第9章 人工神经网络问题
- 格式:ppt
- 大小:472.50 KB
- 文档页数:47



1、什么是BP 网络的泛化能力?如何保证BP 网络具有较好的泛化能力?(5分)解:(1)BP网络训练后将所提取的样本对中的非线性映射关系存储在权值矩阵中,在其后的工作阶段,当向网络输入训练时未曾见过的非样本数据时,网络也能完成由输入空间向输出空间的正确映射。
这种能力称为多层感知器的泛化能力,它是衡量多层感知器性能优劣的一个重要方面。
(2)网络的性能好坏主要看其是否具有很好的泛化能力,而对泛化能力的测试不能用训练集的数据进行,要用训练集以外的测试数据来进行检验。
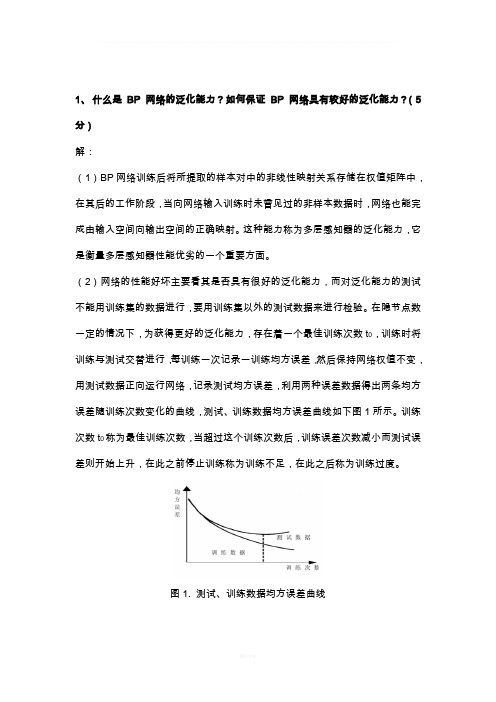
在隐节点数一定的情况下,为获得更好的泛化能力,存在着一个最佳训练次数t0,训练时将训练与测试交替进行,每训练一次记录一训练均方误差,然后保持网络权值不变,用测试数据正向运行网络,记录测试均方误差,利用两种误差数据得出两条均方误差随训练次数变化的曲线,测试、训练数据均方误差曲线如下图1所示。
训练次数t0称为最佳训练次数,当超过这个训练次数后,训练误差次数减小而测试误差则开始上升,在此之前停止训练称为训练不足,在此之后称为训练过度。
图1. 测试、训练数据均方误差曲线2、什么是LVQ 网络?它与SOM 网络有什么区别和联系?(10 分)解:(1)学习向量量化(learning vector quantization,LVQ)网络是在竞争网络结构的基础上提出的,LVQ将竞争学习思想和监督学习算法相结合,减少计算量和储存量,其特点是网络的输出层采用监督学习算法而隐层采用竞争学习策略,结构是由输入层、竞争层、输出层组成。
(2)在LVQ网络学习过程中通过教师信号对输入样本的分配类别进行规定,从而克服了自组织网络采用无监督学习算法带来的缺乏分类信息的弱点。
自组织映射可以起到聚类的作用,但还不能直接分类和识别,因此这只是自适应解决模式分类问题中的第一步,第二步是学习向量量化,采用有监督方法,在训练中加入教师信号作为分类信息对权值进行细调,并对输出神经元预先指定其类别。
人工神经网络单选练习题一、基本概念1. 下列关于人工神经网络的描述,正确的是:A. 人工神经网络是一种静态的计算模型B. 人工神经网络可以模拟人脑的神经元连接方式C. 人工神经网络只能处理线性问题D. 人工神经网络的学习过程是监督式的2. 下列哪种算法不属于人工神经网络?A. 感知机算法B. 支持向量机算法C. BP算法D. Hopfield网络3. 人工神经网络的基本组成单元是:A. 神经元B. 节点C. 权重D. 阈值二、前向传播与反向传播4. 在前向传播过程中,下列哪个参数是固定的?A. 输入值B. 权重C. 阈值D. 输出值5. 反向传播算法的主要目的是:A. 更新输入值B. 更新权重和阈值C. 计算输出值D. 初始化网络参数6. 下列关于BP算法的描述,错误的是:A. BP算法是一种监督学习算法B. BP算法可以用于多层前馈神经网络C. BP算法的目标是最小化输出误差D. BP算法只能用于解决分类问题三、激活函数7. 下列哪种激活函数是非线性的?A. 步进函数B. Sigmoid函数C. 线性函数D. 常数函数8. ReLU激活函数的优点不包括:A. 计算简单B. 避免梯度消失C. 提高训练速度D. 减少过拟合9. 下列哪种激活函数会出现梯度饱和现象?A. Sigmoid函数B. ReLU函数C. Tanh函数D. Leaky ReLU函数四、网络结构与优化10. 关于深层神经网络,下列描述正确的是:A. 深层神经网络一定比浅层神经网络效果好B. 深层神经网络更容易过拟合C. 深层神经网络可以减少参数数量D. 深层神经网络训练速度更快11. 下列哪种方法可以降低神经网络的过拟合?A. 增加训练数据B. 减少网络层数C. 增加网络参数D. 使用固定的学习率12. 关于卷积神经网络(CNN),下列描述错误的是:A. CNN具有局部感知能力B. CNN具有参数共享特点C. CNN可以用于图像识别D. CNN无法处理序列数据五、应用场景13. 下列哪种问题不适合使用人工神经网络解决?A. 图像识别B. 自然语言处理C. 股票预测D. 线性规划14. 下列哪个领域不属于人工神经网络的应用范畴?A. 医学诊断B. 金融预测C. 智能家居D. 数值计算15. 关于循环神经网络(RNN),下列描述正确的是:A. RNN无法处理长距离依赖问题B. RNN具有短期记忆能力C. RNN训练过程中容易出现梯度消失D. RNN只能处理序列长度相同的数据六、训练技巧与正则化16. 下列哪种方法可以用来防止神经网络训练过程中的过拟合?A. 提前停止B. 增加更多神经元C. 减少训练数据D. 使用更大的学习率17. 关于Dropout正则化,下列描述错误的是:A. Dropout可以减少神经网络中的参数数量B. Dropout在训练过程中随机丢弃一些神经元C. Dropout可以提高模型的泛化能力D. Dropout在测试阶段不使用18. L1正则化和L2正则化的主要区别是:A. L1正则化倾向于产生稀疏解,L2正则化倾向于产生平滑解B. L1正则化比L2正则化更容易计算C. L2正则化可以防止过拟合,L1正则化不能D. L1正则化适用于大规模数据集,L2正则化适用于小规模数据集七、优化算法19. 关于梯度下降法,下列描述正确的是:A. 梯度下降法一定会找到全局最小值B. 梯度下降法在鞍点处无法继续优化C. 梯度下降法包括批量梯度下降、随机梯度下降和小批量梯度下降D. 梯度下降法的学习率在整个训练过程中保持不变20. 下列哪种优化算法可以自动调整学习率?A. 随机梯度下降(SGD)B. Adam优化算法C. Momentum优化算法D. 牛顿法21. 关于Adam优化算法,下列描述错误的是:A. Adam结合了Momentum和RMSprop算法的优点B. Adam算法可以自动调整学习率C. Adam算法对每个参数都使用相同的学习率D. Adam算法在训练初期可能会不稳定八、损失函数22. 在分类问题中,下列哪种损失函数适用于二分类问题?A. 均方误差(MSE)B. 交叉熵损失函数C. Hinge损失函数D. 对数损失函数23. 关于均方误差(MSE)损失函数,下列描述错误的是:A. MSE适用于回归问题B. MSE对异常值敏感C. MSE的输出范围是[0, +∞)D. MSE损失函数的梯度在接近最小值时趋近于024. 下列哪种损失函数适用于多分类问题?A. 交叉熵损失函数B. Hinge损失函数C. 对数损失函数D. 均方误差(MSE)九、模型评估与超参数调优25. 下列哪种方法可以用来评估神经网络的性能?A. 训练误差B. 测试误差C. 学习率D. 隐层神经元数量26. 关于超参数,下列描述正确的是:A. 超参数是在模型训练过程中自动学习的B. 超参数的值通常由经验丰富的专家设定C. 超参数的调整对模型性能没有影响D. 超参数包括学习率、批量大小和损失函数27. 关于交叉验证,下列描述错误的是:A. 交叉验证可以减少过拟合的风险B. 交叉验证可以提高模型的泛化能力C. 交叉验证会降低模型的训练速度D. 交叉验证适用于小规模数据集十、发展趋势与挑战28. 下列哪种技术是近年来人工神经网络的一个重要发展方向?A. 深度学习B. 线性回归C. 决策树D. K最近邻29. 关于深度学习,下列描述错误的是:A. 深度学习需要大量标注数据B. 深度学习模型通常包含多层神经网络C. 深度学习可以处理复杂的非线性问题D. 深度学习不适用于小规模数据集30. 下列哪种现象是训练深度神经网络时可能遇到的挑战?A. 梯度消失B. 参数过多C. 数据不平衡D. 所有上述选项都是挑战答案一、基本概念1. B2. B二、前向传播与反向传播4. B5. B6. D三、激活函数7. B8. D9. A四、网络结构与优化10. B11. A12. D五、应用场景13. D14. D15. C六、训练技巧与正则化16. A17. A18. A七、优化算法19. C20. B八、损失函数22. B23. D24. A九、模型评估与超参数调优25. B26. B27. D十、发展趋势与挑战28. A29. D30. D。

习题2.1什么是感知机?感知机的基本结构是什么样的?解答:感知机是Frank Rosenblatt在1957年就职于Cornell航空实验室时发明的一种人工神经网络。
它可以被视为一种最简单形式的前馈人工神经网络,是一种二元线性分类器。
感知机结构:2.2单层感知机与多层感知机之间的差异是什么?请举例说明。
解答:单层感知机与多层感知机的区别:1. 单层感知机只有输入层和输出层,多层感知机在输入与输出层之间还有若干隐藏层;2. 单层感知机只能解决线性可分问题,多层感知机还可以解决非线性可分问题。
2.3证明定理:样本集线性可分的充分必要条件是正实例点集所构成的凸壳与负实例点集构成的凸壳互不相交.解答:首先给出凸壳与线性可分的定义凸壳定义1:设集合S⊂R n,是由R n中的k个点所组成的集合,即S={x1,x2,⋯,x k}。
定义S的凸壳为conv(S)为:conv(S)={x=∑λi x iki=1|∑λi=1,λi≥0,i=1,2,⋯,k ki=1}线性可分定义2:给定一个数据集T={(x1,y1),(x2,y2),⋯,(x n,y n)}其中x i∈X=R n , y i∈Y={+1,−1} , i=1,2,⋯,n ,如果存在在某个超平面S:w∙x+b=0能够将数据集的正实例点和负实例点完全正确地划分到超平面的两侧,即对所有的正例点即y i=+1的实例i,有w∙x+b>0,对所有负实例点即y i=−1的实例i,有w∙x+b<0,则称数据集T为线性可分数据集;否则,称数据集T线性不可分。
必要性:线性可分→凸壳不相交设数据集T中的正例点集为S+,S+的凸壳为conv(S+),负实例点集为S−,S−的凸壳为conv(S−),若T是线性可分的,则存在一个超平面:w ∙x +b =0能够将S +和S −完全分离。
假设对于所有的正例点x i ,有:w ∙x i +b =εi易知εi >0,i =1,2,⋯,|S +|。
《神经网络原理》一、填空题1、从系统的观点讲,人工神经元网络是由大量神经元通过极其丰富和完善的连接而构成的自适应、非线性、动力学系统。
2、神经网络的基本特性有拓扑性、学习性和稳定收敛性。
3、神经网络按结构可分为前馈网络和反馈网络,按性能可分为离散型和连续型,按学习方式可分为有导师和无导师。
4、神经网络研究的发展大致经过了四个阶段。
5、网络稳定性指从t=0时刻初态开始,到t时刻后v(t+△t)=v(t),(t>0),称网络稳定。
6、联想的形式有两种,它们分是自联想和异联想。
7、存储容量指网络稳定点的个数,提高存储容量的途径一是改进网络的拓扑结构,二是改进学习方法。
8、非稳定吸引子有两种状态,一是有限环状态,二是混沌状态。
9、神经元分兴奋性神经元和抑制性神经元。
10、汉明距离指两个向量中对应元素不同的个数。
二、简答题1、人工神经元网络的特点?答:(1)、信息分布存储和容错性。
(2)、大规模并行协同处理。
(3)、自学习、自组织和自适应。
(4)、人工神经元网络是大量的神经元的集体行为,表现为复杂的非线性动力学特性。
(5)人式神经元网络具有不适合高精度计算、学习算法和网络设计没有统一标准等局限性。
2、单个神经元的动作特征有哪些?答:单个神经元的动作特征有:(1)、空间相加性;(2)、时间相加性;(3)、阈值作用;(4)、不应期;(5)、可塑性;(6)疲劳。
3、怎样描述动力学系统?答:对于离散时间系统,用一组一阶差分方程来描述:X(t+1)=F[X(t)];对于连续时间系统,用一阶微分方程来描述:dU(t)/dt=F[U(t)]。
4、F(x)与x 的关系如下图,试述它们分别有几个平衡状态,是否为稳定的平衡状态?答:在图(1)中,有两个平衡状态a 、b ,其中,在a 点曲线斜率|F ’(X)|>1,为非稳定平稳状态;在b 点曲线斜率|F ’(X)|<1,为稳定平稳状态。
在图(2)中,有一个平稳状态a ,且在该点曲线斜率|F ’(X)|>1,为非稳定平稳状态。