直流电动机的优化滑模变结构控制
- 格式:pdf
- 大小:575.59 KB
- 文档页数:4
摘要舵伺服系统在航空航天领域,有着广泛应用和重要的研究价值。
应用无刷直流电机作为舵系统执行器,可以增大系统输出转矩,实现系统小型化。
本文基于无刷直流电机执行器,利用 DSP 与 FPGA 结合的核心处理单元,应用滑模变结构控制策略,实现舵机系统伺服,提高舵系统抗扰性和信号响应的快速性;并在系统中加入滑模观测器,实现对于系统内部状态量的观测,为实现无位置传感器控制提供条件本文应用无刷直流电机作为舵系统执行器,通过分析和设计滑模变结构控制算法,实现舵系统位置伺服控制,利用滑模变结构控制策略的特性,提高系统对于扰动和内部参数摄动的鲁棒性,与基于传统控制策略的伺服机构相比,系统的抗扰性得到了提高。
并在系统中引入滑模观测器,利用电流、电压传感器采样相电流和相电压作为该观测器的给定量,观测出电机的速度,转子运动换相位置信号和三相反电动势波形,从而实现电机的无位置传感器控制。
本文通过分析舵伺服机构的主要结构和工作原理,根据实际系统技术要求,设计出基于电动伺服系统的数字控制器。
利用 DSP 强大的数据处理能力和 FPGA 并行运算能力,实现设计的控制算法,提高舵系统的性能。
通过 MATLAB 中 Simulink 环境下构建理想系统模型,应用滑模控制算法,进行模型仿真。
通过系统仿真分析,设计出满足离散系统的滑模控制器参数。
通过 DSP 与 FPGA 结合的核心处理单元实现滑模变结构控制算法,应用于舵伺服系统中[1]。
最后,通过完成整体硬件与软件平台设计,实现对舵伺服系统的控制。
通过仿真和实验结果分析,验证了滑模控制具有强鲁棒性和抗扰性,满足舵系统对于快速性和抗扰性的技术要求,提高了系统整体控制性能。
关键字:滑模控制;滑模观测器;无刷直流电机;舵伺服系统;DSP+FPGABrushless dc motor of the sliding mode controller designand simulationAbstractRudder servo system is used in the aerospace field, it has important research value. Using BLDCM as the rubber system actuator, it will improve the system’s output torque, and achieve system’s miniaturization. Based on BLDCM actuator, combined DSP and FPGA as the core processing unit, using the strategy of sliding mode variable structure control achieve the rubber servo system which improve the robustness for disturbances and the speed for signal response. Adding sliding mode observer in the system realize the observation of internal system state which provide reliable parameters for the realization of position sensorless controlThrough a brief analysis of rudder servo on both the main structure and working principle, based on the actual system technical requirements, this paper designs a digital controller which is based on electric servo system. Using DSP and FPGA as the core control unit, and the strong ability of DSP data processing and the ability of FPGA parallel computing , achieve the design of control algorithms, and improve performance of rubber systemUsing BLDCM as the servo system actuator, through analysis and designing the algorithm of sliding mode control, this paper achieves the position servo control in rubber system. Using the characteristic of sliding mode variable structure improve the robustness for disturbance and inner parameters transformation. Compared with the control strategy based on traditional servo system, it improves the immunity of servo system. And addingsliding mode observer in the system, use circuit sensors and voltage sensors sample phase circuit and phase voltage as the giving quantities to observer. This paper rely on observer getting the motor’s speed, moving rotor’s changing phase position signal and three-phases waveforms of back-EMF, so that achieve the sensorless motor control Using Simulink in MATLAB build the ideal mode of the real system and the algorithms of sliding mode, and carry out mode simulation.Through the system simulation, design a sliding mode controller which meet the parameters of discrete systems, and through the combination of DSP and FPGA core processing unit realize control algorithm, which is applied to the rudder servo system. At last, finishing the design of whole hardware and software, realize the control of rubber servo system. Through the simulation and experiment, testified sliding mode control has strongly robustness and immunity for disturbance. This meets the rubber system’s technology requirements including rapid and immunity for disturbance, and improves overall system’s control performanc eKeywords:Sliding mode control,Sliding mode observer,BLDCM,Rubber servo system,DSP+FPGA目录摘要 (I)Abstract.................................................................................................................................................... I I 第1章绪论. (1)1.1 课题背景及研究的目的和意义 (1)1.2 国内外伺服研究现状 (2)1.3 无刷直流电机控制方法 (2)1.3.1 传统的控制方法 (3)1.3.2 模糊控制方法 (3)1.3.3 鲁棒控制方法 (3)1.3.4 神经网络控制方法 (4)1.3.5 自适应控制方法 (4)1.3.6 滑模变结构控制方法 (4)1.4 伺服系统应用的主要问题 (5)1.5 课题研究的主要内容 (6)第2章伺服系统的构成与数学模型 (8)2.1 伺服系统的总体结构 (8)2.1.1 无刷直流电机的选择 (9)2.1.2 伺服系统驱动方式 (9)2.2 无刷直流电机的工作原理 (9)2.3 无刷直流电机数学模型 (15)2.3.1 无刷直流电机的方程 (15)2.3.2 无刷直流电机的状态方程 (16)2.3.3 无刷直流电机的电磁转矩方程 (16)2.3.4 无刷直流电机的运动方程 (17)2.3.5 无刷直流电机的机械特性 (17)第3章滑模变结构理论 (18)3.1滑模变结构控制的基本原理 (18)3.2滑模运动及其存在和到达条件 (19)3.3滑模变结构控制 (19)3.3.1滑模变结构控制器设计 (19)3.3.2切换函数的设计 (19)3.3.3控制律的设计 (20)3.4抖振改善 (20)第4章基于滑模变结构的控制系统设计 (21)4.1 滑模控制器 (21)4.2 滑模观测器 (26)4.3 系统仿真与结果分析 (28)4.4 本章小结 (34)第五章结论 (35)参考文献 (38)谢辞 (40)第1章绪论1.1课题背景及研究的目的和意义随着科技的发展,伺服系统应用领域更加广泛,主要应用于智能机床、机器人、导弹制导以及船舶、车辆的自驾驶,可以说是实现未来工业全自动智能化必不可少的环节。
直流脉宽调速系统滑模变结构控制
吴秀珍;邵雪卷
【期刊名称】《计算机仿真》
【年(卷),期】2015(032)005
【摘要】在直流电机调速系统优化控制的研究中,针对常规滑模变结构控制的双闭环直流调速系统在添加负载扰动后转速响应存在静差的问题.为解决上述问题,提出了考虑扰动在内的转速环滑模变结构控制方案.由于扰动补偿作用的加入加大了电流给定的抖动,使回路电流脉动较大,在上述设计的基础上,在控制器输出添加了滤波器,有效的解决了上述问题.通过MATLAB仿真验证后,在dSPACE DS1103单板系统的支持下,将所设计的控制器与实际电机相连,通过在线调节参数,获取理想曲线.实验结果表明所设计的滑模控制器(smc)具有较好的鲁棒性,系统转速无超调,电流较平滑,抗扰能力较强,为直流电机调速系统优化提供了参考.
【总页数】4页(P403-406)
【作者】吴秀珍;邵雪卷
【作者单位】太原科技大学电子信息工程学院,山西太原030024;太原科技大学电子信息工程学院,山西太原030024
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.直流调速系统的滑模变结构控制 [J], 刘龙江;杨维
2.基于滑模变结构控制的对转无刷直流电机调速系统 [J], 李林杰;焦振宏;时建欣
3.无刷直流电机调速系统神经网络自适应滑模变结构控制 [J], 李军红;李兰君;阳武娇
4.实现滑模变结构控制直流调速系统微机系统 [J], 李开生
5.PWM直流调速系统的滑模变结构控制 [J], 陈息坤
因版权原因,仅展示原文概要,查看原文内容请购买。
电机驱动系统中的滑模控制策略优化研究1. 滑模控制策略概述滑模控制是一种常用的非线性控制策略,适用于电机驱动系统等多种控制领域。
它通过引入一个滑模面来实现对系统状态的快速响应和鲁棒性控制。
滑模控制具有简单、快速、鲁棒性好等优点,但也存在着滑模面选择、控制参数选择以及系统参数变化等问题,需要进行优化研究。
2. 滑模控制策略优化方法2.1 滑模面选择优化滑模控制的关键在于选择一个合适的滑模面,以实现系统状态的快速追踪和抑制不确定性等目标。
传统的滑模面选择方法主要基于经验或试错法,无法保证最佳性能。
因此,研究者们提出了基于最优控制理论、自适应方法等进行滑模面选择的优化方法,以提高系统的性能和鲁棒性。
2.2 控制参数优化滑模控制策略中的控制参数选择对系统的稳定性和性能具有重要影响。
传统方法通常通过试验和经验进行选择。
现代优化算法如粒子群算法、遗传算法等被广泛应用于滑模控制策略中的控制参数优化,以提高控制性能并满足系统的要求。
2.3 系统参数变化补偿在实际应用中,电机驱动系统的参数可能会受到负载变化、温度变化等因素的影响而发生变化。
这种参数变化会对滑模控制策略的性能产生不利影响。
因此,研究者们提出了基于模型识别和自适应控制等方法来补偿系统参数的变化,以保证滑模控制策略的性能稳定性。
3. 优化研究案例分析以电机驱动系统为例,我们可以详细研究滑模控制策略的优化问题。
通过建立系统数学模型,根据滑模控制的原理和特点,可以设计相应的滑模面选择方法和控制参数优化方法,以实现对电机驱动系统的精确控制。
4. 结论滑模控制策略作为电机驱动系统中一种重要的非线性控制方法,具有简单、快速、鲁棒性等特点。
然而,滑模控制策略的性能还受到滑模面选择、控制参数选择以及系统参数变化等问题的影响。
因此,在实际应用中对滑模控制策略进行优化研究是非常重要的。
通过滑模面选择优化、控制参数优化以及系统参数变化补偿等方法,可以提高滑模控制策略的性能和鲁棒性,并实现对电机驱动系统的有效控制。

滑模变结构控制及应用滑模变结构控制(Sliding Mode Control,SMC)是一种具有强鲁棒性和抗扰动能力的非线性控制方法。
它是20世纪80年代发展起来的一种控制方法,它通过在滑模面上引入一个不连续函数来实现对系统状态的高频率的转换控制,从而将控制系统的性能提高到一个新的水平。
滑模变结构控制在自动控制领域中得到了广泛的研究与应用,下面我将就其基本原理、设计方法以及应用领域进行详细介绍。
滑模变结构控制的基本原理:滑模变结构控制的基本原理是引入一个滑模面,通过使系统状态在滑模面上进行快速的滑动,从而达到控制系统的稳定性和鲁棒性。
在滑模面上,系统状态由于受到控制输入和系统的非线性特性的影响而发生快速切换,从而使系统状态的滑动速度不断变化,最终达到滑动面的稳定状态。
滑模控制器利用滑模面上的控制输入来驱动系统状态沿着滑模面滑动,以实现状态的稳定和跟踪。
滑模变结构控制的设计方法:滑模变结构控制一般包括滑模面的设计和滑模控制器的设计两个步骤。
滑模面的设计要求其具有可实现性、稳定性和鲁棒性等特性,常用的滑模面设计方法包括等效控制、非线性控制、线性控制等。
滑模控制器的设计包括产生控制输入和产生滑模面两个部分,常用的滑模控制器设计方法包括理想滑模控制器、改进滑模控制器、自适应滑模控制器等。
滑模变结构控制的应用领域:滑模变结构控制在各个领域中都有广泛的应用,下面我将就几个典型的应用领域进行介绍。
1. 机械控制系统:滑模变结构控制在机械控制系统中应用广泛,例如机械臂控制、机械手控制等。
滑模变结构控制可以提供强鲁棒性和抗扰动能力,可以保证机械系统在复杂环境下的精确运动和稳定控制。
2. 电力系统:滑模变结构控制在电力系统中的应用主要包括电力系统稳定控制、电力系统调度控制等。
滑模变结构控制可以有效地处理电力系统中的不确定性和扰动,提高电力系统的稳态和动态性能。
3. 交通运输系统:滑模变结构控制在交通运输系统中的应用包括车辆控制、交通信号控制等。
关键字:滑模变结构PI 直流伺服电机PID1引言滑模变结构控制系统是一类特殊的变结构控制系统。
起特殊之处在于,系统的控制不仅有切换,而且该切换特性可以迫使系统的状态在切换面上沿预定的轨迹作小幅度、高频率的趋近运动-滑动模态运动。
这种滑动模态可以设计成与系统的参数及扰动无关。
这样,滑模变结构控制无须系统在线辨识就具有很好的鲁棒性。
滑模变结构控制近年来已被广泛应用于处理一些复杂的线性系统、非线性系统、时变、多变量耦合等确定性和不确定性系统,可使系统获得良好的动态品质[1]。
而对于高性能的直流伺服系统,一般要求精度高、无超调、响应速度快且鲁棒性好。
根据自动调节原理设计的常规PID、PI等控制器,结构简单,设计方法成熟,也容易实现,但直流伺服系统中的非线性、参数的时变性和外部扰动等都影响系统的控制性能,很难满足高精度伺服系统的要求。
滑模变结构控制的滑动模态对加给系统的干扰和系统的各种摄动具有完全自适应性,所以能完全满足高精度伺服系统的控制要求[2,4]。
2滑模变结构控制器设计直流伺服系统的结构框图如图1所示,虽然在多数情况下常把电机的参数看成常数,但实际当转速在大范围内变化时,电机的参数并非常数,而滑模控制正好对参数的变化不太敏感,故使用这种控制方式来控制电机具有很大的优越性。
2.3切换函数s的选取2.4控制量u的求取3仿真与结论由仿真结果可以看到,显然,当有电机参数大幅摄动时,滑模变结构控制系统能适应系统参数的变化,响应时间很快,很快达到稳态,无超调;而PID产生了大幅度的超调,对于直流伺服电机控制系统而言,超调过大,严重影响加工等过程。
5结束语本文通过对直流伺服系统分析,并对其设计了滑模变结构控制策略,设计方法简单,易于实现。
从仿真分析可知,滑模变结构控制优于PID控制,具有较强抑制参数摄动,自适应强。
另外合理地选择切换函数和控制率参数,滑模变结构控制系统具有快速性好、无超调、无静差的优良动、静态性能,而且系统参数摄动时,具有很好的鲁棒性。
无刷直流电机的指数趋近律滑模变结构控制李运德;张淼【摘要】In order to improve the ability of inhibition disturbances and quick response with brushless DC motor (BLDCM), a strategy of sliding mode control with exponential reaching law, and analysis of this control strategy feasibility was designed. Through the design of BLDCM speed control system, the control performance was improved greatly. The simulation results showed that the control strategy has good performance with fast response, no overshoot, ability of strong inhibition disturbances, and greatly improved the robustness of BLDCM. It proved that the control strategy was very effectively.%为了提高无刷直流电机(BLDCM)控制的抗负载扰动和快速响应能力,利用滑模变结构原理设计了一种指数趋近律的滑模变结构控制策略,并对该控制策略的可行性进行理论分析.通过设计BLDCM控制系统的速度环节,使控制性能得到很大改善.仿真试验表明,该控制策略具有响应速度快、无超调、抗负载扰动能力强等优点,提高了BLDCM的鲁棒性,从而验证了指数趋近律的滑模变结构控制策略的有效性.【期刊名称】《电机与控制应用》【年(卷),期】2011(038)003【总页数】4页(P32-35)【关键词】无刷直流电机;滑模变结构控制;指数趋近律【作者】李运德;张淼【作者单位】广东工业大学,广东,广州,510006;广东工业大学,广东,广州,510006【正文语种】中文【中图分类】TM301.2;TM330 引言无刷直流电机(Brushless DC Motor,BLDCM)由于结构简单、出力大、调速性能良好等优点,在工业领域中得到了广泛应用。
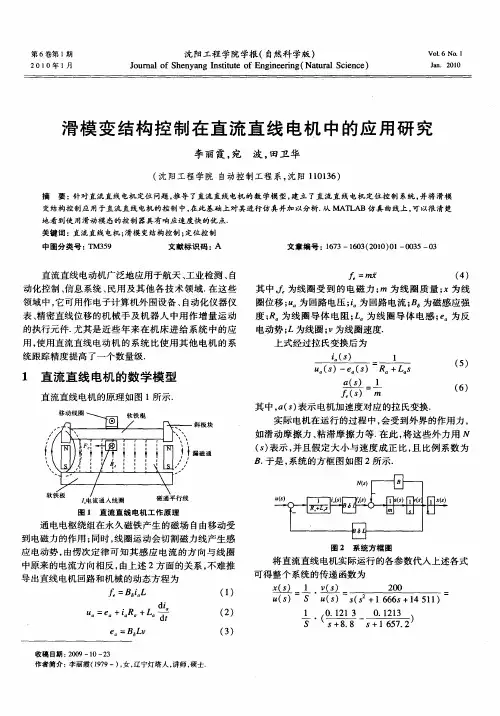
滑模变结构控制在直流直线电机中的应用研究李丽霞;宛波;田卫华【摘要】针对直流直线电机定位问题,推导了直流直线电机的数学模型,建立了直流直线电机定位控制系统,并将滑模变结构控制应用于直流直线电机的控制中,在此基础上对其进行仿真并加以分析.从MATLAB仿真曲线上,可以很清楚地看到使用滑动模态的控制器具有响应速度快的优点.【期刊名称】《沈阳工程学院学报(自然科学版)》【年(卷),期】2010(006)001【总页数】3页(P35-37)【关键词】直流直线电机;滑模变结构控制;定位控制【作者】李丽霞;宛波;田卫华【作者单位】沈阳工程学院,自动控制工程系,沈阳,110136;沈阳工程学院,自动控制工程系,沈阳,110136;沈阳工程学院,自动控制工程系,沈阳,110136【正文语种】中文【中图分类】TM359直流直线电动机广泛地应用于航天、工业检测、自动化控制、信息系统、民用及其他各技术领域.在这些领域中,它可用作电子计算机外围设备、自动化仪器仪表、精密直线位移的机械手及机器人中用作增量运动的执行元件.尤其是近些年来在机床进给系统中的应用,使用直流直线电动机的系统比使用其他电机的系统跟踪精度提高了一个数量级.1 直流直线电机的数学模型直流直线电机的原理如图1所示.图1 直流直线电机工作原理通电电枢绕组在永久磁铁产生的磁场自由移动受到电磁力的作用;同时,线圈运动会切割磁力线产生感应电动势,由愣次定律可知其感应电流的方向与线圈中原来的电流方向相反,由上述2方面的关系,不难推导出直线电机回路和机械的动态方程为其中,fe为线圈受到的电磁力;m为线圈质量;x为线圈位移;ua为回路电压;ia为回路电流;Bδ为磁感应强度;Ra为线圈导体电阻;La为线圈导体电感;ea为反电动势;L为线圈;v为线圈速度.上式经过拉氏变换后为其中,a(s)表示电机加速度对应的拉氏变换.实际电机在运行的过程中,会受到外界的作用力,如滑动摩擦力、粘滞摩擦力等.在此,将这些外力用N(s)表示,并且假定大小与速度成正比,且比例系数为B.于是,系统的方框图如图2所示.图2 系统方框图将直流直线电机实际运行的各参数代入上述各式可得整个系统的传递函数为由于1 657.2≫8.8,显然在的主导极点为-8.8,为简化后面的推导,忽略第二项,则此系统变为1个二阶的系统2 滑模变结构控制器设计变结构控制器如图3所示.图3 滑模变结构控制系统其中,R(x)为期望的位置;P为实际测量的位置;U为电压;X1为期望值与实际值的误差;n(t)为外界干扰.考虑电压与位置间的传递函数令X1为位置误差,X1=R-P,P=R-X1,则由式(9)得K(U-n)=R¨-X¨1+A(R﹒-X﹒1)+BR-BX=R¨+AR﹒+BR-X¨1-AX﹒1-BX.令X2=X﹒1,则X﹒2=X¨1=R¨+AR﹒+BR-AX﹒1-BX1-KU+Kn=R¨+AR﹒+BR-BX1-AX2-K(U-n).设定顺滑曲面的切换函数为根据前面的推导S◦S﹒<0.由(12)式可以看出,影响系统稳定性的因素为状态变量X1、X2与S的乘积及控制量U.因此选择控制器如下:其中,φ1和φ2为状态变量的回馈参数;d为正数;H1、H2与sgn(S)定义如下:将式(13)代入式(12)由前面推导出的转换条件S◦S﹒<0,可以判断出如果要S◦S﹒<0则必须有以下的当X2 S>0时,H2=1当X2 S<0时,H2=-1当X1 S>0时,H1=1当X1 S时,H1=-1化简可以根据式(15)至式(19)所推导的逻辑判断法则来设计控制器,图4为根据逻辑判断式所绘出的方块图.图4 滑动模型逻辑判断3 控制系统仿真由式(7),电机的传递函数为以下形式,并用G(s)表示,具体为.以此为基础,考虑输入为阶跃函数时输出的波形情况及轨迹追踪能力.具体分2部分,首先d=30时,讨论输出;其次,d=300时,讨论输出.系统没有干扰,输入为阶跃函数且d=30时,仿真结果见图5.图6为参数d=300时的阶跃响应.4 结论从MATLAB仿真曲线上,可以很清楚地看到使用滑动模态的控制器具有响应速度快的优点,并且所设控制器中参数d取值不同,响应速度不同.[1] 雷进波,胡旭晓,李家赓.最优控制策略在直流直线电机中的应用研究[J].组合机床与自动化加工技术,2003(9).[2] 叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2002.[3] 李酞黔.直接驱动直线交流伺服电动机[J].微电机,1998(3).[4] Caricchi F,Giulii Capponi F,Crescimbini F,et al.Sinusoidal brushless drive with low-cost linear Hall effect position sensors[C].Proc IEEE-PESC Conf,2001:799-804.[5] 范海民,夏西平,库才发,等.一种直流永磁圆筒型直线伺服电机系统[J].洛阳工学院学报,2002,22(l):43-46.[6] 丁志刚,蒋黔麟,陶志鹏,等.微特直线电机及其控制[M].杭州:浙江大学出版社,1987.[7] 梁得亮,鲁军勇,丰向阳.永磁直线无刷直流电动机的建模与仿真[J].西安交通大学学报,2004,38(2):186-189.[8] Kuehnlw M R,Peeken H,Troeder Cetal.The Toroidal Drive[J].Mechanical Engineering,1981,103(2):32-39.[9] 陈志华,李圣怡,杨舜洲.直线电机直接驱动的伺服刀架控制器的研究[J].控制理论与应用,2002,19(1):89-94.[10] 江思敏,王先逵,吴丹,等.凸轮数控车削系统关键技术的研究[J].机械工程学报,2003,39(12):135-139.[11] 范大鹏,尹自强,郑子文.直线电机在精密加工中的应用[J].制造技术与机床,1997(5):33-35.[12] Chung SK,Lee J.Robust speed on trollof brushless directdrive Motor using integral variable structure control[J].IEE Pro-Electr PowerApple,1995,142(6):362-366.。