(有具体仿真,有各种图)(基于SIMULINK异步电动机软起动控制系统的仿真
- 格式:pdf
- 大小:664.44 KB
- 文档页数:4
V ol. 17 No. 9系统仿真学报Sept. 2005JOURNAL OF SYSTEM SIMULATION• 2099 •基于Simulink/PSB的异步电机变频调速系统的建模与仿真张兴华(南京工业大学自动化学院,南京 210009)摘 要:针对PWM逆变器供电驱动的异步电机矢量控制变频调速系统的特点,利用Simulink和Power System Blocksets,采用结构化和模块化的方法,对异步电机变频调速系统进行建模和仿真,详细介绍了各子模块的构造方法及功能。
仿真模型可以逼真地模拟实际系统,实现简单,便于修改。
仿真结果验证了建模方法的有效性。
关键词:异步电机;变频调速;矢量控制;建模;仿真文章编号:1004-731X(2005)09-2099-05 中图分类号:TP391.9文献标识码:AModeling and Simulation for Variable-Frequency Drivesof Asynchronous Motors Based on Simulink/PSBZHANG Xing-hua(School of Automation, Nanjing University of Technology, Nanjing 210009, China)Abstract: Modeling and simulating for variable-frequency drive of asynchronous motors using Simulink and Power System Blocksets is proposed. A structure and blocking modeling method is applied to set up the model of vector control drive for an asynchronous motor. And the function of every sub-model is introduced in detail. The proposed model can simulate the actual system very well. It can be obtained easily and be modified conveniently. The simulation results prove that the effectiveness of the proposed modeling method.Key words: asynchronous motor; variable-frequency drive; vector control; modeling; simulation引言交流异步电机具有坚固耐用、维护方便、可靠性高、大容量,宽调速范围和价格低廉等优点,在现代交流传动系统中得到广泛应用。

基于Matlab/Simulink 的异步电机矢量控制系统仿真摘要在异步电机的数学模型分析中以及矢量控制系统的基础之上,利用Matlab/Simulink运用建立模块的思想分别组建了坐标变换模块、PI调节模块、转子磁链个观测模块、SVPWM等模块,然后将这些模块有机的结合,最后构成了异步电动机矢量控制的仿真模块,并且进行了仿真验证。
仿真结果分别显示了电机空载与负载情况下转矩、转速的动态变化曲线,验证了该方法的有效性、实用性,为电机在实际使用中打下了坚实的基础。
本文主要研究异步电机在矢量控制下的仿真。
使用Matlab/Simulink中的电气系统模块(PowerSystem Blocksets)将其重组得到新的模型并对其仿真,最后分析仿真结果得出结论。
关键词: 异步电机矢量控制 MATLAB/SIMULINK 变频调速目录摘要 (I)Abstract......................................................................................... 错误!未定义书签。
1 绪论 (1)1.1 电机及电力拖动技术的发展概况 (1)1.2 异步电动机的控制技术现状................................................. 错误!未定义书签。
1.3 仿真软件的简介及其选择..................................................... 错误!未定义书签。
1.4 论文的主要内容及结构安排................................................. 错误!未定义书签。
2 异步电动机的数学模型 (4)2.1 异步电动机的稳态数学模型 (4)2.2 异步电动机的动态数学模型 (5)2.3 本章小结 (7)3 矢量控制系统基本思路 (8)3.1 矢量控制的基本原理 (8)3.2 坐标变换 (9)3.3SVPWM调制 (21)3.3本章小结 (11)4 异步电机矢量控制系统仿真 (14)4.1矢量控制系统模型 (14)4.2仿真结果与分析 (15)4.5本章小结 (17)5结论与展望 (18)5.1结论 (18)5.2后续研究工作的展望 (19)参考文献 ....................................................................................... 错误!未定义书签。
基于MatlabSimulink的异步电机矢量控制系统仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电机矢量控制系统已成为现代电机控制领域的重要分支。
该系统通过精确控制异步电机的磁通和转矩,实现了对电机的高效、稳定和动态性能的优化。
Matlab/Simulink作为一种强大的仿真工具,为异步电机矢量控制系统的研究和设计提供了便捷的平台。
本文旨在探讨基于Matlab/Simulink的异步电机矢量控制系统仿真方法。
文章将简要介绍异步电机矢量控制的基本原理和关键技术,包括空间矢量脉宽调制(SVPWM)技术、转子磁链观测技术以及矢量控制策略等。
详细阐述如何利用Matlab/Simulink搭建异步电机矢量控制系统的仿真模型,包括电机模型、控制器模型以及系统仿真模型的构建过程。
文章还将探讨仿真模型的参数设置、仿真过程以及仿真结果的分析方法。
通过本文的研究,读者可以深入了解异步电机矢量控制系统的基本原理和仿真方法,掌握基于Matlab/Simulink的仿真技术,为异步电机矢量控制系统的实际设计和应用提供有益的参考和借鉴。
本文的研究也有助于推动异步电机矢量控制技术的发展和应用领域的拓展。
二、异步电机基本原理异步电机,又称感应电机,是一种广泛应用于工业领域的电动机。
其基本原理基于电磁感应和电磁力作用。
异步电机主要包括定子(静止部分)和转子(旋转部分)。
定子通常由铁芯和三相绕组构成,而转子则可能由实心铁芯、鼠笼型或绕线型结构组成。
当异步电机通电时,定子绕组中的三相电流会产生旋转磁场。
这个旋转磁场与转子中的导体相互作用,根据法拉第电磁感应定律,会在转子导体中产生感应电动势和感应电流。
这些感应电流在旋转磁场的作用下,受到电磁力的作用,从而使转子产生旋转力矩,驱动转子旋转。
异步电机的旋转速度与定子旋转磁场的旋转速度并不完全同步,这也是其被称为“异步”电机的原因。
异步电机的旋转速度通常略低于旋转磁场的同步速度,这是由于转子导体的电感和电阻导致的电磁延迟效应。

作者简介:冉振亚(1949-),男,重庆大学副教授;从事汽车绿色技术及天然气汽车技术的开发工作。
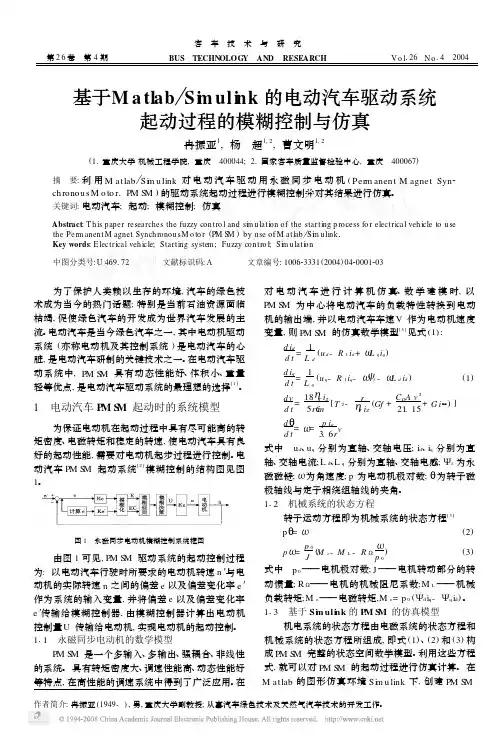
基于M a tlab Si m ul i nk 的电动汽车驱动系统起动过程的模糊控制与仿真冉振亚1,杨 超1,2,曹文明1,2(11重庆大学机械工程学院,重庆 400044;21国家客车质量监督检验中心,重庆 400067)摘 要:利用M atlab Si m u link 对电动汽车驱动用永磁同步电动机(Perm anen t M agnet Syn 2ch ronou s M o to r ,PM S M )的驱动系统起动过程进行模糊控制并对其结果进行仿真。
关键词:电动汽车;起动;模糊控制;仿真Abstract :T h is paper researches the fuzzy con tro l and si m u lati on of the starting p rocess fo r electrical veh icle to u sethe Perm anen t M agnet Synch ronou sM o to r (P M S M )by u se of M atlab Si m u link 1Key words :E lectrical veh icle ;Starting system ;Fuzzy con tro l ;Si m u lati on中图分类号:U 469172 文献标识码:A 文章编号:100623331(2004)0420001203 为了保护人类赖以生存的环境,汽车的绿色技术成为当今的热门话题;特别是当前石油资源面临枯竭,促使绿色汽车的开发成为世界汽车发展的主流。
电动汽车是当今绿色汽车之一,其中电动机驱动系统(亦称电动机及其控制系统)是电动汽车的心脏,是电动汽车研制的关键技术之一。
在电动汽车驱动系统中,PM S M 具有动态性能好、体积小、重量轻等优点,是电动汽车驱动系统的最理想的选择[1]。
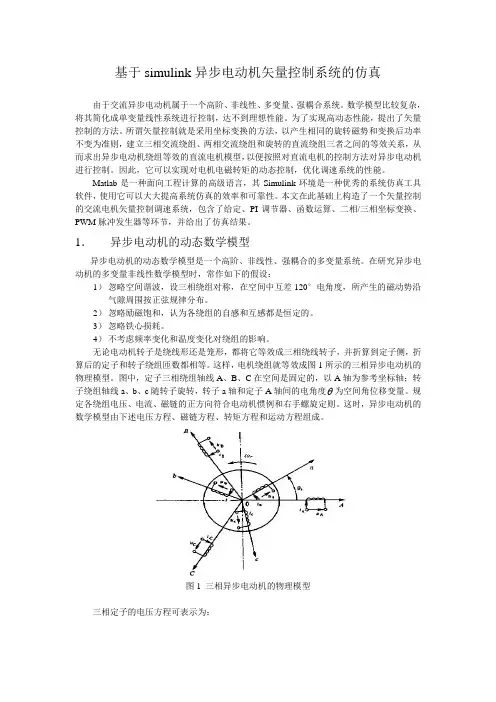
基于simulink异步电动机矢量控制系统的仿真由于交流异步电动机属于一个高阶、非线性、多变量、强耦合系统。
数学模型比较复杂,将其简化成单变量线性系统进行控制,达不到理想性能。
为了实现高动态性能,提出了矢量控制的方法。
所谓矢量控制就是采用坐标变换的方法,以产生相同的旋转磁势和变换后功率不变为准则,建立三相交流绕组、两相交流绕组和旋转的直流绕组三者之间的等效关系,从而求出异步电动机绕组等效的直流电机模型,以便按照对直流电机的控制方法对异步电动机进行控制。
因此,它可以实现对电机电磁转矩的动态控制,优化调速系统的性能。
Matlab是一种面向工程计算的高级语言,其Simulink环境是一种优秀的系统仿真工具软件,使用它可以大大提高系统仿真的效率和可靠性。
本文在此基础上构造了一个矢量控制的交流电机矢量控制调速系统,包含了给定、PI调节器、函数运算、二相/三相坐标变换、PWM脉冲发生器等环节,并给出了仿真结果。
1.异步电动机的动态数学模型异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
在研究异步电动机的多变量非线性数学模型时,常作如下的假设:1)忽略空间谐波,设三相绕组对称,在空间中互差120°电角度,所产生的磁动势沿气隙周围按正弦规律分布。
2)忽略励磁饱和,认为各绕组的自感和互感都是恒定的。
3)忽略铁心损耗。
4)不考虑频率变化和温度变化对绕组的影响。
无论电动机转子是绕线形还是笼形,都将它等效成三相绕线转子,并折算到定子侧,折算后的定子和转子绕组匝数都相等。
这样,电机绕组就等效成图1所示的三相异步电动机的物理模型。
图中,定子三相绕组轴线A、B、C在空间是固定的,以A轴为参考坐标轴;转子绕组轴线a、b、c随转子旋转,转子a轴和定子A轴间的电角度 为空间角位移变量。
规定各绕组电压、电流、磁链的正方向符合电动机惯例和右手螺旋定则。
这时,异步电动机的数学模型由下述电压方程、磁链方程、转矩方程和运动方程组成。
基于Matlab/Simulink 的异步电机矢量控制系统仿真摘要在异步电机的数学模型分析中以及矢量控制系统的基础之上,利用Matlab/Simulink运用建立模块的思想分别组建了坐标变换模块、PI调节模块、转子磁链个观测模块、SVPWM等模块,然后将这些模块有机的结合,最后构成了异步电动机矢量控制的仿真模块,并且进行了仿真验证。
仿真结果分别显示了电机空载与负载情况下转矩、转速的动态变化曲线,验证了该方法的有效性、实用性,为电机在实际使用中打下了坚实的基础。
本文主要研究异步电机在矢量控制下的仿真。
使用Matlab/Simulink中的电气系统模块(PowerSystem Blocksets)将其重组得到新的模型并对其仿真,最后分析仿真结果得出结论。
关键词: 异步电机矢量控制 MATLAB/SIMULINK 变频调速目录摘要 (I)Abstract......................................................................................... 错误!未定义书签。
1 绪论 (1)1.1 电机及电力拖动技术的发展概况 (1)1.2 异步电动机的控制技术现状................................................. 错误!未定义书签。
1.3 仿真软件的简介及其选择..................................................... 错误!未定义书签。
1.4 论文的主要内容及结构安排................................................. 错误!未定义书签。
2 异步电动机的数学模型 (4)2.1 异步电动机的稳态数学模型 (4)2.2 异步电动机的动态数学模型 (5)2.3 本章小结 (7)3 矢量控制系统基本思路 (8)3.1 矢量控制的基本原理 (8)3.2 坐标变换 (9)3.3SVPWM调制 (21)3.3本章小结 (11)4 异步电机矢量控制系统仿真 (14)4.1矢量控制系统模型 (14)4.2仿真结果与分析 (15)4.5本章小结 (17)5结论与展望 (18)5.1结论 (18)5.2后续研究工作的展望 (19)参考文献 ....................................................................................... 错误!未定义书签。
基于SIMULINK的异步电机的建模与仿真摘要利用MATLAB软件中的动态仿真工具SIMULINK,构建了异步电机的仿真模型,并通过实验验证了所建电机模型的可行性、与实用性。
关键词异步电机建模仿真MATLAB/SIMULINK1 引言随着电力电子技术的飞速进步和交流电机调速理论的不断深入。
异步电机的应用日益广泛。
然而异步电机是一个高阶、非线性、强耦合的多变量系统。
通过坐标变换,可以消除瞬变过程中的周期性时变系统和降低方程的阶数,从而简化数学模型,基于这种观念,利用计算机仿真技术去建模既省时又直观。
本文采用异步电机基于两相静止坐标系下的数学模型,结合坐标变换,利用MATLAB软件中的动态仿真SIMULINK,建立异步电机的仿真模型。
并通过实例进行实时仿真。
2 基于静止坐标系下异步电机数学模型异步电机的数学建模方法是将三相电机转换成两相电机,按两相电机建模。
2.1电压矩阵方程异步电机在两相静止坐标系中的电压矩阵方程为式中,uα1,uβ1分别是异步电机在α、β轴上定子电压分量;uα2,uβ2分别是异步电机在α、β轴上转子电压分量;iα1,iβ1分别是异步电机在α、β轴上定子电流分量;iα2,iβ2分别是异步电机在α、β轴上转子电流分量;R1、R2分别为定、转子电阻;L1、L2分别为定、转子电感;L m为互感;s为微分算子;ω为转子角速度特别地,对于笼型电机转子侧电压为零。
2.2三相-二相变换三相对称静止绕组,通以三相平衡的正弦电流,产生合成磁动势,以同步转速旋转,则此三相称为三相静止坐标系。
两相静止绕组,它们在空间互差90度电角度,且通入时间上互差90度的两相电流,也产生与上相同的磁动势,则把此两相称为两相静止坐标系。
若它们的磁动势空间位置一致、幅值和转速相等,故可认为这两种坐标系等效。
三相-两相的转换矩阵如下:2.3转矩和运动方程转矩方程式为:式中p n为电机的极对数;J为电机的转动惯量;T l为负载转矩。
基于Matlab/Simulink异步电机矢量控制系统仿真1、Matlab仿真程序及各仿真系统工作原理首先,读懂本文献并结合相关参考文献,分析异步电机矢量控制系统机构原理。
1.1矢量控制系统分析矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
其中等效的直流电动机模型如图1所示,在三相坐标系上的定子交流电流i A、i B、i C,通过3/2变换可以等效成两相静止正交坐标系上的交流i sα和i sβ,再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流i sm和i st。
图1矢量控制系统原理结构图其次,原理分析清楚后,利用Matlab/Simulink强大的仿真能力,建立交流异步电机控制系统的仿真模型。
由于老师所给文献篇幅有限,学生又查阅了相关文献,结合其他相关文献,将控制系统分为几个功能模块:转速调节模块、定子电流励磁分量模块、定子电流转矩分量调节模块和坐标变换模块等,将这些模块有机组合,就可在Matlab/Simulink中搭建出交流异步电机系统的仿真模型。
1.2转速(ASR)调节模型图2 转速控制模型1.3磁链(APsirR、ACMR)控制模型图3 磁链控制模型1.4转矩计算(ACTR)模型图4 转矩控制模型1.5坐标变换(2s/2r、2r/2s)模型图5 坐标变换模块模型1.6整体模型图6 整体模型2、仿真结果及分析由于学生能力有限,在按照相关文献上的程序编写后,大致模块已经建立出来,但是,在电机建模上不太清楚,不能完整的运行程序,故无法来改变参数来进行完整的仿真,希望老师能够谅解。
第26卷第3期 辽 宁 工 学 院 学 报 V ol.26,No.3 2 0 0 6 年6月 Journal of Liaoning Institute of Technology Jun. 2006收稿日期:2005-03-14作者简介:耿大勇(1971-),男(满族),辽宁兴城人,副教授,硕士。
基于SIMULINK 异步电动机软起动控制系统的仿真耿大勇1,贾 丹2,李振刚1(1.辽宁工学院 信息科学与工程学院,辽宁 锦州 121001; 2.辽宁工学院 计算机科学与工程学院,辽宁 锦州121001)摘 要:异步电动机的软起动可控制电动机的起动电压和电流,减少电动机起动过程对电网和负载的冲击,同时保证电动机运行平稳。
利用MATLAB 软件中的动态仿真工具Simulink 对采用PI 电流闭环控制的异步电动机软起动系统建模并进行了实例仿真。
仿真结果和实验结果吻合较好,证明仿真方法是正确、有效的。
关键词:异步电动机;软起动;仿真;Simulink中图分类号:TP391.9 文献标识码:A 文章编号:1005-1090(2006)03-0141-04Simulation of Soft Starting Control System forAsynchronous Motor Based on SIMULINKGENG Da-yong 1, JIA Dan 2, LI Zhen-gang 1(rmation Science & Engineering College, Liaoning Institute of Technology, Jinzhou 121001, China puter Science & Engineering College, Liaoning Institute of Technology, Jinzhou 121001, China)Key words: asynchronous motor; soft starting; simulation; SimulinkAbstract: By using soft starting , the starting voltage and starting current of asynchronous motor can be controlled, the impact on electric power system and load during the startup can be reduced, and also enables asynchronous motor to rotate steadily. The simulation model of soft starting system by using PI current closed loop control for asynchronous motor was established based on MATLAB/Simulink and simulation was carried out through actual example. The simulation results were close to the experimental ones, which verified the correctness and validity of the simulation method.近年来,随着电力电子技术和计算机控制技术的飞速发展,国内外都十分重视三相异步电动机软起动控制系统的研究和开发[1,2]。
软起动控制旨在降压以限制电机起动电流,减小起动电流对电网的冲击,也达到了节能的目的。
目前软起动方式很多,如液阻软起动、磁控软起动、晶闸管软起动等,从起动时间、控制方式的节能效果等多方面综合比较,以晶闸管软起动方式最优,代表着软起动的发展方向。
但目前关于异步电动机软起动控制系统仿真的文献较少,本文借助于MATLAB 软件的动态仿真工具Simulink 来构建异步电动机软起动控制系统的仿真模型并进行了实例仿真,建模过程简便直观,仿真过程中通过改变参数可随时观察系统的动态变化情况,最后进行了实验验证。
1 异步电动机软起动控制系统结构三相异步电动机软起动的主电路如图1所示。
该系统将三组反并联的晶闸管串接在电动机的三相电路上,在电动机起动过程中通过控制晶闸管触发角的大小,使电动机起动电流根据工作要求所设142 辽宁工学院学报 第26卷定的规律变化,这样便可任意调整与选择起动电流的大小和起动方式,使电动机处于最佳状态,同时亦可减少起动功率损耗。
图1 晶闸管调压主电路 图2 软起动控制系统的结构框图 目前的软起动器大都以起动电流为控制对象进行软起动,其首要任务是限制起动电流,故对电流采用闭环控制。
图2所示为采用PI 电流闭环控制的软起动控制系统的结构框图,电流反馈量取自相电流有效值,和限定电流的给定值作比较,经比例积分(PI)运算得到调整后的触发角去触发晶闸管导通以实现电动机按预定的规律软起动。
2控制系统的建模软起动有恒流软起动、斜坡恒流软起动、脉冲恒流软起动等多种方式。
因电机处于空载和轻载起动的情况较常见,该起动方式宜采用斜坡恒流软起动,下面便以这种方式为例阐述其建模和仿真过程。
利用MATLAB 中的Simulink 工具建立的异步电动机软起动控制系统仿真模型如图3所示,包括中晶闸管触发器、双向晶闸管、相电流有效值计算模块、软起动触发角PI 调节器为封装好的子系统模块,可从Simulink 常用模块库(simulink)和电力系统模块库(power systems blockset)中获得[3]。
图3 异步电动机软起动控制系统仿真模型图4为双向晶闸管子系统模块,以A 相为例,包含两个反向并联的单向晶闸管。
晶闸管触发极输入的信号如非零,则其导通。
B 、C 两相的双向晶闸管子系统结构与A 相相同。
图4 A 相双向晶闸管子系统模型图5为晶闸管触发器子系统模型,包括重复序列、脉冲发生器、传递延迟器和选择开关等模块。
重复序列模块产生一个周期为0.02 s ,输出从0到2的斜坡信号。
脉冲发生器产生频率为50 Hz ,占空比为50%,幅值为1的脉冲,与重复序列模块产生的斜坡信号相乘后将生成一个0~0.01 s 内输出为从0~1的斜坡信号,而在0.01~0.02 s 内为零。
该信号与触发角给定信号大小18/α相乘后产生一个0~0.01 s 内输出为从0到18/α的斜坡信号,α为晶闸管触发角。
此信号作为选择开关(swith)的第二输入信号便可控制晶闸管的触发时刻。
选择开关的门槛值都设为0.1,当第二个输入信号大于或等于门槛值时,选择开关将第一个输入值1作为输出,使晶闸管在α角处被触发导通。
否则输出第三个输入值0,晶闸管关断。
子系统中采用传递延迟器模拟第3期 耿大勇等:基于SIMULINK 异步电动机软起动控制系统的仿真 143时间延迟。
传递延迟器1的时间延迟系数设为0.01 s ,表示输出2信号比输出1信号延迟180°,保证A 相的两个晶闸管在上、下半波内对称导通。
传递延迟器2的时间延迟系数设为(1/150)s ,表示输出3的信号比输出1的信号延迟了120°,保证T 1、T 3两管的触发脉冲相差120°. 同样,其他传递延迟器的延迟系数也均按晶闸管的导通顺序和规律进行设置。
图5 晶闸管触发器子系统模型从电力系统模块库中拖出异步电动机模块,双击并输入电机的一些主要参数,如额定功率、额定线电压、电源频率、定子和转子的电阻、漏感和互感等,即可使用。
利用测量板可输出电机一些主要物理量的仿真结果,如转速、电磁转矩等。
图2所示系统结构中闭环控制的电流反馈量I back 取自相电流i 的有效值,按定义其计算式为back I =(1) 其中T 为i 的周期。
据式(1)所建立的相电流有效值计算子系统模型如图6所示。
经过电流测量仪测出的相电流作为该系统的输入,输出相电流有效值。
图6 A 相电流有效值计算子系统模型斜坡恒流软起动是控制起动电流以一定的速率平稳地增加,当起动电流增大到所设定的电流限定值I lim 时,就将起动电流保持恒定直至起动结束。
起动电流上升变化率和电流限定值都可任意设定,I lim 大小决定起动时间的长短,可根据负载情况和生产要求设定。
为了达到上述要求,对晶闸管触发角的给定可采用比例积分(PI)控制。
图7为软起动触发角PI 调节器子系统仿真模型。
电流反馈量I back 送入该模块经比例积分运算求出当前晶闸管触发角大小后去触发晶闸管导通以实现电动机斜坡恒流软起动。
输出的晶闸管触发角计算公式为t I I k I I k ti p d )()(0lim back lim back 0∫−+−+=αα(2)式中:α为当前输出的晶闸管触发角;α0为初始给定的晶闸管触发角;k p 为比例常数;k i 为积分常数;I lim 为起动电流限定值;I back 为起动电流反馈值。
图7 触发角PI 调节器子系统模型整个起动过程中,当起动电流增加但小于限定值时,减小晶闸管触发角,电机端电压逐步升高。
起动电流等于限定值时,电机端电压保持恒定。
如果起动电流大于限定电流,则增加晶闸管触发角,以减小电机端电压以进一步限流。
当起动电流小于限定值且减小时,端电压逐步升高到额定值。
3 仿真实例以一台实际的异步电动机为例进行了仿真,电机参数如下:额定功率5.5 kW ,线电压380 V ,额定电流为12.6 A.定子电阻R 1=2.65 Ω,转子折算电阻R’2=1.8 Ω,铁耗等效电阻R m =5.372 Ω,定、转子互感Lm=0.32 H ,定、转子漏电感L 1σ=L’2σ=0.0353 H.转动惯量J=0.044 9 kg·m 2,极对数p=3. 触发角PI 调节器模型中设限定电流为2倍的额定电流左右,取为25 A ,积分常数k i 取为0.004,比例常数k p 取0.001,给定初始触发角α0为100°,电机负载率为20%额定负载。
模型建立好后,设置仿真参数:对此模型的解法选择变步长ode15s 法(可变阶次的数值微分公式算法,属于多步阶法),其他值采用缺省参数,这样就可进行仿真。
图8显示了用有效值表示的直接起动和软起动过程中的相电流变化情况。
由图可见,直接起动时的瞬时冲击电流很大,这对电机本身、拖动设备及电网都造成冲击。
而软起动时的起动电流以一定的速率平稳地增加,当增大到设定的电流限定值25 A 时,保持恒定直至起动结束,避免了瞬时冲击电流给电机本身、拖动设备及电网带来的不利影响。