齿轮系及其设计讲义(新)
- 格式:ppt
- 大小:3.34 MB
- 文档页数:50
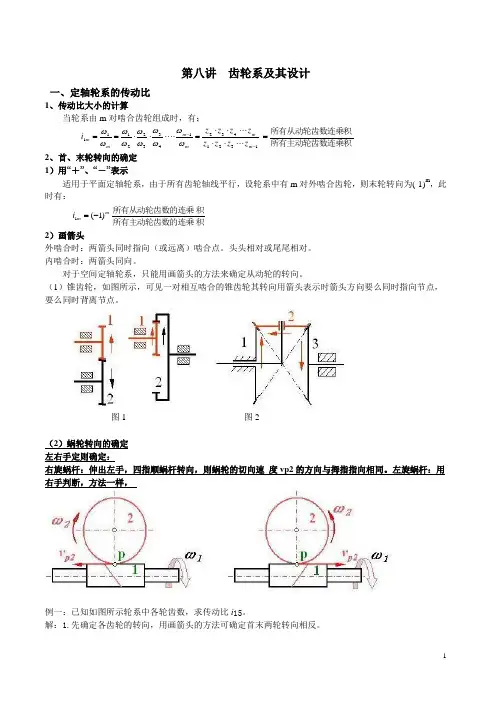
第八讲 齿轮系及其设计一、定轴轮系的传动比1、传动比大小的计算当轮系由m 对啮合齿轮组成时,有:1321432143322111--⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅=⋅⋅⋅⋅⋅⋅==m m m m m m z z z z z z z z i ωωωωωωωωωω所有主动轮齿数连乘积所有从动轮齿数连乘积=2、首、末轮转向的确定1)用“+”、“-”表示适用于平面定轴轮系,由于所有齿轮轴线平行,设轮系中有m 对外啮合齿轮,则末轮转向为(-1)m,此时有:积所有主动轮齿数的连乘积所有从动轮齿数的连乘mm i )1(1-=2)画箭头外啮合时:两箭头同时指向(或远离)啮合点。
头头相对或尾尾相对。
内啮合时:两箭头同向。
对于空间定轴轮系,只能用画箭头的方法来确定从动轮的转向。
(1)锥齿轮,如图所示,可见一对相互啮合的锥齿轮其转向用箭头表示时箭头方向要么同时指向节点,要么同时背离节点。
图1 图2(2)蜗轮转向的确定 左右手定则确定:右旋蜗杆:伸出左手,四指顺蜗杆转向,则蜗轮的切向速 度vp2的方向与拇指指向相同。
左旋蜗杆:用右手判断,方法一样,例一:已知如图所示轮系中各轮齿数,求传动比i 15。
解:1.先确定各齿轮的转向,用画箭头的方法可确定首末两轮转向相反。
2. 计算传动比'4'31543'4'32154325115Z Z Z Z Z Z Z Z Z Z Z Z Z Z i -=-==ω其中齿轮2对传动比没有影响,但能改变从动轮的转向,称其为过轮或中介轮。
图二、 周转轮系的传动比周转轮系的分类除按自由度以外,还可根据其基本构件的不同来加以分类,如图所示,设轮系中的太阳轮以K 表示,系杆以H 表示,则图6所示为2K —H 型轮系;图7为3K 型轮系,因其基本构件为3个中心轮,而系杆只起支撑行星轮的作用。
在实际机构中常用2K —H 型轮系。
图5 图7反转原理:给周转轮系施以附加的公共转动-H ω后,不改变轮系中各构件之间的相对运动, 但原轮系将转化成为一新的定轴轮系,可按定轴轮系的公式计算该新轮系的传动比。
第十一章齿轮系及其设计一、教学目标及基本要求1. 了解各类轮系的组成和运动特点,学会判断一个已知轮系属于何种轮系。
2. 熟练掌握各种轮系传动比的计算方法,会确定主、从动轮的转向关系;掌握周转轮系的传动特性与类型和结构的关系。
3. 了解各类轮系的功能,学会根据各种要求正确选择轮系类型。
4. 了解行星轮系效率的概念及其主要影响因素。
5. 了解复合轮系的组合方法,学会分析复合轮系的组成,正确计算其传动比。
6. 了解行星轮系设计的几个基本问题;了解几种其它类型行星传动的原理及特点。
二、教学内容1.轮系的分类2.定轴轮系及其设计3.周转轮系及其设计4.复合轮系及其设计5.少齿差传动简介三、教学内容的重点和难点重点:1. 轮系传动比的计算。
2. 轮系的设计。
难点:复合轮系传动比计算四、教学内容的深化与拓宽新型少齿差传动五、教学方式与手段及教学过程中应注意的问题充分利用多媒体教学手段,围绕教学基本要求进行教学。
在教学过程中应注意强调应用反转法原理求解周转轮系传动比方法的实质、转化机构的概念、正确划分基本轮系的方法。
要注意突出重点,多采用启发式教学以及教师和学生的互动。
六、主要参考书目1 黄茂林,秦伟主编.机械原理.北京:机械工业出版社,20022 申永胜主编.机械原理教程.北京:清华大学出版社,19993 曲继方,安子军,曲志刚.机构创新设计.北京:科学出版社,2001七、相关的实践性环节参观机械创新设计实验室。
八、课外学习要求自学定轴轮系的传动效率计算、定轴轮系设计中的几个问题、封闭型轮系的功率流等内容。
九、习题11-1,11-2,11-5,11-13。