可编程组合型教学机器人.
- 格式:doc
- 大小:46.50 KB
- 文档页数:2

幼儿园科技乐园:机器人编程教学案例共享1.引言在当今数字化、信息化的时代,科技已经深入到人们生活的方方面面。
作为孩子们的第一步教育,幼儿园的科技教育也变得越来越重要。
而在科技教育中,机器人编程已经成为一种新的趋势,可以帮助孩子们培养逻辑思维、创造力和解决问题的能力。
本文将结合幼儿园的具体案例,共享机器人编程教学的经验和效果,帮助家长和教育者更好地理解幼儿园科技教育的重要性和方法。
2.案例共享2.1 案例一:小猫机器人编程在某幼儿园,教师们引入了小猫机器人编程教学。
小猫机器人是一种专门为幼儿设计的可编程机器人玩具,它可以通过简单的指令来移动、发出声音等,非常适合幼儿园阶段的孩子们。
在这个案例中,教师们首先通过图形化的编程软件进行示范,让孩子们了解编程的基本概念,然后让孩子们亲自动手编写指令,让小猫机器人按照他们的思路行动。
通过这样的活动,孩子们不仅学会了基本的编程概念,还培养了动手能力和团队合作精神。
2.2 案例二:乐高机器人编程另一家幼儿园引入了乐高机器人编程教学。
乐高机器人是一种可编程的乐高积木,通过组装和编程,可以让孩子们创造出不同功能的机器人模型。
在这个案例中,教师们组织孩子们进行团队合作,共同设计和编程他们的乐高机器人。
在这个过程中,孩子们学会了解决问题的方法和技巧,并在激励的环境下培养了解决问题的能力。
3.总结与回顾通过以上两个案例的共享,我们可以看到幼儿园科技乐园在机器人编程教学方面的独特之处。
幼儿园科技乐园注重激发孩子们的创造力和解决问题的能力,而不仅仅是传授知识。
幼儿园科技乐园注重了团队合作和实际操作,让孩子们在实践中学习并体验乐趣。
幼儿园科技乐园注重个性化教育,让每个孩子都能够按照自己的兴趣和水平进行学习和创造。
4.个人观点和理解在我看来,幼儿园科技乐园的机器人编程教学方法非常值得肯定。
它不仅可以培养孩子们的动手能力和逻辑思维能力,还可以帮助他们建立自信心和团队合作精神。
未来,我希望能够看到更多的幼儿园向机器人编程教学借鉴,为孩子们提供更丰富多样的科技教育体验。

教育机器人的种类与应用场景随着科技的不断发展,教育机器人逐渐成为教育领域的新宠。
教育机器人是指能够进行教育活动的机器人,它能够与学生进行互动、辅助教师进行教学,以提供更加丰富、趣味、有效的学习体验。
本文将介绍教育机器人的种类及其在教育中的应用场景。
一、种类概述教育机器人的种类繁多,可以根据不同的功能和形态进行分类。
以下是几种常见的教育机器人种类:1. 编程教育机器人:编程教育机器人主要用于教授儿童编程思维,帮助他们学习编程语言和解决问题的方法。
这类机器人常采用可编程模块,孩子们可以通过编写程序来控制机器人的动作,实现一系列自定义的功能。
2. 语言教育机器人:语言教育机器人主要用于教授学生语言技能,如英语口语、汉语拼音等。
它们通常配备有语音识别和发音功能,能够模拟对话、提供实时纠错和发音指导,帮助学生提升口语表达能力。
3. 科学教育机器人:科学教育机器人可以模拟实验操作和科学现象,帮助学生理解科学知识。
这些机器人常用于物理、化学等实验教学,通过实际操作和观察,激发学生对科学的兴趣。
4. 情感教育机器人:情感教育机器人主要用于培养学生的情感智能,如情绪管理、人际交往等。
它们能够通过识别面部表情、语音语调等方式,与学生进行情感互动和情绪管理训练,有效提升学生的情感素养。
5. 儿童陪伴机器人:儿童陪伴机器人是一种以陪伴和教育为目的的智能机器人,能够与孩子进行互动、游戏和教育活动。
这类机器人通常具备人性化的外表和声音,能够给予孩子情感上的支持和学习上的指导。
二、应用场景教育机器人在教育领域有着广泛的应用场景,下面列举几个常见的场景:1. 校内教学:教育机器人可以作为学校教学的辅助工具,帮助教师提供更加个性化、互动性强的教学方式。
例如,在语言课堂上,教育机器人可以与学生对话,纠正发音错误;在科学实验课上,教育机器人可以进行实验演示,让学生更好地理解科学原理。
2. 学前教育:对于学龄前儿童,教育机器人可以成为良好的学习伙伴,帮助他们学习语言、数字等基础知识。


机器人可编程动作说明书一、简介本说明书为机器人的可编程动作指南,旨在帮助用户了解机器人的动作程序以及如何进行编程。
通过按照以下步骤执行编程,用户可以使机器人实现各种不同的动作。
二、动作编程步骤以下是机器人动作编程的基本步骤:1. 创建动作程序首先,打开机器人控制软件,并选择“新建动作程序”选项。
在新建的动作程序中,用户可以为机器人定义一个独特的名称,并开始编写机器人的动作。
2. 选择动作在动作程序中,用户可以选择机器人现有的基本动作,如行走、伸展、旋转等。
每个动作都会有一个对应的编号和名称,用户可以根据需求选择适当的动作。
3. 参数调整对于每个选择的动作,用户可以根据需要进行参数的调整。
例如,可以调整机器人的速度、幅度、角度等参数,以适应不同的场景和要求。
4. 组合动作除了使用单个动作外,用户还可以将多个动作组合在一起,形成一个完整的动作序列。
通过添加、删除和调整顺序,用户可以定制机器人的动作序列,并实现更加复杂的动作表演。
5. 添加条件控制对于特殊需要,用户还可以通过添加条件控制来精确控制机器人的动作。
条件控制可以根据外部传感器的信号或用户的指令,使机器人按照特定的条件执行相应的动作。
6. 调试和测试在完成动作程序的编写之后,用户可以通过调试和测试来验证程序的有效性。
用户可以选择在虚拟环境中进行测试,或将动作程序上传到机器人设备上进行实际执行。
7. 保存和使用一旦动作程序经过测试没有问题,用户可以将其保存,并在需要时随时加载和使用。
用户还可以将动作程序导出为文件,以便与其他用户共享和交流。
三、常见问题解答以下是一些常见问题的解答,可以帮助用户更好地理解和应用机器人的可编程动作功能:1. 动作程序是否可以重复使用?是的,一旦用户创建并保存了动作程序,可以随时重新加载和使用。
用户还可以根据需要对动作程序进行修改和优化。
2. 是否可以同时执行多个动作程序?是的,机器人可以同时执行多个动作程序,并按照设定的顺序逐个进行。

VEX IQ 产品介绍VEX IQ 产品介绍1、引言- 简介:VEX IQ 是一款专为学生设计的教育型产品。
它通过激发学生的创造力和解决问题的能力,帮助他们在科学、技术、工程和数学领域取得成功。
- 目的:本文档旨在介绍VEX IQ 的功能、特点和用途,以便用户更好地了解和使用该产品。
2、产品概述2.1 产品名称:VEX IQ2.2 产品组成:VEX IQ 套件包括构建零件、电子模块、遥控器和配件等。
2.3 主要功能:VEX IQ 可以执行各种任务,比如拾取和堆叠对象、移动并操控物体、遵循预定路径等。
2.4 适用年龄:VEX IQ 适合学龄儿童,包括小学和初中阶段的学生。
2.5 教育价值:VEX IQ 可以培养学生的合作精神、创新思维和问题解决能力。
3、构件和电子模块3.1 构件:VEX IQ 套件包含各种构建零件,如铝合金横梁、联轴器、螺栓和螺母等。
3.2 电子模块:VEX IQ 套件还包括各种电子模块,如电机、传感器和控制器等。
这些模块可以与构建零件结合使用,实现的运动和功能控制。
4、遥控器和配件4.1 遥控器:VEX IQ 套件附带一个遥控器,可以用来远程控制的移动和执行任务。
4.2 配件:VEX IQ 套件还包含各种配件,如轮子、皮带、齿轮等,用于增加的功能和多样性。
5、应用领域5.1 教育机构:VEX IQ 是许多学校和教育机构推广STEM教育的重要工具,可以用于教授科学、技术、工程和数学等学科内容。
5.2 竞赛活动:VEX IQ 广泛应用于各种竞赛活动,如足球、拼图比赛等。
参与这些活动可以激发学生的竞争意识和创造力。
6、附件- 本文档附带以下附件:- VEX IQ 套件的零件清单- VEX IQ 的组建指南- VEX IQ 的编程教程7、法律名词及注释(本部分根据具体情况自行补充)8、结尾附件:1、VEX IQ 套件的零件清单2、VEX IQ 的组建指南3、VEX IQ 的编程教程法律名词及注释(根据具体情况自行添加):1、版权:指对作品(包括文学、艺术、音乐、影像作品等)的制作和发表所享有的法律保护。
教学型可编程数字控制机械手设计作者:崔小松肖建章来源:《职业·下旬》2009年第08期目前,机器人已经广泛应用于各个领域,其中工业机器人在现代化工业国家正在得到越来越广泛的应用,各种类型的工业机器人不断进入市场,这要求有更多掌握机器人技术的人员,能够正确操作和使用机器人。
为了适应这一社会需求,开发模拟工业机器人系统的实验教学系统就成为紧迫需要。
而作为机器人技术、计算机技术及机电一体化技术教育的教学工具,对人才培养和高新技术的推广应用有着重要的意义。
目前市场上所提供的教学型机器人或机械手一般价格在十几万元左右,且不具开放性,即用户只能高端应用而无法根据需要进行多层次开发。
因此,研制一种低成本开放性的机械手应用于机电一体化教学实验是非常必要的。
本文以工业自动化应用中最广泛的装配机械手为教学实验系统的开发目标,以四个自由度机械手为例,研究在PLC 控制下实现手动及自动等多种工作方式,为学习机电一体化技术提供一种理想的教学实验装置。
一、系统结构设计教学型机械手实验系统作为一种工业机器人系统的模拟系统,首先要在总体结构和控制功能上最大限度地反映实用工业机器人样机的主要特征,如机电一体化的系统构成方式等,同时能做到结构简单,操作方便。
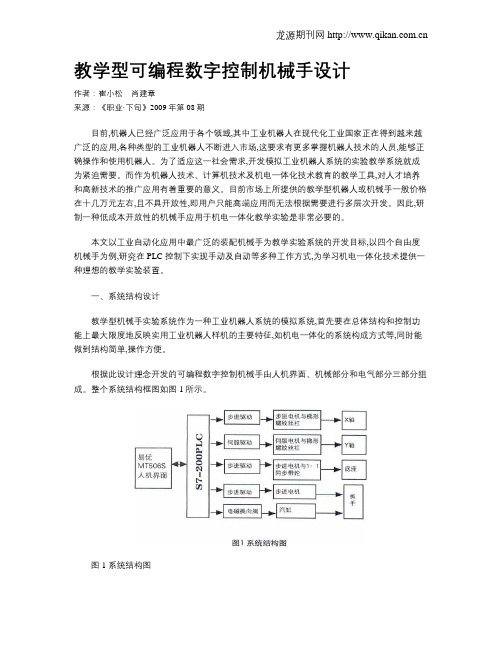
根据此设计理念开发的可编程数字控制机械手由人机界面、机械部分和电气部分三部分组成。
整个系统结构框图如图1所示。
图1 系统结构图1.机械部分机械部分有两个直线运动轴,即X、Y轴,两个旋转方向,即底座与抓手。
X直线轴采用步进电机与梯形螺纹丝杆直接连接;Y直线轴采用伺服电机与梯形螺纹丝杆直接连接;抓手的旋转用步进电机与汽缸直接连接;底座的旋转用步进电机通过1:1同步带轮传动。
另外加上回零、限位及其他附件组成。
抓手直接装到汽缸上,选用不同类型的抓手可以实现移动不同产品的功能。
机械部分如图2所示。
2.电气部分电气控制部分采用西门子S7-200 PLC控制三个步进驱动器和一个伺服驱动器,再由驱动器分别控制三台步进电机和一台伺服电机实现机械手直线移动和旋转动作。
可编程的“旋风机器人”提供手掌大的编码设备2015年7月13日星期一随着世界范围内对STEM(科学、技术、工程、数学)课程越来越看重,开发商们正不断地推出新的方法帮助很小的孩子学习编码和编程的基本原理。
幸好有像“旋风”这样的新玩具,一种可以编程的机器人,孩子们可以通过一种快乐和互动的方式学习编程的基础知识。
Engadget的埃德加报道说:“旋风”已经通过DFRobot的Kickstarter活动跟大家见面了。
自2008年起,公司已经在销售开源硬件,现在他们正筹集50000美元资金用于新的手掌大小的机器人项目。
“有了旋风,DFRobot想将快乐带回给下一代,提升孩子们的STEM教育,甚至从早期就开始”DFRobot的CEO里奇说。
“大多数情况下,玩具技术这几十年来确实没有什么变化。
我们选择突破的方式是采用孩子们可能热衷的智能机器人,同时也学习编程和机器人技术。
”“旋风”能够与软件兼容,可用于iOS和安卓系统,用户可以通过蓝牙技术玩“旋风”。
“旋风”准备了各类预先装载的游戏。
游戏的设计既有娱乐性又可以凭直觉来操作,有撞击打斗,它是一种玩家尝试将彼此推出竞技场的游戏,也有机器人足球,适应各种场地,2到22个玩家都可以展开一场比赛。
尽管“旋风”的编程游戏是孩子们自己或与他人一种快乐的玩乐方式,但是机器人的唯一特性便是它可以通过一款叫做WhenDo的软件便捷地进行编程。
技术时代的罗宾·伯克斯写道:用户可以使用拖拽图形编辑为“旋风”创建他们自己的软件。
这使得孩子们能够不用写任何代码却可以学习和了解编程的基本原理。
软件也配备了基本的预设课程,让用户学习如何有效地对“旋风”编程。
“我们正在将家庭转换成部分机器人技术实验室和部分游乐场”里奇说。
“我们完全相信从玩乐中学习的道理。
有了我们的机器人,可以提供一种浸润式编程体验,孩子们可以在体验真实的乐趣的同时学习编码。
我们的任务是拉近玩具和教育的距离——尤其是STEM教育——因为教育驱动的技能比以往更为重要。
第36卷第2期2020年6月沧州师范学院学报JournalofCangzhouNormalUniversityVol.36,No.2Jun.2020可编程线性霍尔全自动编程控制机器人的设计与制作徐中林,董庆运(沧州师范学院现代教育技术中心,河北沧州061001)摘 要:霍尔效应传感器在汽车工业领域有着广泛的应用.当前普遍使用的传感器一般是采用人工方式对霍尔元件进行编程和数据写入,操作过程重复、繁琐,在大批量生产中容易产生疲劳,导致操作失误.为此,设计并制作了一种可编程线性霍尔全自动编程控制机器人,使用“控制机器人”取代人手来移动鼠标、操纵电脑程序,同时输出控制信号操纵马达、气缸等设备.经实验验证,该设计能够取代一些操作繁琐且重复的工作,成本低,操作简单,性能稳定,工作可靠.关键词:可编程线性霍尔器件;全自动机器人;角度传感器;汽车电子节气门;Arduino中图分类号:TP212.6 文献标识码:A 文章编号:2095 2910(2020)02 0052 04可编程线性霍尔元件可用来取代传统的电阻膜片,广泛应用于各种测量仪器中,在线性位置测量、角度测量、磁场与电流及位移测量等方面独具优势[1 3],可满足汽车和工业领域的低成本应用方案.使用此类器件一般要求具有指定公司提供的专用程序和专用写入设备,因此具有较强的垄断性.目前提供的写入设备和程序仅可通过人工进行操作,操作过程重复、繁琐,如果需要批量生产,只能购买昂贵的专用烧写编程器和专用程序,对于中小企业来说无疑是较大的负担[4].笔者进行了可编程线性霍尔全自动编程控制机器人的设计与制作研究,意在使用电脑机器人代替工人繁琐的操作,为企业节省经济成本和时间成本,提升企业效益.1 系统的工作原理系统的工作原理与工作思路可通过以下事例说明:某汽车配件厂生产电子节气门体,使用的角度传感器芯片为Melexis公司的可编程霍尔集成电路MLX90360.生产过程中,需要将磁场旋转出两个以上的角度进行数据标定,以便在指定的角度输出相应的电压值.专用烧写程序和烧写仪器则必须使用Melexis公司提供的基于Windows下的操作程序Melexisprogrammabletoolbox,以及对应的芯片烧录器PTC 04[5 6].2 系统运行过程中的困境目前,生产过程中的相关操作都是由工人手动完成,每一件产品都要进行以下步骤:依次使用鼠标点击程序中DieA和DieB的“Newdevice”、“Setsettings”、“SetGain”、“DefineDP”、“Characterize”,共计10个确认动作,通过这些动作建立新的芯片信息.之后,在第一个指定位置点击DieA“setpoint0”、DieB“setpoint0”,写入该点的磁场信息;将磁钢旋转到第二个指定位置后再次点击鼠标的DieA“setpoint1”、DieB“setpoint1”,写入第二个点位的磁场信息;如果有第三个位置信息,还需点击DieA“setpoint2”、DieB“setpoint2”;按照类似的方法,依次点击之后所有的按钮.每一件产品需要点击鼠标达22次以上.生产过程中,双眼必须紧盯屏幕,同时还要操作旋转的机器以调整磁场的角度.由于动作繁琐,工人极易疲惫,导致废品率较高、生产效率低下.3 系统运行困境的破解方案和思路设计可编程线性霍尔全自动编程控制机器人,意在使用电脑机器人代替工人进行繁琐的操作.工作时,收稿日期:2019 12 19作者简介:徐中林(1968 ),男,河北吴桥人,沧州师范学院现代教育技术中心实验师,研究方向:自动化、机电一体教育技术;董庆运(1990 ),男,河北沧县人,沧州师范学院现代教育技术中心讲师,研究方向:云计算、通信运维.只需按下一个按钮,控制机器人将自行完成所有鼠标的移动和左键确认,并将产品自动旋转到指定的角度,点击对应的按钮DieA~B Setpoint0~2写入预制的数据,然后再次将磁场旋转到第二个指定角度写入数据,并且在完成数据写入后进行验证和锁定,操作简单,正确率为100%.图1 可编程线性霍尔全自动编程控制机器人工作思路图本产品使用简单易学的Arduino[78]作为编程执行机器人,具体的工作思路如图1所示.利用两相八拍步进电机的驱动程序直接产生相位差的信号分别给出X,Y两路脉冲,转换成光电信号;光电信号则分离出鼠标所需要的AB相位,控制鼠标箭头在屏幕上精确地上下左右运动,并在指定的位置给出一个高电平作为鼠标确认左键信号;同时程序会在指定的位置同步输出马达控制信号或者气缸控制信号,控制转轴的磁场旋转到指定的角度.4 机器人的设计、制作与使用4.1 硬件的需求电脑主机为市场销售的普通家用计算机,电脑主机上运行的编程程序programmabletoolbox、以及程序所需要的烧写器PTC 04由厂家提供,其他部分均自行研制和开发.控制使用的Arduino可以在市场采购,所采用的为ATMEGA32U4开发板ProMicro5V/16MHz兼Arduino,电路转接板为自行设计制作.4.2 程序的编写对于机器人电脑控制中心部分的编程,所用的Arduino编程软件为Arduino1.52,程序设计根据需求自行定义,如下:#include<Steper28BYJ48.h>//调用步进电机驱动Steper28BYJ48x(8,6,8,7,9);//设置鼠标X轴运动方向和步数Steper28BYJ48y(8,2,4,5,3);//设置鼠标Y轴运动方向和步数intK=13;//编程工作信号输出intOP=12;//节气门体门板打开intCL=11;//节气门体门板全部关闭intmouse=10;//把第10脚作为鼠标的左键执行键intST=0;//开始编程信号输入intval;voidsetup(){pinMode(OP,OUTPUT);pinMode(CL,OUTPUT);pinMode(K,OUTPUT);pinMode(mouse,OUTPUT);pinMode(ST,INPUT);digitalWrite(ST,HIGH);//把开始编程引脚置位高电平,低电平有效}……y.step( 53);x.step( 15);digitalWrite(mouse,HIGH);delay(200);digitalWrite(mouse,LOW);//finish R,x.step( 90);digitalWrite(mouse,HIGH);delay(200);digitalWrite(mouse,LOW);//finish l,delay(150);x.step(40);y.step(160);x.step( 80);//返回屏幕的左上角作为起始点digitalWrite(K,LOW);编程完毕,向总控制器传送完毕信号}delay(300);}程序至此,由Arduino控制板所产生的电信号分别是X Y轴的光电信号、鼠标左键确认信号、驱动光电子节气门体的满开度及全关闭电信号、向外围控制系统提供开始输入信号、机器人电脑控制中心所发出的“正在编程”的输出开关信号.4.3 电路设计鼠标驱动使用市场普及鼠标的滚球芯片EMB4502,由单片机Arduino提供的L,X,Y轴的光电信号分别输入到芯片的9,10,11,12,13,然后再输出三路信号作为伺服马达控制信号和自动编程工作状态信号,一路输入信号作为自动编程启动信号.图2 样品实物图按照图纸制作的样品实物如图2所示.所有导线连接完毕后,将鼠标插头插入计算机,重新启动后识别鼠标芯片.启动编程软件Melexisprogramma bletoolbox,设置好参数后将鼠标指针移动到屏幕的左上角,按下开始键,自动编程开始.观察鼠标移动方向和点击位置,如果位置不准确则调整对应的x.step(?)、y.step(?)以及内部的参数,并观察鼠标指针移动的位置是否符合要求.最后,验证编程结果是否符合生产要求.(注:语句括号中的?为数字,代表需要从原点挪动的步数.数字的格式为带正负号的整数,其中x.step(?)代表横向移动的步数,正数为向右移动,负数为向左移动;y.step(?)代表纵向移动的步数,正数为向下移动,负数为向上移动.)4.4 产品实验效果测评在产品的设计与制作时,使用Arduino系列promini改进版ATMEGA328P作为主控制芯片,使用机械鼠标的驱动电路EM84502作为电脑鼠标控制.生产实验的产品为东风小康汽车工业使用的电子节气门体,其芯片型号为MELEXIS 90360ACD,对其进行编程.实验要求连续24小时反复写入和验证,误差为零,实验期间无人工干扰和操作.每个产品的编程时间仅为22秒,速度远超过人工操作,而且可以将其作为全自动生产线上的一个环节.利用当前的研究和设计结果,为河北省沧州市某企业汽车电子节气门体的生产线制作了一个实验样品.在汽车电子节气门体中,需要反馈给中央控制器的角度信号为0.75V~4.75V的模拟电压,同时还要输出一组冗余电压信号作为基准,两路信号在任意角度时输出电压之和等于5V.所采用的角度传感器芯片为Melexis公司的可编程霍尔集成电路MLX90360,它需要将主轴磁场旋转出两个以上的角度进行数据标定,以便在指定的角度输出指定的电压值.在全自动操作中,首先对机器人电脑控制中心部分进行编程,让其产生电脑鼠标的操作信号和相对节点的角度驱动控制信号;所有的信号产生后还需有相应的配套电路来完成实体驱动.通过安装由Melexis公司提供的基于Windows下的操作程序Melexisprogrammabletoolbox以及对应的芯片烧录器PTC 04,来实现对编程计算机进行控制,并且同步输出一个高电压大电流的驱动器,来驱动汽车电子节气门体主轴门板旋转.经验证,产品使用效果良好.5 结束语设计并制作了一种可编程线性霍尔全自动编程控制机器人,用单片机或者Arduino代替人工来控制计算机鼠标和外部控制电路,实现机器人代替人工的产业变更.在实际生产中,可以取代人工进行一些操作繁琐且重复的工作,成本低,操作简单,性能稳定,工作可靠.参考文献:[1] 吕飞.单芯片CMOS三维微型霍尔磁传感器研究[D].南京:南京大学,2017.[2] 李思霖.霍尔效应原理及应用研究[J].电子世界,2018,(2):80 81.[3] 吕德刚,都泽源,李松.永磁无刷电机霍尔位置传感器容错控制[J].电机与控制学报,2019,23(2):44 52.[4] 李芳.高性能霍尔器件的研制与性能优化[D].西安:西安电子科技大学,2016.[5] 袁德胜.基于MLX90360的电子油门位置反馈设计[J].山西电子技术,2018,(3):44 46.[6] 陈科球,谢伟广.一种新型汽车节气门角度传感器设计[J].传感器与微系统,2014,33(6):80 81.[7] [美]班兹.爱上Arduino[M].于欣龙,郭浩 译.北京:人民邮电出版社,2011.[8] 闫洪猛.基于Arduino的移动机器人控制系统设计[J].电子技术与软件工程,2018,(7):106.犜犺犲犇犲狊犻犵狀犪狀犱犕犪狀狌犳犪犮狋狌狉犲狅犳犪犘狉狅犵狉犪犿犿犪犫犾犲犔犻狀犲犪狉犎犪犾犾犃狌狋狅犿犪狋犻犮犘狉狅犵狉犪犿犿犻狀犵犆狅狀狋狉狅犾犚狅犫狅狋XUZhong lin,DONGQing yun(ModernEducationalTechnologyCenter,CangzhouNormalUniversity,Cangzhou,Hebei061001,China)犃犫狊狋狉犪犮狋:Hall effectsensorsarewidelyusedinthefieldofautomobileindustry.Atpresent,thecom monlyusedsensorsaregenerallyprogrammedwithdataputtingintotheHallelementmanually.Theoper ationprocessisrepetitiveandtroublesome,whichispronetofatigueandoperationerrorsinmassproduc tion.AprogrammablelinearHallautomaticprogrammingcontrolrobotwasdesignedandmanufacturedtoaddresstheproblems.This“controllingrobot”replacesthehumanhandtomovethemouseandmanipu latethecomputerprogram,andatthesametimeitsendsoutthecontrolsignaltooperatethemotor,cylin derandotherequipment.Thisdesigncanreplacesometediousandrepetitivework,withtheadvantagesoflowcost,simpleoperation,stableandreliableperformance,andsoon.犓犲狔狑狅狉犱狊:programmablelinearHalldevice;fullyautomaticrobot;anglesensor;automobileelectronicthrottle;Arduino[责任编辑:尤书才 武玉琳]。
在幼儿园中班,机器人编程教学是一种越来越受欢迎的教育方式。
通过机器人编程教学,孩子们可以在玩乐中学习,培养他们的逻辑思维和动手能力。
在这篇文章中,我们将深入探讨幼儿园中班机器人编程教学的案例,让孩子在玩乐中爱上科技。
1. 了解幼儿园中班机器人编程教学的意义幼儿园中班是孩子们认知发展的重要时期,他们对世界充满好奇和探索欲望。
通过机器人编程教学,孩子们可以在玩乐中学习,培养他们的逻辑思维和动手能力。
机器人编程教学可以帮助孩子们提前了解科技知识,让他们在未来更好地适应社会的发展。
2. 实施机器人编程教学的具体案例在某某幼儿园,老师们结合幼儿园中班的实际情况,通过引入机器人编程教学,为孩子们设计了一系列有趣的活动。
他们利用可编程机器人小乌龟,让孩子们通过指令来控制小乌龟的移动,从而锻炼孩子们的逻辑思维和动手能力。
老师们还设计了一些趣味性的游戏,让孩子们在游戏中学习编程知识,增强他们的学习兴趣。
3. 教学成效的评价经过机器人编程教学的实施,孩子们不仅掌握了一些基础的编程知识,同时也培养了他们的团队协作能力和解决问题的能力。
而且,孩子们在玩乐中爱上了科技,对未来的学习和生活充满了憧憬。
4. 个人观点和理解对于幼儿园中班机器人编程教学,我认为这是一种非常有意义和价值的教育方式。
通过机器人编程教学,孩子们不仅可以在玩乐中学习,还能培养他们的逻辑思维和动手能力。
这种教学方式不仅可以提前启蒙孩子们的科技兴趣,还可以为他们未来的学习和生活奠定基础。
总结回顾通过上面的案例分析和个人观点,我们可以看出,幼儿园中班机器人编程教学是一种非常有意义和价值的教育方式。
通过这种教学方式,孩子们不仅可以在玩乐中学习,还能培养他们的逻辑思维和动手能力。
我相信这种教学方式将会在未来越来越受到重视,为孩子们的成长和发展带来更多的可能性。
随着社会的发展和科技的进步,机器人编程教学已经成为一种越来越受欢迎的教育方式。
特别是在幼儿园中班,这种教学方式可以帮助孩子们在玩乐中学习,培养他们的逻辑思维和动手能力。
乐高机器人幼儿园教案一、教学目标1.了解乐高机器人的基础知识和功能。
2.通过乐高机器人编程和搭建完成简单的运动操作。
3.提高幼儿动手动脑的能力和逻辑思维能力。
4.培养幼儿的合作精神和团队协作能力。
5.激发幼儿的科技兴趣和创新意识。
二、教学内容1. 什么是乐高机器人?乐高机器人是一种可编程并可拼接的机器人玩具,它能让孩子们通过自己的动手拼装和编程实现自己的想法。
它的核心部件是控制器和各种电机和传感器,通过编程控制各个部件的动作,实现机器人的各种功能,比如行走、旋转、拍打、显示等。
2. 乐高机器人的组装让孩子们手动拼接乐高机器人,并通过模型说明书上的步骤逐步拼装乐高机器人的控制器、电机、传感器等组件,了解各个组件的功能和使用方式。
3. 乐高机器人的编程在完成乐高机器人组装之后,让孩子们学习如何编程乐高机器人。
通过图形化编程工具和简单的编程块,孩子们可以实现对乐高机器人各部件的编程控制,比如向前走、向后走、转弯等。
4. 操作练习让孩子们通过编程实现控制乐高机器人移动和完成任务,比如:•将机器人朝向目标点并前进。
•控制机器人以一定速度绕圈移动。
•让机器人完成扫地、抓物等任务。
5. 团队合作将孩子们分成小组,让他们互相合作,共同完成任务。
在此过程中,帮助他们学习如何合作、如何交流、如何分工与合作。
三、教学步骤及方法1. 教学前期准备•确定教学内容和教学目标,准备好教案和教材。
•确定教学设备和材料,包括乐高机器人、电源、控制器、编程软件、编程块等。
•对教师进行必要的培训,熟练掌握教学内容和方法。
2. 乐高机器人组装•将孩子们分成小组,每个小组会分配一个乐高机器人。
•依照模型说明书上的步骤,逐步拼装乐高机器人的控制器、电机、传感器等组成部分。
•让孩子们了解每个组件的名称和功能。
3. 乐高机器人编程•引导孩子们打开编程软件,介绍编程块的基本功能和用法。
•通过图形化编程工具,让孩子们学习如何编程乐高机器人。
•针对不同的任务,逐步加深编程难度,让孩子们能够灵活控制机器人。
可编程组合型教学机器人
作者:范文涛吴铭徐升弈徐莉
指导老师:李诚元
机器人技术已经逐渐融入到人们的生产生活中。
机器人学也已经成为各大学的热门学科,但是国内只有少数几家重点院校拥有昂贵的机器人实验室、开发设备、同时机器人技术的深奥、牵涉面广、耗资大也使一些从事信息技术的院校只能从事理论上的研究。
鉴于此,我们研发小组提出应用于教学的可编程组合型机器人,使非机械、自动化的工科学生跳过零件设计环节,只需经过简单的装配,就能把原来只停留在理论何书面上的专业知识应用到真正的实践中去。
整套机器人组件采用美国乐高公司的ALO-II机器人套件,其中RCX采用英国ARM公司的ARM7DMI微处理器,机器人开发的环境采用国家仪器和ARM公司联合开发的FIRE WARRIER,开发语言采用ARM-C和嵌入式汇编混合编程。
从上述公司提供的整套开发环境来看十分易学,容易上手。
我们这次利用套件制作了一个考古机器人(南邮号),主要框架如下:
通信原理综合实验系统
作者:徐建松刘贤正周林
单位:三系01
指导老师:王奇
近年来随着通信技术的发展,原有的通信原理实验箱与教学内容严重脱节,这类实验箱所采用的技术与器件与当今通信专业实验室建设要求相差甚远,无法适应当前教学的要求。
另一方面这类实验箱可开设的实验内容极为有限,难以提高学生的动手能力、分析问题和解决问题的能力。
因此我们在原有通信原理实验平台的基础上又研制出一种适合于高等院校使用的“通信原理综合试验系统”,该实验系统容纳了当今最新通信技术(数字信号DSP技术、FPGA技术等),相信这一实验系统能使现有的通信实验更上一个新台阶。
该作品具有以下特点:
科学性:该作品系统概念突出,它是从现有通信系统中选取一条典型通信电路,包括了通信网中主要的通信技术。
该实验系统通过DSP与FPGA技术,除可开设PAM,CVSD,PCM,FSK,BPSK等众多基本实验外,还可开设数字复接传输、数字锁相环、ADPCM、DBPSK、汉明编译码等实验,它几乎集成了从通信终端、信号处理、信息传输、网络交换等方面的高新技术。
先进性:该实验系统采用了最先进的设计技术,实验内容与当今通信技术发展紧密结合,是一种科技含量高的高性能通信基础综合实验箱。
实验系统中的FSK、BPSK、DBPSK调制解调器采用同一硬件平台(DSP+FPGA),各种不同的传输系统采用软件实现,并可通过软件升级适应新的实验、新的技术。
该实验系统着重通过模块化的设计,让学生熟悉当今通信系统的组成、采用的相关技术等,可帮助通信专业的学生在通信系统方面建立一个较为完整的框架体系。
该实验系统着重体现在测试、设计和验证上,目的是要加强学生对通信系统概念的正确理解,加强实际的动手能力,为今后能对新设备的操作、维护奠定一个良好的基础。
为今后产品开发打下扎实的基础。