应过渡过程中各时间指标和动态误差的变化规律。
(3)准确性能指系统受到输入作用后,系统输出和内部状态参数在足够长的时间后表现出来的特性。
主要讨论足够长时间后,系统稳态误差与系统结构及输入信号形式的关系和特征。
(4) 对参数变化的不敏感性指当系统中结构参数变化时,系统保持原有运动状态的能力。
(5) 抗噪声能力指当系统承受噪声污染后,系统保持原有运动状态的能力。
抗噪声能力是系统抗外部干扰的能力;而对参数变化的不敏感性是系统抗内部干扰的能力。
抗噪声能力强调干扰的持续作用,这一点有别于稳定性。
从控制系统工程实现的基本要求上,设计出一个性能优越的系统,其基本任务是使系统的稳定性储备充足、快速性好且被控制量准确。