自动控制原理(胥布工)第二版 (2)
- 格式:docx
- 大小:13.38 KB
- 文档页数:4

第1章习题答案1-1 解:自动控制系统:被控对象和控制装置的总体;被控对象:要求实现自动控制的机器、设备和生产过程;扰动:除给定值之外,引起被控制量变化的各种外界因素;给定值:作用于控制系统输入端,并作为控制依据的物理量;反馈:将输出量直接或间接的送到输入端,并与之相比较,使系统按其差值进行调节,使偏差减小或消除。
1-2 解:开环控制有洗衣机的洗衣过程,闭环控制有抽水马桶的蓄水控制、电冰箱制冷系统等。
1-3 解:1-4 解:a与d相连,b与c相连即可;系统原理框图如下所示:1-5 解:系统原理框图如下所示:1-6 解:对控制系统的基本要求是稳定性、准确性和快速性:稳定性是系统正常工作的前提条件;准确性反映控制系统的控制精度,要求过渡过程结束后,系统的稳态误差越小越好;快速性是要求系统的响应速度快,过渡过程时间短,超调量小。
1-7 解:该系统的任务是使工作机械(被控对象)的转角θc(被控量)自动跟踪手柄给定角度θr(给定量)的变化。
该系统的工作原理是:检测电位计与给定电位计的电气特性相同,工作机械的转角θc经检测电位计转换成电压u c,手柄给定角度θr经给定电位计转换成给定电压u r,u c与u r接入放大器前端的电桥。
当工作机械转角θc没有跟踪手柄给定角度θr时,u c与u r两者不相等而产生偏差Δu=u r-u c,Δu经过放大器放大,使电动机转动,通过减速器使得负载产生减小偏差的转动。
当检测电位计检测并转换的u c与u r相等,此时Δu=u r-u c=0,电动机不转,工作机械停在当前位置。
其原理框图如下图所示。
1-8 解:谷物湿度控制系统原理框图如下。
该系统的被控量是谷物湿度,给定量是希望的谷物湿度。
谷物加湿后的实时湿度经湿度检测后送到调节器,若与希望的湿度产生偏差,则通过调节器控制给水阀门的开大或关小,以减小两者的偏差。
谷物在入口端的湿度由前馈通道输入到调节器。
这样若入口处谷物湿度较大,则会使得偏差减小,从而减小阀门的开度;若谷物干燥,会增大偏差,从而加大阀门的开度。
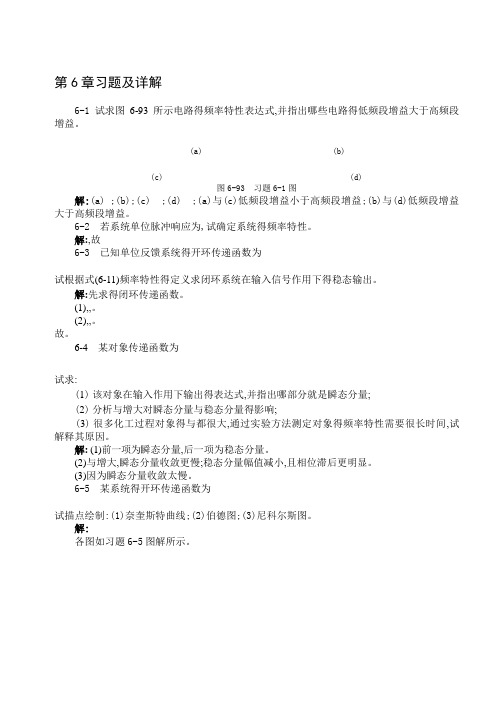
第6章习题及详解6-1 试求图6-93所示电路得频率特性表达式,并指出哪些电路得低频段增益大于高频段增益。
(a) (b)(c) (d)图6-93 习题6-1图解:(a) ;(b);(c) ;(d) ;(a)与(c)低频段增益小于高频段增益;(b)与(d)低频段增益大于高频段增益。
6-2 若系统单位脉冲响应为,试确定系统得频率特性。
解:,故6-3 已知单位反馈系统得开环传递函数为试根据式(6-11)频率特性得定义求闭环系统在输入信号作用下得稳态输出。
解:先求得闭环传递函数。
(1),,。
(2),,。
故。
6-4 某对象传递函数为试求:(1)该对象在输入作用下输出得表达式,并指出哪部分就是瞬态分量;(2)分析与增大对瞬态分量与稳态分量得影响;(3)很多化工过程对象得与都很大,通过实验方法测定对象得频率特性需要很长时间,试解释其原因。
解: (1)前一项为瞬态分量,后一项为稳态分量。
(2)与增大,瞬态分量收敛更慢;稳态分量幅值减小,且相位滞后更明显。
(3)因为瞬态分量收敛太慢。
6-5 某系统得开环传递函数为试描点绘制:(1)奈奎斯特曲线;(2)伯德图;(3)尼科尔斯图。
解:各图如习题6-5图解所示。
Nichols ChartOpen-Loop P hase (deg)O p e n -L o o p G a i n (d B )习题6-5图解6-6 给定反馈系统得开环传递函数如下, (a ); (b ); (c ); (d );(e )。
(1) 试分别绘出其开环频率特性得奈奎斯特草图,并与借助Matlab 绘制得精确奈奎斯特曲线进行比较。
(2) 试根据草图判断各系统得稳定性。
解:(1)精确曲线如习题6-6图解所示。
习题6-6图解(2)(a)临界稳定(闭环系统有一对共轭虚根),其余系统稳定。
6-7 给定反馈系统得开环传递函数如下, (a );(b ) ;(c );(d );(1) 试绘出各系统得开环对数幅频渐近特性,并根据所得得渐近特性估算截止频率与相位裕度。

第二章 过程装备控制基础本章内容:简单过程控制系统的设计复杂控制系统的结构、特点及应用。
第一节 被控对象的特性一、被控对象的数学描述(一) 单容液位对象1.有自衡特性的单容对象2.无自衡特性的单容对象(二) 双容液位对象1.典型结构:双容水槽如图2-5所示。
图2-5 双容液位对象 图2-6 二阶对象特性曲线2.平衡关系:水槽1的动态平衡关系为:3.二阶被控对象:1222122221)(Q K h dt dh T T dth d T T ⨯=+++式(2-18)就是描述图2-5所示双容水槽被控对象的二阶微分方程式。
称二阶被控对象。
二、被控对象的特性参数(一)放大系数K(又称静态增益)(二)时间常数T(三)滞后时间τ(1).传递滞后τ0(或纯滞后):(2).容量滞后τc可知τ=τ0+τc。
三、对象特性的实验测定对象特性的求取方法通常有两种:1.数学方法2.实验测定法(一)响应曲线法:(二)脉冲响应法第二节单回路控制系统定义:(又称简单控制系统),是指由一个被控对象、一个检测元件及变送器、一个调节器和一个执行器所构成的闭合系统。
一、单回路控制系统的设计设计步骤:1.了解被控对象2.了解被控对象的动静态特性及工艺过程、设备等3.确定控制方案4.整定调节器的参数(一)被控变量的选择(二)操纵变量的选择(三)检测变送环节的影响(四)执行器的影响二、调节器的调节规律1.概念调节器的输出信号随输入信号变化的规律。
2.类型位式、比例、积分、微分。
(一)位式调节规律1.双位调节2.具有中间区的双位调节3.其他 三位或更多位的调节。
(二)比例调节规律(P )1.比例放大倍数(K )2.比例度δ3.比例度对过渡过程的影响(如图2-24所示)4.调节作用比例调节能较为迅速地克服干扰的影响,使系统很快地稳定下来。
通常适用于干扰少扰动幅度小、符合变化不大、滞后较小或者控制精度要求不高的场合。
(三)比例积分调节规律(PI )1.积分调节规律(I )(1)概念:调节器输出信号的变化量与输入偏差的积分成正比⎰⎰==∆t I t I dt t e T dt t e K t u 00)(1)()(式中:K I 为积分速度,T I 为积分时间。
⾃动控制原理部分习题参考答案胥布⼯《⾃动控制原理》部分习题参考答案第1章1-4 有差系统。
1-5 接线端1接地,2与4相连,3接地,5不需连接。
1-8 (1)略;(2)⽆差系统。
第2章2-1 (a) 1)(1)()()()(G 222111221212211221210+++++++==s C R C R C R s C C R R s C R C R s C C R R s U s U s i (b) 212211 2120111)()()(G C C s C LC C Lss C s C s C s U s U s i ++=++== (c) s C R s C R C R C R s C C R R s U s U s i 111323122213201)()()()(G ++++-== (d )sC R s C R C R s C C R s U s U s i 2121112212101)()()()(G +++-== 2-2 (a )1)(1)()()()(12221122121221122121+++++++==s k f k f k f s k k f f s k fk f s k k f f s Y s Y s G i o (b )k s f f Ms s F s Y s G o +++==)(1)()()(212 2-3 )()()()()()(1221222122N N l s l s J J l ls M s s G =+++==ββθ2-4 )1)(1()()()(G 221122++==s C R s C R R s Q s H s i ,其中,1R 和2R 分别为在各⾃⼯作点的参数(液阻)。
2-5 1)()()()(G 2212112212122++++==s C R C R C R s C C R R R s Q s H s i ,其中,1R 和2R 分别为在各⾃⼯作点的参数(液阻)。
自动控制原理(胥布工)第二版
引言
自动控制是现代工程技术的重要组成部分,它广泛应用于工业生产、交通运输、电力系统、自动化设备等领域。
自动控制原理是理解和应用自动控制技术的基础,掌握自动控制原理可以帮助我们设计和优化控制系统,提高工作效率和质量。
本文档介绍了《自动控制原理(胥布工)第二版》的内容和主要特点,希望能帮助读者更好地理解自动控制原理,并应用于实际工程中。
内容概述
《自动控制原理(胥布工)第二版》全书共分为八章,分别介绍了控制系统的基本概念、数学模型和信号流图、系统的稳定性和脉冲响应、系统的频率特性和频域分析、系统的校正和稳态误差、系统的动态性能和根轨迹分析、系统的校正与稳态误差、系统的稳态误差。
第一章是引言章节,主要介绍了自动控制的概念、发展历程以及控制系统的重要性。
第二章介绍了控制系统的数学模型和信号流图,为后续章节的讲解打下基础。
第三章是关于控制系统稳定性和脉冲响应的内容,介绍了系统的稳定性判据和脉冲响应的分析方法。
第四章介绍了系统的频率特性和频域分析,包括频率响应曲线的绘制和系统频率特性的分析方法。
第五章主要讲解了系统的校正和稳态误差,包括校正方法和稳态误差的计算。
第六章介绍了系统的动态性能和根轨迹分析,包括系统的快速响应性能和稳定性分析方法。
第七章介绍了系统的校正与稳态误差,重点介绍了系统校正的设计方法和稳态误差的计算。
第八章是关于系统的稳态误差的内容,介绍了不同类型系统的稳态误差分析方法和校正技术。
特点和亮点
《自动控制原理(胥布工)第二版》具有以下特点和亮点:
1.理论与实践结合:本书在讲解自动控制原理的基础
理论的同时,注重实践应用。
通过大量的实际案例和实验分析,读者可以更好地理解控制原理的应用。
2.图文并茂:全书配有丰富的图例和实例,有助于读
者理解和记忆控制原理的概念和方法。
3.编排合理:本书章节编排合理,内容连贯且层次清
晰,从基本概念到实际应用,循序渐进,易于对知识的理解和掌握。
4.注重实用性:本书不仅讲解了自动控制原理的基础
知识,还给出了实际工程中的具体应用和解决方案,帮助读者更好地应用控制原理解决实际问题。
结语
《自动控制原理(胥布工)第二版》是一本系统全面介绍自动控制原理的教材,旨在帮助读者掌握控制原理的基本理论和应用技术。
通过学习本书,读者可以深入了解自动控制原理的内涵,提升自己在自动控制领域的能力。
无论是控制工程师、自动化专业学生,还是对自动控制感兴趣的读者,本书都是一本值得阅读和参考的优秀教材。
希望
读者能够通过学习本书,掌握自动控制原理,提升自己的技术水平,并在实际工程中有效地应用自动控制技术。