1 N
N i 1
pi ( xr ) |xr r cos( )
1 N
N
pi[r cos( )]
i 1
1
N i 1
pi[r cos(
)]
f (r, ) 1
0 p [r cos( )]d
将
pn (xr ) [r cos( n )]
代入
f (r, ) 1
0 p [r cos( )]d
Simple Model
Mathematic Expression of Back
Projection
投影值:
p (R, ) (x, y) (x cos y sin R)dxdy
某一角度的反投影
b (x, y) p (R, ) (x cos y sin R)dR
反投影获得的图像
b
h(r, ) 1
1
1 1
r sin( 0 ) r
h(x, y) 1
x2 y2
f (x, y) (x, y)**h(x, y)
相应于反投影重建算法的系统,其点扩展函数不是Dirac 函数,不是完美系统。
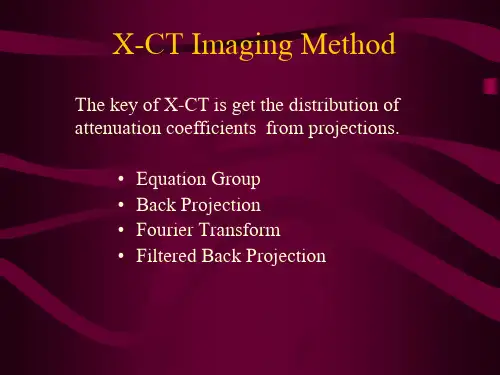
解析法
• Fourier Transform • Filtered Back Projection
a2R2
Back Projection Imaging System
取投影
反投影
图像重建
Dirac函数
反投影成像系统
冲激函数h(x,y)
扫描方式:旋转+平移 射线先平行移动,从物体的一侧到另一侧;
然后旋转一个角度,再作平行移动,之后又旋转一个角 度,直到完成半周。
Character: Blur column (star) shadow



![2024版《医学影像技术PPT课件》[1]](https://uimg.taocdn.com/a8979bb00342a8956bec0975f46527d3250ca655.webp)