最小二乘参数辨识方法及原理
- 格式:pptx
- 大小:5.55 MB
- 文档页数:101
最小二乘法的原理及其应用-CAL-FENGHAI.-(YICAI)-Company One1最小二乘法的原理及其应用一、研究背景在科学研究中,为了揭示某些相关量之间的关系,找出其规律,往往需要做数据拟合,其常用方法一般有传统的插值法、最佳一致逼近多项式、最佳平方逼近、最小二乘拟合、三角函数逼近、帕德(Pade)逼近等,以及现代的神经网络逼近、模糊逼近、支持向量机函数逼近、小波理论等。
其中,最小二乘法是一种最基本、最重要的计算技巧与方法。
它在建模中有着广泛的应用,用这一理论解决讨论问题简明、清晰,特别在大量数据分析的研究中具有十分重要的作用和地位。
随着最小二乘理论不断的完善,其基本理论与应用已经成为一个不容忽视的研究课题。
本文着重讨论最小二乘法在化学生产以及系统识别中的应用。
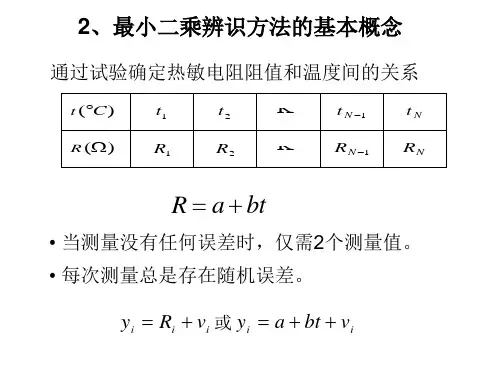
二、最小二乘法的原理人们对由某一变量t或多个变量t1…..tn 构成的相关变量y感兴趣。
如弹簧的形变与所用的力相关,一个企业的盈利与其营业额,投资收益和原始资本有关。
为了得到这些变量同y之间的关系,便用不相关变量去构建y,使用如下函数模型,q个相关变量或p个附加的相关变量去拟和。
通常人们将一个可能的、对不相关变量t的构成都无困难的函数类型充作函数模型(如抛物线函数或指数函数)。
参数x是为了使所选择的函数模型同观测值y相匹配。
(如在测量弹簧形变时,必须将所用的力与弹簧的膨胀系数联系起来)。
其目标是合适地选择参数,使函数模型最好的拟合观测值。
一般情况下,观测值远多于所选择的参数。
其次的问题是怎样判断不同拟合的质量。
高斯和勒让德的方法是,假设测量误差的平均值为0。
令每一个测量误差对应一个变量并与其它测量误差不相关(随机无关)。
人们假设,在测量误差中绝对不含系统误差,它们应该是纯偶然误差,围绕真值波动。
除此之外,测量误差符合正态分布,这保证了偏差值在最后的结果y上忽略不计。
确定拟合的标准应该被重视,并小心选择,较大误差的测量值应被赋予较小的权。
电机动态参数的鲁棒最小二乘辨识方法研究电机动态参数的鲁棒最小二乘辨识方法是一种常用的电机参数辨识方法,它可以通过对电机的输入输出数据进行处理,得到电机的动态参数,从而实现对电机的控制和优化。
本文将介绍电机动态参数的鲁棒最小二乘辨识方法的研究。
一、电机动态参数的鲁棒最小二乘辨识方法的基本原理电机动态参数的鲁棒最小二乘辨识方法是一种基于最小二乘法的电机参数辨识方法。
它的基本原理是利用电机的输入输出数据,通过最小二乘法对电机的动态参数进行辨识。
具体来说,它可以通过以下步骤实现:1. 收集电机的输入输出数据,包括电机的电流、电压、速度、位置等参数。
2. 建立电机的动态模型,包括电机的电路模型和机械模型。
3. 利用最小二乘法对电机的动态参数进行辨识,包括电机的电阻、电感、转动惯量、摩擦系数等参数。
4. 对辨识结果进行鲁棒性分析,评估辨识结果的可靠性和精度。
二、电机动态参数的鲁棒最小二乘辨识方法的研究进展电机动态参数的鲁棒最小二乘辨识方法是一种经典的电机参数辨识方法,已经得到了广泛的应用和研究。
近年来,随着电机控制技术的不断发展和电机应用领域的不断拓展,电机动态参数的鲁棒最小二乘辨识方法也得到了进一步的研究和改进。
1. 基于神经网络的电机参数辨识方法神经网络是一种强大的模式识别和数据处理工具,已经被广泛应用于电机参数辨识领域。
基于神经网络的电机参数辨识方法可以通过对电机的输入输出数据进行训练,得到电机的动态参数,具有较高的精度和鲁棒性。
2. 基于模糊逻辑的电机参数辨识方法模糊逻辑是一种基于模糊集合理论的推理方法,可以处理不确定性和模糊性问题。
基于模糊逻辑的电机参数辨识方法可以通过对电机的输入输出数据进行模糊化处理,得到电机的动态参数,具有较高的鲁棒性和可靠性。
3. 基于深度学习的电机参数辨识方法深度学习是一种基于神经网络的机器学习方法,可以处理大规模、高维度的数据。
基于深度学习的电机参数辨识方法可以通过对电机的输入输出数据进行深度学习,得到电机的动态参数,具有较高的精度和鲁棒性。
最小二乘法的原理及其应用一、研究背景在科学研究中,为了揭示某些相关量之间的关系,找出其规律,往往需要做数据拟合,其常用方法一般有传统的插值法、最佳一致逼近多项式、最佳平方逼近、最小二乘拟合、三角函数逼近、帕德(Pade)逼近等,以及现代的神经网络逼近、模糊逼近、支持向量机函数逼近、小波理论等。
其中,最小二乘法是一种最基本、最重要的计算技巧与方法。
它在建模中有着广泛的应用,用这一理论解决讨论问题简明、清晰,特别在大量数据分析的研究中具有十分重要的作用和地位。
随着最小二乘理论不断的完善,其基本理论与应用已经成为一个不容忽视的研究课题。
本文着重讨论最小二乘法在化学生产以及系统识别中的应用。
二、最小二乘法的原理人们对由某一变量t或多个变量t1…..tn 构成的相关变量y感兴趣。
如弹簧的形变与所用的力相关,一个企业的盈利与其营业额,投资收益和原始资本有关。
为了得到这些变量同y之间的关系,便用不相关变量去构建y,使用如下函数模型,q个相关变量或p个附加的相关变量去拟和。
通常人们将一个可能的、对不相关变量t的构成都无困难的函数类型充作函数模型(如抛物线函数或指数函数)。
参数x是为了使所选择的函数模型同观测值y相匹配。
(如在测量弹簧形变时,必须将所用的力与弹簧的膨胀系数联系起来)。
其目标是合适地选择参数,使函数模型最好的拟合观测值。
一般情况下,观测值远多于所选择的参数。
其次的问题是怎样判断不同拟合的质量。
高斯和勒让德的方法是,假设测量误差的平均值为0。
令每一个测量误差对应一个变量并与其它测量误差不相关(随机无关)。
人们假设,在测量误差中绝对不含系统误差,它们应该是纯偶然误差,围绕真值波动。
除此之外,测量误差符合正态分布,这保证了偏差值在最后的结果y上忽略不计。
确定拟合的标准应该被重视,并小心选择,较大误差的测量值应被赋予较小的权。
并建立如下规则:被选择的参数,应该使算出的函数曲线与观测值之差的平方和最小。
用函数表示为:用欧几里得度量表达为:最小化问题的精度,依赖于所选择的函数模型。
锂离子电池等效电路参数辨识最小二乘法全文共四篇示例,供读者参考第一篇示例:锂离子电池是现代电子设备中常用的电池类型之一,其能量密度高、重量轻、使用寿命长等优点使其得到广泛应用。
在电子设备设计和性能优化过程中,我们常常需要对锂离子电池的等效电路参数进行辨识。
等效电路参数是描述锂离子电池内部特性的重要参数,包括电阻、电容、电压源等。
辨识锂离子电池的等效电路参数可以帮助我们更准确地模拟锂电池在不同电荷和放电状态下的特性,从而优化电子设备设计,提高性能和效率。
最小二乘法是一种常用的参数辨识方法,可以通过拟合实测数据来估计锂离子电池的等效电路参数。
最小二乘法是一种通过最小化观测值与模型预测值之间的误差平方和来确定参数估计值的方法。
在锂离子电池的等效电路参数辨识中,我们可以将实测数据与模型之间的误差定义为残差,然后通过最小化残差的平方和来求解最优参数估计值。
锂离子电池的等效电路模型一般包括电阻、电容和电压源三个主要参数。
电阻代表电池内部电阻,影响电流的流动;电容代表电池内的电荷存储能力,影响电压的变化;电压源代表电池的电动势,影响电池的输出电压。
通过最小二乘法,我们可以估计出这三个参数的最优值,实现对锂离子电池等效电路的准确描述。
第二篇示例:锂离子电池是当今最为普遍应用于电动汽车、手机、笔记本电脑等设备中的一种电池类型。
为了更好地管理和控制锂离子电池的性能,我们需要了解其等效电路参数。
而通过最小二乘法来辨识锂离子电池的等效电路参数就是一种常用的方法。
一、锂离子电池的等效电路模型锂离子电池的等效电路模型通常包括电池的内阻、电池的电压和电池的容量。
一般来说,我们可以将锂离子电池抽象成一个电压源和一个内阻的串联电路。
其等效电路模型如下图所示:\[V(t) = E(t) - R_i I(t) - R_v \frac{\partial Q(t)}{\partial t}\]\(V(t)\)是电池的电压,\(E(t)\)是电池的开路电压,\(R_i\)是电池的内阻,\(R_v\)是电池的电压响应,\(Q(t)\)是电池的电量,\(I(t)\)是电池的电流。
---------------------------------------------------------------最新资料推荐------------------------------------------------------系统辨识—最小二乘法最小二乘法参数辨识 1 引言系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
现代控制理论中的一个分支。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类={M}(即给定一类已知结构的模型),一类输入信号 u 和等价准则 J=L(y,yM)(一般情况下,J 是误差函数,是过程输出 y 和模型输出 yM 的一个泛函);然后选择使误差函数J 达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。
2 系统辨识的目的在提出和解决一个辨识问题时,明确最终使1 / 17用模型的目的是至关重要的。
它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。
通过辨识建立数学模型通常有四个目的。
①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。
这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。
②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。
用于系统分析的仿真模型要求能真实反映系统的特性。

Harbin Institute of Technology– HIT系统辨识与自适应控制黄显林、班晓军 控制理论与制导技术研究中心 哈尔滨工业大学 banxiaojun@2010-3-15控制理论与制导技术研究中心第1页Harbin Institute of Technology– HIT第四讲 最小二乘参数辨识标准算法内容提要: 1. 最小二乘数学方法引例; 2. 最小二乘辨识方法的基本计算公式; 3. 算法演示与仿真分析; 4. 加权最小二乘法介绍。
2010-3-15控制理论与制导技术研究中心第2页Harbin Institute of Technology– HIT最小二乘方法的典故:1801年左右,德国数学家Gauss,在“星体轨道估计中”就发明了最小二 乘方法。
Gauss, K. F. (1809), Theoria Motus Corporum Celestium, English Translation: Theory of the Motion of Heavenly bodies. Dover(1963), New York.当时的天文界正在为火星和木星间庞大的间隙烦恼不已,认为火星和 木星间应该还有行星未被发现。
在1801年,意大利的天文学家 Piazzi, 发现在火星和木星间有一颗新星。
它被命名为「谷神星」(Cere)。
现在 我们知道它是火星和木星的小行星带中的一个,但当时天文学界争论 不休,有人说这是行星,有人说这是彗星。
必须继续观察才能判决, 但是 Piazzi只能观察到它 9 度的轨道,再来,它便隐身到太阳後面去 了。
因此无法知道它的轨道,也无法判定它是行星或彗星。
2010-3-15控制理论与制导技术研究中心第3页Harbin Institute of Technology– HIT高斯这时对这个问是产生兴趣,他决定解决这个捉摸不到的星体轨 迹的问题。
高斯自己独创了只要三次观察,就可以来计算星球轨道 的方法。
最小二乘法参数辨识1 引言系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
现代控制理论中的一个分支。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。
2 系统辨识的目的在提出和解决一个辨识问题时,明确最终使用模型的目的是至关重要的。
它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。
通过辨识建立数学模型通常有四个目的。
①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。
这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。
②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。
用于系统分析的仿真模型要求能真实反映系统的特性。
用于系统设计的仿真,则强调设计参数能正确地符合它本身的物理意义。
③预测这是辨识的一个重要应用方面,其目的是用迄今为止系统的可测量的输入和输出去预测系统输出的未来的演变。
例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。
预测模型辨识的等价准则主要是使预测误差平方和最小。
控制理论与控制工程学位课程《系统辨识》考试报告递推阻尼最小二乘法公式详细推导专业:控制理论与控制工程班级:2011双控(研)学生姓名:江南学号:20110201016任课教师:蔡启仲老师2012年06月29 日摘要在参数辨识中,递推最小二乘法是用得最多的一种算法。
但是,最小二乘法存在一些缺点,如随着协方差矩阵的减小,易产生参数爆发现象;参数向量和协方差矩阵的处置选择不当会使得辨识过程在参数收敛之前结束;在存在随机噪声的情况下,参数易产生漂移,出现不稳定等。
为了防止参数爆发现象,Levenberg 提出在参数优化算法中增加一个阻尼项,以增加算法的稳定性。
本文在一般的最小二乘法中增加了阻尼因子,构成了阻尼最小二乘法。
又根据实时控制的要求,详细推到了递推阻尼最小二乘公式,实现在线辨识。
关键字:系统辨识,最小二乘法,递推算法正文1.题目的基本要求已知单入单出系统的差分方程以及噪声,在应用最小二乘法进行辨识的时候,在性能指标中加入阻尼因子,详细推导阻尼最小二乘法的递推公式。
2.输入辨识信号和系统噪声的产生方法和理论依据 2.1系统辩识信号输入选择准则(1)输入信号的功率或副度不宜过大,以免使系统工作在非线性区,但也不应过小,以致信噪比太小,直接影响辩识精度;(2)输入信号对系统的“净扰动”要小,即应使正负向扰动机会几乎均等; (3)工程上要便于实现,成本低。
2.2白噪声及其产生方法 (1) 白噪声过程(2)白噪声是一种均值为0、谱密度为非0常数的平稳随机过程。
(3)白噪声过程定义:如果随机过程()t ω的均值为0,自相关函数为()()2R t t ωσδ= (2.2.1)式中()t δ 为狄拉克(Dirac) 分布函数,即(){(),00,01t t t dt δδ∞∞=≠∞==⎰-且t (2.2.2)则称该随机过程为白燥声过程。
2.3白噪声序列 (1) 定义 如果随机序列{()}w t 均值为0,并且是两两不相关的,对应的自相关函数为()2,0,1,2w l R l l σδ==±± 式中{1,00,0l l l δ=≠=则称这种随机序列{()}w t 为白噪声序列。