工业机器人技术基础甘宏波课后答案
- 格式:docx
- 大小:38.04 KB
- 文档页数:8

工业机器人应用基础智慧树知到课后章节答案2023年下广西工业职业技术学院第一章测试1.在迈向“中国制造2025”进程中,中国制造业重点要解决装备升级以及实现生产自动化。
A:错 B:对答案:错2.以下选项中,哪些属于工业机器人的应用?A:码垛 B:机床上下料 C:视觉分拣 D:在线工件检测答案:码垛;机床上下料;视觉分拣;在线工件检测3.第一代工业机器人为示教再现机器人。
A:对 B:错答案:对4.智能机器人属于工业机器人。
A:对 B:错答案:对5.工业机器人主要由操作机、控制器,以及什么机构组成?A:伺服系统 B:末端执行器等 C:检测传感装置 D:传送带答案:伺服系统;末端执行器等;检测传感装置第二章测试1.M-10IA/2型工业机器人的接口由电气接口和气路接口组成。
A:对 B:错答案:对2.当安全门打开时,机器人的速度倍率被限制在()以下。
A:60% B:40% C:10% D:30% 答案:30%3.以下哪些属于工业机器人直角坐标系?A:用户坐标系 B:手动坐标系 C:工具坐标系D:关节坐标系答案:用户坐标系;手动坐标系;工具坐标系4.机器人能够精确地运动,依靠的是哪个模块?A:示教器B:主板C:6轴伺服放大器D:电机答案:6轴伺服放大器5.EES1、EES11、EES2、EES21为外部急停信号。
A:对 B:错答案:对第三章测试1.机器人仿真软件可以添加自己做的工作台模型。
A:错 B:对答案:对2.仿真软件模拟操作机器人运动时有哪些方法?A:虚拟示教法 B:直接拖动法 C:直接输入法 D:意念移动法答案:虚拟示教法;直接拖动法3.机器人坐标为红色时说明位置已经被锁定。
A:错 B:对答案:对T模式机时,弧度越大说明CNT后面数字越小。
A:错 B:对答案:错5.FINE模式机器人运动到一个点后会走直线运动到另外一个点。
A:对 B:错答案:对第四章测试1.FANUC工业机器人离线编程仿真软件的是()。
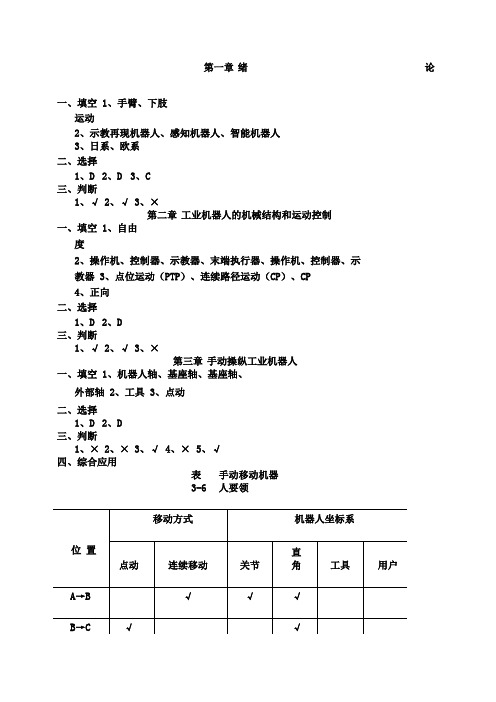
第一章绪论一、填空 1、手臂、下肢运动2、示教再现机器人、感知机器人、智能机器人3、日系、欧系二、选择1、D2、D3、C三、判断1、√2、√3、×第二章工业机器人的机械结构和运动控制一、填空 1、自由度2、操作机、控制器、示教器、末端执行器、操作机、控制器、示教器 3、点位运动(PTP)、连续路径运动(CP)、CP4、正向二、选择1、D2、D三、判断1、√2、√3、×第三章手动操纵工业机器人一、填空 1、机器人轴、基座轴、基座轴、外部轴 2、工具 3、点动二、选择1、D2、D三、判断1、×2、×3、√4、×5、√四、综合应用表3-6 手动移动机器人要领第四章初识工业机器人的作业编程一、填空 1、示教、程序、再现 2、跟踪3、离线编程二、选择1、B2、D3、D三、判断1、√2、√3、×4、×5、√四、综合应用表4-6 直线轨迹作业示教一、填空 1、龙门式搬运机器人、悬臂式搬运机器人、侧壁式搬运机器人、摆臂式搬运机器人 2、吸附式、夹钳式、仿人式 3、机器人控制柜、示教器、气体发生装置、气吸附手爪二、选择1、D2、D三、判断1、√2、√3、√四、综合应用略第六章码垛机器人的作业编程一、填空 1、龙门式码垛机器人、摆臂式码垛机器人 2、吸附式、夹板式、抓取式、组合式 3、操作机、机器人控制柜、示教器、真空发生装置、气体发生装置 4、一进一出、一进两出、两进两出二、选择1、A2、A三、判断1、×2、×3、√四、综合应用略第七章焊接机器人的作业编程一、填空 1、关节式 2、C型、伺服3、弧焊、示教器、焊枪、操作机、弧焊电源4、双、双、H 二、选择1、B2、D3、D三、判断1、√2、√3、√四、综合应用(1)表 7-13 圆弧轨迹作业示教第八章喷涂机器人的作业编程一、填空1、 5~6、手臂、2~32、球型手腕、非球型手腕、非球型手腕3、喷房、操作机、安全围栏、机器人控制器二、选择1、D2、C3、D三、判断1、×2、×3、√表 5-13 汽车顶盖轨迹作业示教一、填空 1、直角式、关节式2、吸附式、夹钳式、组合式3、操作机、控制系统、装配系统、传感系统二、选择1、C2、D三、判断1、×2、×3、√略。
0.1 简述工业机器人的定义,说明机器人的主要特征。
答:机器人是一种用于移动各种材料、零件、工具、或专用装置,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。
1.机器人的动作结构具有类似于人或其他生物体某些器官(肢体、感官等)的功能。
2.机器人具有通用性,工作种类多样,动作程序灵活易变。
3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4.机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
0.2工业机器人与数控机床有什么区别?答:1.机器人的运动为开式运动链而数控机床为闭式运动链;2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统;3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。
4.机器人灵活性好,数控机床灵活性差。
0.5简述下面几个术语的含义:自有度、重复定位精度、工作范围、工作速度、承载能力。
答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。
重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率,是重复同一位置的范围,可以用各次不同位置平均值的偏差来表示。
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为手臂末端最大的合成速度(通常在技术参数中加以说明)。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
0.6什么叫冗余自由度机器人?答:从运动学的观点看,完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
0.7题0.7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0゜≤θ1≤180゜,-90゜≤θ2≤180゜,画出该机械手的工作范围(画图时可以设L2=3cm)。
1.1 点矢量v 为]00.3000.2000.10[T ,相对参考系作如下齐次坐标变换:A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。

2. 机器人发展的三个阶段:①示教再现机器人第一代工业机器人是示教再现型。
这类机器人能够按照人类预先示教的轨迹、行为、顺序和速度重复作业。
②感知机器人第二代工业机器人具有环境感知装置,能在一定程度上适应环境的变化。
③智能机器人第三代工业机器人称为智能机器人,具有发现问题,并且能自主的解决问题的能力,尚处于实验研究阶段。
作为发展目标,这类机器人具有多种传感器,不仅可以感知自身的状态,比如所处的位置、自身的故障状况等,而且能够感知外部环境的状态,比如自动发现路况、测出协作机器的相对位置、相互作用的力等。
更为重要的是,能够根据获得的信息,进行逻辑推理、决策判断,在变化的内部状态与变化的外部环境中,自主决定自身的行为。
这类机器人具有高度的适应性和自治能力。
6.SCARA机器人,即Selective Compliance AssemblyRobot Arm,又名水平多关节机器人,是工业机器人应用非常广泛的构型。
SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。
另一个关节是移动关节,用于完成末端件在垂直于平面的运动。
SCARA机器人的特点是负载小、速度快,主要应用在快速分拣、精密装配等3C行业、食品行业等领域。
3.3.液压伺服系统主要由液压源、驱动器、伺服阀、传感器、控制器等组成。
液压传动的特点是转矩与惯量比大,不需要其他动力就能连续维持力。
6.Delta机器人可分为回转驱动型和直线驱动型。
回转驱动型Delta机器人,控制容易、动态特性好,但其作业空间较小、承载能力较低,故多用于高速、轻载的场合。
直线驱动型Delta机器人作业空间大、承载能力强,但其操作和控制性能、运动速度等不及旋转型Delta机器人,多用于并联数控机床等场合。
8.RV减速器的特点:①传动比范围大,传动效率高。
②扭转刚度大。
③在额定转矩下,弹性回差误差小。
④传递同样转矩与功率时,RV减速器较其他减速器体积小。
1. 机器人传感器有多种分类方法,如接触式传感器或非接触式传感器,内传感器或外传感器等。

第1章一、填空题1、按坐标形式分类,机器人可分为、、球面坐标型和四种基本类型。
2、作为一个机器人,一般由三个部分组成,分别是、和。
3、机器人主要技术参数一般有、、、重复定位精度、、最大工作速度和承载能力等。
4、自由度是指机器人所具有的的数目,不包括的开合自由度。
5、机器人分辨率分为和,统称为。
6、重复定位精度是关于的统计数据。
二、选择题1、工作范围是指机器人()或手腕中心所能到达的点的集合。
A 机械手B 手臂末端C 手臂D 行走部分。
2、机器人的精度主要依存于()、控制算法误差与分辨率系统误差。
A传动误差 B 关节间隙C机械误差 D 连杆机构的挠性3、当代机器人大军中最主要的机器人为:()A 工业机器人B 军用机器人C 服务机器人D 特种机器人4、下面哪个国家被称为“机器人王国”?()A 中国B 英国C 日本D 美国5.机器人的定义中,突出强调的是()。
A具有人的形象B模仿人的功能C像人一样思维D感知能力很强三、判断题(对划“√”,错划“×”)1、机械手亦可称之为机器人。
Y ()2、关节型机器人主要由立柱、前臂和后臂组成。
()3、到目前为止,机器人已发展到第四代。
()4、完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
()5、关节空间是由全部关节参数构成的。
()四、简答题1、简述工业机器人的定义及特点。
2、简述工业机器人的基本组成。
3、工业机器人按坐标形式可以分为几类?每一类有什么特点?4、工业机器人的主要技术参数有哪些?5、什么叫冗余自由度机器人?6、工业机器人按控制方式怎样分类?7、简述机器人的主要应用场合及其特点?8、未来机器人技术将向哪些方向发展?答案:一、填空题1. 直角坐标机器人、柱面坐标机器人、多关节型机器人2.机器人本体、控制器与控制系统、示教器3. 自由度、定位精度、分辨率、工作范围4.所具有的独立坐标轴运动的数目末端执行器的开合自由度5.编程分辨率控制分辨率分辨率6. 指对同一指令位置从同一方向重复响应n次后实到位置的一致程度二、选择题1-5 BCACC三、判断题1-5 √√×√√四、简答题1.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。

工业机器人技术基础智慧树知到课后章节答案2023年下兰州石化职业技术大学兰州石化职业技术大学第一章测试1.按功能和用途分类,工业机器人大致可分为()4大类。
答案:装配;搬运;加工;包装2.加工机器人是直接用于工业产品加工作业的工业机器人,包括()以及冲压、折弯、抛光等加工作业。
答案:雕刻;焊接;研磨3.机器人三原则是由()提出的。
答案:阿西莫夫4.工业机器人之父是()。
答案:约瑟夫·英格伯格5.世界第一台工业机器人是()年研制成功的。
答案:19596.从机器人技术发展水平看,智能机器人是()机器人。
答案:第三代7.日本本田公司研制的ASIMO机器人,是一款()。
答案:仿人机器人8.目前世界工业界装机最多的工业机器人是()。
答案:多关节机器人9.下列机器人属于工业机器人的是()。
答案:分拣机器人10.()年,我国第一台示教再现工业机器人样机由中国科学院沈阳自动化研究所研制成功。
答案:198211.()机器人采用了一种闭环机构,多用于食品、药品、3C、电子等轻工业的装配和搬运。
答案:并联12.根据国际机器人联合会的分类,机器人可分为工业机器人和服务机器人2类。
()答案:对13.目前,工业机器人在全球市场上应用最广的行业是汽车行业。
()答案:对第二章测试1.工业机器人的手部按照结构和用途,可分为()大类。
答案:夹持类;专用类;吸附类2.夹持式末端执行器根据手指开合的动作特点,又可分为()两种。
答案:回转型;平移型3.吸附式取料手靠吸附力取料,根据吸附力的不同,分为()等两种。
答案:磁吸附;气吸附4.机器人是一种()很强的自动化设备,可根据作业要求完成各种动作,这些专用工具可通过电磁吸盘式换接器快速地进行更换,从而满足用户的不同加工需求。
答案:通用性5.也就是说腕部的运动形式分为()。
答案:臂转;手转;腕摆6.按照手臂的结构形式区分,手臂有()。
答案:单臂式;双臂式;悬挂式7.立柱式机器人多采用回转型、俯仰型或屈伸型的运动形式,是一种常见的配置形式。
0.2工业机器人与数控机床有什么区别?答:1.机器人的运动为开式运动链而数控机床为闭式运动链;2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统;3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。
4.机器人灵活性好,数控机床灵活性差。
0.7题0.7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0゜≤θ1≤180゜,-90゜≤θ2≤180゜,画出该机械手的工作范围(画图时可以设L2=3cm )。
1.1 点矢量v 为]00.3000.2000.10[T,相对参考系作如下齐次坐标变换:A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。
解:v ,=Av=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡100.3000.2000.10=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡13932.1966.9 属于复合变换:旋转算子Rot (Z ,30)=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-1000010000866.05.0005.0866.0 平移算子Trans (11.0,-3.0,9.0)=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-10000.91000.30100.110011.2 有一旋转变换,先绕固定坐标系Z 0 轴转45,再绕其X 0轴转30,最后绕其Y 0轴转60,试求该齐次坐标变换矩阵。
解:齐次坐标变换矩阵R=Rot(Y ,60)Rot (X ,30)Rot(Z ,45)=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-1000010000707.0707.000707.0707.010000866.05.0005.0866.000001100005.00866.000100866.005.0=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----10000433.0436.0436.005.0612.0612.00750.0047.0660.0 1.3 坐标系{B}起初与固定坐标系{O}相重合,现坐标系{B}绕Z B 旋转30,然后绕旋转后的动坐标系的X B 轴旋转45,试写出该坐标系{B}的起始矩阵表达式和最后矩阵表达式。
0.1 简述工业机器人的定义,说明机器人的主要特征。
答:机器人是一种用于移动各种材料、零件、工具、或专用装置,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。
1.机器人的动作结构具有类似于人或其他生物体某些器官(肢体、感官等)的功能。
2.机器人具有通用性,工作种类多样,动作程序灵活易变。
3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4.机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
0.2工业机器人与数控机床有什么区别?答:1.机器人的运动为开式运动链而数控机床为闭式运动链;2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统;3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。
4.机器人灵活性好,数控机床灵活性差。
0.5简述下面几个术语的含义:自有度、重复定位精度、工作范围、工作速度、承载能力。
答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。
重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率,是重复同一位置的范围,可以用各次不同位置平均值的偏差来表示。
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为手臂末端最大的合成速度(通常在技术参数中加以说明)。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
0.6什么叫冗余自由度机器人?答:从运动学的观点看,完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
0.7题0.7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0゜≤θ1≤180゜,-90゜≤θ2≤180゜,画出该机械手的工作范围(画图时可以设L2=3cm)。
1.1 点矢量v 为]00.3000.2000.10[T ,相对参考系作如下齐次坐标变换:A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。
0.1 简述工业机器人的定义,说明机器人的主要特征。
答:机器人是一种用于移动各种材料、零件、工具、或专用装置,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。
1.机器人的动作结构具有类似于人或其他生物体某些器官(肢体、感官等)的功能。
2.机器人具有通用性,工作种类多样,动作程序灵活易变。
3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4.机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
0.2工业机器人与数控机床有什么区别?答:1.机器人的运动为开式运动链而数控机床为闭式运动链;2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统;3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。
4.机器人灵活性好,数控机床灵活性差。
0.5简述下面几个术语的含义:自有度、重复定位精度、工作范围、工作速度、承载能力。
答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。
重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率,是重复同一位置的范围,可以用各次不同位置平均值的偏差来表示。
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为手臂末端最大的合成速度(通常在技术参数中加以说明)。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
0.6什么叫冗余自由度机器人?答:从运动学的观点看,完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
0.7题0.7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0゜≤θ1≤180゜,-90゜≤θ2≤180゜,画出该机械手的工作范围(画图时可以设L2=3cm)。
1.1 点矢量v 为]00.3000.2000.10[T ,相对参考系作如下齐次坐标变换:A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。
工业机器人习题库与参考答案一、判断题(共100题,每题1分,共100分)1.()示教器编程用于示教——再现型机器人A、正确B、错误正确答案:A2.防护等级后面有两位数字,第二位代表的含义是固体的防护等级A、正确B、错误正确答案:B3.()机器手臂可以被称为工业机器人A、正确B、错误正确答案:A4.()霍尔元件的电流传感器因其价格低体积小频率特性好,所以这种电流传感器在实践中得到了广泛应用。
A、正确B、错误正确答案:A5.差动连接可提高执行元件的运动速度。
()A、正确B、错误正确答案:A6.电压互感器一次侧须有熔断器保护,二次侧不允许开路。
()A、正确B、错误正确答案:B7.机器视觉系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三维世界的识别。
()A、正确B、错误正确答案:A8.机器人机座可分为固定式和履带式两种。
()A、正确B、错误正确答案:B9.笼型转子交流伺服电动机具有励磁电流较小、体积较小、机械强度高等特点。
()A、正确B、错误正确答案:A10.回放模式下,释放或用力握紧手持操作示教器背面的【三段开关】,这时手持操作示教器上的【伺服准备指示灯】熄灭,表示伺服电源切断。
()A、正确B、错误正确答案:B11.机器人的自由度数大于关节数目。
()A、正确B、错误正确答案:B12.使机械臂沿直线移动的指令是MoveAbsJ。
()A、正确B、错误正确答案:B13.工业机器人按照自由度分类,可分为一、二、三、四、五、六和冗余自由度机器人。
()A、正确B、错误正确答案:B14.机器人控制理论可以照搬经典控制理论与现代控制理论使用。
A、正确B、错误正确答案:B15.工业机器人手动操作时,示教使能器要一直按住。
()A、正确B、错误正确答案:A16.关节i的坐标系放在i-1关节的末端。
()A、正确B、错误正确答案:B17.()灵活性低的工业机器人,其外围设备较为复杂。
A、正确B、错误正确答案:A18.安装保险丝时,应做到:固定熔丝的螺钉不要拧得过紧或过松,以接触良好又不损伤熔丝为佳。
工业机器人技术基础甘宏波课后答案
1、当代机器人大军中最主要的机器人为()。
A、工业机器人
B、军用机器人
C、服务机器人
D、特种机器人
答案:A
1、以下哪个选项是“制动闸释放按钮”安全标识的含义
A、A。
可能造成人员挤压伤害风险
B、B。
对于大型工业机器人,点击对应关节轴的制动闸释放按钮,对
应的电机抱闸会打工
C、C。
起到定位作用或限位作用
D、D。
一个紧固件,其主要作用是起吊工业机器人
答案:对于大型工业机器人,点击对应关节轴的制动闸释放按钮,对
应的电机抱闸会打开
2、任何了解工业机器人的人员都可以安装、维护、操作工业机器人。
A:正确B:错误
答案:错误
3、安装、维护、操作工业机器人时操作人员必须有意识地对自身安
全进行保护,必须主动穿戴安全帽、安全工作服、安全鞋。
答案:√
1、下面哪个是与人身及工业机器人安全直接相关的安全知识
A、危险:警告,如果不依照说明操作,就会发生事故,并导致严重
或致命的人员伤害和严重的产品损坏。
B、警告:警告如果不依照说明操作,可能会发生事故,造成严重的
伤害(可能致命)或重大的产品损坏。
C、电击:针对可能会导致严重的人身伤害或死亡的电气危险的警告。
D、小心:警告如果不依照说明操作,可能会发生能造成伤害或产品
损坏的事故。
答案:危险:警告,如果不依照说明操作,就会发生事故,并导致严
重或致命的人员伤害和严重的产品损坏。
;警告:警告如果不依照说明操作,可能会发生事故,造成严重的伤害(可能致命)或重大的产品损坏。
;电击:针对可能会导致严重的人身伤害或死亡的电气危险的警告。
;小心:警告如果不依照说明操作,可能会发生能造成伤害或产品损坏的事故。
2、任何了解工业机器人的人员都可以安装、维护、操作工业机器人。
A:正确B:错误
答案:错误
3、安装、维护、操作工业机器人时操作人员必须有意识地对自身安
全进行保护,必须主动穿戴安全帽、安全工作服、安全鞋。
答案:√
1、当代机器人大军中最主要的机器人为
A、工业机器人
B、军用机器人
C、服务机器人
D、特种机器人
答案:A
2、以下哪个选项是“制动闸释放按钮”安全标识的含义
A、可能造成人员挤压伤害风险
B、对于大型工业机器人,点击对应关节轴的制动闸释放按钮,对应的电机抱闸会打开
C、起到定位作用或限位作用
D、一个紧固件,其主要作用是起吊工业机器人
答案:对于大型工业机器人,点击对应关节轴的制动闸释放按钮,对应的电机抱闸会打开
3、下面哪个是与人身及工业机器人安全直接相关的安全知识?
A、危险:警告,如果不依照说明操作,就会发生事故,并导致严重或致命的人员伤害和严重的产品损坏。
B、警告:警告如果不依照说明操作,可能会发生事故,造成严重的伤害(可能致命)或重大的产品损坏。
C、电击:针对可能会导致严重的人身伤害或死亡的电气危险的警告。
D、小心:警告如果不依照说明操作,可能会发生能造成伤害或产品
损坏的事故。
答案:危险:警告,如果不依照说明操作,就会发生事故,并导致严
重或致命的人员伤害和严重的产品损坏。
;警告:警告如果不依照说明操作,可能会发生事故,造成严重的伤害(可能致命)或重大的产品损坏。
;电击:针对可能会导致严重的人身伤害或死亡的电气危险的警告。
;小心:警告如果不依照说明操作,可能会发生能造成伤害或产品损坏的事故。
4、任何了解工业机器人的人员都可以安装、维护、操作工业机器人。
A:正确B:错误
答案:错误
5、安装、维护、操作工业机器人时操作人员必须有意识地对自身安
全进行保护,必须主动穿戴安全帽、安全工作服、安全鞋。
答案:√
1、课后完成以下内容
答案:A、风量调节;
B、超过70℃可以自动关闭;
平时一般是常开风口;
具有电信号关闭和阀体手动关闭功能;
根据系统需要,可以具备在消防控制室显示启闭状态的功能。
1、()主要用于拆装需要使用一字螺丝和十字螺丝的小型电气部件。
A、带球头的T型内六角扳手
B、橡胶锤
C、斜口钳
D、小型螺丝刀套装
答案:小型螺丝刀套装
2、以下哪些工具属于测量工具()
A、音波式数字显示张力计
B、数字式万用表
C、手持弹簧秤
D、内六角扳手
答案:音波式数字显示张力计;数字式万用表;手持弹簧秤
3、在进行工业机器人拆包的过程中可以不用佩戴纯棉手套
答案:错误
1、安装单元可以实现异形芯片的存储、装配和模拟检测过程。
答案:
2、投影可以分为中心投影、斜投影和正投影。
A:正确B:错误
答案:正确
3、气压传动的工作原理是利用()把电动机或其它原动机输出的机械能转换为空气的压力能。
答案:空压机
1、()是工业机器人的控制中心。
答案:雇佣工人的剩余劳动
2、在安装工业机器人本体时需使用()吊升机器人,在机器人表面与圆形吊带直接接触的地方,垫放厚布。
答案:正确
3、通过机器人(),机器人可自动更换不同的末端执行器或外围设备。
答案:正确
1、可以通过按压控制夹爪工具动作对应气路电磁阀上的手动调试按钮,测试夹爪工具的闭合和张开,验证气路连接的正确性。
答案:
2、可以通过按压控制工业机器人工具快换动作的电磁阀上的手动调试按钮,使工具快换装置主端塞下移,钢珠伸出。
答案:正确
3、安装夹爪工具时,需要对准快换装置主端口和末端工具上的()型凹槽。
答案:U
1、()主要用于拆装需要使用一字螺丝和十字螺丝的小型电气部件。
A、带球头的T型内六角扳手
B、橡胶锤
C、斜口钳
D、小型螺丝刀套装
答案:小型螺丝刀套装
2、以下哪些工具属于测量工具()。
A、音波式数字显示张力计
B、数字式万用表
C、手持弹簧秤
D、内六角扳手
答案:音波式数字显示张力计;数字式万用表;手持弹簧秤
3、投影可以分为中心投影、斜投影和正投影。
A:正确B:错误
答案:正确
4、气压传动的工作原理是利用()把电动机或其它原动机输出的机
械能转换为空气的压力能。
答案:空压机
5、安装夹爪工具时,需要对准快换装置主端口和末端工具上的()型凹槽。
答案:U。