第二章(1) 数学模型(微分方程)A
- 格式:ppt
- 大小:1.03 MB
- 文档页数:44


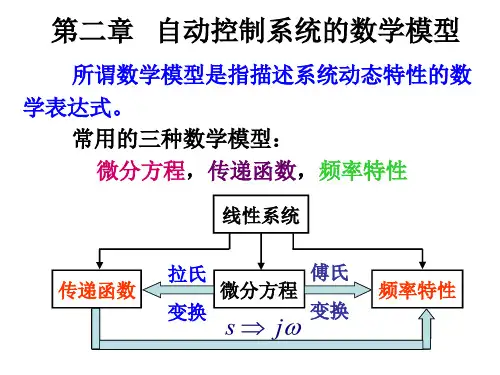
控制系统数字仿真与CAD第二章习题答案2-1 思考题:(1)数学模型的微分方程,状态方程,传递函数,零极点增益和部分分式五种形式,各有什么特点?(2)数学模型各种形式之间为什么要互相转换?(3)控制系统建模的基本方法有哪些?他们的区别和特点是什么?(4)控制系统计算机仿真中的“实现问题”是什么含意?(5)数值积分法的选用应遵循哪几条原则?答:(1)微分方程是直接描述系统输入和输出量之间的制约关系,是连续控制系统其他数学模型表达式的基础。
状态方程能够反映系统内部各状态之间的相互关系,适用于多输入多输出系统。
传递函数是零极点形式和部分分式形式的基础。
零极点增益形式可用于分析系统的稳定性和快速性。
利用部分分式形式可直接分析系统的动态过程。
(2)不同的控制系统的分析和设计方法,只适用于特定的数学模型形式。
(3)控制系统的建模方法大体有三种:机理模型法,统计模型法和混合模型法。
机理模型法就是对已知结构,参数的物理系统运用相应的物理定律或定理,经过合理的分析简化建立起来的各物理量间的关系。
该方法需要对系统的内部结构和特性完全的了解,精度高。
统计模型法是采用归纳的方法,根据系统实测的数据,运用统计规律和系统辨识等理论建立的系统模型。
该方法建立的数学模型受数据量不充分,数据精度不一致,数据处理方法的不完善,很难在精度上达到更高的要求。
混合法是上述两种方法的结合。
(4)“实现问题”就是根据建立的数学模型和精度,采用某种数值计算方法,将模型方程转换为适合在计算机上运行的公式和方程,通过计算来使之正确的反映系统各变量动态性能,得到可靠的仿真结果。
(5)数值积分法应该遵循的原则是在满足系统精度的前提下,提高数值运算的速度和并保证计算结果的稳定。
2-2.用matlab语言求下列系统的状态方程、传递函数、零极点增益、和部分分式形式的模型参数,并分别写出其相应的数学模型表达式:(1) G(s)=324327242410355024s s ss s s s+++++++(2).X=2.25 -5 -1.25 -0.542.25 -4.25 -1.25 -0.2520.25 -0.5 -1.25 -121.25 -1.75 -0.25 -0.75 0X⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦u y=[0 2 0 2] X(1)解:(1)状态方程模型参数:编写matlab程序如下>> num=[1 7 24 24];>> den=[1 10 35 50 24];>> [A B C D]=tf2ss(num,den)得到结果:A=-10 -35 -50 -241 0 0 00 1 0 00 0 1 0⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦,B=1⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦,C=[]1 7 24 24,D=[0]所以模型为:.X=-10 -35 -50 -241 0 0 00 1 0 00 0 1 0⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦X+1⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦u,y=[]1 7 24 24X(2)零极点增益:编写程序>> num=[1 7 24 24];>> den=[1 10 35 50 24];>> [Z P K]=tf2zp(num,den)得到结果Z= -2.7306 + 2.8531 , -2.7306 - 2.8531i ,-1.5388P= -4, -3 ,-2 ,-1K=1(3) 部分分式形式:编写程序>> num=[1 7 24 24];>> den=[1 10 35 50 24];>> [R P H]=residue(num,den)得到结果R= 4.0000 ,-6.0000, 2.0000, 1.0000P= -4.0000, -3.0000 , -2.0000 ,-1.0000 H=[]G(s)=46214321s s s s -+++++++(2)解:(1)传递函数模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.250.25 -0.5 -1.25 -1 1.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [num den]=ss2tf(A,B,C,D)得到结果num = 0 4.0000 14.0000 22.0000 15.0000 den =1.0000 4.0000 6.2500 5.2500 2.2500324324 s + 14 s + 22 s + 15()s + 4 s + 6.25 s + 5.25 s + 2.25G s =(2) 零极点增益模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.25 0.25 -0.5 -1.25 -1 1.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [Z,P,K]=ss2zp(A,B,C,D)得到结果Z =-1.0000 + 1.2247i -1.0000 - 1.2247i -1.5000P= -0.5000 + 0.8660i -0.5000 - 0.8660i -1.5000 -1.5000 K = 4.0000表达式 ()()()()()4s+1-1.2247i s+1+1.2247i ()s+0.5-0.866i s+0.5+0.866i s+1.5G s =(3)部分分式形式的模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.25 0.25 -0.5 -1.25 -11.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [num den]=ss2tf(A,B,C,D)>> [R,P,H]=residue(num,den)得到结果R = 4.0000 -0.0000 0.0000 - 2.3094i 0.0000 + 2.3094iP = -1.5000 -1.5000 -0.5000 + 0.8660i -0.5000 - 0.8660i H =[]4 2.3094 2.3094() 1.50.50.8660.50.866i iG s s s i s i=-+++-++2-3.用欧拉法求下面系统的输出响应y(t)在0≤t ≤1上,h=0.1时的数值。
单选1、自动控制系统的数学模型为(A )。
A 微分方程、传递函数、动态结构框图、信号流图;B 梅森公式;C 状态方程、差分方程D 热学方程。
2、数学模型是描述系统输入量、输出量及系统各变量之间关系的(A)。
A 数学表达式;B 传递函数;C 信号流图;D 动态结构框图。
3、在线性定常系统中,当初始条件为零时,系统输出的拉氏变换与输入的拉氏变换之比称作系统的(B)。
A 信号流图;B;传递函数C 动态结构框图;D 以上都对。
4、传递函数的定义为(B )。
A 系统输出的拉氏变换与输入的拉氏变换之比;B 在线性定常系统中,当初始条件为零时,系统输出的拉氏变换与输入的拉氏变换之比;C ;D 以上三者都是。
5、传递函数是经典控制理论的数学模型之一,她具有如下特点(B )。
A它可以反映出系统输入输出之间的动态性能,但不能反映系统结构参数对输出的影响;B 传递函数表示系统传递、变换输入信号的能力,只与系统的结构和参数有关,与输入输出信号灯形式无关;C传递函数表示系统传递、变换输入信号的能力,不仅与系统的结构和参数有关,而且与输入输出信号灯形式有关;D 传递函数与系统微分方程式之间不可以相互转换。
6、自动控制系统的典型环节有(C)A 比例环节、惯性环节、积分环节、微分环节、振荡环节;B 比例环节、惯性环节、积分环节、微分环节、振荡环节、一阶微分环节、二阶微分环节;C 比例环节、惯性环节、积分环节、微分环节、振荡环节、一阶微分环节、二阶微分环节、时滞环节;D 比例环节、惯性环节、积分环节、微分环节、振荡环节、一阶微分环节、二阶微分环节、时滞环节;正弦、余弦等。
7、自动控制系统的动态结构图由哪些基本单元组成( B )A 信号线、引出点、综合点、方框、比较环节;B 信号线、引出点、综合点、方框;C 信号线、引出点、综合点、方框、前向通道、反馈通道;D 信号线、引出点、综合点、方框、前向通道、反馈通道、给定信号、输出信号。