探测大气气溶胶消光系数的便携式米散射激光雷达
- 格式:pdf
- 大小:191.71 KB
- 文档页数:3
南京信息工程大学激光雷达探测气溶胶实验报告姓名:***学号:***********学院:物理与光电工程学院专业:光信息科学与技术二〇一四年十二月十二日摘要:大气气溶胶影响着天气和气候的变化,通过用激光雷达对水平大气中的气溶胶进行连续观测,得到大气气溶胶浓度的高度分布数据,用Klett法反演和斜率法得到了气溶胶消光系数数值并利用MATLAB程序用计算机对所得实验数据快速方便地直接得出出测量结果和图示。
关键词:气溶胶;激光雷达;探测;Klett反演算法;斜率法;消光系数;MATLAB前言大气气溶胶是指悬浮在大气中直径为0.001—100μm的液体或固体微粒体系。
对流层气溶胶的形成与地球表面的生态环境和人类活动直接相关。
地面扬尘、沙尘暴、林火烟灰、花粉与种子、海水溅沫等是对流层气溶胶的自然源,人工源则是由工业、交通、农业、建筑等直接向对流层中排放的气溶胶粒子。
同时,对流层大气中许多气态污染物的最终归宿是形成气溶胶粒子,如二氧化硫、氮氧化物、碳氢化合物等通过气粒转化生成气溶胶粒子。
这些气溶胶粒子通过吸收和散射太阳辐射以及地球的长波辐射而影响着地球大气系统的辐射收支,它作为凝结核参与云的形成,从而对局地、区域乃至全球的气候有着重要的影响。
对流层气溶胶粒子对激光的吸收和散射作用使它成为激光大气传输的重要消光因子。
激光雷达为大气气溶胶探测研究提供了有力的工具。
数十年来,激光技术的不断发展为激光雷达大气气溶胶探测提供了所需要的光源。
另一方面,信号探测和数据采集及其控制技术的发展使激光雷达在大气气溶胶的探测高度、空间分辨率、时间上的连续监测和测量精度等方面具有全面的优势,是其它探测手段不能比拟的。
本文介绍该激光雷达的总体结构、技术参数及其工作原理,同时给出了大气气溶胶的垂直消光系数廓线以及典型测量结果的分析和讨论。
1,研究的目的大气中,尘埃、烟雾、云团等气溶胶粒子对大气的化学过程、辐射平衡、气候变化乃至人们的日常生活都有着非常重要的影响。
简析双波长米散射激光雷达探测对流层气溶胶消光特性【摘要】双波长米散射激光雷达在对夜晚及白天对流层气溶胶消失进行系数的垂直分布探测,适用的波长为532 nm和1 064 nm。
该雷达主要组成部分包括激光发射设备、接受光学与后继光学系统、信号探测及采集设备、系统运行设备等几个主要的组成部分,主要采用高低层分层探测及光纤导光等技术进行支持。
【关键词】双波长米散射激光雷达;结构;技术参数;气溶胶;消光系数中图分类号:p42文献标识码:a文章编号:1006-0278(2012)04-121-01随着我国军事事业的飞速发展,该技术军事探测领域的应用前景十分广阔,本文主要研究双波长米散射激光雷达的组成结构、技术参数等方面内容。
一、总体结构及关键技术雷达主要由激光发射设备、接收光学及后继光学设备、信号探测与采集设备、系统运行控制设备等几个主要单元构成。
(一)激光发射设备该设备的主要功能在于对望远镜俯仰运动时,接收望远镜与激光光束沿着光轴平行的方向进入大气中。
其组成主要是五个反射镜和nd:yag激光器组成,距离较近的对大气回波信号采用几何重叠因子进行修正,通过激光雷达的大气探测获得几何重叠因子。
为保证双波长米散射激光雷达在垂直与水平两个方向进行探测时的几何重叠因子不发生变动,其发射设备也进行了特殊的设计。
、反射镜1至4、nd:yag激光器都根据图1设置,然后将其固定于光学平台,保证其之间的稳定。
在接收望远镜俯仰侧壁上安装反射镜5,其镜面中心要位于望远镜转轴上,这样就能与反射镜4反射的激光光束在俯仰转轴上重合,然后由反射镜5将激光光束沿着接收望远镜光轴平行的方向射入对流层。
整个过程全部在密封套管内完成。
(二)接收光学和后继光学设备该设备主要作用是把来自不同距离的两个波长进行收集,然后导入光电探测器进行下一步分析。
后继光学设备与望远镜支撑架都在光学平台上固定着,两者之间采用光纤进行耦合。
该结构不但保证了接受望远镜在垂直与水平方向指向时接收的大气后散射光由光纤导入后继光学设备,还保证了后继光学设备之后的整个探测单元的稳定。
地基拉曼-米激光雷达气溶胶后向散射及消光系数反演摘要:本文利用地基拉曼-米激光雷达(LM-Lidar)测量气溶胶垂直廓线数据,并通过气溶胶后向散射和消光系数反演,定量分析了气溶胶光学特性和气象条件对气溶胶垂直廓线的影响。
结果表明,LM-Lidar在不同气象条件下的探测效果较好,反演出的后向散射系数和消光系数均在合理范围内。
气溶胶消光系数的空间分布存在明显的季节变化,冬季消光强,夏季消光弱;而后向散射系数则存在明显的日变化,白天偏大,晚上偏小。
在此基础上,本文讨论了气溶胶光学特性与气象因素之间的耦合关系,揭示气象因素对气溶胶辐射强迫效应的影响。
关键词:地基拉曼-米激光雷达;后向散射系数;消光系数;气溶胶;气象条件1. 引言气溶胶是大气中重要的成分之一,在大气辐射传输中具有重要的作用。
气溶胶的光学特性是描述气溶胶对光的吸收、散射和透射情况的物理量,对于准确估算气溶胶辐射强迫效应、探测气溶胶粒径、浓度及其垂直廓线等都有着重要的意义。
地基激光雷达是目前气溶胶探测中广泛使用的一种技术手段。
本文利用地基拉曼-米激光雷达测量气溶胶垂直廓线数据,通过反演气溶胶后向散射和消光系数,研究气溶胶在不同气象条件下的光学特性和空间分布。
2. 实验方法本文使用地基拉曼-米激光雷达对大气垂直廓线进行探测,分别在春、夏、秋、冬四季对同一站点的大气进行连续24小时探测,并根据垂直风速、气温等气象信息将探测数据分为不同气象条件下的数据。
通过利用已有气溶胶光学模型,反演气溶胶后向散射和消光系数。
3. 结果分析通过反演分析气溶胶后向散射和消光系数,可以得到不同气象条件下的气溶胶垂直廓线及其光学参数。
结果表明,在不同气象条件下,LM-Lidar探测效果较好,反演出的后向散射系数和消光系数均在合理范围内。
气溶胶消光系数的空间分布存在明显的季节变化,冬季消光强,夏季消光弱;而后向散射系数则存在明显的日变化,白天偏大,晚上偏小。
通过与实际测定数据进行对比,可以发现本文反演出的气溶胶光学参数与实测数据较为吻合,反演结果可信。
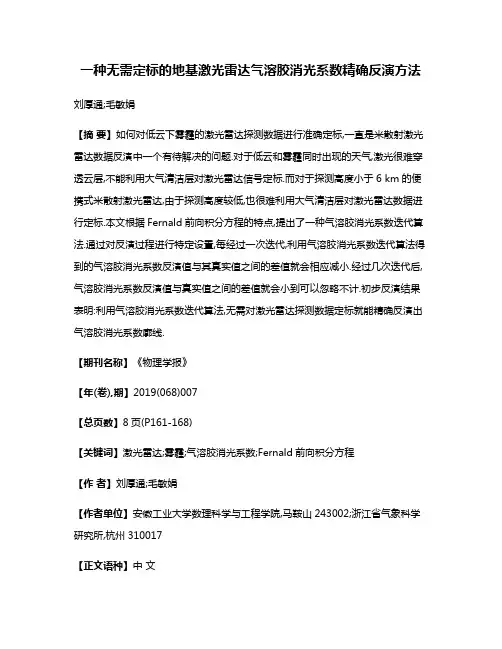
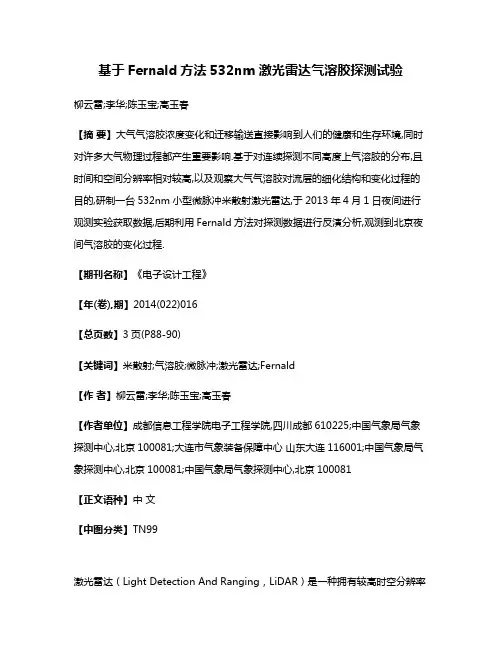
一种无需定标的地基激光雷达气溶胶消光系数精确反演方法刘厚通;毛敏娟【摘要】如何对低云下雾霾的激光雷达探测数据进行准确定标,一直是米散射激光雷达数据反演中一个有待解决的问题.对于低云和雾霾同时出现的天气,激光很难穿透云层,不能利用大气清洁层对激光雷达信号定标.而对于探测高度小于6 km的便携式米散射激光雷达,由于探测高度较低,也很难利用大气清洁层对激光雷达数据进行定标.本文根据Fernald前向积分方程的特点,提出了一种气溶胶消光系数迭代算法.通过对反演过程进行特定设置,每经过一次迭代,利用气溶胶消光系数迭代算法得到的气溶胶消光系数反演值与其真实值之间的差值就会相应减小.经过几次迭代后,气溶胶消光系数反演值与真实值之间的差值就会小到可以忽略不计.初步反演结果表明:利用气溶胶消光系数迭代算法,无需对激光雷达探测数据定标就能精确反演出气溶胶消光系数廓线.【期刊名称】《物理学报》【年(卷),期】2019(068)007【总页数】8页(P161-168)【关键词】激光雷达;雾霾;气溶胶消光系数;Fernald前向积分方程【作者】刘厚通;毛敏娟【作者单位】安徽工业大学数理科学与工程学院,马鞍山243002;浙江省气象科学研究所,杭州310017【正文语种】中文1 引言如何对地基米散射激光雷达回波信号进行准确定标一直是激光雷达数据反演中的一个重要研究课题[1]. 对于探测高度较高的米散射激光雷达,标定高度一般选取近乎不含气溶胶粒子的清洁大气层所在的高度来确定, 这个高度一般选在对流层顶附近[2−4]. 但对于探测最高高度在6 km左右的米散射激光雷达, 可以选取4–6 km高度范围内X(z ")/ (z ")的最小值所在的高度为标定高度[5−7],X(z "), (z ")的物理意义见参考文献[7], 由于4–6 km高度范围内X(z ")/ (z ")的最小值所对应的气溶胶消光系数或后向散射系数是变化的, 所以这种定标法得到的标定值存在一定的误差. 利用激光雷达对雾霾探测数据进行探测, 如果雾霾层上无云且激光能够透过雾霾层到达较高的高度, 可以采用“大气清洁层”对激光雷达信号定标[2−4], 或者采用斜率法进行定标[8,9], 利用斜率法对水平探测的激光雷达信号进行定标时, 能够获得比较准确的标定值, 但对于垂直探测的激光雷达数据, 利用斜率法得到的标定值存在一定的误差, 有时误差还比较大; 如果雾霾上无云但激光束穿透雾霾后只能到达6 km左右的高度, 此时仍然可以利用4–6 km的某个高度区域进行定标[5−7], 但是由于4–6 km高度范围内的气溶胶受到地面雾霾颗粒的“污染”, 定标误差较大; 如果雾霾上有低云,利用激光雷达对低云和雾霾同时出现的大气进行探测时, 由于雾霾和低云都具有很强的消光特性,有时激光很难穿透云层, 也就是说很难利用云上的大气清洁层对激光雷达探测信号进行定标, 而处于云层和雾霾之间的气溶胶层, 由于受云层和雾霾的“污染”, 其消光系数变化较大而且很难找到所谓的“均匀层”, 一般也不能利用斜率法进行定标, 这时利用传统的定标法将无法对激光雷达信号进行准确定标, 从而影响雾霾消光系数垂直分布数据的准确获取.本文提出了一种基于Fernald前向积分方程的气溶胶消光系数反演方法, 为了表达方便, 该法在本文中简称为气溶胶消光系数迭代算法. 利用气溶胶消光系数迭代算法, 无需对激光雷达信号定标就能准确求出气溶胶消光系数, 这种方法不仅适用于激光雷达对低云下雾霾探测数据的消光系数反演, 也可应用于探测高度较低(小于6 km)的米散射激光雷达信号(例如微脉冲激光雷达)的气溶胶消光系数求解.2 理论基础当米散射激光雷达垂直向大气中发射532 nm波长的激光时, 对每一发激光脉冲, 望远镜接收到高度处大气后向散射回波功率可以用米散射激光雷达方程表示为[10−13]其中C是激光雷达系统标定常数, 可以通过实验测得 . = + , 和分别是高度处的气溶胶粒子和大气分子的后向散射系数. 是地面到高度的大气透过率. 利用(1)式, 可以得到激光雷达距离校正信号为根据激光脉冲能量和实验测得的激光雷达几何重叠因子, 可以获得归一化激光雷达距离校正信号为由(3)式可得到大气后向散射系数表示式为在 (4)式中, 只要知道和 , 就能求得高度处的气溶胶和分子的总后向散射系数. 本文中分子后向散射系数垂直分布采用美国标准大气模式[12]. 根据 = , 可以得到高度处的气溶胶后向散射系数 . 高度处的气溶胶消光系数可以利用下式求得:其中的S1为气溶胶激光雷达比, 在本文中S1 = 50 sr.从地面到高度处大气透过率可表示为[14]:其中 , 是高度处的大气分子消光系数.利用米散射激光雷达数据反演气溶胶消光系数, 通常采用Klett算法和Fernald算法, 其中根据Fernald提供的前向积分算法对激光雷达信号进行处理得到的气溶胶消光系数廓线表达式为[15,16]:Fernald后向积分算法的表达式为[15,16]3 雾霾消光系数精确反演3.1 气溶胶消光系数迭代算法简介激光雷达不但能够探测雾霾的强度, 还能够探测雾霾的垂直分布[17−19], 但是对于无法利用“清洁层”进行定标的雾霾探测数据的普适定标方法研究, 至今没见相关文献报道. 图1所示的是2017年3月30日凌晨1点在安徽工业大学东区, 利用安徽工业大学拉曼−米散射激光雷达探测雾霾时得到的532 nm通道激光雷达归一化距离校正回波信号, 该回波信号已经过激光雷达几何重叠因子订正. 从图1中可以看出, 由于雾霾上方存在水云层,激光束不能同时穿透雾霾和水云层, 难以利用“大气清洁层”对激光雷达信号进行定标. 激光雷达在工作时有一段信号盲区, 在信号盲区内几何重叠因子几乎为 0, 难以获得准确的激光雷达回波信号.本文参考美国标准大气模式, 依据文献[20]中的方法得到盲区的激光雷达回波信号数据. 安徽工业大学拉曼−米散射激光雷达由中国科学院安徽光学精密机械研究所研制, 共有四个探测通道: 532 nm偏振平行通道、532 nm偏振垂直通道、607 nm通道及660 nm通道, 其接收望远镜直径为400 mm.532 nm通道的激光脉冲能量为210 mJ, 对晴天气溶胶进行探测时激光雷达回波信号的有效高度一般在15 km以上.图1 雾霾的激光雷达距离校正回波信号Fig. 1. The range corrected lidar signal about fog and haze.下面以这组信号的气溶胶消光系数反演为例说明气溶胶消光系数迭代算法的主要步骤.1)根据激光功率计监测得到的激光脉冲能量,对图1中的激光雷达信号廓线进行归一化处理, 得到归一化信号 .2)第一次迭代. 以图1中A点为迭代起点, 该点选在激光雷达激光发射口处, 以某高度处的B点的消光系数值为迭代结束项, B点的位置应在激光雷达几何重叠因子范围之外, 当然在具体计算中应该固定一个高度, 例如本文中的B点选在1.02 km高度处(因为激光雷达的垂直探测分辨率为0.03 km), 这样有利于计算程序的编写. A 点选在激光发射口处, 也即中的0高度处, 这样可以直接利用(4)式得到B点的气溶胶后向散射系数, 进而得到B高度处气溶胶消光系数.假定A, B两点之间大气透过率为T1(本文中T1 = 0.8), 根据(4)式和(5)式算出B点的气溶胶消光系数 . 令地面A点的气溶胶消光系数的取值范围为 0–2 km–1, 的取值从 0 km–1开始, 以 0.01 km–1的步长递增. 对应每一个A点的气溶胶消光系数值, 根据(7)式和激光雷达归一化信号 , 就会得到一条气溶胶消光系数廓线 , 同时也得到B点的气溶胶消光系数 . 迭代结束条件为当和的值满足(9)式时, 迭代结束,此时所对应的气溶胶消光系数廓线即为所求. (9)式中的应根据实际反演的需要取值, 本文中的取值为 0.00001 km–1.3)第二次迭代. 根据第一次迭代得到的气溶胶消光系数廓线 , 利用(6)式再次求出0–1.02 km高度范围内的大气透过率T2, 然后重复第一次迭代的步骤, 再次得到气溶胶消光系数廓线……..4)最终反演结果确定. 假设根据第k–1次迭代得到的气溶胶消光系数廓线和第k次迭代得到的消光系数廓线在1.02 km高度处的气溶胶消光系数之差小于某一设定值c =0.00001 km–1, 即则即为所求的雾霾消光系数廓线.3.2 大气透过率初始值范围确定方法在上面的反演中, 由于大气透过率初始值T1是任意设置的, 可能出现因为T1的初设值和真实值相差太大而无法迭代反演出准确的气溶胶消光系数的情况.对于图1中的激光雷达数据, 当0–1.02 km高度范围内的大气透过率分别预设为50%, 55%,60%, 65%, 70%和75%时, 第一次迭代获得的对应高度范围内的大气透过率分别为57.43%,61.33%, 64.88%, 68.09%, 71.10%和73.69%. 可以看出, 当大气透过率初设值在50%–70%范围内时, 第一次迭代得到的0–1.02 km大气透过率均比初设值高. 初步反演表明:利用(7)式和3.1节的迭代步骤进行消光系数反演时, 随着迭代次数的增加, 得到的0–1.02 km范围内的大气透过率有趋于真值的趋势, 由此可知0–1.02 km的大气透过率应该高于70%. 而当大气透过率初设值为75%时, 第一次迭代反演得到的0–1.02 km的大气透过率为73.69%, 小于初设值75%, 也就是说0–1.02 km高度范围内的大气透过率小于75%.从上面的分析可以得到0–1.02 km范围的大气透过率在70%–75%之间. 大气透过率初设值和第一次迭代结果对应的大气透过率值之间的关系如图2所示. 图2中的纵坐标表示大气透过率的初设值, 横坐标表示大气透过率初设值的赋值序号.图2 大气透过率初始值与第一次迭代值之间的关系Fig. 2. The relationship between the initial values and the first iterative values of atmospheric transmittance.3.3 反演结果根究上面的分析, 取大气透过率初始值为0.7,根据3.1节的迭代步骤, 经过7次迭代, 反演得到雾霾的消光系数如图3所示, 图3中第7次迭代得到的气溶胶消光系数即为所求. 由于经过3.2节的估算, 0–1.02 km大气透过率的初设值0.7和真实值相差不大, 所以在图3中的7次迭代反演得到的气溶胶消光系数之间差别较小.图3 利用气溶胶消光系数迭代算法反演得到的气溶胶消光系数廓线Fig. 3. The aerosol extinction coefficient profiles retrieved by the iterative algorithm of aerosol extinction coefficient.3.4 反演结果验证与分析利用气溶胶消光系数迭代算法反演得到的雾霾的消光系数垂直分布是否正确?由于利用现有的定标方法不能对低云下雾霾的激光雷达探测信号进行准确定标, 使得上述反演结果无法得到验证. 但是, 对于探测高度较高的激光雷达信号, 利用气溶胶消光系数迭代算法进行消光系数反演得到的气溶胶消光系数廓线, 和利用大气清洁层定标得到的气溶胶消光系数廓线比较, 如果两者符合得很好, 则证明利用气溶胶消光系数迭代算法能够准确反演得到气溶胶消光系数廓线.图4是在2005年2月22日晚8点, 利用中国科学院安徽光学精密机械研究所研制的偏振–米散射激光雷达对合肥上空的气溶胶进行探测时, 根据激光脉冲能量及(1)式–(3)式得到的一组归一化激光雷达距离校正回波信号. 偏振–米散射激光雷达探测波长为532 nm, 单发激光脉冲能量可达180 mJ,接收望远镜孔径为254 mm, 设有两种可切换的探测模式(米散射探测模式和米散射–偏振探测模式)能够对气溶胶消光系数、后向散射系数及偏振特性进行测量.图4 米散射激光雷达距离校正信号Fig. 4. The range corrected lidar signal of the Mie scatter−ing lidar.利用3.1节中的气溶胶消光系数迭代算法对图4中的激光雷达信号进行处理, 经过4次迭代,得到气溶胶消光系数廓线如图5中曲线A所示.由于图4中的激光雷达回波信号探测高度较高, 可以利用8–14 km的“大气清洁层”进行定标, 并在标定点上、下分别利用(7)式和(8)式进行气溶胶消光系数反演, 反演结果如图5中的B线所示, 由于利用8–14 km高度范围内“大气清洁层”定标法和Fernald方程(7)式和(8)式获得的气溶胶消光系数比较可靠, 本文把图5中的B曲线作为气溶胶消光系数标准廓线.图5 利用气溶胶消光系数迭代算法与其他定标方法获得的气溶胶消光系数比较Fig.5. Comparison of aerosol extin ction coefficients ob−tained by the iterative algorithm of aerosol extinction coef−ficient and other calibration methods.从图5中可以看出, 基于Fernald积分方程,利用“大气清洁层”定标法获得的气溶胶消光系数廓线和利用气溶胶消光系数迭代算法获得气溶胶消光系数廓线基本符合, 说明利用气溶胶消光系数迭代算法反演得到的气溶胶消光系数是准确的.对于雾霾上有云且激光没有穿透云层的激光雷达探测数据, 斜率法是一种常用的定标方法. 利用斜率法对图4中的激光雷达信号进行定标(拟合高度范围为3–4.6 km, 在此范围内的大气符合均匀层的条件), 在标定点上、下分别采用Fernald前向积分方程和Fernald后向积分方程进行反演, 得到的气溶胶消光系数廓线如图5中曲线C所示.从图中可以看出, 利用斜率法定标和气溶胶消光系数迭代算法获得的气溶胶消光系数廓线之间存在一定的差别, 如果以图5中曲线B的反演结果作为标准, 则利用斜率法定标得到的气溶胶消光系数廓线的精度低于利用气溶胶消光系数迭代算法获得的气溶胶消光系数廓线的精度.需要说明的是, Fernald前向积分公式在地基激光雷达气溶胶消光系数反演中很少用到, 根本原因是该公式具有“误差发散特性”, 容易得到不稳定的解. 但是根据气溶胶消光系数迭代算法, 对(7)式按照本文3.1节的反演方法设置A, B两点, 尽管开始时A, B两点之间的大气透过率初始值和大气透过率真实值之间相差较大, 但是每经过一次迭代, 反演得到的A, B两高度之间的大气透过率反演值和真实值之间的差值就会相应减小, 经过几次迭代, A, B两高度之间的大气透过率反演值和真实值之间的差值已经很小, 这时得到的B高度处的气溶胶消光系数接近B点气溶胶消光系数的真实值. 尽管气溶胶消光系数迭代算法是以Fernald前向积分方程为基础的,但是只要参照本文3.1节的设置, 利用气溶胶消光系数迭代算法求解A,B之间的大气透过率时能够获得“稳定解”, 进而得到准确的气溶胶消光系数垂直分布.3.5 几何重叠因子的影响由于用于迭代的两点之间的大气透过率所在的高度范围包含整个几何重叠因子区, 激光雷达几何重叠因子的误差会直接导致定标高度范围内的大气透过率的误差, 从而对整条气溶胶消光系数廓线的反演精度产生影响. 对地基米散射激光雷达来说, 如果在晴朗、微风的傍晚进行激光雷达几何重叠因子的测量, 并把多次测量的平均值作为激光雷达几何重叠因子的标准值, 可知每次测量的激光雷达几何重叠因子的误差都不大, 其相对误差一般不会超过10%, 且实验测得的激光雷达几何重叠因子的误差一般在500 m以下.图6是在晴空、微风的傍晚, 利用偏振–米散射激光雷达水平对大气探测时得到的激光雷达几何重叠因子, 该激光雷达几何重叠因子的距离范围为0–0.72 km, 当激光雷达几何重叠因子在0–0.72 km距离范围内的每个值不存在误差、存在5%及10%的误差时(见图6), 对应的归一化激光雷达距离校正回波信号有明显的差别(图7), 由于在几何重叠因子以上激光雷达回波信号相同, 图7只显示0–3 km高度范围内的激光雷达回波信号.图6 激光雷达几何重叠校正因子的相对误差Fig. 6. The relative errors of lidar overlap function.图7 不同的激光雷达几何重叠因子误差所对应的激光雷达距离校正信号Fig. 7. The range corrected lidar signals corresponding to different errors of lidar geometric overlap function.图8 几何重叠因子误差对气溶胶消光系数反演值的影响Fig. 8. The influence of lidar overlap function error on the retrievals of aerosol extinction coefficients.根据激光雷达几何重叠因子不存在误差、存在5%及10%的误差时得到的激光雷达距离校正信号, 利用气溶胶消光系数迭代算法反演得到的气溶胶消光系数廓线如图8所示, 可以看出, 尽管几何重叠因子存在一定的误差, 利用气溶胶消光系数迭代算法反演得到的气溶胶消光系数廓线和几何重叠因子不存在误差时的气溶胶消光系数廓线几乎重合. 对激光雷达几何重叠因子的多次实际测量表明, 单次测得的几何重叠因子的误差一般不会大于5%, 所以几何重叠因子的误差对气溶胶消光系数迭代算法的反演结果影响不大.4 结论到目前为止, 难以对低空大气探测激光雷达数据和低云下雾霾的激光雷达探测数据进行准确定标. 本文根据Fernald前向积分方程的特点, 提出了一种新的大气探测激光雷达数据反演方法––气溶胶消光系数迭代算法. 这种算法可以先预设某一高度范围内大气透过率一系列的值, 然后根据气溶胶消光系数迭代算法的第一次迭代结果找到大气透过率初始值的准确范围, 进而利用相对精确的大气透过率初始值及气溶胶消光系数迭代算法得到准确的气溶胶消光系数.初步反演结果表明:该算法不用对米散射激光雷达数据进行定标就能准确求出气溶胶消光系数,这对不能凭借“大气清洁层”定标的激光雷达数据的气溶胶消光系数反演具有重要的意义. 激光雷达几何重叠因子对气溶胶消光系数迭代算法的反演结果影响不大, 当然几何重叠因子越准确, 利用气溶胶消光系数迭代算法反演得到的气溶胶消光系数误差越小.参考文献【相关文献】[1]Sun G D, Qin L A, Zhang S L, He F, Tan F F, Jing X, Hou Z H 2018 Acta Phys. Sin. 67 054205 (in Chinese) [孙国栋, 秦来安, 张巳龙, 何枫, 谭逢富, 靖旭, 侯再红 2018 物理学报 67 054205][2]Chi R L, Wu D C, Liu B, Zhou J 2009 Spectrosc. Spect.Anal. 29 001468 (in Chinese) [迟如利, 吴德成, 刘博, 周军2009 光谱学与光谱分析 29 001468][3]Lefrere J, Pelon J, Cahen C, Hauchecorne A, Flamant P 1981 Appl. Opt. 20 A70[4]Ansmann A, Wandinger U, Riebesell M, Weitkamp C,Michaelis W 1992 Appl. Opt. 31 7113[5]Chen S S, Xu Q S, Xu C D, Yu D S, Chen X W 2017 Acta Opt. Sin. 37 9 (in Chinese) [陈莎莎, 徐青山, 徐赤东, 余东升,陈小威 2017 光学学报 37 9][6]Huang X Y, Yang X W, Geng F H, Zhang H, He Q S, Bu L B 2010 J. Opt. Soc. Korea 14 185[7]Hee W S, Khor W Y, Lim H S, Jafri M Z M 2015 AIP Conference Proceedings Kuala Lumpur, November 18–19,2014 040015[8]Liang M, Peng G, Yang Y, Zheng K 2017 Opt. Express 25 A628[9]Klett J D 1981 Appl. Opt. 20 211[10]Russell P B, Swissler T J, Mccormick M P 1979 Appl. Opt. 8 3873[11]Chiang C W, Das S K, Nee J B 2008 J. Quant. Spectrosc.Radiat. Transfer 109 1187[12]NOAA U, Force U A 1976 US Standard Atmosphere[13]Liu H T, Wang Z Z, Zhao J X, Ma J J 2018 Curr. Opt.Photon. 2 119[14]Salem E 2007 J. Mod. Opt. 42 1439[15]Liu H T, Chen L F, Su L 2011 Acta Phys. Sin. 60 064204 (in Chinese) [刘厚通, 陈良富, 苏林 2011 物理学报 60 064204][16]Fernald F G 1984 Appl. Opt. 23 652[17]Xian J H, Han Y L, Huang S Y, Sun D S, Zheng J, Han F,Zhou A R, Yang S C, Xu W J, Song Q C, Wei L F, Tan Q Z,Li X Z 2018 Opt. Express 26 34853[18]Wong M S, Qin K, Lian H, Campbell J R, Lee K H, Sheng S J 2017 Atmos. Environ. 154 189[19]Wang J, Zhang T, Liu W, Liu J, Wan X 2018 OSA Technical Digest (Optical Society of America, 2018) Singapore November 5–8, 2018 ET3A.1.[20]Di H G, Hua D X, Wang Y F, Yan Q 2013 Acta Phys. Sin.62 094215 (in Chinese) [狄慧鸽, 华灯鑫, 王玉峰, 闫庆 2013物理学报 62 094215]。
基于Fernald方法532nm激光雷达气溶胶探测试验柳云雷;李华;陈玉宝;高玉春【摘要】大气气溶胶浓度变化和迁移输送直接影响到人们的健康和生存环境,同时对许多大气物理过程都产生重要影响.基于对连续探测不同高度上气溶胶的分布,且时间和空间分辨率相对较高,以及观察大气气溶胶对流层的细化结构和变化过程的目的,研制一台532nm小型微脉冲米散射激光雷达,于2013年4月1日夜间进行观测实验获取数据,后期利用Fernald方法对探测数据进行反演分析,观测到北京夜间气溶胶的变化过程.【期刊名称】《电子设计工程》【年(卷),期】2014(022)016【总页数】3页(P88-90)【关键词】米散射;气溶胶;微脉冲;激光雷达;Fernald【作者】柳云雷;李华;陈玉宝;高玉春【作者单位】成都信息工程学院电子工程学院,四川成都610225;中国气象局气象探测中心,北京100081;大连市气象装备保障中心山东大连116001;中国气象局气象探测中心,北京100081;中国气象局气象探测中心,北京100081【正文语种】中文【中图分类】TN99激光雷达(Light Detection And Ranging,LiDAR)是一种拥有较高时空分辨率的主动式现代光学遥感设备,以激光器作为辐射源,光电探测器为接收器件,光学望远镜为天线,通过探测激光与目标物相互作用而产生的辐射信号来遥感目标物的一种雷达。
它具有高分辨率、抗干扰能力强、结构简单、易于操作等优点,可用来进行精细测距、测速、测角,还可进行超低空飞行目标的跟踪,同时由于其结构简单小巧,便于隐蔽,在军事技术装备中也得到较为广泛的应用[1]。
在气象方面激光雷达主要用于研究测量和观察地球大气的物理和化学特性以及一些大气现象,内容主要有大气气体成分浓度、气溶胶、温度、湿度、压力、风场、大气涡流、蒸发、云、辐射、大气能见度等[2]。
1 米散射激光雷达探测原理激光雷达探测原理主要是以脉冲激光器作为光源,向大气中发射高功率的窄脉冲激光束,当激光照射气溶胶时产生散射现象,利用光学望远镜收集散射的回波信号进行能量或光谱分析,还可将回波信号进行光电转换后送入计算机进行数据处理,从而获得大气参量的高度分布[3]。

激光雷达测气溶胶消光系数实验研究摘要:大气气溶胶影响着天气和气候的变化,通过用激光雷达对水平大气中的气溶胶进展连续观测,得到大气气溶胶浓度的高度分布数据,用Klett法反演和斜率法得到了气溶胶消光系数数值并利用MATLAB程序用计算机对所得实验数据快速方便地直接得出出测量结果和图示。
关键词:气溶胶;激光雷达;探测;Klett反演算法;斜率法;消光系数;MATLAB0 前言本文为米散射激光雷达测大气气溶胶消光系数的研究报告,包含激光雷达的原理、斜率法等内容。
大气气溶胶是指悬浮在大气中的固体和〔或〕液体微粒,气溶胶的X围很广,如地面的扬尘、烟粒、微生物、植物的孢子和花粉以与水和冰组成的云雾滴、冰晶和雨雪等粒子,都属于气溶胶。
除了自然界自然产生的气溶胶粒子以外,人为排放到大气内的污染气体等也会最终形成为气溶胶粒子。
气溶胶粒子会直接和间接地影响着气候,通过吸收和散射太阳辐射以与地球的长波辐射而影响着地球和大气的辐射收支,凝结成核参与云的形成,从而影响到天气和气候的变化。
[1]另外,大气气溶胶的浓度变化还会直接影响到人们的健康和生存环境[2]。
激光雷达是一种主动的遥感探测工具,已有多年的历史,已广泛应用于激光大气传输、全球气候预测、气溶胶辐射效应与大气环境等研究领域[3]。
激光雷达探空方法是向大气中发射激光束〔微米波〕,利用大气中的气溶胶或大气分子为媒介,进展大气遥感探测。
由于激光的波长较短且脉冲的宽度窄,故可进展全大气层内的高精度与高时空分辨率探测。
数十年来,激光技术的不断开展为激光雷达大气气溶胶探测提供了所需要的光源。
另一方面,信号探测和数据采集极其控制技术的开展使激光雷达在大气气溶胶的探测高度、空间分辨率、时间上的连续监测和测量精度等方面具有全面的优势,是其他探测手段不能比拟的[4]。
1 研究目的与背景大气中,尘埃、烟雾、云团等气溶胶粒子对大气的化学过程、辐射平衡、气候变化乃至人们的日常生活都有着非常重要的影响。
基于1064nm米散射激光雷达的大气消光特性的研究杨昭;李强;孙东松【摘要】介绍了一台自行研制的1064nm微脉冲米散射激光雷达的总体结构、技术参数及其工作原理.给出了具体探测的实验结果,推算出系统的几何重叠因子,根据激光雷达方程的反演方法,得出了大气气溶胶消光系数随高度变化的垂直分布廓线图.该激光雷达系统在夜晚的探测高度可达5km左右.通过激光雷达系统的日夜连续监测,可得到消光系数随高度及时间变化的三维分布图,对于进一步研究大气气溶胶的浓度、分布、散射及吸收特性都具有重要的意义.【期刊名称】《激光技术》【年(卷),期】2006(030)002【总页数】4页(P170-173)【关键词】激光技术;微脉冲激光雷达;气溶胶;反演法;消光系数【作者】杨昭;李强;孙东松【作者单位】连云港师范高等专科学校,物理系,连云港,222006;连云港师范高等专科学校,物理系,连云港,222006;北京航空航天大学,仪器科学与光电工程学院,北京,100083【正文语种】中文【中图分类】TN958.98引言激光雷达是传统的雷达技术与现代激光技术相结合的产物,是以光频工作的雷达。
1960年激光问世以后的40多年来,随着激光技术日新月异的发展以及先进的信号探测和数据采集系统的应用,激光雷达凭借其高测量精度、精细的时间和空间分辨率以及大的探测跨度成为一种重要的主动遥感工具。
常见的米散射激光雷达是利用激光作为电磁辐射源,通过探测激光与大气相互作用的辐射信号来遥感大气的[1]。
根据测得的原始数据,可推演出许多重要的大气参数指标。
作者建立了1台1064nm单波长米散射微脉冲激光雷达,用于探测对流层气溶胶消光系数随高度的空间分布。
本文中主要介绍该激光雷达的总体结构、技术参数及其工作原理,给出了具体测量的实验结果并对其进行了进一步的分析和讨论。
1 系统结构及技术参数该激光雷达系统分为4个单元:激光发射单元、信号接收单元、探测单元及数据采集单元。
大气中气溶胶激光雷达探测技术研究气溶胶是大气中的悬浮物质,由颗粒物、液滴、固体烟尘等组成。
气溶胶对大气环境和气候变化有着重要的影响。
在气溶胶研究中,激光雷达技术被广泛应用于气溶胶的探测和监测。
大气中的气溶胶粒子非常微小,直径一般在几纳米到几十微米之间,使得粒子的监测变得困难。
传统的气溶胶监测方法主要包括采样与化学分析、遥感监测和地面光学仪器观测等。
然而,这些方法均存在着采样时间长、操作复杂、成本高昂等问题。
激光雷达技术的应用可以克服传统气溶胶监测方法的不足之处。
激光雷达利用激光束在大气中传输,当激光束遇到气溶胶粒子时,会发生散射现象。
通过探测散射光的强度和方向,可以得到气溶胶粒子的属性信息,如粒子的浓度、粒径分布、形状等。
大气中气溶胶激光雷达探测技术的研究主要包括探测器设计、数据处理和气溶胶反演等方面。
探测器设计是激光雷达技术研究的关键环节之一。
探测器的优化设计可以提高激光雷达的灵敏度和分辨率,使其能够更好地探测气溶胶粒子的属性。
此外,数据处理也是激光雷达技术的重要组成部分。
通过有效的数据处理算法,可以提取出气溶胶散射光的特征,并将其转化为气溶胶的属性信息。
气溶胶反演是激光雷达技术研究的核心内容之一。
通过对散射光的特征进行反演,可以得到气溶胶的浓度、粒径分布等重要参数。
在大气中气溶胶激光雷达探测技术的应用研究中,目前存在一些挑战需要克服。
首先,由于气溶胶粒子的复杂性质,如不均匀分布、光学特性的变化等,激光雷达技术对气溶胶的探测存在一定的误差。
其次,由于大气条件的变化,如湿度、温度等因素的影响,也会对激光雷达技术的探测结果产生一定的干扰。
此外,气溶胶激光雷达探测技术在细粒子的监测上还有待进一步提高。
为了克服这些挑战,研究人员正在不断努力改进气溶胶激光雷达探测技术。
一方面,他们致力于优化激光雷达的探测器设计,提高雷达的探测灵敏度和分辨率。
另一方面,他们也在研究和发展新的数据处理算法,提高激光雷达对气溶胶属性信息的提取能力。
Raman雷达测量气溶胶消光系数文章主要介绍了激光雷达的原理和气溶胶的概念,阐述了Raman激光雷达探测气溶胶消光系数的基本原理和计算步骤,分析得出气溶胶消光系数的变化与气溶胶的垂直分布,并对其中可能产生的误差及该探测方法的优缺点做一简要分析讨论。
标签:激光雷达;Raman散射;气溶胶消光系数1 研究背景激光雷达在近50年来应用日趋变大,作为一种较为便利、可探测的时间分辨率及空间分辨率较高的主动遥感探测工具和技术,已被运用于很多方面,主要包括地理、物理、生物、天文、军事等,也是一种对大气的探测和检测十分有效的技术。
随着人类的进步和工业的发展,工业排放的固液态微小粒子不断进入到大气中,使大气气溶胶的含量日益增长,由于气溶胶对天气气候和人类的生存有着非常密切的联系,所以如何检测大气气溶胶的含量并有效的控制在当下已经成为一个很重要的任务。
而其中多种对气溶胶光学特性的观察方法中目前最为成型并且利用广泛的应属利用Raman激光雷达进行观测,本文将基于众学者的研究成果继续开展Raman激光雷达对气溶胶消光系数的研究。
2 气溶胶的定义气溶胶粒子是悬浮于大气中的多种固态和液态的微小颗粒物,其直径大小在0.001μm到0.1μm之间。
气溶胶颗粒主要有固态和液态两种,其中固态颗粒的气溶胶被称作烟,液态颗粒的气溶胶被称作雾。
气溶胶在对天气系统的影响中有很重要的作用,它主要能够从两个方面影响天气和气候。
一方面它可以将太阳光反射到太空中,使大氣降温,同时也降低大气能见度,另一方面能通过微粒的散射、漫反射以及吸收一部分的太阳辐射,减少地面长波辐射向太空的辐射,从而使大气升温。
另外,气溶胶进入大气中成为水滴和冰晶的凝结核,在符合一定条件后将会形成降雨和降雪等天气现象,这也是天气预报的主要内容之一,如果不能很好的预报到一些关键地区关键时间的降水情况甚至有可能会导致一些灾难的发生。
3 Raman激光雷达概述3.1 激光雷达激光雷达是一种主动式光学遥感设备,其光源是激光,这种装置遥感大气的基本原理是探测大气与激光之间互相影响的辐射信号。
专利名称:一种用于扫描大气气溶胶的激光雷达系统专利类型:发明专利
发明人:卜令兵,董平夷
申请号:CN201910433380.0
申请日:20190523
公开号:CN110045392A
公开日:
20190723
专利内容由知识产权出版社提供
摘要:本发明公开了一种用于扫描大气气溶胶的激光雷达系统,包括主控系统以及由主控系统控制的发射系统和接收系统;该激光雷达系统还包括、扫描平台、方位角步进电机、俯仰角步进电机、步进电机控制器;望远镜固定设于雷达外壳内部、上端开口位置处;激光器固定设于雷达外壳上,激光光轴与望远镜中心轴线平行;方位角步进电机的输出轴垂直设置,且与扫描平台固定相连;俯仰角步进电机为两个,置于扫描平台上方,且输出轴分别与雷达外壳两侧相连;主控系统通过步进电机控制器分别与方位角步进电机、俯仰角步进电机相连。
本发明能够高精度地实现在不同情况下设定的扫描模式,对三维空间内分布的气溶胶自动进行体扫。
申请人:南京信息工程大学
地址:210044 江苏省南京市江北新区宁六路219号
国籍:CN
代理机构:南京汇盛专利商标事务所(普通合伙)
代理人:张立荣
更多信息请下载全文后查看。
专利名称:一种全天时准确测量大气温度和气溶胶参数的激光雷达系统
专利类型:发明专利
发明人:易帆,翁淼,柳付超,张云鹏,余长明,何裕金,谭莹,易洋,潘向亮
申请号:CN201710001666.2
申请日:20170103
公开号:CN106772438A
公开日:
20170531
专利内容由知识产权出版社提供
摘要:本发明公开了一种全天时准确测量大气温度和气溶胶参数的激光雷达系统。
系统包括发射单元、光学接收与信号检测单元和控制单元。
发射单元采用种子注入的固体激光器输出极窄线宽的532.23 nm激光并导向天顶;光学接收与信号检测单元收集大气物质后向散射光,同时提取弹性回波信号及N分子Anti‑Stokes纯转动Raman谱=6和16的两支单谱线信号;控制单元保障整个雷达系统自动有序工作。
本发明的激光雷达系统具备全天时工作能力,且具备更高的测温精度,可实现对大气温度和气溶胶消光系数、体后向散射系数的同时准确测量。
申请人:武汉大学
地址:430072 湖北省武汉市武昌区珞珈山武汉大学
国籍:CN
代理机构:武汉科皓知识产权代理事务所(特殊普通合伙)
更多信息请下载全文后查看。
第15卷 第12期强激光与粒子束Vol.15,No.12 2003年12月HIGH POWER LASER AND PAR TICL E B EAMS Dec.,2003 文章编号:100124322(2003)1221145203探测大气气溶胶消光系数的便携式米散射激光雷达Ξ钟志庆1,2, 周 军1, 戚福弟1, 范爱媛1, 岳古明1, 兰举生1, 江庆伍1(1.中国科学院安徽光学精密机械研究所,安徽合肥230031;2.中国科学院研究生院,北京100039) 摘 要: 介绍了一种新型的便携式米散射激光雷达的总体结构及其各部分的功能,分析讨论了该激光雷达在夜晚与白天探测大气气溶胶消光系数垂直廓线的性能。
其夜晚的探测高度达到15km左右,白天的探测高度达到10km左右。
还可对卷云进行探测,获得卷云的厚度及其峰值消光系数。
该激光雷达具有结构紧凑、体积小、重量轻、自动化程度高、探测速度快等优点。
关键词: 便携式米散射激光雷达; 气溶胶; 消光系数; 卷云 中图分类号:TN958.98 文献标识码:A 激光雷达作为一种主动遥感探测工具已经有30多年的历史[1],已广泛应用于激光大气传输、全球气候预测、气溶胶辐射效应及大气环境等研究领域[2,3]。
随着激光技术、光学机械加工技术、信号探测、数据采集及其控制技术的发展,激光雷达技术的发展也日新月异。
我们研制出一种新型的便携式米散射激光雷达,其关键器件都采用轻小型全固化结构或模块化结构,加上独特的发射和接收光学单元,具有结构紧凑、体积小、重量轻、自动化程度高、探测速度快等优点,可应用于大气水平能见度的探测[4]和大气气溶胶消光系数垂直廓线的探测。
本文介绍了该激光雷达的总体结构及其各部分的功能,对其探测的532nm波长大气气溶胶消光系数垂直廓线结果进行了分析和讨论。
1 便携式米散射激光雷达的结构 便携式米散射激光雷达结构示意图见图1。
它由激光发射单元、回波信号接收单元、后继光学单元、信号探测和数据采集单元及控制单元五部分组成。
其主要技术参数见表1。
水平或垂直方向上的测量。
接收望远镜是由中国科学院安徽光学精密机械研究所生产的直径为200mm的Cassegrain型望远镜,主Ξ第七届全国激光科学技术青年学术交流会优秀论文。
收稿日期:2003209212; 修订日期:2003210217作者简介:钟志庆(19762),女,博士研究生,从事Doppler测风激光雷达的研究;合肥市1125信箱二室;E2mail:zqzhong@。
镜和副镜均镀532nm 波长全反的介质膜,反射率达99%。
后继光学单元中的目镜由K9玻璃制成,镀有532nm 增透膜,它将来自接收望远镜焦点后的发散光会聚成平行光,光斑直径10mm 。
由于在整个对流层的高度范围里,激光雷达接收到的532nm 波长大气后向散射回波信号的动态范围达到7个数量级以上,而A/D 卡的精度是12bit ,不能采集这么大的动态范围的信号;同时,近距离的大气后向散射光很强,会导致光电倍增管饱和引起信号失真,所以通过分束片1将大气后向散射光分成远近两个通道同时进行探测。
对于远距离探测通道,被分束片1反射的90%的大气后向散射光通过滤光片5进入带门控的光电倍增管进行光电转换。
对于近距离探测通道,从分束片1透过的10%的大气后向散射光经全反镜2反射,再通过衰减片3、滤光片4后进入光电倍增管进行光电转换。
两个通道的电信号经过双通道放大器放大后由双通道A/D 卡采集,最后由工控机对采集的数据进行储存,并实时显示测量数据。
2 便携式米散射激光雷达的几何重叠因子Fig.2 Overlap function of the portable Mie lidar 图2 便携式米散射激光雷达的几何重叠因子 便携式米散射激光雷达是一个双轴系统,发射的激光光束是逐步进入激光雷达的接收视场,近距离大气后向散射光并不是完全被接收,所以需要通过几何重叠因子来修正近距离的大气后向散射光。
使用合适的几何重叠因子对解决激光雷达探测信号动态范围大的问题是非常有利的。
几何重叠因子可通过实验获得[5,6]。
选择大气干净,能见度高并且水平大气均匀的夜晚,激光雷达呈水平指向,发射2000发激光脉冲,对采集的大气回波信号进行处理后得到该激光雷达的几何重叠因子如图2所示。
从图2中可以看出,该激光雷达有比较长的几何重叠因子,到0.8km 处,几何重叠因子才等于1,表明发射的激光光束开始全部进入接收望远镜的视场内。
在远距离处,由于接收的大气后向散射回波信号的信噪比小,回波信号的起伏较大,但几何重叠因子基本上围绕1上下变化。
3 大气气溶胶消光系数垂直廓线的探测Fig.3 Comparison of the aerosol extinction profiles measured by portable mie lidar and L300lidar at night 图3 便携式米散射激光雷达与L300激光雷达夜晚探测的大气气溶胶消光系数的垂直廓线比较 为了检验便携式米散射激光雷达探测大气气溶胶消光系数的性能及其可靠性,2003年1月23日晚20:00,我们进行了大气气溶胶消光系数垂直廓线的探测,并与另一台L300米散射激光雷达在同一时间的探测结果进行了比较。
图3给出了便携式米散射激光雷达(实曲线)和L300米散射激光雷达(虚曲线)同时探测的532nm 波长气溶胶消光系数垂直廓线。
图中的点划线是大气分子Rayleigh 消光系数垂直廓线。
可以看出,两台激光雷达探测的对流层气溶胶消光系数垂直廓线是较为一致的,同一高度区域上细微的结构也基本相似。
图4给出了便携式米散射激光雷达于2003年3月21日晚19:33探测的532nm 波长气溶胶和卷云的消光系数垂直廓线。
可以看出,当晚的大气具有明显的边界层结构,高度约为1km ;同时可以明显地看到在9.7km 有一层厚度为1km 的卷云,云峰值消光系数达到0.09km -1。
图5也给出了该激光雷达于2003年4月16日上午10:05探测的532nm 波长气溶胶消光系数垂直廓线(实曲6411强激光与粒子束第15卷线)。
可以看出当天的对流层气溶胶具有相当丰富的多层结构。
表明该激光雷达具有很强的白天探测大气气溶胶消光系数垂直分布的能力。
该天白天的探测高度达到10km 左右。
Fig.4 Aerosol and cirrus extinction profiles measuredby portable Mie lidar during nighttime 图4 便携式米散射激光雷达夜晚探测到的大气气溶胶和卷云消光系数的垂直郭线Fig.5 Aerosol extinction profiles measured by portable Mie lidar during daytime图5 便携式米散射激光雷达白天探测到的大气气溶胶消光系数的垂直郭线4 结 论 新型的便携式米散射激光雷达采用轻小型模块化设计,具有结构紧凑、体积小、重量轻和探测速度快等优点。
可以在夜晚和白天进行大气水平能见度的探测和532nm 波长大气气溶胶消光系数垂直廓线的探测,白天的探测高度达到10km 左右,夜晚的探测高度达到15km 左右。
参考文献:[1] Spinhirne J D.Micro pulse lidar[J ].I EEE Trans Remote Sensi ng ,1993,31:48—54.[2] Zhou J ,Yue G M ,Jin C J ,et al.Lidar observation of asian dust over hefei in the spring of 2000[A ].Proceedings of Asian Lidar Observation Net 2work Conference 2000[C].2000.29—32.[3] 周军,岳古明,金传佳,等.探测对流层气溶胶的双波长米氏散射激光雷达[J ].光学学报,2000,20(10):1412—1417.(Zhou J ,Yue G M ,JinC J ,et al.Two 2wavelength Mie lidar for monitoring of tropospheric aerosol.Acta Optica Si nica ,2002,20(10):1412—1417)[4] Werner C.Slant range visibility determination from lidar signatures by the two 2point method [J ].Optics and L aser Technology ,1981,27—36.[5] K ikuro T ,Chikara H ,K ouichiro M ,et al.Experimental determination of the crossover function in the laser radar equation for days with a light mist[J ].A pplied Optics ,1989,28:2194—2196.[6] Sasano Y ,Shimizu H ,Takeuchi N ,et al.G eometrical form factor in the laser radar equation :an experimental determination[J ].A pplied Optics ,1979,18:3908—3910.Portable Mie lidar for monitoring atmospheric aerosol extinctionZHON G Zhi 2qing 1,2, ZHOU J un 1, Q I Fu 2di 1, FAN Ai 2yuan 1, YU E Gu 2ming 1, LAN J u 2sheng 1, J IAN G Qing 2wu 1(1.A nhui Institute of Optics and Fine Mechanics ,the Chinese Academy of Sciences ,P.O.Box 1125,Hef ei 230031,China ;2.Graduate School of the Chinese Academy of Sciences ,Beijing 100039,China ) Abstract : A portable Mie lidar has been developed for both daytime and nighttime aerosol measurements.The overall structure and specifications of the portable Mie lidar are described.The primary observational aerosol extinction profiles at 532nm are also present 2ed and discussed in this paper.Signals detected by portable Mie lidar can reach about 25km at nighttime and 15km at daytime.It can al 2so be used to measure the thickness and peak extinction value of cirrus. K ey w ords : Portable Mie lidar ; Aerosol ; Extinction coefficient ; Cirrus7411第12期 钟志庆等:探测大气气溶胶消光系数的便携式米散射激光雷达。