任务1 工业机器人手动操作基础知识
- 格式:ppt
- 大小:6.85 MB
- 文档页数:54

工业机器人操作指南工业机器人作为现代工业生产中的重要设备,已经被广泛应用于各个行业。
为了正确高效地操作工业机器人,本文将从机器人的基本操作流程、安全注意事项和故障排除等方面进行详细介绍。
一、基本操作流程1. 准备工作在使用工业机器人前,需要确认机器人周围的安全环境是否符合要求,检查机器人及其周边设备是否正常运行。
同时,需要保证操作者具备相关的机器人操作培训和技能。
2. 启动机器人按照机器人的启动步骤,将机器人的电源连接并打开,然后按照控制界面或操作面板上的指示进行启动操作。
在启动过程中,需要仔细观察机器人是否有异常声音或震动,确保机器人能够正常运行。
3. 选择操作模式根据实际需求,选择适当的机器人操作模式。
常见的操作模式包括手动操作模式、自动操作模式和示教操作模式。
手动操作模式适用于维护和调试工作,自动操作模式适用于大批量生产,示教操作模式适用于新任务的录制和编程。
4. 进行操作任务根据需要,选择合适的操作任务,包括但不限于抓取、放置、装配和焊接等任务。
在进行操作任务时,需要保证机器人的姿态和速度等参数设置正确,并严格按照安全规程进行操作。
5. 完成任务并停止机器人当完成操作任务后,需要停止机器人的运行。
按照相应步骤,将机器人的电源关闭,并确保机器人及其周边环境的安全。
二、安全注意事项1. 个人安全操作者在操作机器人时,应穿戴符合要求的个人防护装备,如安全帽、防护服、安全鞋等,避免发生意外伤害。
2. 机器人周边安全在机器人操作过程中,需要确保机器人周边的区域干净整洁,避免杂物堆积或放置在机器人操作范围内。
同时,需要设置相应的安全防护设施,如护栏、警示标志等,确保工作区域的安全。
3. 紧急停机在出现紧急情况时,操作者需要立即执行紧急停机动作,切断机器人的电源,并进行相应的处理措施。
操作者需要熟悉紧急停机程序,并在必要时进行紧急演练。
4. 操作规程操作者在操作机器人时,需要按照相应的操作规程进行操作。
KUKA机器人基本手动操作一、操作前的准备在进行KUKA机器人的基本手动操作之前,首先需要确保机器人处于安全的状态。
这包括确保机器人的电源已关闭,以及所有的移动部件都处于安全的位置。
为了保护机器人免受损坏,绝对不要在手动操作时使用超过机器人规格的外部工具或附件。
二、启动机器人在接通电源并确保所有安全保护装置都正常工作后,可以启动机器人。
通常,这只需要在控制面板上按下“启动”按钮。
在启动过程中,如果机器人发出任何异常声音或显示异常信息,应立即停止启动并检查是否存在问题。
三、手动控制机器人在机器人启动后,可以通过控制面板或者示教器进行手动控制。
控制面板通常包括各种按钮和开关,可以用来控制机器人的移动、速度、旋转等。
示教器则是一种更高级的控制设备,可以用来精确地控制机器人的运动轨迹。
在进行手动操作时,应始终保持对机器人的完全控制,避免任何可能导致碰撞或损坏的操作。
如果机器人遇到任何异常情况或故障,应立即停止操作并寻求专业帮助。
四、安全注意事项在进行任何手动操作时,安全始终是第一位的。
因此,必须严格遵守所有相关的安全规定和操作指南。
这包括但不限于定期检查和维护机器人的各个部件,始终保持机器人在大家的视线范围内,以及在任何情况下都不要试图超出机器人的能力范围。
KUKA机器人的基本手动操作虽然需要一定的技能和经验,但只要遵守了相关的安全规定和操作指南,就可以安全、有效地控制机器人。
在工业自动化的世界中,ABB机器人无疑是最为引人注目的存在。
作为全球领先的机器人技术提供商,ABB机器人在各种行业和领域中都得到了广泛的应用。
而今天,我们将聚焦于ABB机器人的手动操作,探索这一技术如何赋予人类更强大的能力。
我们需要理解ABB机器人的基本构成和操作原理。
ABB机器人是一种具有高度灵活性和适应性的自动化机器,它们通过复杂的算法和感应系统来执行任务。
在手动操作时,我们主要是通过控制器和示教器来对机器人进行编程和操作。
手动操作ABB机器人需要一定的技巧和经验。

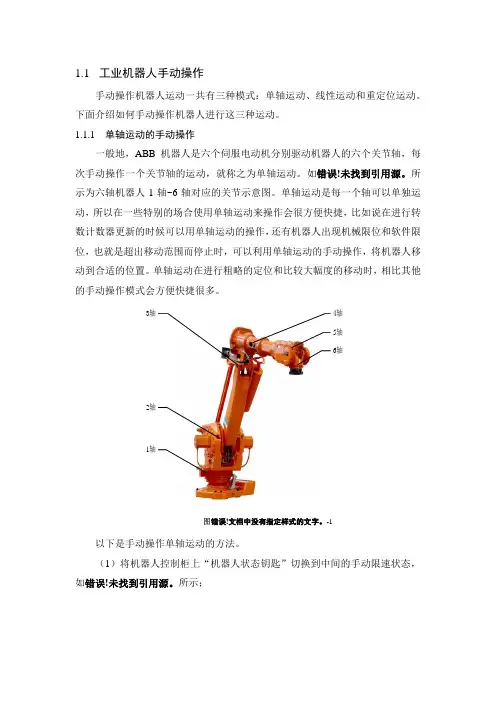
1.工业机器人的运动2. 工业机器人的6个自由度的介绍3.示教器(1)示教器介绍(2)手动操纵界面A:手动操纵设置窗口B:机器人位置显示窗口C:摇杆方向提示窗口(3)基本操作——点动点动机器人就是点按\微动【轴操作键】来移动机器人手臂的方式。
每点按或微动【轴操作键】一次机器人移动一段距离。
点动机器人主要用在示教时离目标位置较近的场合或初期操作中用户。
(3)基本操作——连续移动连续移动机器人则是长按/拨动【轴操作键】来移动机器人手臂的方式。
连续移动机器人主要用在示教时离目标位置较远的场合。
(3)基本操作——运动方式ABB机器人具有线性运动、重定位运动和关节(单轴)运动3种运动方式。
(1)关节(单轴)运动通过摇杆控制机器人单轴运动。
(2)线性运动大多数情况下,选择从点移动到点时,机器人的运行轨迹为直线,所以称为直线运动,也称为线性运动。
其特点是焊枪(或工件)姿态保持不变,只是位置改变。
(3)重定位运动重定位运动方式是工件姿态改变,而位置保持不变。
典型运动的适应场合分析1.关节(单轴)运动关节运动经常用在机器人双工位操作,主要实现点位运动。
其关键操作步骤是:系统上电开机→A工位机器人手动示教→选择关节运动(点到点运动模式)→移动机器人到B工位/旋转回转机→B工位机器人手动示教。
2.线性运动线性运动常在实际作业示教或手动操作实现直线轨迹运动时常用。
例:机器人作业运动轨迹示教完毕后,为防止末端工具与工件、夹具等发生碰撞,通常需要将末端工具保持作业姿态而离开作业结束点,类似这种不改变工具姿态的操作均可选择在工具坐标系线性运动下操作。
关键操作步骤:系统上电开机→选择关节运动→变换末端工具姿态至作业姿态→选择线性运动→移动机器人至直线轨迹的开始点→选择直角坐标系的Y轴→移动机器人至直线轨迹的结束点。
3.重定位运动机器人作业运动轨迹示教时,为防止末端工具与工件、夹具等发生碰撞,通常需要改变末端工具的作业姿态,类似这种改变工具姿态的操作均可选择在工具坐标系重定位运动下操作。


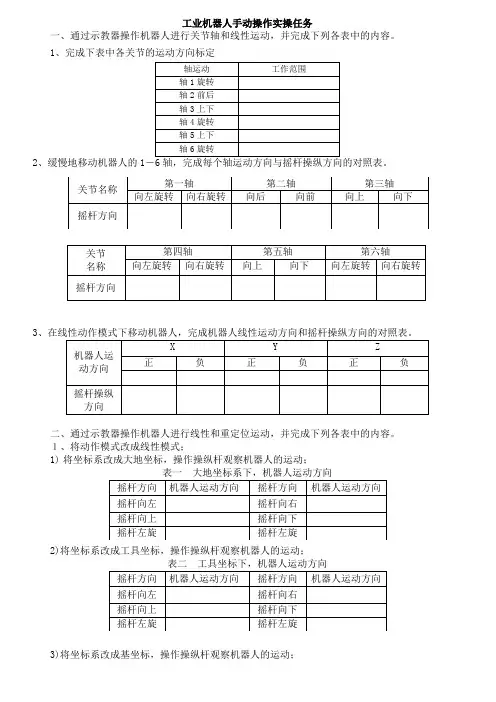
工业机器人手动操作实操任务
一、通过示教器操作机器人进行关节轴和线性运动,并完成下列各表中的内容。
1、完成下表中各关节的运动方向标定
2、缓慢地移动机器人的1
3
二、通过示教器操作机器人进行线性和重定位运动,并完成下列各表中的内容。
1、将动作模式改成线性模式;
1)将坐标系改成大地坐标,操作操纵杆观察机器人的运动;
2)将坐标系改成工具坐标,操作操纵杆观察机器人的运动;
3)将坐标系改成基坐标,操作操纵杆观察机器人的运动;
4)将坐标系改成工件坐标,操作操纵杆观察机器人的运动;
2、将动作模式改成重定位模式;
2)将坐标系改成大地坐标,操作操纵杆观察机器人的运动;
2)将坐标系改成工具坐标,操作操纵杆观察机器人的运动;。