三桨船船模自航试验分析
- 格式:pdf
- 大小:157.36 KB
- 文档页数:5

第六章 船模自航试验及实船性能预估为了获得螺旋桨与船体之间的相互作用诸因素,如伴流分数、推力减额分数以及其他相互作用系数,应进行三种试验:船模阻力试验、螺旋桨敞水试验及有附体的船模自航试验。
船模自航试验是分析研究各种推进效率成分的重要手段。
对于给定的船舶来说,通过自航试验应解决两个问题:① 预估实船性能,即给出主机马力、转速和船速之间的关系,从而给出实船的预估航速,验证设计的船舶是否满足任务书中所要求的航速。
② 判断螺旋桨、主机、船体之间的配合是否良好。
如果配合不佳,则需考虑重新设计螺旋桨。
此外,根据实船试航结果与相应的船模自航试验数据,可以进行船模及实船的相关分析,积累资料以便改进换算办法,使船模试验预报实船的性能更正确可靠。
§ 6-1 自航试验的相似条件及摩擦阻力修正值一、相似定律在船模阻力试验时,我们只满足了傅氏数相同的条件,对于船模的雷诺数只要求超过临界数值。
因此,mm ss g g L V L V =上式中,下标带m 者表示模型数值,带s 者表示实船数值(以下相同)。
在螺旋桨敞水试验时,只满足进速系数相同的条件,对于螺旋桨模型的雷诺数也只要求超过临界数值,因此,mm Am s s As D n VD n V = 在进行船模的自航试验时,两者都要求满足,根据几何相似,有:λD DL L ==ms m s 则满足傅氏数相等时有: λV V /s m = (6-1)满足进速系数相等时有:λn V n V mAms As = 由于 ()s s As 1V ωV -=,()m m Am 1V ωV -= 故()()λn Vωn Vωmmmsss11-=-或 ⎪⎪⎭⎫⎝⎛--=s ms m 11ωω λn n 假定伴流无尺度作用,则m s ωω=,因此,可得:λn n s m = (6-2)(6-1)及(6-2)两式是船模自航试验应满足相似定律的条件,由于船后螺旋桨满足了进速系数相等的条件,因此在不考虑尺度作用的情况下,螺旋桨实桨及其模型在推力、转矩及收到马力方面存在下列关系:⎪⎪⎪⎭⎪⎪⎪⎬⎫===5.3ms Dm Ds 4ms m s 3ms ms λρρP P λρρQ Q λρρT T (6-3)(6-3)式只对螺旋桨说来是正确的,但自航试验是把螺旋桨与船体联系起来统盘考虑的。
船模自航试验及实船性能预估船舶阻力与推进文档来源为:从网络收集整理.word 版本可编辑.欢迎下载支持.第六章船模自航试验及实船性能预估为了获得螺旋桨与船体之间的相互作用诸因素,如伴流分数、推力减额分数以及其他相互作用系数,应进行三种试验:船模阻力试验、螺旋桨敞水试验及有附体的船模自航试验。
船模自航试验是分析研究各种推进效率成分的重要手段。
对于给定的船舶来说,通过自航试验应解决两个问题:① 预估实船性能,即给出主机马力、转速和船速之间的关系,从而给出实船的预估航速,验证设计的船舶是否满足任务书中所要求的航速。
② 判断螺旋桨、主机、船体之间的配合是否良好。
如果配合不佳,则需考虑重新设计螺旋桨。
此外,根据实船试航结果与相应的船模自航试验数据,可以进行船模及实船的相关分析,积累资料以便改进换算办法,使船模试验预报实船的性能更正确可靠。
§ 6-1 自航试验的相似条件及摩擦阻力修正值一、相似定律在船模阻力试验时,我们只满足了傅氏数相同的条件,对于船模的雷诺数只要求超过临界数值。
因此,上式中,下标带m 者表示模型数值,带s 者表示实船数值(以下相同)。
在螺旋桨敞水试验时,只满足进速系数相同的条件,对于螺旋桨模型的雷诺数也只要求超过临界数值,因此,在进行船模的自航试验时,两者都要求满足,根据几何相似,有:则满足傅氏数相等时有:λV V /s m = (6-1) 满足进速系数相等时有:λn V n V mAms As = 由于()s s As 1V ωV -=,()m m Am 1V ωV -= 故()()λn Vωn Vωmmmsss11-=-或--=s ms m 11ωω λn n 假定伴流无尺度作用,则m s ωω=,因此,可得:λn n s m = (6-2)(6-1)及(6-2)两式是船模自航试验应满足相似定律的条件,由于船后螺旋桨满足了进速系数相等的条件,因此在不考虑尺度作用的情况下,螺旋桨实桨及其模型在推力、转矩及收到马力方面存在下列关系:文档来源为:从网络收集整理.word 版本可编辑.欢迎下载支持.===5.3ms Dm Ds 4ms m s 3ms ms λρρP P λρρQ Q λρρT T (6-3)(6-3)式只对螺旋桨说来是正确的,但自航试验是把螺旋桨与船体联系起来统盘考虑的。
一、实验目的1. 了解自动小船的制作原理和过程。
2. 学会使用电子元件和制作简单的电路。
3. 培养动手能力和创新思维。
二、实验原理自动小船是一种利用物理原理和电子技术实现自动航行的模型。
本实验主要利用电动机、舵机、传感器和电路板等元件,通过编写程序实现对小船航行的控制。
三、实验材料1. 小船模型:长30cm,宽15cm,高10cm。
2. 电动机:直流电动机,电压3V。
3. 舵机:舵机,控制角度范围0-180度。
4. 传感器:超声波传感器,用于检测障碍物。
5. 电路板:Arduino板。
6. 导线、电阻、电容等电子元件。
7. 工具:电烙铁、螺丝刀、剪刀等。
四、实验步骤1. 准备工作(1)将小船模型放在平稳的桌面上。
(2)将电动机、舵机和超声波传感器固定在小船模型上。
(3)连接电路板、电动机、舵机和超声波传感器。
2. 编写程序(1)打开Arduino IDE,创建新项目。
(2)编写以下程序:```cpp#include <Servo.h>Servo servo1;Servo servo2;int trigPin = 9;int echoPin = 10;void setup() {servo1.attach(3);servo2.attach(5);pinMode(trigPin, OUTPUT);pinMode(echoPin, INPUT);}void loop() {int distance = getDistance(trigPin, echoPin); if (distance < 20) {servo1.write(90);servo2.write(90);} else {servo1.write(0);servo2.write(180);}}int getDistance(int trigPin, int echoPin) {digitalWrite(trigPin, LOW);delayMicroseconds(2);digitalWrite(trigPin, HIGH);delayMicroseconds(10);digitalWrite(trigPin, LOW);int duration = pulseIn(echoPin, HIGH);int distance = duration 0.034 / 2;return distance;}```(3)上传程序到Arduino板。
船舶与海洋工程实验技术自航试验指导书华中科技大学船舶与海洋工程学院船模拖曳水池实验室2015 年 5月20日目录0、前言 11、船模制作 12、仪器安装及操作 12.1 电测阻力仪 12.2 自航仪 93、自航试验操作 144、试验数据处理 165、实船性能预报 17图目录图1 拉力传感器 2图2 放大器背面接口 3 图3 放大器正面 4图4 8HZ采集程序图标 5 图5 8HZ自航双桨 6图6 8HZ系统设定 7图7 8HZ数据采集 8图8 8HZ数据处理 9图9 自航仪 10图10 电机 11图11 电机操作柜 12图12 转速数字显示仪 13 图13 WD990 微机电源 14 图14 自航试验曲线 16表目录表1 拉力传感器规格表 4表2 自航仪规格表 90、前言自航试验有以下主要目的:(1)分析和研究各种效率成分,研究桨、船两者的相互作用;(2)预报实船性能。
即通过试验给出主机功率、转速和船速之间的关系,得出实船的航速预报,验证设计的船舶是否满足任务;(3)判断螺旋桨、主机、船体之间的配合是否良好。
我们所采用的自航方法为强迫自航法,又称英国法.有关自航的详细理论请参考《船舶性能实验技术》(第五章),俞湘三等主编,上海交通大学出版社。
1、船模制作船模的制作和装载状态的调整都和阻力试验是一样的,此处就不在赘述。
2、仪器安装及操作2.1 电测阻力仪电测阻力仪主要是用来测量强制力Z。
本系统主要由硬件,软件两部分组成:硬件:它是由多组十六路信号放大处理器、采集卡、计算机组成。
原理方框图如下:信号放大处理器主要技术指标:采样通道: 16路输入阻抗:>2MΩ零点漂移: 0.05%精度: 0.05%D/A转换板: 12位精度 0.015%具体操作过程如下:首先,拉力传感器固定在机械阻力台上,如图1所示图1 拉力传感器拉力传感器,一头由数据线连接,到拖车操作室接到放大器背后的接口处,放大器型号为:HG-98 多功能数据处理系统,如图2和图3所示图2 放大器背面接口图3 放大器正面选择通道,如CH5,然后放大器通过采集卡与计算机(靠门口那台)相连。
⼤⼯12春《船模性能实验》实验报告⽹络教育学院《船模性能实验》实验报告学习中⼼:层次:专业:船舶与海洋⼯程学号:学⽣:完成⽇期:实验报告⼀⼀、实验名称:船模阻⼒实验⼆、实验⽬的:主要研究船模在⽔中匀速直线运动时所受到的作⽤⼒及其航⾏状态。
其具体⽬标包括:(1)船型研究通过船模阻⼒实验⽐较不同船型阻⼒性能的优劣。
(2)确定设计船舶的阻⼒性能对具体设计的船舶,通过船模阻⼒实验,计算实船的有效功率,供设计推进器应⽤。
(3)预报实船性能船模⾃航实验前,必须进⾏船模阻⼒实验,为分析⾃航实验结果预报实船提供必要的数据。
(4)系列船模实验为提供各类船型的阻⼒图谱,必须进⾏系列船模的阻⼒实验。
此外还有进⾏⼏何相似船模组实验,其⽬的在于研究推进⽅⾯的⼀些问题。
(5)研究各种阻⼒成分实验为了研究分类,确定某种阻⼒成分,必须进⾏某些专门的实验。
(6)附体阻⼒实验⽬的在于求得附体的阻⼒值以及⽐较不同形式的附体对阻⼒的影响。
(7)流线实验在船模实验的同时,有时还要进⾏船模流线实验,⽬的在于确定舭龙⾻,轴⽀架等附体以及船⾸尾侧推器开孔的位置等。
(8)航⾏状态的研究在船模阻⼒实验时,测量船模在⾼速直线运动时的纵倾及升沉等状态,这对于⾼速排⽔型船,滑⾏快艇、⽔翼艇等⾼速船舶尤为重要。
三、实验原理:1.简述⽔⾯船舶模型阻⼒实验相似准则。
(1)船模与实船保持⼏何相似;(2)船模实验的雷诺数e R 达到临界雷诺数以上;3)船模与实船傅汝德数相等。
2.分别说出实验中安装激流丝和称重⼯作的作⽤。
1)安装激流丝:⽤1=Φmm ⾦属丝缚在船模的19站处使其在⾦属丝以后的边界层中产⽣紊流2)称重⼯作:准确称量船模重量和压载重量,以达到按船模缩尺⽐要求的实船相应的排⽔量。
3.船模阻⼒实验结果换算⽅法有哪些?常⽤的船模阻⼒实验结构换算⽅法有两种,即⼆因次⽅法和三因次⽅法。
⼆因次⽅法亦称傅汝德⽅法;三因此⽅法为1978年ITTC 性能委员会推荐的换算⽅法。
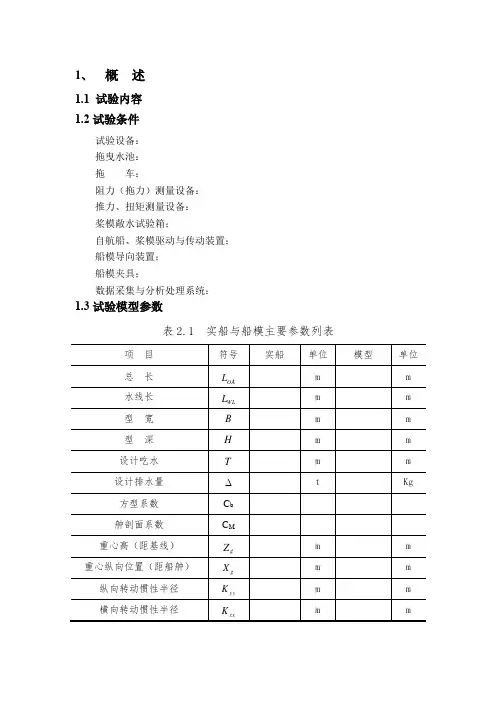
1、概述1.1 试验内容1.2试验条件试验设备:拖曳水池:拖车:阻力(拖力)测量设备:推力、扭矩测量设备:桨模敞水试验箱;自航船、桨模驱动与传动装置;船模导向装置;船模夹具;数据采集与分析处理系统:1.3试验模型参数表2.1 实船与船模主要参数列表螺旋桨模型参数:桨叶数: 4直径:0.17925m盘面比:0.45毂径比:0.15(P/D)1.0R:0.608(P/D)0.7R: 0.637缩尺比: =401.4模型试验方法1.4.1 船模静水拖曳阻力试验水面静止的条件下,闭合夹具,由拖车带动船模至设定航速,释放夹具,并通过阻力测量仪(四自由度适航仪)测量得到该航速下的船模阻力,然后关闭夹具,减速停车,低速退回到起始位置,待水面平静后进行下一航次的试验,如此反复进行,直至完成整个航速范围内的船模阻力试验;记录试验当时水温。
其中,拖点位于船模重心铅垂线上,高度则位于设计水线面,船模导向方式为首导向杆方式,夹具位于船模后部。
1.4.2 螺旋桨模型敞水性能试验螺旋桨模型敞水性能试验采取设定桨模转速,改变桨模进速进行试验的方法。
即每航次中不改变桨模转速(Nm=1260rpm),只改变桨模进速。
所有试验与测量仪器均安放在敞水试验箱内,桨模安装在由敞水箱前端向前伸出的桨轴前端,桨轴长度大于四倍桨模直径,外面包有轴套管,桨模前端安装有导流帽,轴套与敞水箱连接处设有导流罩,桨毂与轴套之间平顺过渡。
具体的实验方法:水面静止的条件下,由拖车带动敞水试验箱至设定航速,同时调整螺旋桨模型至指定转速(1260rpm),通过螺旋桨动力仪测量得到该航速和桨模转速下的桨模推力与扭矩,然后减速停车,低速退回到起始位置,待水面平静后进行下一航次的试验,如此反复进行,直至桨模推力变为负值,停止试验;换装桨毂,以桨模敞水试验对应的航速与桨模转速进行试验,测量得到轴系及桨毂的摩擦力矩和推力修正值;记录试验当时水温。
1.4.3船模自航试验船模自航试验采用强迫自航法。
第l期(总第118期) 2008年6月船舶设计通讯J O U R N A L O F SH I P D E S I G NN O.I(Ser i al N O.118)J une2008多桨船船模自航试验推进因子分析方法探讨审一口笪,L叫[摘要】针对多桨船螺旋桨间互相干扰的影响,通过对三桨船自航试验推进因子分析方法进行分析探讨,提出新的三桨及以上的多桨船船模白航试验方法和其推进因子分析方法。
[关键词]多桨船;自航试验;推进因子[中图分类号】U663.31+3[文献标识码]A[文章编号】100l一4624(2008)O l—0014一03D i s cus s i on on Pr opul s i V e Fa ct or B as ed on Shi p’sSel f.pr opul s i on T es t w i t h M ul t i-s cr ewShi Y i m i ngA bs t r act:Focus i ng on t he i nt e ra ct i on am ong t he sc re w s,t he paper an al yzed t he c u r r ent m et hod of det enni ni ng propul s i ve f a ct or based on shi p’s s el f-pr opul si on t es t w i t h t hr e e—sc r e w and pr esent ed a new m et hod t o t es t a nd an al yzed propul s i V e f a ct or of s hi p w i t h m ul t i-s cr ew.K eyw or ds:m ul t i-s cr ew s hi p;se l f-pm pul si on t e st;pr opul si V e fa ct orO概述多桨船自航试验时.由于螺旋桨之间互相干扰等众多因素的影响。
大工春《船模性能实验》实验分析报告doc大工春《船模性能实验》实验报告doc作者: 日期:姓名:__________________________报名编号:_______________________学习中心:_______________________层次:__________________________专业:__________________________实验1:船模阻力实验一、实验知识考察1、简述水面船舶模型阻力实验相似准则。
答:由阻力相似定律可知:如果船模和实船能实现全相似,即船模和实船同时滿足Re和Fr数相等,则可由船模试验结果直接获得实船的总阻力系数,实船的总阻力也可精确确定。
但是船模和实船同时滿足Re和Fr数相等的所谓全相似条件实际上是难以实现的。
船摸与实船保持几何相似;船模试验的雷诺数Re达到临界雷诺数以上;船摸与实船傅汝德数相等。
2、船模阻力实验结果换算方法有哪些?答:常用的船模阻力试验结果换算方法有两种,即二因次方法和三因次方法?二因次方法亦称傅汝德方法;三因次方法(也称1+K法)为1978年ITTC性能委员会推荐的换算方法?这两种方法的区别在于对粘性阻力的处理原则不同。
二、实验后思考题1、船模阻力实验结果换算方法之间的区别是什么?答:常用的船模阻力实验结构换算方法有两种,即二因次方法和三因次方法。
这两种方法的区别在于对粘性阻力的处理原则不同。
2、实船摩擦阻力计算中,粗糙度补贴系数是根据什么选取的?答:实船船体表面比较粗糙,故实船摩擦阻力为其中为粗糙度补贴系数,按不同船长选取。
实验2:螺旋桨敞水实验一、实验知识考察1、简述螺旋桨模型敞水实验必须满足的条件。
答:根据敞水试验相似定理的讨论,螺旋桨模型敞水试验必须满足以下条件:亏1) 几何相似;2) 螺旋桨模型有足够的浸深(傅汝德数可不考虑);为了消除自由表面对螺旋桨水动力性影响,桨模的浸深一般应满足hs>=(0.625-1.0)Dmhs为桨轴中心线距水表面的距离(m), D m为桨模直径。
船模自航试验报告
一、船模自航试验的现实意义和目的
通过船模阻力试验及螺旋桨模型敞水试验,我们分别求得船体阻力曲线及螺旋桨敞水性能曲线。
但实际上,船体和螺旋桨对实船而言是一个整体,按装于船体后面的螺旋桨与船体之间彼此影响附近的水流速度场和压力场,而且这种影响非常复杂,迄今还不能用纯粹的理论计算方法求得。
依目前的研究水平,船模自航试验仍然是研究船体和螺旋桨之间相互作用的最好方法。
船模自航试验的主要目的:
1、分析研究各种推进效率成份,研究桨、船两者的相互影响,从而为螺旋桨的修改设计提供依据,或从若干船体与螺旋桨的组合方案中选优。
2、预报实船性能。
即通过试验给出主机功率、转速和船速之间的关系,得出实船的航速预报。
3、判断螺旋桨、主机、船体之间的配合是否良好。
二、船模自航试验报告
1 试验相关数据
船模满载吃水状态水线长度:L=3.803m
船模满载吃水状态浸湿面积:S=2.737m²
模型缩尺比:λ=40
螺旋桨模型直径:D=0.1175m
螺旋桨模型叶数:Z=4
螺旋桨模型缩尺比:P/D=0.8
2实验数据(试验水温:t=淡水20℃)
3船模自航实验曲线图(n—z、T、Q)。
船舶操纵性自航模试验不确定度分析摘要:随着经济和科技水平的快速发展,操纵性是船舶重要的水动力性能之一,它与船舶航行安全密切相关,在船舶的设计阶段需对其操纵性能进行评估。
操纵性自航模试验是评估船舶操纵性能的重要技术手段。
浅水中操纵性自航模试验结果的不确定度水平。
给出了操纵性自航模试验结果的不确定度水平,包括Z形试验的超越角及回转试验的纵距、战术直径和稳定回转直径。
并针对回转试验的回转直径及Z形试验的超越角进行了不确定度计算。
对操纵性自航模试验的不确定度分析方法进行研究,形成自航模试验的不确定度分析方法;并以某集装箱船为研究对象,给出了回转试验和Z形试验的不确定度水平。
关键词:操纵性;自航模试验;不确定度引言由于气垫船自航模自由航行不受约束,且距离岸基有一定距离,其远程无线控制尤为关键。
在保证远程控制指令数据长距离传输稳定的同时,气垫船自航模其自身操作的复杂性,也应保证其远程控制系统具备大量数据互换的能力。
该文针对用于无约束状态下的模型试验气垫艇船自航模远程控制方法进行详细介绍,其中包括气垫船自航模自控系统与远程控制实施方法。
1系统工作流程系统工作流程分为两部分:一部分是图像采集和处理并与伺服系统形成闭环,调节船模成像到图像的正中心;另一部分是当船模成像到达图像正中心后,采集当前水平与垂直伺服系统的角度,计算当前船模坐标并与上一坐标点进行关联,绘制运行路径。
2自航模试验简介本文介绍的气垫船自航模总长小于5m,总重小于200kg它不同于常规水线面船艇,具有总重轻、航速高的特征,还包含水线面船艇所没有的围裙、空气螺旋桨、垫升风机、空气舵等特种设备。
同时,所进行的试验需在无障碍物的开阔水域进行,水域面积不小于1.5km×1.5km,数据传输距离长和数据传输同时性也需要保障。
自航模运动进行非线性仿真试验时,选择在开阔水域以获得相对真实的试验数据,因此,开阔水域对自航模远离岸基的远程操作控制提出了较高的要求。
船舶阻力船模实验报告实验目的:本实验旨在通过船舶阻力的船模实验,探究船舶在运动中所受到的阻力及其影响因素,并对实验结果进行分析和讨论。
实验装置和材料:1. 船模装置:用于模拟真实船舶运动的实验装置,包括船模、推进器、测力传感器等。
2. 测力传感器:用于测量船模受到的阻力大小。
3. 航行介质:为了保证实验的准确性和可重复性,我们选择使用同质的水作为航行介质。
4. 启动装置:用于控制船模的启动和停止,确保实验过程的可控性。
实验步骤:1. 准备工作:安装船模、推进器和测力传感器,并确保各设备的正常运作。
2. 实验参数设置:根据实验需要,设置船模的初始位置、速度和船模与水的接触面积等参数。
3. 开始实验:启动装置使船模开始运动,在船模运动的过程中,测力传感器记录下船模所受到的阻力。
4. 实验数据记录:根据实验参数设置,实时记录下船模受到的阻力大小和相应的运动参数,如速度、时间等。
5. 实验重复:重复实验步骤3和步骤4,进行多次试验,以获得更加准确和可靠的数据。
6. 实验结束:停止船模运动,关闭实验装置,记录实验过程中的观察和发现。
实验数据处理和分析:1. 数据处理:整理所获得的实验数据,计算不同条件下船模受到的平均阻力和标准差。
2. 数据分析:根据实验数据,探究船舶阻力与船模初始速度、接触面积等参数之间的关系,并进行相关性分析。
3. 结果讨论:根据实验分析的结果,讨论船舶阻力的影响因素,并解释实验结果的合理性。
4. 总结:对实验过程和结果进行总结,提出改进实验设计和进一步研究的建议。
实验安全注意事项:1. 在实验过程中,注意保持实验区域的整洁和安全,避免杂物或障碍物对实验的干扰。
2. 操作实验装置时,注意遵守使用说明和操作规程,确保设备的正常运作和人身安全。
3. 在实验过程中,严禁向实验区域投掷物体或进行不安全操作,保证实验环境的安全。
4. 当实验装置出现故障或异常情况时,应立即停止实验,并及时报告相关人员进行处理。
基础科技船舶物资与市场 050 引言多年来,不确定度分析在各行各业中尤其是试验测试相关领域一直被予以重视和应用。
船舶水动力试验分析领域,船模阻力试验、自航试验和螺旋桨敞水试验等模型试验方法是研究船舶水动力性能的重要方法,良好的测试结果将为船舶设计人员提供有效和充分的依据。
国际船模拖曳水池会议(ITTC )制定了相关模型试验的不确定度分析推荐规程[1-4],并且仍在在不断修改和完善。
随着2013年EEDI 的强制实施,船东、船厂、船舶设计人员越来越重视模型试验结果的可靠性和准确性。
此外,船级社也参与到了船舶模型测试之中,亲临现场见证模型试验质量文档和试验测试全过程。
因此,船舶模型试验不确定度分析的重视程度与日俱增。
参考ITTC 推荐规程,国内外科研技术人员近些年也开展了一系列的船舶模型试验不确定度分析研究。
Joe Longo 等[5]介绍了一艘3.048 m 长DTMB 模型的拖曳试验不确定度评估方法、流程和结果,测试了包括阻力、深沉、纵倾、波形、波高等内容。
周广利等[6]在哈尔滨工程大学船模拖曳水池开展了一艘3 m 玻璃钢标准船模拖曳阻力不确定度分析,计算得出各阻力系数的偏差值,并就提高阻力测量系统精确度提出了建议。
吴宝山[7]认为在船模试验不确定度分析的规程中,对于无量纲化的几何参数,采用无量纲表达式进行分析评定的同时还需基于水动力学的分析进行合理的评定。
施奇等[8]在江苏科技大学拖曳水池开展了标模的重复阻力试验,计算分析各项阻力系数的偏差限、精度限和总不确定度。
除船模阻力试验之外,螺旋桨敞水试验和船模自航试验也是船舶航速预报系统与水动力分析关键试验内容,本文以船模阻力自航和螺旋桨敞水试验不确定度分析崔 健,陆泽华,陈 涛(上海船舶运输科学研究所 航运技术与安全国家重点实验室 航运技术交通行业重点实验室,上海 200135)摘 要 :船模阻力、自航和螺旋桨敞水试验是船舶水动力性能最基本的试验,因此模型试验的不确定度评定质量的高低对船舶航速预报结果是否达到精度要求有着一定程度的影响。
第1篇一、实验背景随着科技的不断发展,自动化技术在各个领域得到了广泛应用。
在船舶领域,自动行驶技术的研究与开发也取得了显著成果。
本实验旨在探究船自动行驶的原理,并通过实验验证其可行性。
二、实验目的1. 了解船自动行驶的原理;2. 掌握船自动行驶系统的基本构成;3. 通过实验验证船自动行驶的可行性;4. 分析影响船自动行驶的因素。
三、实验原理船自动行驶技术主要基于以下原理:1. 感测原理:通过传感器获取船体周围环境信息,如GPS定位、姿态传感器、速度传感器等;2. 控制原理:根据传感器获取的信息,通过控制算法计算出最佳行驶路径,并控制船舶舵机、推进器等执行机构实现自动行驶;3. 通信原理:通过无线通信技术实现船与岸基控制中心、其他船舶之间的信息交互。
四、实验材料与设备1. 实验材料:船模型、舵机、推进器、传感器、控制模块、通信模块、电源等;2. 实验设备:实验台、电源、计算机、编程软件等。
五、实验步骤1. 准备实验材料与设备,搭建实验平台;2. 连接传感器、控制模块、通信模块等,确保各部件正常工作;3. 编写控制程序,实现船自动行驶功能;4. 进行实验,观察船自动行驶的效果;5. 分析实验数据,总结实验结果。
六、实验结果与分析1. 实验结果通过实验,成功实现了船的自动行驶。
在实验过程中,船能够根据预设的航线和速度自动调整航向和速度,达到预期效果。
2. 实验分析(1)传感器的作用:传感器是船自动行驶系统的重要组成部分,其性能直接影响着船的行驶效果。
本实验中,传感器能够准确获取船体周围环境信息,为控制算法提供可靠的数据支持。
(2)控制算法的优化:控制算法是船自动行驶系统的核心,其性能直接影响着船的行驶稳定性。
通过优化控制算法,可以提高船的行驶精度和稳定性。
(3)通信技术的应用:通信技术在船自动行驶系统中发挥着重要作用。
本实验中,通过无线通信技术实现船与岸基控制中心、其他船舶之间的信息交互,提高了船的行驶安全性。