模拟退火算法报告
- 格式:docx
- 大小:30.60 KB
- 文档页数:8
一、实训背景随着计算机技术的不断发展,优化算法在各个领域得到了广泛应用。
退火算法作为一种重要的全局优化算法,在解决实际问题中具有广泛的前景。
为了更好地理解和掌握退火算法,本次实训以模拟退火算法(Simulated Annealing,SA)为例,通过编程实现该算法,并应用于实际问题的求解。
二、实训目的1. 理解退火算法的基本原理和原理;2. 掌握模拟退火算法的编程实现;3. 将退火算法应用于实际问题,提高算法的实际应用能力;4. 分析算法的优缺点,为后续研究提供参考。
三、实训内容1. 退火算法原理退火算法是一种基于概率的优化算法,模拟了固体退火过程。
在固体退火过程中,当温度逐渐降低时,晶体的结构会变得更加稳定。
退火算法借鉴这一原理,通过在搜索过程中引入温度参数,使算法能够在一定概率下跳出局部最优解,从而找到全局最优解。
2. 模拟退火算法实现本次实训采用Python编程语言实现模拟退火算法。
算法流程如下:(1)初始化参数:设定初始温度T0、终止温度Tmin、温度下降率α、迭代次数maxIter;(2)初始化解:随机生成初始解x0;(3)迭代过程:a. 产生新解x_new;b. 计算新旧解之间的目标函数值差Δf;c. 判断Δf是否满足接受准则,若满足,则接受新解,否则以一定概率接受新解;d. 更新当前最优解;e. 降低温度T = α T;f. 判断是否满足终止条件,若满足,则终止迭代,输出最优解;否则,返回步骤(3)。
3. 实际问题应用本次实训以TSP(Traveling Salesman Problem,旅行商问题)为例,将退火算法应用于解决TSP问题。
TSP问题是一个经典的组合优化问题,其目标是找到一条最短的路径,使得旅行商访问所有城市后返回起点。
4. 结果分析通过对TSP问题的求解,可以看出退火算法在解决实际问题时具有较高的效率。
与传统算法相比,退火算法能够找到更优的解,且收敛速度较快。
但在某些情况下,退火算法可能陷入局部最优解,需要调整算法参数或采用其他方法进行改进。
模拟退火算法机理研究一、本文概述《模拟退火算法机理研究》这篇文章旨在深入探讨模拟退火算法的工作原理、应用场景以及优化策略。
模拟退火算法是一种广泛应用于优化问题的元启发式搜索算法,其灵感来源于物理学中的退火过程。
通过模拟固体退火过程中的物理行为,算法能够在搜索空间内有效地寻找全局最优解,避免了过早陷入局部最优的困境。
本文将首先介绍模拟退火算法的基本概念和发展历程,然后详细分析其算法流程和关键参数,接着探讨算法在各类优化问题中的应用实例,最后提出针对模拟退火算法的优化策略和改进方法,以期提高算法的性能和效率。
通过本文的研究,读者可以更深入地理解模拟退火算法的原理和应用,为相关领域的研究和实践提供有益的参考。
二、模拟退火算法基本原理模拟退火算法(Simulated Annealing Algorithm,简称SA)是一种启发式随机搜索过程,其灵感来源于物理学中的退火过程。
在物理学中,退火是一种优化材料的物理特性的过程,通过缓慢降低材料的温度,使其内部能量达到最小值,从而达到稳定状态。
模拟退火算法借鉴了这种物理过程,将其应用于解决组合优化问题。
初始化:算法选择一个初始解作为当前解,并设定一个初始温度(通常是一个较高的值)以及一系列的温度降低参数,如降温速率和终止温度。
邻域搜索:在当前解的邻域内随机选择一个新解,计算新解的目标函数值并与当前解进行比较。
如果新解更优(即目标函数值更小),则接受新解作为当前解;否则,以一定的概率接受较差的新解,这个概率随着温度的降低而逐渐减小。
温度更新:根据设定的降温参数,降低当前温度。
这个过程模拟了物理退火过程中的温度降低。
重复过程:重复执行邻域搜索和温度更新步骤,直到达到终止条件(如温度降至预设的终止温度或连续多次迭代未找到更优解)。
通过模拟退火算法,可以在搜索过程中避免过早陷入局部最优解,而是以一定的概率接受较差的解,从而有机会跳出局部最优解,寻找全局最优解。
这种特性使得模拟退火算法在解决许多复杂的组合优化问题上表现出良好的性能。
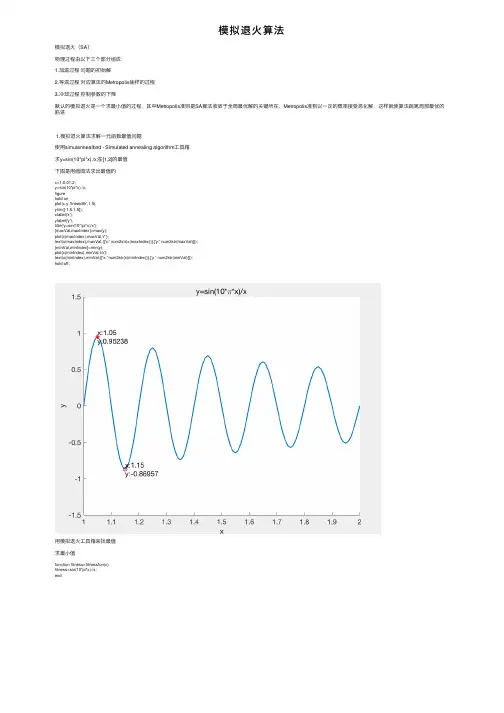
模拟退⽕算法模拟退⽕(SA)物理过程由以下三个部分组成1.加温过程问题的初始解2.等温过程对应算法的Metropolis抽样的过程3.冷却过程控制参数的下降默认的模拟退⽕是⼀个求最⼩值的过程,其中Metropolis准则是SA算法收敛于全局最优解的关键所在,Metropolis准则以⼀定的概率接受恶化解,这样就使算法跳离局部最优的陷进1.模拟退⽕算法求解⼀元函数最值问题使⽤simulannealbnd - Simulated annealing algorithm⼯具箱求y=sin(10*pi*x)./x;在[1,2]的最值下图是⽤画图法求出最值的x=1:0.01:2;y=sin(10*pi*x)./x;figurehold onplot(x,y,'linewidth',1.5);ylim([-1.5,1.5]);xlabel('x');ylabel('y');title('y=sin(10*\pi*x)/x');[maxVal,maxIndex]=max(y);plot(x(maxIndex),maxVal,'r*');text(x(maxIndex),maxVal,{['x:' num2str(x(maxIndex))],['y:' num2str(maxVal)]});[minVal,minIndex]=min(y);plot(x(minIndex),minVal,'ro');text(x(minIndex),minVal,{['x:' num2str(x(minIndex))],['y:' num2str(minVal)]});hold off;⽤模拟退⽕⼯具箱来找最值求最⼩值function fitness=fitnessfun(x)fitness=sin(10*pi*x)./x;end求最⼤值function fitness=fitnessfun(x)fitness=-sin(10*pi*x)./x;endOptimization running.Objective function value: -0.9527670052175917Maximum number of iterations exceeded: increase options.MaxIterations.⽤⼯具箱求得的最⼤值为0.95276700521759172.⼆元函数优化[x,y]=meshgrid(-5:0.1:5,-5:0.1:5);z=x.^2+y.^2-10*cos(2*pi*x)-10*cos(2*pi*y)+20;figuremesh(x,y,z);hold onxlabel('x');ylabel('y');zlabel('z');title('z=x^2+y^2-10*cos(2*\pi*x)-10*cos(2*\pi*y)+20');maxVal=max(z(:));[maxIndexX,maxIndexY]=find(z==maxVal);%返回z==maxVal时,x和y的索引for i=1:length(maxIndexX)plot3(x(maxIndexX(i),maxIndexY(i)),y(maxIndexX(i),maxIndexY(i)),maxVal,'r*');text(x(maxIndexX(i),maxIndexY(i)),y(maxIndexX(i),maxIndexY(i)),maxVal,{['x:' num2str(x(maxIndexX(i)))] ['y:' num2str(y(maxIndexY(i)))] ['z:' num2str(maxVal)] }); endhold off;function fitness=fitnessfun(x)fitness=-(x(1).^2+x(2).^2-10*cos(2*pi*x(1))-10*cos(2*pi*x(2))+20);endOptimization running.Objective function value: -80.50038894455415Maximum number of iterations exceeded: increase options.MaxIterations.找到的最⼤值:80.500388944554153.解TSP问题(⽤的数据和前⼏天⽤遗传算法写TSP问题的数据⼀致,但是结果⽐遗传算法算出来效果差很多,不知道是不是我写错了,怀疑⼈⽣_(:з」∠)_中。
模拟退火实验报告引言模拟退火是一种通过模拟金属退火过程寻找到达全局最优解的常用优化算法。
它的原理源于金属退火中通过加热和冷却来优化金属的内部结构。
在本次实验中,我们将利用模拟退火算法解决一个常见的旅行商问题(TSP)。
实验目标本次实验主要研究模拟退火算法在解决旅行商问题时的性能表现。
旅行商问题是一个经典的NPC问题,其目标是找到一条路径,使得旅行商走过所有城市并返回出发点,同时使得路径长度最短。
实验步骤1. 初始化路径:随机生成一条初始路径,即一个城市序列。
2. 计算路径长度:根据生成的路径计算路径长度,作为初始长度。
3. 开始模拟退火迭代:- 3.1 随机选取两个位置,并交换这两个位置上的城市。
- 3.2 计算新路径的长度。
- 3.3 判断是否接受新路径:- 若新路径长度更短,则接受新路径。
- 若新路径长度更长,则以一定概率接受新路径,概率计算公式为e^{\frac{{len_{new} - len_{old}}}{{t}}},其中t为控制接受概率的参数。
- 3.4 更新路径长度和最优路径。
- 3.5 降低参数t 的值,逐步降低接受概率。
- 3.6 重复步骤3.1 - 3.5,直到满足停止条件。
4. 输出结果:得到最优路径及其长度。
实验结果在本次实验中,我们基于模拟退火算法对一个10个城市的旅行商问题进行求解。
初始路径的生成过程中,我们采用了随机的方式。
实验的停止条件设置为当连续50个迭代中最优路径长度没有更新时,算法停止。
经过多次实验,我们得到了以下结果:最优路径长度为367,路径为[3, 1, 8, 6, 10, 5, 7, 9, 4, 2]。
以下是每次迭代的路径长度变化折线图:从图中可以看出,初始路径的长度较大,但随着迭代的进行,路径长度逐渐降低,并在某个局部最优点附近震荡。
最后,算法找到了一条全局最优路径。
结论模拟退火算法是一种通过模拟金属退火过程寻找全局最优解的优化算法。
模拟退火算法模拟退火算法3.5 模拟退火算法模拟退火算法来源于固体退火原理,将固体加温至充分高,再让其徐徐冷却,加温时,固体内部粒子随温升变为无序状,内能增大,而徐徐冷却时粒子渐趋有序,在每个温度都达到平衡态,最后在常温时达到基态,内能减为最小。
根据Metropolis准则,粒子在温度T时趋于平衡的概率为e-ΔE/(kT),其中E为温度T时的内能,ΔE为其改变量,k为Boltzmann常数。
用固体退火模拟组合优化问题,将内能E模拟为目标函数值f,温度T演化成控制参数t,即得到解组合优化问题的模拟退火算法:由初始解i和控制参数初值t开始,对当前解重复“产生新解→计算目标函数差→接受或舍弃”的迭代,并逐步衰减t 值,算法终止时的当前解即为所得近似最优解,这是基于蒙特卡罗迭代求解法的一种启发式随机搜索过程。
退火过程由冷却进度表(Cooling Schedule)控制,包括控制参数的初值t及其衰减因子Δt、每个t值时的迭代次数L和停止条件S。
3.5.1 模拟退火算法的模型模拟退火算法可以分解为解空间、目标函数和初始解三部分。
模拟退火的基本思想:(1) 初始化:初始温度T(充分大),初始解状态S(是算法迭代的起点),每个T值的迭代次数L(2) 对k=1,……,L做第(3)至第6步:(3) 产生新解S′(4) 计算增量Δt′=C(S′)-C(S),其中C(S)为评价函数(5) 若Δt′<0则接受S′作为新的当前解,否则以概率exp(-Δt′/T)接受S′作为新的当前解.(6) 如果满足终止条件则输出当前解作为最优解,结束程序。
终止条件通常取为连续若干个新解都没有被接受时终止算法。
(7) T逐渐减少,且T->0,然后转第2步。
算法对应动态演示图:模拟退火算法新解的产生和接受可分为如下四个步骤:第一步是由一个产生函数从当前解产生一个位于解空间的新解;为便于后续的计算和接受,减少算法耗时,通常选择由当前新解经过简单地变换即可产生新解的方法,如对构成新解的全部或部分元素进行置换、互换等,注意到产生新解的变换方法决定了当前新解的邻域结构,因而对冷却进度表的选取有一定的影响。
模拟退火算法改进综述及参数探究一、概述1. 模拟退火算法简介模拟退火算法(Simulated Annealing,SA)是一种基于物理退火过程的随机优化算法,最早由_______等人于1953年提出,后经_______等人在1983年成功引入组合优化领域。
其核心思想借鉴了固体物质在退火过程中的物理特性,即在加温时,固体内部粒子随温升变为无序状,内能增大而在徐徐冷却时,粒子逐渐变得有序,最终在常温时达到内能最小的基态。
模拟退火算法通过模拟这一过程,在解空间中随机搜索目标函数的全局最优解。
算法从某一较高初温出发,伴随温度参数的不断下降,结合概率突跳特性在解空间中随机寻找目标函数的全局最优解。
在模拟退火过程中,算法以某种概率接受较差的解,从而具有跳出局部最优解的能力。
只要计算时间足够长,模拟退火法可以保证以概率0收敛于全局最优点。
在实际应用中,由于计算速度和时间限制,其优化效果和计算时间存在矛盾,收敛时间往往过长。
模拟退火算法因其通用性和概率全局优化性能,在工程实践中得到了广泛应用,如VLSI布局问题、生产调度、控制工程、机器学习、神经网络、信号处理等领域。
通过模拟退火算法,可以有效地解决各种复杂的组合优化问题,提高求解的效率和精度。
近年来,随着算法优化领域的发展,模拟退火算法也在不断改进和完善。
研究者通过改进算法的参数设置和冷却策略,提高算法的收敛速度和全局搜索能力另一方面,将模拟退火算法与其他优化算法相结合,形成混合优化算法,以进一步提升算法的性能和适用范围。
在接下来的章节中,我们将对模拟退火算法的改进方法和参数探究进行详细的综述和分析,以期为读者提供更深入的理解和更高效的应用策略。
2. 模拟退火算法的应用领域在组合优化问题中,模拟退火算法具有显著的优势。
这类问题包括旅行商问题、背包问题、调度问题等,它们都属于NP难问题,难以在多项式时间内找到最优解。
模拟退火算法通过模拟物理退火过程,能够在可接受的时间内找到近似最优解,因此在这些领域得到了广泛应用。
模拟退火算法程序全文共四篇示例,供读者参考第一篇示例:模拟退火算法(Simulated Annealing)是一种基于蒙特卡洛方法的优化算法,常用来解决组合优化问题。
它通过模拟固体退火的过程,在搜索空间中寻找全局最优解。
模拟退火算法的思想来源于固体退火的过程,即通过在高温下加热固体,然后慢慢冷却直至达到平衡状态,从而达到最低能量状态。
在这个过程中,固体的分子不断变化,最终找到最稳定的状态。
模拟退火算法可以看作是启发式的局部搜索算法,能够避免陷入局部最优解。
它以一定的概率接受劣解,从而跳出局部最优解,继续搜索全局最优解。
模拟退火算法的核心思想是通过接受受限制的劣解来避免搜索陷入局部最优解,以较小的概率接受较大的能量差,随着搜索的进行逐渐降低概率。
在搜索空间内随机选择一个新解,并计算它与当前解之间的差异,如果新解的目标函数值更优,则接受该解作为当前解;否则以一定的概率接受该解。
模拟退火算法的基本步骤如下:1. 初始化温度T、初始解X、目标函数值f(X);2. 在当前温度下,生成一个候选解Y;3. 计算候选解Y的目标函数值f(Y)与当前解X的目标函数值f(X)之间的差异ΔE;4. 如果ΔE < 0,则接受候选解Y作为当前解X;5. 如果ΔE > 0,则以一定的概率接受候选解Y:- 如果概率P > 随机数r,则接受候选解Y;- 如果概率P ≤ 随机数r,则拒绝候选解Y,保持当前解X不变;6. 降低温度T,重复步骤2~5直至达到停止条件。
在实际应用中,模拟退火算法常常用于解决组合优化问题,如旅行商问题(TSP)、车间调度问题、布尔函数优化等。
通过适当的参数设置和调整,模拟退火算法可以在较短的时间内找到较优解,从而提高问题求解的效率和精度。
下面我们通过一个简单的例子来演示模拟退火算法的实现过程。
假设我们有一个一维数组,要求找到使得数组元素之和最接近给定目标值的一组解。
我们可以用模拟退火算法来解决这个问题。

算法报告一、课题名称一种用于生物网络中最多公共边子图检测的模拟退火算法二、实验目的介绍了一种用于多重最多公共边子图问题的启发式算法,它能够有效地检测出在多个真实世界大小的网络上共享的大型公共子结构。
三、实验环境∙现代C ++编译器支持C ++ 11和OpenMP∙make∙CMake> = 2.8∙Boost标题∙help2man(可选,用于手册页生成)四、实验主要步骤安装所有以上环境后,运行以下命令:或者,您可以安装二进制文件和文档:要对齐三个图表,运行600秒:最大公共子图将被写入文件mcs.gw,顶点对齐表将被写入alignment.txt。
五、实验核心代码#include <sailmcs/ls/Best.hpp>#include <algorithm>#include <random>#include <sailmcs/ls/Common.hpp>namespace ublas = boost::numeric::ublas;namespace sailmcs {namespace ls {void Best::localSearch(const std::vector<Graph> &graphs,Solution &solution) {size_t m = solution.alignment.size1();size_t n = solution.alignment.size2();// Create reverse alignment mappingstd::vector<std::vector<size_t>> map;create_map(graphs, solution, map);// Count number of graphs each edge is covered inedge_count_matrix edges;count_edges(graphs, map, solution, edges);// Build neighbor listsstd::vector<neighbor_list> neighbors;create_neighbor_lists(graphs, map, solution, neighbors);// Active index mapstd::vector<int> active(m, 0);std::random_device rd;std::minstd_rand rand_gen(rd());int iteration = 0;bool repeat;do {repeat = false;for(size_t g = 0; g < n-1; ++g) {int best_delta = 0;size_t best_i = 0;size_t best_j = 0;#pragma omp parallel{int prv_best_delta = 0;size_t prv_best_i = 0;size_t prv_best_j = 0;#pragma omp for schedule(static, 1)for(size_t i = 0; i < m; ++i) {for(size_t j = i+1; j < m; ++j) {if(active[i] < iteration && active[j] < iteration) continue;int delta = get_delta(i, j, g, neighbors, edges);if(delta > 0) {active[i] = iteration+1;active[j] = iteration+1;}if(delta > prv_best_delta) {prv_best_delta = delta;prv_best_i = i;prv_best_j = j;}}}#pragma omp critical{if(prv_best_delta > best_delta) {best_delta = prv_best_delta;best_i = prv_best_i;best_j = prv_best_j;}}}if(best_delta > 0) {repeat = true;swap(best_i, best_j, g, iteration, neighbors, edges, solution, active);}}iteration++;} while(repeat);// Extract LCS and solution qualityfinalize(edges, solution);}}}六、实验数据部分数据如下:50个顶点的数据LEDA.GRAPHstringstring-250|{0}||{2}| |{3}| |{36}| |{37}| |{6}| |{33}| |{41}| |{10}| |{7}| |{12}| |{16}| |{22}| |{29}| |{30}| |{31}| |{48}| |{4}| |{5}| |{40}| |{43}| |{34}| |{19}| |{23}| |{24}| |{26}| |{27}| |{25}| |{11}| |{44}| |{14}| |{15}| |{17}| |{46}| |{47}| |{32}| |{8}| |{9}| |{42}| |{13}| |{18}| |{20}| |{35}| |{38}||{28}||{45}||{49}||{39}|701 2 0 |{?}| 1 3 0 |{?}| 1 4 0 |{?}| 1 5 0 |{?}| 1 6 0 |{?}| 1 7 0 |{?}| 1 8 0 |{?}| 1 9 0 |{?}| 1 10 0 |{?}| 1 11 0 |{?}| 1 12 0 |{?}| 1 13 0 |{?}| 1 14 0 |{?}| 1 15 0 |{?}| 1 16 0 |{?}|1 17 0 |{?}|2 3 0 |{?}| 2 4 0 |{?}| 2 12 0 |{?}| 2 13 0 |{?}| 2 18 0 |{?}| 2 19 0 |{?}| 2 20 0 |{?}| 2 21 0 |{?}| 2 22 0 |{?}| 2 23 0 |{?}| 2 24 0 |{?}| 2 25 0 |{?}| 2 26 0 |{?}| 2 27 0 |{?}|2 28 0 |{?}|3 29 0 |{?}|4 19 0 |{?}| 4 20 0 |{?}| 7 19 0 |{?}|7 42 0 |{?}|8 19 0 |{?}| 10 44 0 |{?}|11 20 0 |{?}|11 26 0 |{?}|13 14 0 |{?}|13 19 0 |{?}|13 20 0 |{?}|14 20 0 |{?}|15 41 0 |{?}|19 20 0 |{?}|19 25 0 |{?}|19 30 0 |{?}|19 31 0 |{?}|19 32 0 |{?}|19 33 0 |{?}|19 34 0 |{?}|19 35 0 |{?}|19 36 0 |{?}|20 24 0 |{?}|20 26 0 |{?}|20 37 0 |{?}|20 38 0 |{?}|20 39 0 |{?}|20 40 0 |{?}|20 41 0 |{?}|20 42 0 |{?}|20 43 0 |{?}|24 26 0 |{?}|26 47 0 |{?}|27 48 0 |{?}|28 49 0 |{?}|28 50 0 |{?}|32 45 0 |{?}|42 46 0 |{?}|七、实验结果实验部分数据输出如下:(含截图)八、实验中的问题。
模拟退火算法一定义1 概念什么是退火?在热力学上,退火现象指物体逐渐降温的物理现象,温度愈低,物体的能量状态会低;够低后,液体开始冷凝与结晶,在结晶状态时,系统的能量状态最低。
大自然在缓慢降温(亦即,退火)时,可“找到”最低能量状态:结晶。
但是,如果过程过急过快,快速降温(亦称「淬炼」)时,会导致不是最低能态的非晶形。
如下图所示,首先(左图)物体处于非晶体状态。
我们将固体加温至充分高(中图),再让其徐徐冷却,也就退火(右图)。
加温时,固体内部粒子随温升变为无序状,内能增大,而徐徐冷却时粒子渐趋有序,在每个温度都达到平衡态,最后在常温时达到基态,内能减为最小(此时物体以晶体形态呈现)。
似乎,大自然知道慢工出细活:缓缓降温,使得物体分子在每一温度时,能够有足够时间找到安顿位置,则逐渐地,到最后可得到最低能态,系统最安稳。
模拟退火算法(SA)最早的思想是由N. Metropolis 等人于1953年提出。
1983 年,S. Kirkpatrick 等成功地将退火思想引入到组合优化领域。
它是基于Monte-Carlo迭代求解策略的一种随机寻优算法,其出发点是基于物理中固体物质的退火过程与一般组合优化问题之间的相似性。
模拟退火算法从某一较高初温出发,伴随温度参数的不断下降,结合概率突跳特性在解空间中随机寻找目标函数的全局最优解,即在局部最优解能概率性地跳出并最终趋于全局最优。
模拟退火其实也是一种贪心算法,但是它的搜索过程引入了随机因素。
在迭代更新可行解时,以一定的概率来接受一个比当前解要差的解,因此有可能会跳出这个局部的最优解,达到全局的最优解。
以下图为例,假定初始解为左边蓝色点A ,模拟退火算法会快速搜索到局部最优解B ,但在搜索到局部最优解后,不是就此结束,而是会以一定的概率接受到左边的移动。
也许经过几次这样的不是局部最优的移动后会到达全局最优点D ,于是就跳出了局部最小值。
根据热力学的原理,在温度为T 时,出现能量差dE 的降温的概率为P(dE),表示为: ()⎪⎭⎫ ⎝⎛=kT dE E P ex p d 。
一. 爬山算法( Hill Climbing )介绍模拟退火前,先介绍爬山算法。
爬山算法是一种简单的贪心搜索算法,该算法每次从当前解的临近解空间中选择一个最优解作为当前解,直到达到一个局部最优解。
爬山算法实现很简单,其主要缺点是会陷入局部最优解,而不一定能搜索到全局最优解。
如图1所示:假设C点为当前解,爬山算法搜索到A点这个局部最优解就会停止搜索,因为在A点无论向那个方向小幅度移动都不能得到更优的解。
图1二. 模拟退火(SA,Simulated Annealing)思想爬山法是完完全全的贪心法,每次都鼠目寸光的选择一个当前最优解,因此只能搜索到局部的最优值。
模拟退火其实也是一种贪心算法,但是它的搜索过程引入了随机因素。
模拟退火算法以一定的概率来接受一个比当前解要差的解,因此有可能会跳出这个局部的最优解,达到全局的最优解。
以图1为例,模拟退火算法在搜索到局部最优解A后,会以一定的概率接受到E的移动。
也许经过几次这样的不是局部最优的移动后会到达D点,于是就跳出了局部最大值A。
模拟退火算法描述:若J( Y(i+1) )>= J( Y(i) ) (即移动后得到更优解),则总是接受该移动若J( Y(i+1) )< J( Y(i) ) (即移动后的解比当前解要差),则以一定的概率接受移动,而且这个概率随着时间推移逐渐降低(逐渐降低才能趋向稳定)这里的“一定的概率”的计算参考了金属冶炼的退火过程,这也是模拟退火算法名称的由来。
根据热力学的原理,在温度为T时,出现能量差为dE的降温的概率为P(dE),表示为:P(dE) = exp( dE/(kT) )其中k是一个常数,exp表示自然指数,且dE<0。
这条公式说白了就是:温度越高,出现一次能量差为dE的降温的概率就越大;温度越低,则出现降温的概率就越小。
又由于dE总是小于0(否则就不叫退火了),因此dE/kT < 0 ,所以P(dE)的函数取值范围是(0,1) 。
模拟退火算法参数1. 引言模拟退火算法是一种基于物理退火过程的随机优化算法,起源于物理学中的固体物理领域。
随着计算机技术的不断发展,在各个领域中得到了广泛的应用,如最优化问题、图论、组合优化等。
在模拟退火算法中,其优化过程就是一个随机“走山”过程,通过控制温度来决定搜寻方向,从而获得全局最优解。
因此,在使用模拟退火算法时,不同参数的设置会对整个算法的结果产生重要影响,本文将会对模拟退火算法中的参数进行探讨和分析。
2. 参数说明模拟退火算法的三个主要参数是初始温度、降温速率和终止温度,下面分别进行介绍。
初始温度初始温度是指模拟退火算法开始时的温度大小。
初始温度应该足够高,以便算法能够跳出当前局部最优解进入到全局最优解的搜索空间。
但如果初始温度过高,则可能会造成算法的不稳定性,使其无法达到全局最优解。
那么如何设置初始温度呢?通常的做法是通过试验,逐步增加初始温度,直到算法在较短时间内可以找到较优解。
理论上,初始温度越大,算法越容易发现更优解,但也会增加算法的运行时间和内存消耗。
降温速率降温速率是指模拟退火算法中温度降低的速度,这是控制算法搜索速度的关键参数。
降温速率越小,算法搜索的步骤越多,但时间也越长;降温速率越大,算法搜索步骤较少,但搜索的深度可能不够。
降温速率的选择应该适当,一般是根据问题的复杂程度来进行选择。
对于相对简单的问题,可以适当加快降温速率,而对于比较复杂的问题,则应该选择较慢的降温速率。
终止温度终止温度是指模拟退火算法搜索过程中最终允许的温度。
当算法达到终止温度时,算法退火结束,产生的解即为最优解,此时不进行搜索。
通常,终止温度应该足够低,以确保搜索空间充分被搜寻到。
终止温度的大小一般取决于问题的复杂性和降温速率的选择。
较高的终止温度会导致算法没有足够的时间来搜索全局最优解,而较低的终止温度会使算法更容易落入局部最优解。
3. 参数调整方法对于模拟退火算法,参数的选择不同会对算法的收敛和优化结果产生重大影响。
模拟退火算法一 定义1 概念 什么是退火?在热力学上,退火现象指物体逐渐降温的物理现象,温度愈低,物体的能量状态会低;够低后,液体开始冷凝与结晶,在结晶状态时,系统的能量状态最低。
大自然在缓慢降温(亦即,退火)时,可“找到”最低能量状态:结晶。
但是,如果过程过急过快,快速降温(亦称「淬炼」)时,会导致不是最低能态的非晶形。
如下图所示,首先(左图)物体处于非晶体状态。
我们将固体加温至充分高(中图),再让其徐徐冷却,也就退火(右图)。
加温时,固体内部粒子随温升变为无序状,内能增大,而徐徐冷却时粒子渐趋有序,在每个温度都达到平衡态,最后在常温时达到基态,内能减为最小(此时物体以晶体形态呈现)。
似乎,大自然知道慢工出细活:缓缓降温,使得物体分子在每一温度时,能够有足够时间找到安顿位置,则逐渐地,到最后可得到最低能态,系统最安稳。
模拟退火算法(SA)最早的思想是由N. Metropolis 等人于1953年提出。
1983 年,S. Kirkpatrick 等成功地将退火思想引入到组合优化领域。
它是基于Monte-Carlo 迭代求解策略的一种随机寻优算法,其出发点是基于物理中固体物质的退火过程与一般组合优化问题之间的相似性。
模拟退火算法从某一较高初温出发,伴随温度参数的不断下降,结合概率突跳特性在解空间中随机寻找目标函数的全局最优解,即在局部最优解能概率性地跳出并最终趋于全局最优。
模拟退火其实也是一种贪心算法,但是它的搜索过程引入了随机因素。
在迭代更新可行解时,以一定的概率来接受一个比当前解要差的解,因此有可能会跳出这个局部的最优解,达到全局的最优解。
以下图为例,假定初始解为左边蓝色点A ,模拟退火算法会快速搜索到局部最优解B ,但在搜索到局部最优解后,不是就此结束,而是会以一定的概率接受到左边的移动。
也许经过几次这样的不是局部最优的移动后会到达全局最优点D ,于是就跳出了局部最小值。
根据热力学的原理,在温度为T 时,出现能量差dE 的降温的概率为P(dE),表示为: ()⎪⎭⎫ ⎝⎛=kT dE E P ex p d 。
其中k 是波尔兹曼常数,值为-2310×13)1.3806488(=k ,exp 表示自然指数,且dE<0。
因此dE/kT<0,所以P(dE)函数的取值范围是(0,1)。
满足概率密度函数的定义。
其实这条公式更直观意思就是:温度越高,出现一次能量差为P(dE)的降温的概率就越大;温度越低,则出现降温的概率就越小。
在实际问题中,这里的“一定的概率”的计算参考了金属冶炼的退火过程。
假定当前可行解为x ,迭代更新后的解为x_new ,那么对应的“能量差”定义为:()()x f new x f f -=∆_,其对应的一定概率为:2 SA 算法基本要素(1) 状态空间与状态产生函数1)搜索空间也称为状态空间,它由经过编码的可行解的集合组成。
2) 2)状态产生函数(邻域函数)应尽可能保证产生的候选解遍布全部解空间。
通常由两部分组成,即产生候选解的方式和候选解产生的概率分布。
3) 3)候选解一般采用按照某一概率密度函数对解空间进行随机采样来获得。
4) 4)概率分布可以是均匀分布、正态分布、指数分布等。
(2) 状态转移概率1)状态转移概率是指从一个状态向另一个状态的转移概率。
2) 2)通俗的理解是接受一个新解为当前解的概率。
3) 3)它与当前的温度参数T 有关,随温度下降而减小。
4) 4)一般采用Metropolis 准则。
(3) 内循环终止准则也称Metropolis 抽样稳定准则,用于决定在各温度下产生候选解的数目。
常用的抽样稳定准则包括:1)检验目标函数的均值是否稳定。
2)连续若干步的目标值变化较小。
3)按一定的步数抽样。
(4) 外循环终止准则即算法终止准则,常用的包括:1)设置终止温度的阈值。
2)设置外循环迭代次数。
3)算法搜索到的最优值连续若干步保持不变。
4)检验系统熵是否稳定。
3 算法步骤(1) 初始化:初始温度T (充分大),温度下限Tmin (充分小),初始解状态x(是算法迭代的起点),每个T 值的迭代次数L ;(2) 对l=1,2,...,L 做第(3)至第(6)步;(3) 产生新解x_new: ( x_new = x + Δx );(4) 利计算增量Δf=f(x_new)−f(x),其中f(x)为优化目标;(5) 若Δf < 0 (若寻找最小值,Δf > 0)则接受x_new 作为新的当前解,否则以概率⎪⎭⎫ ⎝⎛∆-kT f ex p 接受x_new 作为新的当前解; (6) 如果满足终止条件则输出当前解作为最优解,结束程序。
(终止条件通常取为连续若干个新解都没有被接受时终止算法。
);(7) T 逐渐减少,且T>Tmin ,然后转第(2)步。
4 SA 算法的优缺点SA 算法很容易找到最优解,但是参数难以控制,不能保证一次就收敛到最优值,一般需要多次尝试才能获得(大部分情况下还是会陷入局部最优值)。
观察模拟退火算法的过程,发现其主要存在如下三个参数问题:(1) 温度T 的初始值设置问题温度T 的初始值设置是影响模拟退火算法全局搜索性能的重要因素之一、初始温度高,则搜索到全局最优解的可能性大,但因此要花费大量的计算时间;反之,则可节约计算时间,但全局搜索性能可能受到影响。
(2) 退火速度问题,即每个T 值的迭代次数模拟退火算法的全局搜索性能也与退火速度密切相关。
一般来说,同一温度下的“充分”搜索是相当必要的,但这也需要计算时间。
循环次数增加必定带来计算开销的增大。
(3) 温度管理问题温度管理问题也是模拟退火算法难以处理的问题之一。
实际应用中,由于必须考虑计算复杂度的切实可行性等问题,常采用如下所示的降温方式:()1,0,∈⨯=ααT T ,为了保证较大的搜索空间,α一般取接近于1的值,如0.95、0.9。
5 SA 算法的改进(1)设计合适的状态产生函数,使其根据搜索进程的需要表现出状态的全空间分散性或局部区域性;(2) (2)设计高效的退火策略;(3) (3)避免状态的迂回搜索;(4) (4)采用并行搜索结构;(5) (5)为避免陷入局部极小,改进对温度的控制方式;(6) (6)选择合适的初始状态;(7) (7)设计合适的算法终止准则。
也可通过增加某些环节而实现对模拟退火算法的改进。
主要的改进方式包括:(1) 增加升温或重升温过程。
在算法进程的适当时机,将温度适当提高,从而可激活各状态的接受概率,以调整搜索进程中的当前状态,避免算法在局部极小解处停滞不前。
(2) 增加记忆功能。
为避免搜索过程中由于执行概率接受环节而遗失当前遇到的最优解,可通过增加存储环节,将一些在这之前好的态记忆下来。
(3) 增加补充搜索过程。
即在退火过程结束后,以搜索到的最优解为初始状态,再次执行模拟退火过程或局部性搜索。
(4) 对每一当前状态,采用多次搜索策略,以概率接受区域内的最优状态,而非标准SA的单次比较方式。
(5) 结合其他搜索机制的算法,如遗传算法、混沌搜索等。
(6)上述各方法的综合应用。
二SA算法的应用模拟退火算法的应用很广泛,可以高效地求解NP完全问题,如TSP问题(Travelling Salesman Problem,简记为TSP)、最大截问题(Max Cut Problem)、0-1背包问题(Zero One Knapsack Problem)、图着色问题(Graph Colouring Problem)等等。
模拟退火算法作为一种通用的随机搜索算法,现已广泛用于VLSI设计、图像识别和神经网计算机的研究。
模拟退火算法的应用如下:模拟退火算法作为一种通用的随机搜索算法,现已广泛用于VLSI设计、图像识别和神经网计算机的研究。
模拟退火算法的应用如下:1) 模拟退火算法在VLSI设计中的应用利用模拟退火算法进行VLSI的最优设计,是目前模拟退火算法最成功的应用实例之一。
用模拟退火算法几乎可以很好地完成所有优化的VLSI设计工作。
如全局布线、布板、布局和逻辑最小化等等。
2) 模拟退火算法在神经网计算机中的应用模拟退火算法具有跳出局部最优陷阱的能力。
在Boltzmann机中,即使系统落入了局部最优的陷阱,经过一段时间后,它还能再跳出来,再系统最终将往全局最优值的方向收敛。
3) 模拟退火算法在图像处理中的应用模拟退火算法可用来进行图像恢复等工作,即把一幅被污染的图像重新恢复成清晰的原图,滤掉其中被畸变的部分。
因此它在图像处理方面的应用前景是广阔的。
其中,SA算法在图像处理领域应用比较广泛。
比如:1)SA算法在多阈值图像分割中的应用图像分割是图像处理与计算机视觉领域中最为基础和关键的任务之一,是对图像进行视觉分析和模式识别的前提。
它不仅可以大量压缩数据,减少存储容量,而且能极大地简化后续处理步骤。
在众多图像分割方法中,阈值分割主要利用图像中目标与背景在灰度特征上的差异将图像划分为若干部分。
因实现简单、计算量小、性能较稳定,阈值分割已成为最基本和应用最广泛的分割技术。
1979年日本学者大津提出了最大类间方差法因计算方法简单、自适应强而成为使用最广泛的图像阈值自动选取方法之一。
但传统的Otsu是采用遍历的方式寻找使类间方差最大的阈值T,计算量会随分类数增加呈几何级数增长,这在很大程度上限制了Otsu算法的应用,为了解决多阈值图像分割时最大类间方差法计算量庞大的问题,引入了SA算法,用模拟退火演进代替穷举法搜索最优阈值向量可以使计算量大大减少。
然而为了能够更快地逼近最优值,需要对初始阈值做处理,由直方图提取初始阈值向量的任务分如下三步进行:a) 对直方图进行高斯滤波。
图像的直方图包含了图像的分类信息,但它通常是一条呈现很多微小波峰的不光滑曲线,从原始直方图很难识别和提取出符合应用要求的阈值向量。
b) 计算滤波后的直方图的梯度得并找出直方图的谷点序列,称之为候选阈值点列。
这些点几乎蕴涵了图像的全部分类信息。
那么最大类间方差法的SA算法的目标函数为最大方差:那么SA算法可以找出最优的阈值序列来对图像进行分割。
2)SA算法在超分辨率图像重建中的应用采用传感器对外界图像进行采集传输和变换过程中,由于成像设备自身条件的限制常难以获得高分辨图的图像,而改善成像设备的硬件成本高,短期内技术难以突破、无法应用实践,因此目前主要采用软件技术提高图像的分辨率,改善图像的质量,其中超分辨率重建是一种改善图像质量技术。
而目前应用最广泛的超分辨率重建方法是LLE算法,LLE算法是一种局部线性嵌入算法,它的原理是建设在局部领域内的数据点是线性的,所以领域内任意一点都可由局部近邻点线性表示,其中权值能反映出局部领域的信息,根据这些信息可是这种低维空间仍然保留原高维空间中的几何性质,通过重叠的局部领域得到整体的信息,实质上是在保持原始数据性质不变的情况下,将高维空间的信息映射到低维空间。