频率步进雷达系统的仿真与测试其实那么复杂
- 格式:pdf
- 大小:173.91 KB
- 文档页数:3
雷达的测试原理
雷达的测试原理是利用电磁波的特性进行探测和测量目标物体的位置、速度、形状等信息。
具体原理如下:
1. 发射:雷达系统通过天线发射一束电磁波,通常使用微波波段的频率。
发射功率和频率根据应用环境和目标物体的要求进行选择。
2. 脉冲方式:雷达系统通常使用脉冲方式发射电磁波,即以一定时间间隔连续发送短时间的高功率电磁波脉冲。
脉冲的宽度和重复周期根据应用需求进行设置。
3. 接收:发射的电磁波遇到目标物体时,一部分被目标物体反射回来,形成回波信号。
雷达系统的接收机接收并放大回波信号,以便进行后续的处理。
4. 时延测量:接收机收到回波信号后,通过测量发送脉冲到接收脉冲的时间延迟,即可以计算出信号的往返时间。
该时间与目标物体的距离成正比。
5. 反射信号分析:接收到的回波信号经过分析和处理,可以提取出目标物体的位置、距离、速度、形状等信息。
6. 显示和记录:最后,通过数据处理和分析,可以将目标物体的信息以图形或数字的形式显示出来,或记录到数据存储设备中供后续分析和应用。
总的来说,雷达的测试原理是通过发射和接收电磁波来探测目标物体,通过测量回波信号的时间延迟和分析处理反射信号,得到目标物体的相关信息。
雷达干扰系统仿真研究随着现代战争的不断发展,雷达干扰技术在军事斗争中发挥着越来越重要的作用。
为了更好地研究和掌握雷达干扰系统的性能,仿真研究成为了一个重要的手段。
本文将围绕雷达干扰系统仿真研究展开讨论,探讨其历史、现状、未来发展趋势以及具体实现方法。
在雷达干扰系统仿真研究领域,过去的研究主要集中在干扰算法和信号处理方面。
随着计算机技术的不断发展,越来越多的研究者开始利用计算机仿真来研究雷达干扰系统。
目前,国内外的研究者们正在不断地探索新的仿真方法和工具,以便更好地对雷达干扰系统进行模拟和分析。
雷达干扰系统仿真研究的目的主要是为了验证干扰系统的性能,探究不同干扰策略的效果,并通过对干扰系统的优化来提高干扰效果。
本文采用计算机仿真方法对雷达干扰系统进行模拟,从而避免了对实际设备进行试验所带来的风险和成本。
同时,通过仿真研究还可以对干扰系统进行优化,提高其干扰性能。
在仿真过程中,我们首先建立雷达干扰系统的数学模型,并利用仿真工具进行模拟。
通过对不同干扰策略的对比试验,我们可以发现不同策略的优劣,从而为实际干扰系统的优化提供参考。
此外,我们还可以通过对仿真结果的分析来探究雷达干扰系统的性能指标,例如干扰效率、干扰范围等。
通过对雷达干扰系统仿真研究的历史、现状和未来发展趋势进行梳理和评价,我们可以发现仿真研究在雷达干扰系统领域中具有越来越重要的作用。
通过仿真不仅可以避免对实际设备进行试验所带来的风险和成本,还可以对干扰系统进行优化,提高其干扰性能。
然而,目前仿真研究还存在一些不足之处,例如仿真模型的精度、仿真工具的多样性等问题,需要未来的研究者们不断探索和完善。
在雷达干扰系统仿真研究中,常用的仿真工具包括MATLAB、Simulink、SystemC等。
这些仿真工具都提供了强大的仿真环境和丰富的函数库,可以满足雷达干扰系统仿真的各种需求。
此外,一些研究者还开发了专门的雷达干扰系统仿真软件,例如JASMIN、RASS等,这些软件针对雷达干扰系统进行了优化,可以更加真实地模拟实际情况。
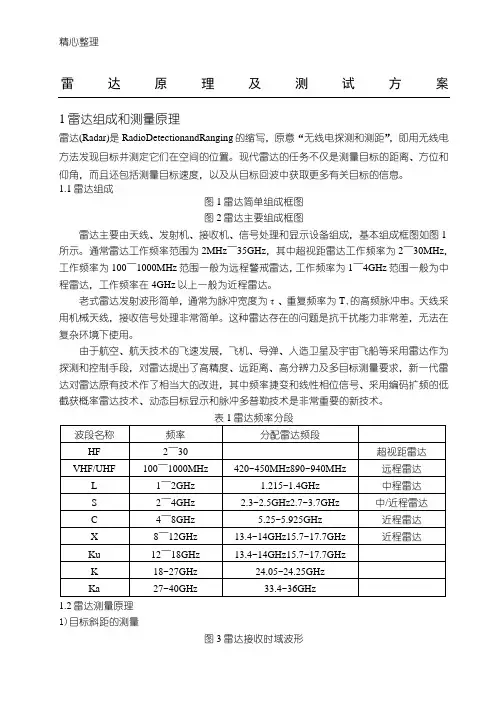
雷达原理及测试方案1雷达组成和测量原理雷达(Radar)是RadioDetectionandRanging的缩写,原意“无线电探测和测距”,即用无线电方法发现目标并测定它们在空间的位置。
现代雷达的任务不仅是测量目标的距离、方位和仰角,而且还包括测量目标速度,以及从目标回波中获取更多有关目标的信息。
1.1雷达组成1.2雷达测量原理1)目标斜距的测量图3雷达接收时域波形在雷达系统测试中需要测试雷达到目标的距离和目标速度,雷达到目标的距离是由电磁波从发射到接收所需的时间来确定,雷达接收波形参见图3,雷达到达目标的距离R为:R=0.5×c×tr式(2)式中c=3×108m/s,tr为来回传播时间2)目标角位置的测量目标角指方位角或仰角,这两个角位置基本上是利用天线的方向性来实现。
雷达天线将电磁能汇集在窄波束内,当天线对准目标时,回波信号最强。
回波的角位置还可以用测量两个分离接收天线收到信号的相位差来决定。
3)4)max t e min式中Pt 为发射机功率,G为天线增益,Ae为天线有效接收面积,σ为雷达回波功率截面积,Smin为雷达最小可探测信号。
雷达方程可以正确反映雷达各参数对其检测能力影响的程度,不能充分反映实际雷达的性能。
因为许多影响作用距离的环境和实际因素在方程中没有包括。
1.4雷达分类军用雷达主要分类:不能满足复杂雷达信号测试需求。
更为重要的是,雷达在实际工作过程中接收到的信号并不是纯净的发射回波,它包含各种杂波和多普勒效应,特别是在地形复杂或海面各种时,接收机接收到的杂波比需要探测的物体回波大的多,而这一切目前没有通用测量设备来生成雷达接收机所接收到的实际波形。
因此各个雷达研制单位投入大量人力、物力研制各种雷达模拟器,但这些模拟器往往受各种设计因素影响,只是实际雷达波形的简化,并只考虑到典型的应用,对复杂的应用环境无法模拟。
这样无法及时发现雷达研制和使用过程中问题和隐患。
雷达仿真参数雷达仿真是通过计算机模拟和分析雷达工作过程的一种方法。
在雷达仿真中,需要使用一系列的参数来描述雷达系统的性能和特性。
这些参数包括雷达的发射和接收信号、天线参数、目标参数等等。
本文将着重介绍雷达仿真中常用的参数及其含义。
1. 雷达发射信号参数雷达发射信号的参数主要包括频率、脉冲宽度、重复频率、功率等。
频率用于描述雷达发射信号的频率范围,通常以赫兹(Hz)为单位。
脉冲宽度表示雷达发射信号的脉冲宽度,可用纳秒(ns)为单位。
重复频率是指雷达脉冲的发射频率,一般以赫兹(Hz)表示。
功率表示雷达发射信号的功率大小,常以瓦特(W)为单位。
2. 雷达接收信号参数雷达接收信号的参数包括波形、带宽、信噪比等。
波形用于描述雷达接收信号的波形特征,可以是连续波(CW)或脉冲波。
带宽表示雷达接收信号的频带宽度,常以赫兹(Hz)为单位。
信噪比是衡量雷达接收信号中信号与噪声的比值,通常以分贝(dB)为单位。
3. 雷达天线参数雷达天线参数主要包括天线增益、波束宽度、极化等。
天线增益描述天线的辐射效率,一般以分贝(dB)表示。
波束宽度表示天线主瓣束宽的角度范围,常以度(°)表示。
极化是指天线辐射电磁波时的电场或磁场方向,可以是垂直极化、水平极化或者其他极化方式。
4. 雷达目标参数雷达目标参数是描述被雷达探测到的目标的性质和位置信息。
包括目标的距离、速度、方位角、仰角等。
距离表示目标距离雷达的距离,通常以米(m)为单位。
速度表示目标相对于雷达的运动速度,常以米每秒(m/s)表示。
方位角是指目标相对于雷达的方位角度,仰角是指目标相对于雷达的仰角度。
通过对这些参数的合理设定和调整,可以模拟出不同雷达工作状态下的信号和目标响应,从而进行雷达性能评估、系统优化等工作。
雷达仿真是雷达系统设计和研发中的重要环节,能够有效地减少实际试验成本和提高系统性能。
总结起来,雷达仿真参数是用于描述雷达工作过程的一系列参数,包括发射信号参数、接收信号参数、天线参数和目标参数。
步进频率雷达高分辨成像处理算法的开题报告【摘要】步进频率雷达(SAR)成像技术是一种成熟的高分辨雷达成像技术,已广泛应用于军事、民用等领域。
本文将探讨步进频率雷达成像技术的原理、步进频率雷达成像处理算法的研究进展以及针对高分辨率SAR成像的图像先验知识辅助图像重建算法。
【关键词】步进频率雷达,高分辨成像,成像处理算法,先验知识,图像重建。
【引言】步进频率雷达(SAR)成像技术由于其高空间分辨率、强干扰抑制能力、成像距离远等优点,已广泛应用于军事、民用等领域 [1]。
SAR成像技术的核心是利用雷达信号与地面目标相互作用的特性,通过对反射信号进行处理,生成高精度的地面目标图像。
步进频率雷达成像技术在采集信号的过程中,发射一系列相同的波形,每个波形的频率随时间步进变化,接收到的信号与之前的信号相关,从而得到目标反射率的二维图像。
SAR成像处理算法是SAR成像技术的关键技术之一。
SAR成像处理算法的主要任务是对接收到的信号进行滤波、解调和重建,从而得到高质量的目标图像 [2]。
本文将首先介绍步进频率雷达成像技术的原理,接着探讨步进频率雷达成像处理算法的研究进展以及针对高分辨率SAR成像的图像先验知识辅助图像重建算法。
【步进频率雷达成像技术原理】步进频率雷达成像技术根据调频连续波雷达(FMCW)工作原理,使用持续波载频信号调制线性调频信号,并对接收到的信号进行自相关处理,得到反射率的二维图像 [3]。
具体的工作流程如下:1. 发射信号。
步进频率雷达发射一个带有持续波载频信号的线性调频信号,同时记录其带宽和中心频率。
2. 接收信号。
目标反射信号经过多次反射、衰减后返回到雷达接收器,接收器采样并记录接收到的信号。
3. 自相关处理。
对接收到的信号进行自相关处理,得到目标的反射率二维图像。
自相关处理时需要考虑信号的幅度和相位信息。
4. 图像生成。
从自相关处理得到的信号中提取目标反射率特征,对目标进行图像重建,得到反射率二维图像。
浅谈频率步进雷达及其系统实现作者:张炜来源:《中小企业管理与科技·下旬刊》2015年第05期摘要:目前越来越多的宽频带雷达投入到空管监视领域,一次雷达经常采用CHIRP技术实现远距离探测并提高距离分辨率。
采用合成技术,将一串窄带脉冲合成大带宽信号从而实现高分辨力,该信号以波形易于生成、对接收机带宽要求低、ADC采样率容易满足等优点成为复杂目标探测的主要信号形式。
因此频率步进信号在新体制雷达中将会占有重要的位置,具有非常重要的意义。
关键词:频率步进信号1 频率步进信号理论采用矩形子脉冲合成频率进步信号是比较典型的做法,当频率进步信号的合成带宽一定时,其距离分辨率也就决定了,而矩形子脉冲模式下,脉冲重复频率决定了雷达的不模糊作用距离,重复频率越高,不模糊距离越大,相应数据率就很低,反之数据率就会很高,因此矩形脉冲的数据率与不模糊作用距离就成了一对矛盾。
用CHIRP子脉冲代替矩形脉冲,可以解决数据率与作用距离的关系,子脉冲为CHIRP的频率步进信号称为调频步进信号。
2 调频频率步进信号处理流程对于调频步进信号处理,首先要进行子脉冲匹配滤波得到压缩后的窄脉冲,其次对窄脉冲作脉间IFFT处理。
调频步进高分辨处理成像。
上述关于调频步进信号处理的方法是在目标静止的前提下,实际目标经常是运动的,其处理方法也会有所不同。
3 宽带频率步进雷达系统的设计3.1 参数设计本文参考CAMBER雷达的设计方法,采用脉冲压缩比为320的线性调频信号,脉冲宽度20微秒,占空比20%,重复频率10K。
权衡系统的各方面性能及同时能满足所需的距离分辨率要求(0.3米),信号的合成带宽定为1024M赫兹,调频点设计为128个,子脉冲带宽16M 赫兹。
3.2 系统总体组成及部件设计3.2.1 频率综合器设计频率综合器主要实现宽频带雷达信号的产生,包括中频信号生成和射频信号生成两个部分。
其中中频信号的产生采用直接数字频率合成原理(DDS),射频段则采用倍频器和混频器实现。
步进频率雷达工作原理
步进频率雷达(FMCW雷达)是一种新型的雷达系统,它的工作原理是利用调制过程中发射机信号的频率周期性的变化来实现距离、速度等参数的测量。
具体来说,步进频率雷达主要是通过改变频率信号的发射和接收时间,利用接收瞬时频率的变化,计算出物体的距离、速度等参数的。
下面我们来详细介绍一下步进频率雷达的工作原理:
1. 发射信号:
步进频率雷达的工作原理是通过发射一个微弱的高频信号,向目标发送多个特定频率的信号。
这些信号会在目标处反射,并被接收器接收。
2. 接收信号:
接收器会接收到信号并测量信号的相位和幅值变化。
这些变化代表了信号在变化时所需的时间。
这个时间可以用来计算物体的距离。
3. 求解反射信号:
反射信号的相位和幅值变化是由于它经过的实际距离和速度造成的。
通过比较发射和接收信号的相位和幅值变化,可以精确地确定反射信号所代表的实际距离和速度。
4. 分析数据:
步进频率雷达所测量到的数据可以用来确定物体的位置、速度和其他参数。
通过分析数据,可以计算物体相对雷达的运动状态。
这种技术在飞行器、汽车和其他交通工具上广泛应用。
在实际应用中,步进频率雷达具有高精度和长测距范围等优点。
它能够测量目标远离雷达的距离,同时还能解决多径效应等难点问题。
此外,它还具有较高的角度分辨率和速度分辨率,逐渐成为新一代雷达系统的主流技术。
使用ADS 软件软件进行雷达瞬时测频仿真进行雷达瞬时测频仿真(IFM—Instantaneous Frequency Measurement )在现代电子战中,非常重要的任务之一就是快速侦测敌方雷达参数。
在雷达的各种特征参数中频率参数是最重要的参数之一。
雷达的频率参数包括载波频率、频谱和多普勒频率等。
本文讨论了使用安捷伦ADS 软件利用比相法对雷达信号载波频率的测量。
其中包括使用微波鉴相法测频和数字测频法的基本原理、在ADS 软件中原理图实现和仿真结果。
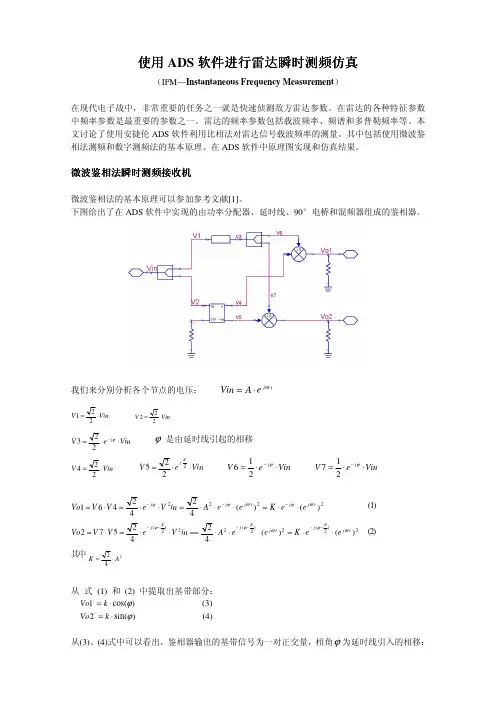
微波鉴相法瞬时测频接收机微波鉴相法的基本原理可以参加参考文献[1]。
下图给出了在ADS 软件中实现的由功率分配器、延时线、90°电桥和混频器组成的鉴相器。
我们来分别分析各个节点的电压: tj eA Vin ⋅⋅=ωVin V ⋅=221 Vin V ⋅=222 Vin e V j ⋅⋅=−ϕ223 ϕ 是由延时线引起的相移 Vin V ⋅=224 Vin e V j ⋅⋅=⋅2225πVin e V j ⋅⋅=−ϕ216 Vin e V j ⋅⋅=−ϕ2172222)()(4242461t j j t j j j e e K e e A in V e V V Vo ⋅−⋅−−⋅⋅=⋅⋅⋅=⋅⋅=⋅=ωϕωϕϕ (1) 2)2(2)2(22)2()()(4242572t j j t j j j e e K e e A in V e V V Vo ⋅−−⋅−−−−⋅⋅=⋅⋅⋅==⋅⋅=⋅=ωπϕωπϕπϕ (2)其中 242A K ⋅=从 式 (1) 和 (2) 中提取出基带部分: )cos(1'ϕ⋅=k Vo (3) )sin(2'ϕ⋅=k Vo (4)从(3)、(4)式中可以看出,鉴相器输出的基带信号为一对正交量,相角ϕ为延时线引入的相移:T f c L c Lgg g g⋅⋅=⋅∆⋅=⋅∆=ππλπλϕ22 (5) 式中,g λ为延时线中的信号波长;g c 为延时线中的电波速度;L ∆为延时线长度;T 为延时线引入的延时;f 为输入信号的载波频率。
调频连续波雷达(FMCW)测距测速原理FMCW雷达的工作原理基于多普勒效应和频率测量。
当发射机发送连续变化的频率调制信号时,信号的频率将会随时间线性变化。
这个频率变化的斜率称为调频斜率。
当发射信号经过天线发射出去,在遇到目标后,信号会被目标散射回来,然后被接收天线接收。
当接收天线接收到返回信号时,会将信号和发射信号进行混频处理,将其与发射信号相乘。
这样做的目的是为了提取目标的频率信息。
由于目标的速度不同,返回信号的频率也会有所不同。
根据多普勒效应的原理,当目标向雷达揭示而来时,频率会比发射信号的频率高;相反,当目标远离雷达时,频率会比发射信号的频率低。
接收到的混频信号将通过低通滤波器进行滤波,以去除不想要的频率成分。
然后,信号将被转换成数字信号,通过快速傅里叶变换(Fourier Transform)进行频谱分析。
频谱的峰值表示目标的频率,根据频率的变化可以计算出目标的速度。
根据多普勒频移的公式,测量得到的频移值与目标的速度成正比。
利用目标的速度与雷达到目标的距离之间的关系,可以通过简单的数学运算得到目标的距离。
由于信号频率的线性变化,可以通过测量信号的起始频率和终止频率,以及相应的时间间隔,计算得到距离。
在FMCW雷达系统中,还需要对信号的回波强度进行测量,以评估目标的反射特性。
这可以通过测量接收信号的功率来实现。
通过分析接收到的功率信号,可以确定目标的散射截面积(Cross Section),从而估计目标的大小。
总结起来,FMCW雷达的测距测速原理基于多普勒效应和频率测量。
通过发送频率变化的信号,接收并处理返回信号,测量目标的频率和功率,从而得到目标的距离、速度和反射特性。
这种雷达系统具有高精度、高分辨率和广泛测速范围的优势,广泛应用于交通监测、无人驾驶、气象观测等领域。
收稿日期!"##$%#&%"#’修订日期!"##$%#(%"#基金项目!国防预研基金资助)**&$+&+&,-#$#./项目文章网址!0112!33444+0567+891+:8305673"##$3;#3#;$.3文章编号!$###%.<*&)"##$/;#%#;$.%$#频率步进雷达数字信号处理毛二可=龙腾=韩月秋)北京理工大学电子工程系雷达技术研究所=北京$###<$/>?@?A B CD ?@E B CF G H I J D D ?E @H KD A J F F J >K G J L M J E I NG B >B GO P Q R S 98T =U V Q W X 9%Y Z X =[V P \]%59)^921+_‘\a 9:1]_8Z :\8T Z 899]Z 8T =,9Z b Z 8Tc 8d 1Z 1X 19_‘S 9:08_a _T e =,9Z b Z 8T $###<$=f 0Z 8g/摘要!综述了频率步进雷达系统设计与信息处理中的主要问题=包括系统参数设计h 目标抽取算法h 与f 0Z ]2子脉冲的兼容性h与圆锥扫描体制的兼容性等等=并论述了不同情况下多普勒效应的影响及其解决方法=提出了相应的数字信号处理方案i 关键词!雷达’距离高分辨’频率步进’信息处理中图分类号!j "k &文献标识码!VB l m n o p q n !;19229r‘]9Y X 98:e]g r g ]Z d gs 9]eZ t 2_]1g 811e 29_‘1090Z T 0]g 8T 9]9d _a X 1Z _8]g r g ]d e d 19t +S 0959e2]_7a 9t d _‘109d 19229r‘]9Y X 98:e]g r g ]g ]9r Z d :X d d 9rZ 810Z d 2g 29]=Z 8:a X r Z 8T1094g s 9‘_]t r 9d Z T 8=109g a T _]Z 10t d _‘1g ]T 91961]g :1Z _8=1092]_:9d d Z 8T_‘[_r X a g 19ru ]9Y X 98:e;19229rv g r g ];Z T 8g a =g 8r109:_t %2g 1Z 7Z a Z 1e7914998d 19229r‘]9Y X 98:e]g r g ]g 8r:_8Z :g a d :g 8]g r g ]+c 89g :0d Z 1X g 1Z _8=109^_22a 9]9‘‘9:1d g ]9g 8g a e w 9r +V 8rd _t 92]_:9d d Z 8Td :09t 9d g ]9T Z s 98+x y z{|o }m !]g r g ]’0Z T 0]g 8T 9]9d _a X 1Z _8’d 19229r‘]9Y X 98:e ’d Z T 8g a 2]_:9d d Z 8T在雷达系统中采用距离高分辨率信号具有很多优越性~$!=频率步进信号是其中重要的一种~"!i它由一串载频线性跳变的雷达脉冲组成=通过对脉冲回波的c u u S 处理获得距离高分辨率的效果~"!i 由于这种信号可以在获得距离高分辨率的同时降低对数字信号处理机瞬时带宽的要求=因此近年来受到了广泛的注意i实际上=频率步进的概念出现得相当早~&!=近年来则得到了更为详尽的研究~"=k !i频率步进雷达信号的类型主要是两种!"频率步进脉冲串信号=即本文所称的频率步进信号’#频率步进连续波信号=通常应用于探地雷达=如探测地雷的场合~(!i 为保证探地雷达具有高的分辨率和好的穿透性=频率步进连续波雷达一般选择波长较长的雷达波段=同时要求具有小于$t 的距离分辨率=因此它通常是一种超宽带的雷达体制~(!i 与频率步进连续波相比=频率步进脉冲串雷达的应用场合更为广阔=包括弹道导弹检测~.!h 合成孔径和逆合成孔径雷达~"!h 单脉冲三维成像~"!h汽车防撞~$!等等i 因此=频率步进脉冲雷达是一种重要的高分辨率雷达体制=也是本文分析的重点i 本文后面所指的频率步进雷达=都是指频率步进脉冲串雷达i我国学者近年来对这个问题也进行了大量的研究=其中文献~<!介绍了这种信号实现距离高分辨率成像的基本原理=文献~*!研究了这种信号的低截获概率特性=文献~$#!研究了这种信号的误差特性=文献~$$!研究了这种信号的多普勒特性=文献~$"!提出了调频步进信号)频率步进与f 0Z ]2子脉冲相结合/的处理方案=文献~$&=$k !讨论了频率步进信号与圆锥扫描的兼容性问题=文献~$(=$.!讨论了频率步进信号的目标识别问题i 此外=由于运动目标是频率步进雷达信息处理的难点=因此=文献~$$%"$!等多篇文章详细讨论了运动目标处理的问题i本文的目的=是对频率步进雷达信号处理进行综述i 总结了在不同参数设计方案下的处理策略=提出了用目标抽取算法获得完整的一维距离像的方法=对调频步进信号的处理方案进行了进一步的讨论=对频率步进与圆锥扫描体制的兼容性问题进行了探讨=提出了一种新的获取角度信息的方法=并研究了各种情况下目标多普勒效应对系统的影响i第""卷增刊"##$年.月航空学报V f S V V \v P Q V &S c f V \S V ;S v P Q V &S c f V ;c Q c f Vj _a +"";X 2+’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’’(X 89"##$!频率步进雷达的基本原理"#"信号形式及基本处理策略设$频率步进信号的脉冲重复周期为%&’发射脉冲宽度为(’载频起始频率为)*’频率步进阶梯为+)’频率步进数为,’采样频率为)-’%-.!/)-’光速为01频率步进的发射信号2345.6,7!8.*&9:;478%&7(/<=>(?9@A B 7C <D 3)*E 8+)54F 3!5式中$&9:;34/(5.!’7(/<G4G(/<*’H其它I本振信号为J 345.6,7!8.*&9:;478%&7%&/<%=>&?9@A B 7C <D 3)*E 8+)54F 3<5距离为K 的目标回波信号为L 345.6,7!8.*&9:;478%&7(<7<K 0M N O P(?9@A 7C <D 3)*E 8+)547<K=>BF3Q 5回波信号与本振混频后得到L 345.6,7!8.*&9:;478%&7(<7<K 0M N O P(?9@A 7C <D 3)*E 8+)5<KB F.6,7!8.*&9:;478%&7(<7<K 0M N O P(?9@A 7C <D )*<K BF 09@A 7C <D 8+)<KB F3R 5对于固定目标标来说’式3R 5的第!个指数项是常数’第<个指数项可以看成时间点为<K /0’频率成线性变化的频域信号1对这样的信号进行采样’并归一化’可以得到B FL 385.9@A 7C <D 8S /,3T 5其中$S .U V W X Y 3<K ,+)/05’8.*’!’<###,7!’U V W X Y 为取整运算1对式3T 5作Z [[\运算并求模’就可以得到精确的时间点<K /01]L 3^5].-_X B D 37S E ^5F-_X ‘37S E ^5B F,I ^.*’!’<’a’,7!3b 5显然’上式在^.S时达到最大’经过门限判决后可以根据^值得到K 的信息1"#c 频率步进信号的物理意义在线性系统理论中’向一个待测线性系统输入一个d 冲击函数e ’得到的输出f 345可以看成该系统的冲击响应’而f 345的频域表达g 3h 5是这个系统的传递函数1对于频率步进信号的处理’可以作类似的理解$向d 目标系统e 发射一组等间隔的频率谱线3冲击函数的频域抽样5’其回波为d 目标系统e 的传递函数g 3h 5’对其进行Z [[\’可以得到相应的冲击响应f 345’包含着时间3距离5信息1当目标有速度时’发生多普勒频率’则目标系统为一个非线性系统’必须进行补偿后才能处理1频率步进将带宽为i .,+)的信号分成,次发射’降低了系统的瞬时带宽’从而减轻了数字信号处理的负担1但是’正因为如此’频率步进信号需要,个脉冲才能得到一次结果’数据率较低’从而成为多普勒敏感信号1文献B !!F 对此进行了详细分析1<频率步进信号处理关键技术c #"参数匹配问题频率步进信号的参数匹配问题在雷达总体设计阶段非常重要’其关键参数包括发射脉宽(I 频率步进阶梯+)I 频率步进数,I 采样间隔%-及脉冲重复周期%&等1在给定雷达最大不模糊距离K Wj 信号带宽i .,+)j 以及目标最大长度k 的条件下’有必要对这些参数进行合理的设计’文献B !l F对这一问题进行了详细讨论’其结论主要有$3!5Z [[\后的单点不模糊距离m Z必须大于目标最大长度k ’即+)n 0/3<k513<5根据带宽i j 频率间隔+)确定,’,.i /+)13Q 5根据雷达最大作用距离K 确定%&’有%&.<K /013R 5通常情况下’Z [[\后的单点不模糊距离m Z 必须大于等于单脉冲距离分辨率m (’有(n !/+)’这是(与+)的紧约束条件13T 5根据脉宽(确定采样间隔%-’使得%-n (13b 5实际上’当(E %-n</+)时’通过一定的算法’依然可以得到完备的结果’这是(’+)’%-的宽约束条件1在实际当中’一般要求满足紧约束条件’从而保证Z [[\后单点不模糊距离m Z 有一定的冗余’o!p 增刊毛二可等$qq q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q 频率步进雷达数字信号处理便于速度补偿和杂波剔除!同时使得"#$%&!用以减小采样幅度损失’可见!当参数设计合理时!对回波信号作())*运算仅仅得到完备的一维距离像的信息!但是这些信息是冗余的+乱序的+且是分散的’因此!需要通过一定的算法进行信号拼接!以获得真实的一维距离像,在较高采样率的条件下!该算法可以选取最优的处理结果!这就是-目标抽取算法.’/0/目标抽取算法目标抽取算法就是为了得到完备的一维距离像!它完成以下"个工作12将折叠的结果按照真实距离排列,3在不同采样点中的冗余信息中!按照一定准则!选取一个最好的结果!得到与真实情况相符的最优的一维距离像’目标抽取算法在紧约束条件和宽约束条件下略有不同!以下先介绍紧约束条件下的目标抽取’456紧约束条件下的目标抽取要进行目标抽取算法!关键是要确定每组())*结果中任意点的真实距离’对式476进行())*变换有8496:;<=5>:?@A B C =D "E >F G <H @A B C D "E >9G <H 4I 6显然!当9:F J K <4K:任意整数6时!上式达到最大值’也就是说!())*结果的第9个点代表的实际距离可能是4K <J 96L M :K M (J 9L M !其中9:?!5!"000<=5!L M 为最小距离分辨单元’这在本质上是())*的周期延拓性的体现’而实际上!由于每个采样点代表的距离信息都是有限的!对于第N 个采样点())*结果中的第9个点来说!K 只能取一个值’对于第N 个采样点!其())*结果代表的距离范围是N M $%M N O N M $J M &N :?!5!"P 4Q 6在紧约束条件下!已知N !9!就可以确定唯一的K !从而可以确定第N 个采样点())*结果中第9点的真实距离’在工程实现上!目标抽取的方法非常简单’单独考察式4I 6!如果第N 个采样点())*结果中第9点出现目标!那么该目标可能出现在任意采样点())*结果的第9点上’对于第N 个采样点!可以将其())*结果进行周期延拓!得到一个足够长的序列’该序列起点代表距离?!终点代表的距离大于N M $J M &’然后取出N M $至N M $J M &的一段!就可以得到长度为M &的真实一维距离像!也就是说得到将这个采样点中所有的距离信息!如图5所示’图5利用周期延拓进行目标抽取)R S 05*T U S @V @A V U T W V R X YZ [W [W \R W @A V U T B X \T V R X Y通常!相邻"个采样点的目标抽取结果在距离上是部分重合的!可以根据一定策略!得到一个最优的像素’通常采用的是-同距离舍弃法.+-同距离选大法.+-同距离累加法.等等’这里]种处理策略的意义如下1同距离舍弃法就是简单地选取后面采样点的处理结果!舍弃已有的提取结果’这种方法的不保证提取后的结果是最优的!有较大的采样幅度损失’同距离选大法是在不同采样点())*结果中选取较大数值作为目标抽取的结果!使采样幅度损失降到最低!但是对于噪声或杂波也进行了选大操作’而同距离累加法就是将同一目标在不同采样点的结果互相叠加!由于噪声的相关性要远低于目标的相关性!所以可以达到最大的信噪比!但是不保证目标之间的幅度关系’4"6宽约束条件下的目标抽取在宽约束条件下!每个采样点())*结果都有被污染的部分!对单独一个采样点来说!是无法恢复的’但是可以将被污染的部分用其他采样点的结果替换’在目标抽取时!要保证污染区的内容不被提取’可以算出污染区的长度为M &=M (!对于某个采样点所对应的距离范围来说!污染总是发生在起始和结束部分’所以只要在目标抽取时将污染Q5^航空学报第""________________________________________________________________卷区避开即可!如图"所示#图"利用周期延拓进行目标抽取$%&’"()*&+,+-,*).,%/012.2.3%.+-,*)4/3),%/0可见!对第5个采样点的6$$(结果作周期延拓后!取出其中的5789:7;<76=>?7@75A57897B<:7B<*6=>?75C D!E!"!F:G=就可以获得完整的一维距离像#由上述分析可见!本文提出的目标抽取算法非常适用于工程需要#以下给出仿真结果H仿真条件H I C E"J!?K C J LM N!K8C O D LM N!此时?7C D’E P Q P J R!设立O个静止目标!位置分别为S E C Q D R!S"CQ T R!S O C Q Q R!U>I C E D V W!回波形状为高斯形!根部宽度为;C E D D08!采样频率K8C O D LM N前"D个采样点的6$$(结果及目标抽取结果如图O所示#图O目标抽取算法仿真:)=6$$(结果!目标出现在G XE E个采样点中Y:1=同距离舍弃法提取结果:.=同距离选大法提取结果Y:V=同距离累加法提取结果$%&’O Z%R[3),%/0/\,)*&+,+-,*).,%/0)3&/*%,]R图O:)=的第G个采样点的尖峰为目标E!第E D个采样点中的"个尖峰分别为目标E^目标"!第E E个采样点中的"个尖峰分别为目标"^目标O!但仅仅从6$$(结果很难反映出真实目标个数与相对位置关系#图O:1=是同距离舍弃法的提取结果!可以反映出目标的相对位置关系!但幅度较小!尤其第O个目标几乎全部被掩盖在噪声中Y而同距离选大法的结果图O:.=明显优于舍弃法!将其与3,[O:)=仔细比较可以看到每个目标都是各采样点中最大的Y而同距离累加法的结果图O:V=与选大法类似!而信噪比略高#GEZ增刊毛二可等H_ _______________________________________________________________频率步进雷达数字信号处理!"#多普勒效应的影响及其补偿$%&多普勒效应的影响由于频率步进信号数据率较低’是一种多普勒敏感信号’所以在实际应用中必须考虑目标的多普勒效应(文献)%%*在这方面进行了深入的研究’指出+目标运动会给回波造成附加的一次相位相和二次相位项(设目标速度为,’则一次相位项为-./$0123$0,45&678&$%3&二次相位项为-./$09:2$0,45&6078&$%%&其中’一次相位项会在;<<=结果中产生耦合时移’该误差与,成正比>二次相位项主要会使;<<=结果能量发散’其程度也与,成正比(对于目标抽取算法’一次相位项主要造成测距不准’而二次相位项会产生伪峰和幅度损失(可见’频率步进信号的多普勒效应比较严重’必须加以补偿(文献)%%*指出’一次相位项对补偿精度要求非常苛刻’典型参数下要求误差在%4@数量级(而二次相位项比较容易补偿’典型参数误差容限为%334@数量级($0&已有的多普勒效应补偿方法在目前已经提出的主要运动补偿算法中’文献)%A *针对调频步进脉冲串信号’提出了距离B 速度B 加速度的极大似然估计方法>它给出了距离B 速度B 加速度估计的最佳理论’但是实际可操作性并不强(由于目标运动会产生耦合时移’文献)%C *提出利用这一特性’从静止杂波中区分出运动目标的方法(它是在滤除杂波后’再对纯目标的频域数据做速度补偿(但是这里的速度补偿方法需要通过其它手段获得目标的速度信息(文献)%D *提出了一种频率步进脉冲E 组F 串的方法’即在每一个频点上发射一组脉冲’通过脉组之内的<<=处理获得目标速度’再通过脉组之间的;<<=处理获得距离高分辨率的效果(文献)03*提出了G 种运动补偿方法+频域互相关法B 时域互相关法B 及最小熵值法(其中频域互相关法就是对;<<=之前相邻两帧的回波求互相关’根据相关输出的相位估计目标运动速度(所谓时域互相关法’是指在做了;<<=之后进行相关(其基本思想’是利用两帧之间对应脉冲的相关’求出目标在两帧之间的距离走动’并进而利用走动距离和目标速度之间的关系估计目标速度(所谓最小熵法’是一种闭环迭代算法’根据该文的分析’其实时性较差’且精度与信噪比成反比(文献)0%H0I *对这个问题进行了系统的研究’主要从模糊函数的角度出发’分析了采用正负双向调频和随机跳频的方法实现目标运动补偿(它主要是通过特殊的信号设计方法’使信号的模糊函数具有近似图钉形状(实际上’这种方法在D 3年代初即有人考虑)0J *(此外’文献)0K *提出了一种通过参差L M =实现运动补偿的方法’文献)0A *对此方法进行了进一步深入的研究’指出这种方法对雷达系统参数要求过于苛刻’因此实际上很难实用($G &各种多普勒效应补偿方法的分析N 有附加测速信息的运动补偿如果能够不断通过其它手段获得目标的速度信息’则运动目标的处理将十分简单’只要在;<<=处理之前’把目标运动的多普勒频率在相位中减掉即可’这可以通过一个简单的乘法运算来实现(这种补偿方法’在有搜索雷达引导的跟踪雷达系统中是可能的(这种方法的主要问题’是对目标运动速度的测量精度要求极高>为完全补偿掉一次相位误差’对测速精度的要求可以达到%?4@量级’这在一般的搜索雷达系统中是很难达到的(因此用这种方法很难完全消除多普勒的影响(但是用这种方法基本上可以消除二次相位的影响’因为这时对测速精度的要求为%33?4@量级(因此这种方法可以用它来做速度初补偿’以便消除二次相位的影响’使;O <=输出不再发散(这样’就可以为后续的进一步运动补偿奠定基础(P 利用距离变化率进行运动补偿对于有跟踪能力的雷达系统’可以通过跟踪滤波器获得目标运动的精确速度估值’并由此进行运动补偿(这种方法的主要问题’是目标运动状态和跟踪滤波器的设置(如果目标为匀速直线运动’则通过合适的跟踪滤波器即可以获得好的速度估计’并用于补偿目标运动造成的影响(这种方法对理想匀速运动目标应具有良好的效果’但是对于目标速度变化的情况’补偿效果一般不能令人满意)0C *(Q 脉冲多普勒测速方法这种方法是在频率步进工作过程中加入脉冲多普勒测速’以获得目标的速度估计(其中文献)%D ’03*所提的方法都属于这一类型(但是文献)%D *所提出的方法’其主要问题是帧周期很长’因此数据率很低>而且’在整个处理帧中’如果目标有加速度’则补偿的效果会变差(此外’为避免测速模糊问题’该方法必30R 航空学报第00S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S S 卷须选择较小的!"#$这样就又存在测距模糊%而在文献&’()所提出的频域互相关法中$同样存在不模糊测速范围小的问题*其解决方案$是采用时域互相关法确定速度范围$但是根据该文的分析$时域互相关法的精度并不高%+二维高分辨率自测速方法所谓二维高分辨率自测速方法$就是在处理过程中$用多组速度值进行补偿$选出其中补偿最好的速度值$即可同时获得目标的距离,速度二维信息%文献&’-.’/)所提出的方案$都属于此种类型%由于这种方案需要选择最优的补偿速度$因此频率步进信号必须对速度的变化敏感$故必须选择具有近似图钉型模糊函数的随机跳频信号%其中文献&’-$’’)所提出的双向调频信号就是向图钉型模糊函数迈进了一步&’0)$但是它相对于线性步进频信号的好处只有123%文献&’4$’5)则提出了一种最优随机跳频序列的编码方案%这里$双向调频在实现中有很多问题$例如在目标存在多个散射中心的情况下如何判断散射点的配对情况%而且$对于目标加速运动的情况下$根据式6-’7$在正向和负向调频的两帧之间$目标运动速度也会发生变化$因此补偿的难度还会增加%而对于文献&’4$’5)所提出的随机跳频方案$需要进行二维高分辨率处理$因此信号处理量会大大增加%此外$89:$子波变换等方法$也都可以作为二维补偿方法的尝试%;帧间脉冲多普勒所谓帧间脉冲多普勒$也是一种可能的目标运动补偿算法%它是发射多个频率步进脉冲串$在不同脉冲串中相同载频的脉冲之间做脉冲多普勒测速处理*获得目标速度后$再做脉冲串内的<==#处理$获得目标的一维高分辨率距离像%但是这种方法的主要缺点$是有很大的测速模糊%>降阶处理估计目标运动参数由于目标运动速度造成的二次相位项实际上是一个线性调频项$因此可以采用线性调频信号处理中常用的降阶方法$但是测速精度相对较差%@A频率步进信号与B C D E F信号的兼容性要想在保证总带宽不变的条件下$提高频率步进信号的数据率$则应该减小频率步进的阶数G$提高单个子脉冲的带宽H I*但是提高子脉冲的带宽意味着脉冲时宽J的减小$因此信号的发射能量将减小$进而限制雷达的作用距离%要解决这一矛盾$可以采用线性调频信号6即K L M N O信号7作为频率步进的子脉冲$文献&-’)称之为P调频步进雷达信号Q*这种信号的优点是在保持频率步进发射信号脉宽J和总带宽R不变的同时减小步进阶跃的周期数G$提高系统的数据率%或者是在R与G不变的条件下增大J$提高发射能量%这种信号在实现距离高分辨率方面具有K L M N O信号和频率步进信号的优点%6-7调频步进信号形式及基本处理策略调频步进信号第S个字脉冲的形式如下式所示T6U7V-W GX G,-S V(Y6U,S Z N7[\O&]’^S H I)_ [\O&]’^I(U)V-W GJX G,-S V(N[‘aU,S Z Nb cJ_ [\O&]^d6U,S Z N7’)[\O&]’^S H I)_[\O&]’^I(U)6-’7其中e Y6U7V-W JN[‘aUb c J[]^d6U,S Z N7’为K L M N O子脉冲*d V H I f J是调频斜率%可见调频步进的信号带宽依然为GH I%对上述信号进行混频后有如下结果T6U7V XG,-S V(g S N[‘aU,S Z N,’6h,i U7f jb cJ_ [\O k]^d&U,S Z N,’6h,i U7f j7)’l_[\O&,]’^S H I’6h,i U7f j)_[\O&,]’^I(’6h,i U7f j)6-47文献&-’)指出$对调频步进信号的处理可以分’个步骤e首先在各个子脉冲内进行K L M N O脉冲压缩*其次在脉冲压缩后进行各脉冲之间的<:=#处理%当目标速度为(时处理结果依然为式617所示$距离分辨率提高了G倍%对频率步进信号作<==#处理时$要求信号在各脉冲之间具有严格的相位关系$因此K L M N O 信号脉压后信号相位的变化是这种信号处理中最关键的问题%如果目标速度i m($则雷达视频回波的幅度和相位都会发生复杂的变化%6’7调频步进信号的多普勒效应分析由于调频步进信号的视频回波在不同!"#之间的变化与频率步进信号相同$因此在信号处理上要重点分析目标运动对子脉冲压缩的影响%文献&-’)指出$如果要求目标在G个!"#之内的最大时移为半个脉压后的距离单元$则要求雷达系统参数设计应该满足’i GZ N f no-f6’p I7而多普勒效应对K L M N O信号脉压产生的幅度变化q耦合时移q相位变化对<==#的影响基本可以-’r增刊毛二可等es s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s频率步进雷达数字信号处理忽略不计!这是因为"#$%&信号数据率较高’是一种非多普勒敏感形信号!当参数设计合理的条件下’对于调频步进信号处理的多普勒补偿的主要问题仍然是在())*阶段!而采用调频步进体制可以有效的减小+的值’减轻多普勒效应对())*的影响!,-.调频步进数字信号处理的实现根据以上分析’可以给出一个调频步进信号处理的实现方案’如图/所示!图/调频步进数字信号处理机功能框图)$01/234567$80%894:;#<7$0$;83=$0>83&%45<==4%:4%)?=;<&@:%<A B <>5C%878%<5#4由于这个方案的数据具有运算复杂D 数据量大等特点’对数字信号处理器的设计具有较高的要求!选用多片*?E -F G "H I 作为核心J E K 芯片!该芯片采用了甚长指令字,L M (N .的体系结构O 片内有P 个并行处理单元’可同时运行P 条指令Q 其最高时钟频率可达F G G ?R S ’单指令周期为T >=’因此最大处理能力为U H G G ?(K =!采用这种芯片实现该方案在速度上具有极大的优势!V 1W 频率步进与圆锥扫描兼容性的研究在现代跟踪雷达中’通常在要求系统具有精细的距离分辨率的同时获得准确的角度信息!采用圆锥扫描方法获得目标角度是一种经典的技术’它利用目标回波的幅度变化来获得角度信息’由于其技术较为成熟’已经得到了广泛的运用!锥扫频率步进信号就是这二者的结合’该信号具有在保证距离高分辨率的同时实现精确测角的特点!,U .锥扫频率步进信号形式及基本处理策略设角误差信号测角率为X ’它表示单位角误差信号所引起的调制度Q 天线锥扫频率为Y 8Q 雷达位于Z [点’扫描圆心为Z Q 目标位于\点Q ]轴代表天线锥扫的基准时刻Q 角误差信号为^Q _G 是锥扫信号的初相位Q ‘]’‘a 分别为方位和俯仰角度’如图T 所示!显然’在天线锥扫一周的时间内’可以有b cU d ,Y 8+e %.帧的数据!当目标速度为G 时’对于第f 帧中第g个脉冲’则锥扫频率步进的表达式为],g .c h U i X ^54=j F k Y 8,f +e %i g e %i F l d m .i _G n o <I &j p q F r ,Y G i $s Y .F l d m n f c G ’U ’F ’tb p U Qg c G ’U ’F ’t+p U ,U /.由上式可以看出’圆锥扫描是作为调制信号叠加在频率步进的幅度上的!它对于频率步进信号来说是一个非均匀加权!测角率为X 越大’表示雷达测角的灵敏度越高’但是对频率步进信号的调制度就越深!这会造成主瓣峰值损失D 主瓣展宽D旁瓣提高等问题!图T 圆锥扫描示意图)$01T J <94>=;%8;$4>:4;#<&%$>5$&3<4:54>$583=58>而频率步进信号对于锥扫信号来说是等间隔采样’其采样间隔为+e %!这会造成角度信息减少’抗噪声能力下降’测角不准等问题!当F Y 8u U d +e %时还会出现欠抽样!对于锥扫频率步进信号的处理’要求既获得距离上的高分辨率的一维距离像’同时要获得目标的角度信息!这里处理的关键是角度信息的获取!如果希望获得目标细节的角度信息’必须在())*之后进行锥扫!对式,U /.进行归一化并())*后可以得到v ,w .c +i X ^=$>,k x d b.=$>,k x d ,b+..y54=F k xb f i z +F e %{|s Y j i_G ik x b +p U n+’w c z G ’w c }~!其它,U T .式中O wcG ’U ’F t +pU Q f cG ’U ’F t b pU Q x c FF E 航空学报第F F """"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""卷。
雷达测频方法
雷达测频的方法主要包括频域测频法和时域反射法。
对于频域测频法,主要步骤包括设置测试仪器、将信号源连接到雷达的发射端口并设置发射频率范围、将频谱分析仪连接到雷达的接收端口并设置扫描范围和步长、开始测试并记录信号强度,最后通过分析扫描结果确定雷达的工作频段。
时域反射法则是利用雷达在传输线或天线端口处的反射波来测试雷达的频率响应特性。
具体步骤包括选取合适的反射器,在雷达系统中插入反射器并填入所需的测试频段,最后通过测量反射器产生的反射波和传输线上的传输波来分析雷达的频率响应特性。
以上内容仅供参考,可以查阅专业雷达书籍获取更全面和准确的信息。
X波段频率步进雷达系统误差校正作者:张炜来源:《数字技术与应用》2019年第04期摘要:X波段雷达已越来越多的在机场场面监视领域得到应用。
X波段雷达较红外、光学、KU波段雷达等探测手段受天气环境等外界因素影响较小,可以实现全天时、全天候对目标进行探测。
目前我国各大机场都部署了SCANTER5000系列X场面监视雷达。
本文将对X 波段频率步进雷达系统误差的校正方法进行分析,并提出一种可能应用于机场场面监视雷达的系统误差校正方法。
关键词:民航;场面监视;频率步进;系统误差中图分类号:TN957.5 文献标识码:A 文章编号:1007-9416(2019)04-0112-021 系统误差校正原理雷达系统误差校正可以分成时域校准法和频域校正法两种方法。
文献[1,2]提出了从单个点频测试信号推导的系数来校正正交解调I、Q两路信号幅相误差,该方法属于时域校正法,一般适用于解决正交解调幅相不一致性,而无法校正由于系统其它部分带来的误差。
频域法通过发射信号和接收信号测得系统的传函,并计算出校正传函,再利用校正传递函数对含有畸变特性的信号进行处理,从而获得理论上没有畸变的信号。
包含在接收端进行的均衡和在发射端进行的预畸两种方法,后者会导致硬件实现的难度增大而前者可以使用软件实现。
本文讨论的重点是使用均衡法进行畸变校正。
回波幅度为σ0的静止点目标对应的基带回波表达式如下:2 系统误差校正效果验证基于X波段频率步进雷达系统构建自闭换系统,模拟理想点目标回波,获得自闭换数据,用于验证上小节所述系统幅/相误差校正原理。
模拟的理想点目标回波经采集器得到原始回波脉压后幅度特性和相位特性以及利用频域拼接法合成一维高分辨距离像如图1~图2所示。
图1左图为一帧回波脉压峰值幅度误差曲线,误差为5dB。
右图为一帧回波脉压峰值相位曲线及拟合曲线。
图2左图为加窗前高分辨像,右图为加窗后高分辨像,主副瓣比为20dB。
2.1 只校正幅度畸变对回波信号采集脉压后,只进行幅度畸变校正,不进行相位畸变校正,分别观察脉压幅度和相位曲线和利用频域拼接法合成一维高分辨距离像如图3~图4所示。
任务书雷达进行PD测速主要是利用了目标回波中携带的多普勒信息,在频域实现目标和杂波的分离,它可以把位于特定距离上、具有特定多普勒频移的目标回波检测出来,而把其他的杂波和干扰滤除。
因此要求雷达必须具备很强的抑制杂波的能力,能在较强的杂波背景中分辨出运动目标的回波。
如今,不管是在军用还是民用上,雷达都在发挥着它很早重要的作用,与早期雷达采用距离微分方法测速相比,基于脉冲多普勒理论的雷达测速技术具有实时性好、精度高等优点。
特别是现代相控阵技术在雷达领域的应用,实现了波束的无惯性扫描和工作方式的快速切换,更便于应用脉冲多普勒技术进行雷达测速。
本篇课程设计目的在于介绍脉冲多普勒雷达测速的原理,并对这种技术进行介绍和仿真。
摘要脉冲多普勒(PD)雷达以其卓越的杂波抑制性能受到世人瞩目。
现代飞行器性能的改进和导航手段的加强,使其能在低空和超低空飞行,因此防御低空入侵己成重要问题,由此要求机载雷达,包括预警机雷达和机载火控雷达具有下视能力,即要求能在强的地杂波背景中发现微弱的目标信号,所以现代的预警机雷达和机载火控雷达皆采用PD体制。
脉冲多普勒雷达包含了连续波雷达和脉冲雷达两方面的优点,它具有较高的速度分辨能力,从而可以更有效地解决抑制极强的地杂波干扰问题;此外,脉冲多普勒雷达能够同时敏感地测定距离和速度信息;能够利用多普勒处理技术实现高分辨率的合成孔径图像;而且亦具有良好的抗消极干扰能力和抗积极干扰能力。
本文介绍了脉冲多普勒雷达测速的原理,信号处理。
并用matlab简单的仿真了雷达系统对信号的处理.关键词:脉冲多普勒雷达恒虚警脉冲压缩线性调频AbstactPulse Doppler (PD) radar is famous for it`s outsdanding clutter suppression.Modern aircraft`s function and GPS has been strengthen.now.it makes the aircraft can fly lower and lower.So.nowadays,Defensing.Low altitude invasion has been an important problem.so we require airborne radar. Early warning radar and airborne fire control radar have the ability to look down.That is to say.The radar is be required the ability to find Weak target signal in the strong Groung clutter.So .The modern airborne early warning radar and airborne fire control radar use the PD system.Pulse Doppler (PD) radar concludes two adervantages of Continuous wave radar and impulse radar.It has a higher velocity resolution.thus it can effectively.soveing the problem of strong ground clutter.what`s more.Pulse Dppler (PD) radar can Sensitive text the Distance and speed on the same time.Itcan use Doppler processing technology to realise Synthetic aperture images with high resolution.This article sinply introduced principle of pulse Doppler radar and signaling matlab to simulation The signal processing of radar system.Linear frequency modulation.Keywords:Pulse Doppler (PD) radar.Constant false alarm rate .pulse compression.目录一.脉冲多普雷达简介 (1)1,多普勒效应 (1)二、多普勒测速原理 (2)三、多普勒雷达简介 (4)四、多普勒雷达工作原理 (6)五、PD雷达信号处理仿真 (8)5.1、正交双通道处理 (9)5.2、脉冲压缩 (10)5.3、线性调频信号的脉冲压缩 (12)5.4、巴克码信号的脉冲压缩 (14)5.5、恒虚警处理 (14)5.5.1、单元平均恒虚警处理(CA-CFAR) (16)5.5.2、平均选大恒虚警处理(GO-CFAR) (16)5.6、动目标检测(MTD)模型 (19)六、总结与展望 (20)参考文献 (21)二、脉冲多普雷达简介1,多普勒效应多普勒效应是指当发射源和接收者之间有相对径向运动时,接收到的信号将发生变化。
适合雷达初学者:线性调频脉冲雷达仿真实验教程(含MATLAB代码和教程)今天给大家分享的是一个脉冲雷达MATLAB仿真小实验,这个实验是调皮哥刚进研究生时学习的入门教程,比较简单,特别适合于初学者。
同时这个也是研究生一年级里面的实验课程,不过现在这个课程已经更新了,更新之后的内容就是调皮哥之前说的采用TI毫米波雷达那个,是由调皮哥亲自帮助导师设计的,现在那个课程已经上了两年多了,今年又更新了一些内容。
虽然这个脉冲雷达MATLAB仿真小实验经过了十多年的时间现在已经退出了历史的舞台,但是其内容依旧适合大家学习。
就在之前,有读者向我咨询有没有相关的内容,于是我就准备今天给大家分享,,希望早一些帮助到大家,文末提供了下载方式。
这个小实验内容不多,两个程序,一份报告,报告是调皮哥自己的课程作业。
MATLAB程序主要完成16个调频脉冲信号的产生、脉冲压缩、MTI、MTD、CFAR等信号处理算法,共计200多行。
报告的内容就是对实验内容的解析和分析,大家可以参照理解和学习,因此我就不再对代码进行一一解释了,代码中也有一些注释,相信大家花点功夫应该能够看得懂的。
具体内容大家可以详细见教程,这里就不再进行过多的论述。
后续还有几个小问题,可以分享给大家:(1)线性调频信号的特点。
为什么选用线性调频信号?答:线性调频信号的频率随时间呈线性变化,选用线性调频信号可以增大发射信号的带宽,提高平均发射功率,同时又有较高的距离分辨率。
(2)为什么要做脉冲压缩答:为了获得大的作用距离和具有很高的距离分辨率。
(3)时域脉压和频域脉压分别怎么做?答:通过对发射信号进行序列反转、取共轭操作即可得到脉冲压缩系数。
时域脉冲压缩处理是对回波信号与脉冲压缩系数进行卷积。
频域是先对回波信号和脉压系数做FFT,点乘之后在做IFFT(逆快速傅里叶变换)。
(4)PC(脉冲压缩)结束后三个目标高度为什么不一样,呈什么变化,为什么?答:第一个脉冲有部分处于闭锁期,因此幅度较小。
频率步进雷达导引头信号处理系统研究的开题报告一、选题背景频率步进雷达导弹是一种基于频率步进调制技术的导弹制导方式,具有制导精度高、对抗干扰能力强等优点,在现代导弹制导技术中得到了广泛应用。
而在频率步进雷达导弹中,导引头信号处理系统是重要的关键技术之一,直接影响着制导精度和抗干扰能力。
二、研究内容本研究将围绕频率步进雷达导引头信号处理系统展开深入研究,主要涉及以下内容:1. 频率步进雷达信号的特点和工作原理:介绍频率步进雷达导弹的制导原理、发射信号结构和接收信号特点,为后续的信号处理提供信号基础。
2. 多普勒频移与速度估计:针对频率步进雷达信号中的多普勒频移进行分析,设计实现相应的速度估计算法,以提高制导精度。
3. 抗干扰技术研究:由于频率步进雷达信号易受到各种干扰的影响,本研究将针对不同类型的干扰进行分析和研究,提出相应的抗干扰策略和方法。
4. 信号处理系统设计与实现:根据以上分析和研究结果,设计并实现适用于频率步进雷达导引头的信号处理系统,包括信号采集、处理和输出等。
三、研究意义本研究的意义在于对频率步进雷达导引头信号处理系统进行深入研究,提高频率步进雷达导弹的制导精度和抗干扰能力,推动我国导弹制导技术的发展。
此外,本研究还可以为相关企业提供技术支持和参考,促进国防工业的发展。
四、研究方法与进度安排本研究将采用理论研究、模拟仿真和实验验证相结合的方法进行。
具体进度安排如下:第一阶段:频率步进雷达信号的分析与建模第二阶段:多普勒频移与速度估计算法设计与仿真第三阶段:干扰分析与抗干扰技术研究第四阶段:信号处理系统设计与实现最后进行实验验证和性能测试,撰写毕业论文并进行答辩。
五、预期成果1. 针对频率步进雷达导弹制导的特点,提出适合的信号处理方法和策略。
2. 设计并实现适用于频率步进雷达导引头的信号处理系统,包括信号采集、处理和输出等,并在实验中进行性能测试和优化。
3. 提升我国导弹制导技术水平,为国防安全和相关企业技术发展提供支持和参考。
雷达回波信号模拟与仿真雷达回波信号模拟与仿真雷达回波信号模拟与仿真是雷达技术发展中非常重要的一部分,它在雷达系统的设计、性能评估和算法验证中发挥着关键作用。
本文将介绍雷达回波信号模拟与仿真的基本概念、方法和应用。
一、雷达回波信号模拟与仿真的基本概念雷达回波信号模拟与仿真是指通过计算机模拟和仿真技术,生成具有真实性、可控性和可重现性的雷达回波信号。
它以真实场景为依据,通过仿真模型和算法,模拟目标物体对雷达的散射特性和回波信号,以实现对雷达系统的功能验证、性能评估和算法研究。
在雷达回波信号模拟与仿真中,需要考虑的主要因素包括目标物体的散射特性、雷达系统的工作模式和参数、雷达的辐射特性以及信号处理算法等。
通过合理的模型和算法,对这些因素进行综合分析和计算,便可生成具有相应特征的雷达回波信号。
二、雷达回波信号模拟与仿真的方法雷达回波信号模拟与仿真方法主要包括数值计算和物理模型两种。
数值计算方法是基于数学和物理公式,通过模拟目标物体的散射过程,计算出目标物体对雷达的回波信号。
这种方法常用的数值计算技术有有限差分法、有限元法、边界元法等。
数值计算方法的优点是计算结果准确,但计算量较大,对计算机资源要求较高。
物理模型方法是基于实际物理模型的建立,通过实验或测量得到目标物体的散射特性,再根据雷达系统的参数和辐射特性进行模拟和计算。
这种方法的优点是简单直观,但模型的准确性对结果产生很大影响。
三、雷达回波信号模拟与仿真的应用雷达回波信号模拟与仿真广泛应用于雷达系统的设计、性能评估和算法验证等方面。
在雷达系统的设计中,回波信号模拟与仿真可用于评估不同参数设置对系统性能的影响,以指导设计优化。
通过模拟和比较不同系统参数下的回波信号,可以选择最优配置,提高系统性能。
在雷达系统的性能评估中,回波信号模拟与仿真可用于模拟不同目标物体对雷达的散射特性,评估系统对不同目标的检测能力和跟踪性能。
通过改变目标物体的尺寸、形状、材料等参数,模拟不同场景下的回波信号,并与实际测量数据进行比对,从而评估系统的性能和误差。
线性调频(LFM )脉冲压缩雷达仿真一. 雷达工作原理雷达是Radar(RAdio Detection And Ranging )的音译词,意为“无线电检测和测距”,即利用无线电波来检测目标并测定目标的位置,这也是雷达设备在最初阶段的功能.典型的雷达系统如图1.1,它主要由发射机,天线,接收机,数据处理,定时控制,显示等设备组成。
利用雷达可以获知目标的有无,目标斜距,目标角位置,目标相对速度等。
现代高分辨雷达扩展了原始雷达概念,使它具有对运动目标(飞机,导弹等)和区域目标(地面等)成像和识别的能力。
雷达的应用越来越广泛。
图1.1:简单脉冲雷达系统框图雷达发射机的任务是产生符合要求的雷达波形(Radar Waveform ),然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由接收机接收,对雷达回波信号做适当的处理就可以获知目标的相关信息。
假设理想点目标与雷达的相对距离为R,为了探测这个目标,雷达发射信号()s t ,电磁波以光速C 向四周传播,经过时间R C 后电磁波到达目标,照射到目标上的电磁波可写成:()Rs t C-.电磁波与目标相互作用,一部分电磁波被目标散射,被反射的电磁波为()R s t Cσ⋅-,其中σ为目标的雷达散射截面(Radar Cross Section ,简称RCS),反映目标对电磁波的散射能力。
再经过时间R C 后,被雷达接收天线接收的信号为(2)Rs t Cσ⋅-。
如果将雷达天线和目标看作一个系统,便得到如图1。
2的等效,而且这是一个LTI (线性时不变)系统.图1。
2:雷达等效于LTI 系统等效LTI 系统的冲击响应可写成:1()()Mi i i h t t σδτ==-∑ (1。
1)M 表示目标的个数,i σ是目标散射特性,i τ是光速在雷达与目标之间往返一次的时间,2ii R cτ=(1.2)式中,i R 为第i 个目标与雷达的相对距离.雷达发射信号()s t 经过该LTI 系统,得输出信号(即雷达的回波信号)()r s t :11()()*()()*()()M Mr i i i i i i s t s t h t s t t s t σδτστ====-=-∑∑ (1.3)那么,怎样从雷达回波信号()r s t 提取出表征目标特性的i τ(表征相对距离)和i σ(表征目标反射特性)呢?常用的方法是让()r s t 通过雷达发射信号()s t 的匹配滤波器,如图1。
频率步进雷达系统的仿真与测试其实那么复杂
任何雷达接收机接收到的回波信号都包含目标回波和背景杂波。
要在包含背景杂波的环境中探测目标,雷达系统必须具有远距离和宽范围的分辨能力。
过去一般使用短脉冲波形和宽带调频脉冲来实现这一目标。
不过,这种方法需要采用非常复杂的系统体系结构,而且由于用到宽带接收机,所以实施成本较高。
另一种方法是采用频率步进雷达(SFR),它能够在不增加系统复杂程度的同时分辨远距离目标,在无损测试和地面搜索应用中表现出色。
SFR可以在频域中合成频率步进脉冲回波,以获得更宽的信号带宽;使用跳频实现高分辨率和高信噪比。
凭借高分辨率和低成本的优势,频率步进雷达现已广泛应用于商业与航空航天/国防(A/D)领域。
不过,受地面、建筑物和植物等物体反射的背景杂波的影响,很难对SRF接收机性能进行准确的分析。
因此,仿真变得尤为重要。
它可帮助设计人员精确设计、验证和测试真实环境中的SFR系统,因此,它是设计人员不可或缺的重要工具。
了解SFR
为了更好地了解SFR为什幺能提供如此先进的能力,我们首先以图1(最左侧图像)所示的脉冲雷达波形为例进行说明。
图1:左侧是脉冲雷达波形,右侧的图像为SFR波形。
假定脉宽为τ,信号带宽为f0 = 1/τ,那幺根据下式可计算出距离分辨率Rs:
其中,c 等于光速。
假设脉宽τ=0.25us,脉冲重复间隔T=10us,那幺距离分辨率Rs=37.5m。
要。