S7-1200指令讲解(内部培训教程)
- 格式:ppt
- 大小:15.12 MB
- 文档页数:88


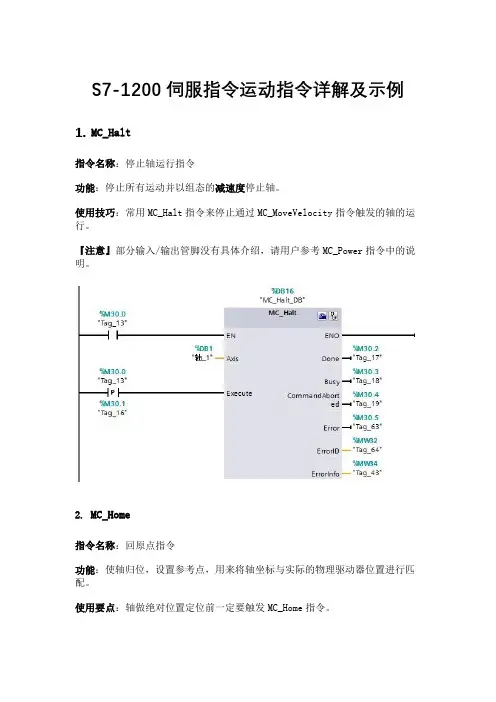
S7-1200伺服指令运动指令详解及示例1. MC_Halt指令名称:停止轴运行指令功能:停止所有运动并以组态的减速度停止轴。
使用技巧:常用MC_Halt指令来停止通过MC_MoveVelocity指令触发的轴的运行。
『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power指令中的说明。
2. MC_Home指令名称:回原点指令功能:使轴归位,设置参考点,用来将轴坐标与实际的物理驱动器位置进行匹配。
使用要点:轴做绝对位置定位前一定要触发MC_Home指令。
『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power指令中的说明。
①Position:位置值•Mode = 1时:对当前轴位置的修正值•Mode = 0,2,3时:轴的绝对位置值②Mode:回原点模式值•Mode = 0:绝对式直接回零点,轴的位置值为参数“Position”的值•Mode = 1:相对式直接回零点,轴的位置值等于当前轴位置 + 参数“Position”的值•Mode = 2:被动回零点,轴的位置值为参数“Position”的值•Mode = 3:主动回零点,轴的位置值为参数“Position”的值下面详细介绍模式0和模式1.Mode = 0绝对式直接回原点以下图为例进行说明。
该模式下的MC_Home指令触发后轴并不运行,也不会去寻找原点开关。
指令执行后的结果是:轴的坐标值更直接新成新的坐标,新的坐标值就是MC_Home指令的“Position”管脚的数值。
例子中,“Position”=0.0mm,则轴的当前坐标值也就更新成了0.0mm。
该坐标值属于“绝对”坐标值,也就是相当于轴已经建立了绝对坐标系,可以进行绝对运动。
『优点』MC_Home的该模式可以让用户在没有原点开关的情况下,进行绝对运动操作。
Mode = 1相对式直接回原点与Mode = 0相同,以该模式触发MC_Home指令后轴并不运行,只是更新轴的当前位置值。

SIMATIC S7-1200编程实例讲讲解(培训)1、TIA 选型工具下载链接:2、熟悉TIA 选型工具的基本操作练习1:TIA 选型工具1、SIMATIC Automation Tool 的下载链接:2、熟悉SAT 的基本操作练习2:SIMATIC Automation Tool1、熟悉TIA Portal 操作界面。
2、自动在线检测S7-1200 PLC 站,并组态,设置CPU 若干属性(如系统脉冲输出信号等)。
3、建立Trace ,并进行相关组态。
4、在线连接CPU ,下载Trace 文件。
5、激活Trace (通过监视表),并在线查看Trace 结果。
6、查看其他在线诊断信息。
练习3:TIA Portal 基本操作练习4:编程基本操作1、SIOS 的示例“Using recipes with S7-1200”链接:2、SIOS 的示例“Process Data Acquisition and Monitoring with SIMATIC S7-1200 (Data Logging)”链接:3、程序中创建一个数据日志文件,并定义相关参数。
4、执行写日志、打开、关闭日志等操作。
5、激活CPU 的Web 服务器,通过IE 浏览器查看CPU 的装载存储区中已创建的数据日志文件。
练习5:S7-1200的配方和数据日志1、运动控制开环控制(高速脉冲输出):组态轴工艺对象;调用执行运动控制指令;Trace 运动控制相关参数。
2、运动控制闭环控制(模拟量输出+编码器反馈):组态轴工艺对象;调用执行运动控制指令等。
练习6:S7-1200的运动控制功能1、 SIOS 的示例“PID Control with PID_Compact (S7-1200)”链接:2、建立PID 工艺对象,并进行相关组态。
3、调用PID 过程仿真块,使用“PID_Compact”控制器编程。
4、进行PID 自动整定等操作。
练习7:S7-1200的PID 功能1、 建立两个CPU 之间的PROFINET IO 通信,其中一个CPU 做I-device 。

西门子PLC S7-1200编程与操作模块五基本指令任务一位逻辑指令【学习目标】1.了解与掌握位逻辑指令的用法。
2.熟练运用指令完成练习。
【相关知识】一、基本位逻辑指令点击“常用指令栏”—“常开,常闭触点”,或者在“基本指令”—位逻辑运算—“常开,常闭触点”添加。
可在“基本指令”—位逻辑运算—“取反”添加。
可在“基本指令”—位逻辑运算—“赋值,赋值取反”添加。
练习(一)、结合上图,完成上面的程序,可以得到如下的功能:当开关S1动作而S2不动作时,在三种情况下指示灯都亮。
注意 !根据它们是用在硬件回路中还是作为软件中的符号,“常开触点”和“常闭触点”有不同的含义。
二、置位复位指令可在“基本指令”—位逻辑运算—“置位输出,复位输出”添加。
可在“基本指令”—位逻辑运算—“置位位域,复位位域”添加。
可在“基本指令”—位逻辑运算—“置位/复位触发器,复位/置位触发器”添加。
练习三、上升沿/下降沿指令可在“基本指令”—位逻辑运算—“扫描操作数的信号上升沿,扫描操作数的信号下降沿”添加。
可在“基本指令”—位逻辑运算—“在信号上升沿置位操作数,在信号下降沿置位操作数”添加。
可在“基本指令”—位逻辑运算—“扫描RLO的信号上升沿,扫描RLO的信号下降沿”添加。
任务二数字指令【学习目标】1.了解基本数字的数据类型格式、相互间转换规律等。
、2.熟练运用数字指令完成实操练习。
【相关知识】一、基本数字数据类型二进制/数值处理事实上,我们可以很容易地识别真正的逻辑控制系统,因为它们专用于处理二进制数据。
当今控制系统使用的计算机的性能,以及在数据处理、质量控制领域和其他一些行业应用的飞速发展,都极大地增加了使用PLC 进行数值处理的重要性。
可以在所有开环控制系统的应用领域内找到数值过程变量的应用实例——例如在用于过程操作和监视的连接设备中,或者在现场设备的控制应用中。
操作和监视过程监视的目的是快速、准确、清晰地为操作员提供关于工作机器或系统的最新信息,同时还可允许操作员干涉、控制和影响生产过程。
s71200沿指令S7-1200是西门子推出的一款可编程逻辑控制器(PLC),广泛应用于自动化控制领域。
本文将围绕S7-1200的指令进行介绍和解析,帮助读者更好地理解和应用该控制器。
一、概述S7-1200具有强大的处理能力和丰富的功能模块,可用于各种自动化控制系统。
它采用模块化设计,可根据实际需求选择不同的输入输出模块,实现对各类传感器和执行器的连接和控制。
此外,S7-1200还支持多种通信接口,可与上位机进行数据交换,实现远程监控和控制。
二、指令详解1. LD指令(Load)LD指令用于将一个位的状态(0或1)加载到一个变量中。
例如,LD X1.0表示将输入X1.0的状态加载到一个变量中。
LD指令常用于读取输入信号,判断逻辑条件。
2. AND指令AND指令用于逻辑与操作,将两个输入位的状态进行与运算,并将结果保存到输出位中。
例如,AND X1.0 X2.0 Y1.0表示将输入X1.0和X2.0的状态进行与运算,并将结果保存到输出Y1.0中。
3. OR指令OR指令用于逻辑或操作,将两个输入位的状态进行或运算,并将结果保存到输出位中。
例如,OR X1.0 X2.0 Y1.0表示将输入X1.0和X2.0的状态进行或运算,并将结果保存到输出Y1.0中。
4. SET指令SET指令用于将一个输出位的状态设置为1。
例如,SET Y1.0表示将输出Y1.0的状态设置为1,从而控制相应的执行器工作。
5. RESET指令RESET指令用于将一个输出位的状态复位为0。
例如,RESET Y1.0表示将输出Y1.0的状态复位为0,从而停止相应的执行器工作。
6. MOV指令(Move)MOV指令用于将一个变量的值移动到另一个变量中。
例如,MOV X1.0 Y1.0表示将输入X1.0的状态移动到输出Y1.0中,实现输入和输出之间的数据传输。
7. ADD指令(Addition)ADD指令用于对两个变量进行加法运算,并将结果保存到另一个变量中。