转子平衡、临界转速与强度
- 格式:ppt
- 大小:2.99 MB
- 文档页数:53
航空发动机构造及强度复习题(参考答案)一、基本概念1.转子叶片的弯矩补偿适当地设计叶片各截面重心的连线,即改变离心力弯矩,使其与气体力弯矩方向相反,互相抵消,使合成弯矩适当减小,甚至为零,称为弯矩补偿。
2.罩量通常将叶片各截面的重心相对于 z 轴作适当的偏移,以达到弯矩补偿的目的,这个偏移量称为罩量。
3.轮盘的局部安全系数与总安全系数局部安全系数是在轮盘工作温度与工作时数下材料的持久强度极限T t,与计算轮盘应力中最大周向应力或径向应力之比值。
K T t / max 1.5 ~ 2.0 总安全系数是由轮盘在工作条件下达到破裂或变形达到不允许的程度时的转速n c ,与工作的最大转速 n m ax之比值。
K d n c/n max4.轮盘的破裂转速随着转速的提高,轮盘负荷不断增加,在高应力区首先产生塑性变形并逐渐扩大,使应力趋于均匀,直至整个轮盘都产生塑性变形,并导致轮盘破裂,此时对应的转速称为破裂转速。
5.转子叶片的静频与动频静止着的叶片的自振频率称为静频;旋转着的叶片的自振频率称为动频;由于离心力的作用,叶片弯曲刚度增加,自振频率较静频高。
6.尾流激振气流通过发动机内流道时,在内部障碍物后(如燃烧室后)造成气流周向不均匀,从而对后面转子叶片形成激振。
7.转子的自位作用转子在超临界状态下工作时,其挠度与偏心距是反向的,即轮盘质心位于轴挠曲线的内侧,不平衡离心力相应减小,使轴挠度急剧减小,并逐渐趋于偏心距 e ,称为“自位”作用。
8.静不平衡与静不平衡度由不平衡力引起的不平衡称为静不平衡;静不平衡度是指静不平衡的程度,用质量与偏心矩的乘积 me 表示,常用单位为g cm。
9.动不平衡与动不平衡度由不平衡力矩引起的不平衡称为动不平衡;动不平衡度是指动不平衡的程度,用 me 表示,常用单位是g cm 。
10.动平衡动平衡就是把转子放在动平衡机床上进行旋转,通过在指定位置上添加配重,以消除不平衡力矩。
1 转子临界转速概念转子的固有频率除了与转子结构(和支承结构)参数有关外,它还随转子涡动转速和转子自转转速的变化而变化。
在转子不平衡力驱动下,转子一般作正同步涡动,当转子涡动转速等于转子固有频率时,转子出现共振,相应转速就称为该转子的临界转速。
2 转子临界转速计算对程序的要求计算转子临界转速必须能够考虑旋转结构涡动时产生的陀螺效应对转子临界转速的影响,这是转子临界转速计算同其他非旋转结构固有频率计算的差异所在。
一般有限元程序不具备计算转子临界转速的功能。
3 ANSYS的临界转速计算功能1) 计算转子临界转速可用单元BEAM4;PIPE16。
COBIN14(用于模拟带阻尼的弹性支撑)2) 单元特性及实常数BEAM4和PIPE16:Keyoption(7)=1实常数Spin=转子自转角速度(ω) rad/s。
3) 特征值求解方法选取DAMP方法求解特征值。
4) 计算结果处理采用有限元方法计算转子临界转速时,转子会出现正进动和反进动。
由于陀螺效应的作用,随着转子自转角速度的提高,反进动固有频率将降低,而正进动固有频率将提高。
根据临界转速的定义,应只对正进动固有频率(Ωc)进行分析。
在后处理中首先剔除负固有频率,然后分析各阶模态振型,确定同一阶振型的正进动和反进动固有频率。
改变转子自转角速度(ω),计算出新的Ωc,最后画出Ωc~ω曲线,根据临界转速的定义,当Ωc=ω时,Ωc即所求临界转速。
需注意:由于Ωc的单位为Hz,而ω为rad/s,计算时应转换单位。
4 算例单转子结构如图所示,转子轴近似无质量,轮盘密度8*104Kg/m3,其余材料参数为:E=200Gpa μ=|||----50--------|||_____________________________||d=120^ ^ d0=10||||h=|---------- ------------------------|算例命令流文件如下:/PREP7ET,1,BEAM4!*KEYOPT,1,2,0KEYOPT,1,6,0KEYOPT,1,7,1KEYOPT,1,9,0KEYOPT,1,10,0*SET,p,acos(-1)*SET,R1,5*SET,R2,60R,1,p*R1**2,p*R1**4/4,p*R1**4/4,2*R1,2*R1, , RMORE, ,p*R1**4/2, , ,2175, ,R,2,p*R2**2,p*R2**4/4,p*R2**4/4,2*R2,2*R2, , RMORE, ,p*R2**4/2, , ,2175, ,!*MPTEMP,,,,,,,,MPTEMP,1,0MPDATA,EX,1,,2e5MPDATA,PRXY,1,,.3MPTEMP,,,,,,,,MPTEMP,1,0MPDATA,DENS,1,,1e-10 MPTEMP,,,,,,,,MPTEMP,1,0MPDATA,EX,2,,2E5MPDATA,PRXY,2,,.3 MPTEMP,,,,,,,,MPTEMP,1,0MPDATA,DENS,2,,8E-8K, ,,,,K, ,100,,,TYPE, 1MAT, 1REAL, 1ESYS, 0LSTR, 1, 2LESIZE,ALL, , ,200, ,1, , ,1, LMESH, 1D,1,UXD,1,UYD,1,UZD,102,UYD,102,UZFLST,2,1,2,ORDE,1FITEM,2,200EMODIF,P51X,MAT,2,FLST,2,1,2,ORDE,1FITEM,2,200EMODIF,P51X,REAL,2,FINISH/SOLU!*ANTYPE,2!*MODOPT,DAMP,40EQSLV,FRONTMXPAND,40, , ,0LUMPM,0PSTRES,0!*MODOPT,DAMP,40,10,40000, ,OFF /STATUS,SOLUSOLVEFINISH。
临界转速理论基础一、临界转速定义临界转速就是透平机组转速与透平机转子自振频率相重合时的转速,此时便会引起共振,结果导致机组轴系振动幅度加大,机组振动加剧,长时间在这种临界转速下运转,就会造成破坏事故的发生。
由于转子因材料、制造工艺的误差、受热弯曲等多种因素,转子各微段的质心一般对回转轴线有微小偏离。
转子旋转时,由上述偏离造成的离心力会使转子产生横向振动,在工作过程中不可避免的产生振动现象。
这种振动在某些转速上显得异常强烈,这些转速称为临界转速。
转子的振动幅值(扰度、离心力)将随着转速的升高而增大,当转速继续升高而振动幅值出现下降且稳定在某一振动幅值范围之内,我们称转子系统此时发生了共振现象(批注:转子的振动幅值(扰度、离心力)将随着转速的升高而增大,当转速继续升高而振动幅值出现下降,继续升高下降)。
我们把振动幅值出现极大值时对应的转速称为转子系统的临界转速,这个转速等于转子的固有频率。
当转子速度继续升高,振动幅值再次出现极大值时,该振动幅值对应的转速称为二阶临界转速,以此类推我们可以定义转子的三阶临界转速,四阶临界转速。
但是实际中由于支承刚度、轴系受力等情况,转子临界转速会与定义值有一定的偏差,比如转轴受到拉力时,临界转速会提高;转轴受到压力时,临界转速会下降。
转子的临界转速一般通过求解其振动频率来得到。
转子的固有频率除了与转子结构(和支承结构)参数有关外,它还随转子涡动转速和转子自转转速的变化而变化。
在不平衡力驱动下,转子一般作正向同步涡动,当转子涡动频率等于转子振动频率时,转子出现共振,相应振动频率下的转速就称为该转子的临界转速。
转子的固有频率除了与转子结构(和支承结构)参数有关外,它还随转子涡动转速和转子自转转速的变化而变化。
为确保机器在工作转速范围内不致发生共振,临界转速应适当偏离工作转速10%以上。
临界转速的研究对于旋转机械很重要。
在旋转机械中,由于振动而引起很多故障甚至事故,造成了财力物力的损失。
)()()(z ju z u u y z z +=一、 实验理论依据1、实验意义:机械传动中离不开转子的旋转运动, 转子旋转时,如果其质量中心偏离旋转中心就会产生振动。
机器主轴长期振动会造成磨损,机械加工中,振动会导致被加工工件的质量劣化,由振动而产生的噪声会造成环境污染。
长期以来人们一直致力于降低与消除转子的质量偏心,从而使转子达到动态平衡。
动平衡技术是指旋转机械在与其工作状态相同或相近的转速、安装条件、支承条件和负载情况下,对其进行振动测量或平衡校正的一种平衡方法。
实践证明,50%以上的机械振动可以归结为“不平衡”造成的。
所以,成功地消除或减小转子不平衡是降低机械振动的主要手段。
平衡不仅是技术上的要求,也是经济效益的需要。
随着科学技术的进步、 计算机、新型传感器、智能仪器等新技术的应用,推动了转子动平衡技术的快速发展。
更高的平衡精度, 更便捷的平衡方法是人们追求的目标。
本实验正是通过对一阶临界转速的测量来观察振动带来的危害,并设法校正。
2、 实验目的:(1)巩固动平衡的理论知识,了解转子不平衡存在的原因及危害。
(2)掌握动转子动平衡的工作原理及平衡基本方法。
(3)理解一阶临界转速含义及实验方法。
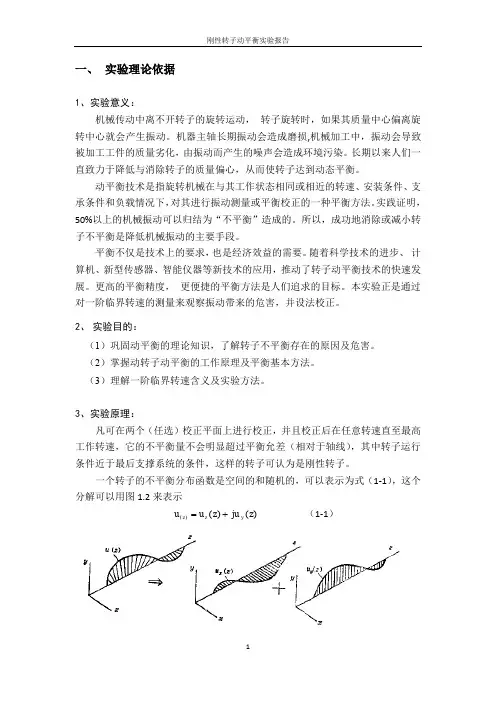
3、实验原理:凡可在两个(任选)校正平面上进行校正,并且校正后在任意转速直至最高工作转速,它的不平衡量不会明显超过平衡允差(相对于轴线),其中转子运行条件近于最后支撑系统的条件,这样的转子可认为是刚性转子。
一个转子的不平衡分布函数是空间的和随机的,可以表示为式(1-1),这个分解可以用图1.2来表示(1-1))(0)(=+=+∑⎰∑⎰i i NyNy yz y W zdz z uW dz z u i 0)(0)(=+=+∑⎰∑⎰ii NzNx zzx W zdz z u W dz z u i图1 函数分解示意图对上图中两个平面力系分别建立平衡方程:(1-2)(1-3)式中Wx 和Wy 分别为x 向与y 向的校正量,i z z i 为校正量所在的轴向坐标,N 为校正量个数,下标i 为校正量序数,这两组方程都只有N=2时才有唯一解,所以为了平衡)(z u x 和)(z u y ,必须和只要有1x W 、2x W 、1y W 和 2y W 四个校正量就足够了,只要安排1x W 和1y W 在同一轴截面上,2x W 和2y W 也在同一轴截面上,它们就可以合并成两个校正量:(1-4)如果将式1.3中的二式都乘以j ,然后分别与式1.2中的两式相加,整理后即得(1-5)这就是刚性转子的动平衡方程,其中第一式称为力平衡方程,第二式称为力偶平衡方程,从这组方程的可容性可知,只有当N=2时才有唯一解。
技术讲课教案主讲人:罗仁波培训题目:《转子动平衡——原理、方法和标准》培训目的:多种原因会引起转子某种程度的不平衡问题,分布在转子上的所有不平衡矢量的和可以认为是集中在“重点”上的一个矢量,动平衡就是确定不平衡转子重点的位置和大小的一门技术,然后在其相对应的位置处移去或添加一个相同大小的配重。
内容摘要:动平衡前要确认的条件:1.振动必须是因为动不平衡引起。
并且要确认动不平衡力占振动的主导。
2.转子可以启动和停止。
3.在转子上可以添加可去除重量。
培训教案:第一章不平衡问题种类为了以最少的启停次数,获得最佳的平衡效果,我们不仅要认识到动不平衡问题的类型(静不平衡、力偶不平衡、动不平衡,如下图),而且还要知道转子的宽径比及转速决定了采用单平面、双平面还是多平面进行动平衡操作。
同时也要认识到转子是挠性的还是刚性的。
●●刚性转子与挠性转子✧对于刚性转子,任何类型的不平衡问题都可以通过任选的二个平面得以平衡。
✧对于挠性转子,当在一个转速下平衡好后,在另一个转速下又会出现不平衡问题。
当一个挠性转子首先在低于它的70%第一监界转速下,在它的两端平面内加配重平衡好后,这两个加好的配重将补偿掉分布在整个转子上的不平衡质量,如果把这个转子的转速提高到它的第一临界转速的70%以上,这个转子由于位于转子中心处的不平衡质量所产生的离心力的作用,而产生变形,如图10所示。
由于转子的弯曲或变形,转子的重心会偏离转动中心线,而产生新的不平衡问题,此时在新的转速下又有必要在转子两端的平衡面内重新进行动平衡工作,而以后当转子转速降下来后转子又会进入到不平衡状态。
为了能在一定的转速范围内,确保转子都能处在平衡的工作状态下,唯一的解决办法是采用多平面平衡法。
✧挠性转子平衡种类1.如果转子只是在一个工作转速下运转,小量的变形不会产生过快的磨损或影响产品的质量,那么可以在任意二个平面内进行平衡,使轴承的振动降低到最小即可。
2.如果一个挠性转子,只是在一个工作转速下工作,但是将转子的变形量降低到最小是极其重要的,这时最好采用多平面动平衡修正。
转子的临界转速的定义
转子的临界转速是指在旋转过程中达到的最高转速,超过该转速后,转子将发
生失稳或失控的现象。
临界转速在实际工程中具有重要意义,因为它决定了转子可以承受的最大旋转速度,超过该速度可能会导致机械故障或事故。
临界转速的定义是通过结构动力学的分析和实验测量来确定的。
常见的方法包
括有限元分析、模态分析和凌波频率分析等。
通过这些方法,可以得到转子在不同转速下的共振频率和共振模态,并进一步确定临界转速。
在实际运行中,如果转子达到或超过临界转速,会引发轴向振动、扭曲、共振
等问题,严重时可能会导致机械破坏或工作不稳定。
因此,了解和控制转子的临界转速对于确保机械设备的安全运行至关重要。
为了避免转子的临界转速问题,可以采取以下措施:
1. 优化设计:在转子的设计阶段,通过结构和材料的合理选择,减少质量和提
高刚度,以增加转子的临界转速。
2. 动平衡:对转子进行动平衡处理,确保整个系统在运转时能够达到平衡状态,减少不必要的共振或振动。
3. 振动监测:通过振动传感器等设备实时监测转子的振动情况,及时发现异常
振动,并采取相应措施进行修复或调整。
总之,转子的临界转速是在转子设计和运行中需要注意的重要参数。
了解和控
制临界转速可以确保转子的安全运行、延长设备寿命,并提高工作效率。
机械工程师和运维人员应密切关注转子的临界转速,并采取相应措施进行控制和管理。

SGT5-4000F型燃气轮机转子高速动平衡工艺张国永1,2, 陈富新2,许雄国2, 李道云2,张岳飞1,2(1.上海交通大学机械与动力工程学院,上海200240;2.上海电气电站设备有限公司上海汽轮机厂,上海200240)摘要:介绍了SGT5-4000F型燃气轮机转子特点,根据上海汽轮机厂动平衡设备特点及挠性转子动平衡原理,提出合理的SGT5-4000F型燃气轮机转子高速动平衡工艺方案,并以实例进行阐述。
关键词:转子,动平衡工艺,燃气轮机中图分类号:文献标识码:文章编号:High Speed Balance Process of SGT5-4000FGas Turbine RotorZHANG Guo-yong1,2, CHEN Fu-xin2, XU Xiong-guo2, LI Dao-yun2, ZHANG Yue-fei1,2(1. School of Mechanical Engineering, Shanghai Jiaotong University, Shanghai 200240, China;2. Shanghai Electric Power Generation Equipment Co., Ltd. Shanghai Turbine Plant, Shanghai 200240, China)Abstract: The features of SGT5-4000F gas turbine rotor are introduced. According to the features of the balance facilities in Shanghai Turbine Plant and the balance theories of flexible rotor,a proper high speed balance process for the SGT5-4000F gas turbine rotor is proposed.The process is described with actual data.Key words: Rotor, Balance Process, Gas Turbine收稿日期:作者简介:张国永(1980-),男,工程师,2003年毕业于重庆大学机械设计制造及其自动化专业,现攻读上海交通大学机械工程工程硕士,目前在上海汽轮机厂工艺处从事总装工艺开发工作。
转子临界转速
转子临界转速(rotor critical speed)与转子及其支承系统的固有振
动频率相对应的转速。
使转子发生强烈振动的转速,它是转子动力学中研究得比较完善的一类问题。
转动系统中转子各微段的质心不可能严格处于回转轴上,因此,当转子转动时,会出现横向干扰,在某些转速下还会引起系统强烈振动,出现这种情况时的转速就是临界转速。
为保证系统正常工作或避免系统因振动而损坏,转动系统的转子工作转速应尽可能避开临界转速,若无法避开,则应采取特殊防振措施。
工程中的回转机械,如涡轮机、电机等,在运转时经常由于转轴的弹性转子偏心而发生横向弯曲振动。
当转速增至某个特定值时,振幅会突然加大,振动异常激烈,当转速超过这个特定值时,振幅又会很快减小。
使转子发生激烈振动的特定转速称为临界转速。
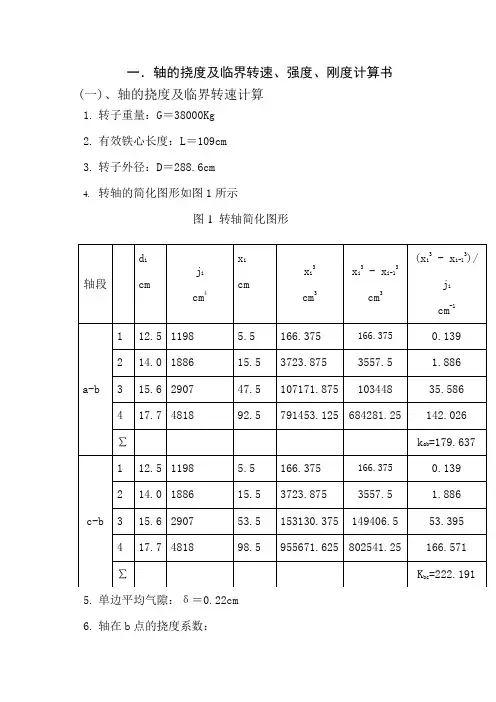
一.轴的挠度及临界转速、强度、刚度计算书(一)、轴的挠度及临界转速计算1.转子重量:G=38000Kg2.有效铁心长度:L=109cm3.转子外径:D=288.6cm4.转轴的简化图形如图1所示图1 转轴简化图形5.单边平均气隙:δ=0.22cm6.轴在b点的挠度系数:αbb =62622221221017.11.43110238.241.1791.82523-⨯=⨯⨯⨯⨯+⨯=⨯+⨯EL K L K L cb ab 7. 磁拉力刚度 k 0=cm Kg B DLs /73257)70005160(7.01096.2883)7000(322=⨯⨯⨯=δ8. 初始单边磁拉力P 0=k 0.e 0=73257×0.1×0.7=5153Kg 9. 由重量G 引起在b 点的挠度: f 1=G αbb =2200×16.8×10-6=0.03696cm 10. 单边磁拉力引起轴在b 点的挠度:f 2=f 0(1-m)=0.0237(1-0.086)=0.0055式中:f 0=[P 0/G ]f 1=[1412/2200]×0.03696=0.0237 m= f 0/e 0=0.0237/0.022=1.0773 e 0=0.1δ=0.1×0.22=0.022 11. 轴在b 点的总挠度f=f 1+f 2=0.02688+0.0055=0.0495 12. 挠度占气隙的百分数f ′=0.0495/0.7×100%=7.1% 13. 许用挠度[f ]=8%>7.1%,因此轴的挠度满足要求。
14. 转轴临界转速:n kp =200min /912044.0/)086.01(200/)1(1r f m =-=- (n kp -n N )/n N =(912-200)/200=356%>30%,因此轴的临界转速满足要求。
(二)、轴的疲劳强度的安全系数计算:轴的疲劳强度按轴上长期作用的最大变载荷进行计算,对同步电动机来说可按3倍的额定转矩来计算,轴的疲劳强度校核主要是长期受载荷作时危险截面的安全系数校核,具体计算如下: 1、轴系受力分布图轴系受力可按集中载荷考虑,受力如下图所示,其中G =38000Kg (按转子整个重量计算), 单边磁拉力P0=5153Kg,P0+G=43153Kg 。
一.轴的挠度及临界转速、强度、刚度计算书(一)、轴的挠度及临界转速计算1.转子重量:G=38000Kg2.有效铁心长度:L=109cm3.转子外径:D=288.6cm4.转轴的简化图形如图1所示图1 转轴简化图形5.单边平均气隙:δ=0.22cm6.轴在b点的挠度系数:αbb =62622221221017.11.43110238.241.1791.82523-⨯=⨯⨯⨯⨯+⨯=⨯+⨯EL K L K L cb ab 7. 磁拉力刚度 k 0=cm Kg B DLs /73257)70005160(7.01096.2883)7000(322=⨯⨯⨯=δ8. 初始单边磁拉力P 0=k 0.e 0=73257×0.1×0.7=5153Kg 9. 由重量G 引起在b 点的挠度: f 1=G αbb =2200×16.8×10-6=0.03696cm 10. 单边磁拉力引起轴在b 点的挠度:f 2=f 0(1-m)=0.0237(1-0.086)=0.0055式中:f 0=[P 0/G ]f 1=[1412/2200]×0.03696=0.0237 m= f 0/e 0=0.0237/0.022=1.0773 e 0=0.1δ=0.1×0.22=0.022 11. 轴在b 点的总挠度f=f 1+f 2=0.02688+0.0055=0.0495 12. 挠度占气隙的百分数f ′=0.0495/0.7×100%=7.1% 13. 许用挠度[f ]=8%>7.1%,因此轴的挠度满足要求。
14. 转轴临界转速:n kp =200min /912044.0/)086.01(200/)1(1r f m =-=- (n kp -n N )/n N =(912-200)/200=356%>30%,因此轴的临界转速满足要求。
(二)、轴的疲劳强度的安全系数计算:轴的疲劳强度按轴上长期作用的最大变载荷进行计算,对同步电动机来说可按3倍的额定转矩来计算,轴的疲劳强度校核主要是长期受载荷作时危险截面的安全系数校核,具体计算如下: 1、轴系受力分布图轴系受力可按集中载荷考虑,受力如下图所示,其中G =38000Kg (按转子整个重量计算), 单边磁拉力P0=5153Kg,P0+G=43153Kg 。
一临界转速概念转子在运转中都会发生振动,转子的振幅随转速的增大而增大,到某一转速时振幅达到最大值(也就是平常所说的共振),超过这一转速后振幅随转速增大逐渐减少,且稳定于某一范围内,这一转子振幅最大的转速称为转子的临界转速二临界转速原因及影响因素转子临界转速(rotor critical speed)与转子及其支承系统的固有振动频率相对应的转速。
非振型节点上具有质量偏心的转子,当其在该特征转速下运行时,将会发生剧烈振动。
一般涡轮转子起动升速过程中,当转速升至某数值时,激起机组产生最大振动,此转速称为临界转速,即此时转子及其支承系统的固有振动频率与转速的激振频率共振。
为使转子能稳定安全运行,设计转子时应使其临界转速避开工作转速15%~20%以上,由于计算临界转速时轴系模化参数的误差,计算结果是近似的,还需要经过现场实测确定,并尽可能在工作转速范围内使转子得到精确的质量平衡。
转子在各种振型下有一系列固有振动频率,因而也有相应的一系列临界转速,由低及高依次称为第一阶临界转速、第二阶临界转速等等.图(a)、 (b)、(。
)分别为双支座转子的一、二、三阶主振型图。
由图知对应于n阶,跨距间有n一1个节点。
刚性转子和挠性转子以前一般认为第一阶临界转速高于其工作转速的转子称为刚性转子;相反,第一阶临界转速低于其工作转速的转子称为挠性转子。
但以后国际标准化组织规定双支座轴振动时的主振型 (a)一阶主振型,跨距间没有节点;(b)二阶主振型,跨距之间有一个节点;(c)三阶主转子自然挠曲变形引起振型,跨距之间有两个节点的附加不平衡可以忽略不计的称为刚性转子;反之称为挠性转子。
影响临界转速的因素是转子的刚度和轴承支承的刚度。
转子材料弹性模量与温度有关,转子临界转速与其材料的弹性模量的平方根成正比。
因转子的温度随运行工况变化,故临界转速也受运行工况的影响。
支承刚度一般是指油膜、轴承和基础的总刚度,其中油膜刚度随运行工况变化较大。
转子动力学基础转子动力学基础一、转子系统基本理论转子动力学是研究转子系统运动规律的科学,主要关注旋转机械中转子的平衡、稳定性、振动以及支承等问题。
转子动力学在航空、能源、化工等领域有广泛应用。
二、转子平衡转子平衡是确保转子系统稳定运行的关键步骤。
不平衡会导致转子在旋转时产生振动,进而影响整个机械的性能。
转子平衡通常分为静平衡和动平衡两种。
静平衡是检查转子质量是否分布均匀,而动平衡则是检查转子质量与转动惯量是否匹配。
三、转子稳定性分析转子的稳定性是评估转子系统性能的重要指标。
不稳定转子在运行过程中会出现大幅振动,影响机械的正常运行。
转子稳定性分析通常涉及对转子系统的动力学模型进行稳定性分析,以确定转子在不同工况下的稳定性状态。
四、临界转速计算临界转速是指转子系统发生共振的转速。
当转子的转速接近临界转速时,系统会出现剧烈的振动。
因此,临界转速的计算对于避免共振和保证转子系统的安全运行具有重要意义。
临界转速的计算方法有多种,如试验法和解析法等。
五、转子振动分析转子振动是评估转子系统性能的重要参数。
通过对振动信号的分析,可以了解转子的状态,如不平衡、不对中、松动等。
振动分析的方法包括频谱分析、波形分析等,可以为故障诊断和维护提供依据。
六、支承与润滑系统设计支承和润滑系统是保证转子系统正常运行的重要环节。
支承系统的主要功能是承受转子的重量和产生的离心力,而润滑系统的功能是减少摩擦和磨损,保证转子正常运行。
因此,合理设计支承和润滑系统对于提高转子系统的可靠性和寿命至关重要。
七、故障诊断与维护故障诊断与维护是保证转子系统长期稳定运行的关键措施。
通过监测和分析转子系统的运行状态,可以及时发现潜在的故障并采取相应的维护措施。
常用的故障诊断方法包括振动监测、声发射监测等。
此外,对转子系统的定期维护和保养也是保证其正常运行的重要措施。
八、转子动力学实验技术实验技术是验证和改进转子动力学理论的重要手段。
通过实验可以观测和分析转子系统的各种现象,如不平衡响应、振动模式等。
转子动力学的平衡和稳定性转子动力学是研究旋转机械系统的运动平衡和稳定性的学科。
在工程领域中,转子动力学的研究对于提高转子系统的运行可靠性和性能至关重要。
本文将从转子动力学平衡和稳定性两个方面展开论述。
1. 转子动力学的平衡转子动力学平衡是指转子在旋转过程中各部分的力和力矩之和为零的状态。
转子平衡的主要目标是消除不平衡力和不平衡力矩,以减小振动和噪声,并提高转子系统的工作效率和寿命。
1.1 静不平衡静不平衡是指转子在其自然运行速度下,由于质量分布不均匀而产生的力和力矩不平衡。
产生静不平衡的原因可能是转子制造过程中的质量分布不均匀或者装配过程中的安装偏差等。
通过在转子上增加补偿质量,可以减小或消除静不平衡。
1.2 动不平衡动不平衡是指转子在旋转过程中由于质心与转轴中心线之间有径向距离而产生的力和力矩不平衡。
动不平衡主要是由于转子密度分布不均匀或者转轴弯曲引起的。
通过动平衡技术,可以通过在转子上添加动平衡质量来消除动不平衡。
2. 转子动力学的稳定性转子动力学稳定性是指在特定的工作条件下,转子系统的运动是否保持平衡、稳定并趋向于原始位置。
转子动力学稳定性的研究对于预防转子系统的不稳定振动和失稳现象具有重要意义。
2.1 刚性转子的稳定性刚性转子是指转子在旋转过程中不发生弯曲、挠曲和撞击等现象。
刚性转子的稳定性分析主要涉及到转子的临界转速、共振、失稳等问题。
通过对刚性转子进行固有频率和模态分析,可以预测和避免转子系统的失稳现象。
2.2 弹性转子的稳定性弹性转子是指转子在旋转过程中会发生弯曲、挠曲和撞击等现象。
弹性转子的稳定性分析需要考虑转子的刚度、扭转刚度、挠曲刚度和阻尼等因素。
通过弹性转子的模态分析和振动响应分析,可以评估和改善转子系统的稳定性。
3. 转子动力学的优化为了提高转子系统的平衡和稳定性,有必要进行转子动力学的优化设计。
3.1 材料优化选择适当的材料和加工工艺对于提高转子的平衡和稳定性至关重要。