七自由度主动空气悬架最优控制的研究
- 格式:pdf
- 大小:226.81 KB
- 文档页数:3
7自由度主动悬架整车模型最优控制的研究
盛云;吴光强
【期刊名称】《汽车技术》
【年(卷),期】2007(000)006
【摘要】应用汽车系统动力学理论,建立了七自由度主动悬架的动力学模型.根据线性二次型最优控制原理设计了主动悬架线性二次型(LQR)控制器,并构建了实现该控制策略的主动悬架控制仿真模型.仿真结果表明:对主动悬架进行最优控制,能够有效地降低车身垂直振动加速度、车身侧倾角加速度和俯仰角加速度.
【总页数】5页(P12-16)
【作者】盛云;吴光强
【作者单位】同济大学;同济大学
【正文语种】中文
【中图分类】U463.33
【相关文献】
1.基于遗传算法的车辆4自由度主动悬架最优控制研究 [J], 蓝会立;高远;范健文;罗文广;许伟
2.具有LQG控制器的主动悬架整车模型动力学分析与仿真研究 [J], 张海涛;王治平;王云霞;王小龙;
3.主动悬架最优控制整车模型的研究 [J], 董波
4.基于最优控制的四自由度汽车主动悬架控制器 [J], 汤靖;高翔
5.二自由度汽车磁流变半主动悬架最优控制仿真研究 [J], 贾永枢
因版权原因,仅展示原文概要,查看原文内容请购买。
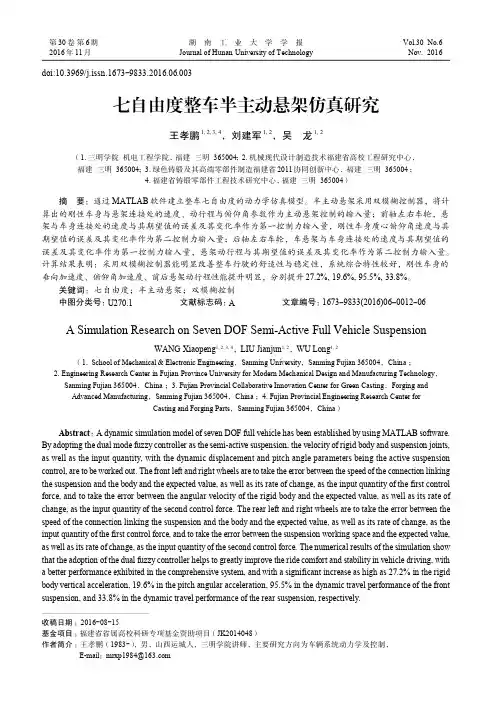
七自由度整车半主动悬架仿真研究王孝鹏1, 2, 3, 4,刘建军1, 2,吴龙1, 2(1. 三明学院机电工程学院,福建三明365004;2. 机械现代设计制造技术福建省高校工程研究中心,福建三明365004;3. 绿色铸锻及其高端零部件制造福建省2011协同创新中心,福建三明365004 ;4. 福建省铸锻零部件工程技术研究中心,福建三明365004)摘要:通过MATLAB 软件建立整车七自由度的动力学仿真模型。
半主动悬架采用双模糊控制器,将计算出的刚性车身与悬架连接处的速度、动行程与俯仰角参数作为主动悬架控制的输入量;前轴左右车轮,悬架与车身连接处的速度与其期望值的误差及其变化率作为第一控制力输入量,刚性车身质心俯仰角速度与其期望值的误差及其变化率作为第二控制力输入量;后轴左右车轮,车悬架与车身连接处的速度与其期望值的误差及其变化率作为第一控制力输入量,悬架动行程与其期望值的误差及其变化率作为第二控制力输入量。
计算结果表明:采用双模糊控制器能明显改善整车行驶的舒适性与稳定性,系统综合特性较好,刚性车身的垂向加速度、俯仰角加速度、前后悬架动行程性能提升明显,分别提升27.2%, 19.6%, 95.5%, 33.8%。
关键词:七自由度;半主动悬架;双模糊控制中图分类号:U270.1 文献标志码:A文章编号:1673-9833(2016)06-0012-06A Simulation Research on Seven DOF Semi-Active Full Vehicle SuspensionWANG Xiaopeng 1, 2, 3, 4,LIU Jianjun 1, 2,WU Long 1, 2(1. School of Mechanical & Electronic Engineering ,Sanming University ,Sanming Fujian 365004,China ;2. Engineering Research Center in Fujian Province University for Modern Mechanical Design and Manufacturing Technology ,Sanming Fujian 365004,China ;3. Fujian Provincial Collaborative Innovation Center for Green Casting ,Forging andAdvanced Manufacturing ,Sanming Fujian 365004,China ;4. Fujian Provincial Engineering Research Center forCasting and Forging Parts ,Sanming Fujian 365004,China )Abstract :A dynamic simulation model of seven DOF full vehicle has been established by using MATLAB software.By adopting the dual mode fuzzy controller as the semi-active suspension, the velocity of rigid body and suspension joints,as well as the input quantity, with the dynamic displacement and pitch angle parameters being the active suspension control, are to be worked out. The front left and right wheels are to take the error between the speed of the connection linking the suspension and the body and the expected value, as well as its rate of change, as the input quantity of the first control force, and to take the error between the angular velocity of the rigid body and the expected value, as well as its rate of change, as the input quantity of the second control force. The rear left and right wheels are to take the error between the speed of the connection linking the suspension and the body and the expected value, as well as its rate of change, as the input quantity of the first control force, and to take the error between the suspension working space and the expected value,as well as its rate of change, as the input quantity of the second control force. The numerical results of the simulation show that the adoption of the dual fuzzy controller helps to greatly improve the ride comfort and stability in vehicle driving, with a better performance exhibited in the comprehensive system, and with a significant increase as high as 27.2% in the rigid body vertical acceleration, 19.6% in the pitch angular acceleration, 95.5% in the dynamic travel performance of the front suspension, and 33.8% in the dynamic travel performance of the rear suspension, respectively.收稿日期:2016-08-15基金项目:福建省省属高校科研专项基金资助项目(JK2014048)作者简介:王孝鹏(1983-),男,山西运城人,三明学院讲师,主要研究方向为车辆系统动力学及控制,E-mail :mrxp1984@湖南工业大学学报Journal of Hunan University of Technology Vol.30No.6Nov.2016第30卷 第6期2016年11月doi:10.3969/j.issn.1673-9833.2016.06.003第6期130引言在对悬架系统的研究中,二自由度悬架模型与四自由度1/2整车模型在文献中引用较多[1-5]。
空气悬挂系统的精确控制技术随着汽车技术的不断进步,空气悬挂系统作为一项先进的技术应用于汽车行业,并在一些高端汽车中得到了广泛应用。
空气悬挂系统可以通过对悬架系统的精确控制,提供更加舒适和稳定的行驶体验。
本文将就空气悬挂系统的精确控制技术进行探讨。
一、空气悬挂系统简介空气悬挂系统是一种通过气压调节车辆的悬挂高度的技术。
与传统的弹簧悬挂系统相比,空气悬挂系统可以通过改变气压来调节悬挂系统的硬度,从而适应不同路况和载重情况。
空气悬挂系统由气泵、空气容器、空气减震器和控制系统等组成。
二、精确控制技术的重要性精确控制技术是空气悬挂系统的核心,它可以根据车辆当前的行驶状态和驾驶员的需求,实现对悬挂系统的精确控制,从而提供更好的悬挂性能和驾驶体验。
精确控制技术可以使车辆行驶时保持较低的车身姿态,减小风阻并提高车辆的稳定性,同时在通过颠簸路段时能实现对车身的保护。
三、传感器技术精确控制空气悬挂系统首先需要对车辆的行驶状态进行实时监测和反馈。
传感器技术在该方面扮演着重要的角色。
通过安装在车辆各个关键部位的传感器,可以实时监测车身的倾斜角度、加速度、车速等参数,并将这些数据传输给控制系统。
四、控制算法空气悬挂系统的控制算法是精确控制的关键。
通过对传感器数据的处理和分析,控制算法可以实现对悬挂系统气压的精确控制。
根据车辆的行驶状态和驾驶员的需求,控制算法可以实时调整悬挂系统的硬度,提供最佳的悬挂性能。
五、电磁阀技术电磁阀技术是空气悬挂系统中的关键技术之一。
电磁阀可以控制气压的进出,从而实现对悬挂系统气压的精确控制。
电磁阀的开关速度和响应时间对系统的控制精度有重要影响,因此需要选用高质量的电磁阀,并确保其稳定可靠的性能。
六、控制系统的设计一个优秀的空气悬挂系统必须有一个先进的控制系统。
控制系统负责接收传感器的数据,并通过控制算法处理后输出控制信号。
控制系统需要具备高速、高精度的计算和响应能力,以确保对悬挂系统的精确控制。

关于主动式汽车空气悬架的控制技术研究
解福泉
【期刊名称】《交通标准化》
【年(卷),期】2006(000)008
【摘要】主动式空气悬架作为汽车悬架的一门新技术,其应用越来越为广泛.从空气悬架的发展历史入手,介绍该系统的组成及系统的功能和控制原理,并在此基础上引用目标状态及状态基准,提出基于反应式的状态映射控制方法,可为今后相关方面的深入研究奠定基础.
【总页数】4页(P138-141)
【作者】解福泉
【作者单位】河南交通职业技术学院,河南,郑州,450005
【正文语种】中文
【中图分类】U4
【相关文献】
1.汽车半主动空气悬架参数自调整模糊控制 [J], 郑明军;林逸;陈潇凯
2.汽车半主动空气悬架自适应模糊神经网络控制 [J], 姜立标;王薇;谢东;崔胜民;王登峰
3.基于分数阶微积分的汽车空气悬架半主动控制 [J], 吴光强;黄焕军;叶光湖
4.面向主动配电网的电动汽车充放电功率控制技术研究 [J], 郑杰; 胡华锋; 肖鹏; 李刚; 徐小涵; 潘哲哲
5.基于模糊PID控制重型汽车主动空气悬架仿真分析 [J], 周雅倩;鲁力群;孙法军;王毅;孙萌;李辉
因版权原因,仅展示原文概要,查看原文内容请购买。
空气悬挂控制算法1.引言1.1 概述空气悬挂技术是指通过在车辆悬挂系统中引入空气弹簧和电磁阀等装置,以实现对车辆悬挂高度的精确控制。
相比传统的机械悬挂系统,空气悬挂技术能够利用气压调节车身高度,进而提供更加舒适的乘坐体验和更好的悬挂性能。
为了实现对空气悬挂系统的精确控制,需要使用特定的算法进行辅助。
空气悬挂控制算法是指通过对悬挂系统中的空气泵、阀门和传感器等元件进行控制,以实现对悬挂高度、硬度和稳定性等参数的实时调节和控制。
在空气悬挂控制算法中,需要考虑的因素包括车辆的负载情况、行驶速度、路况等。
算法会通过悬挂系统中的传感器获取这些数据,并根据预设的控制策略进行实时调整。
例如,在行驶过程中,当车辆遇到不平的路面时,算法会根据传感器获取的数据,自动调整悬挂高度和硬度,以保证乘坐的舒适性和悬挂系统的稳定性。
空气悬挂控制算法的研究旨在优化悬挂系统的性能,提升车辆的操控性和乘坐舒适性。
通过精确调整悬挂参数,可以有效地减少车辆在行驶过程中的颠簸感,提高车辆的稳定性和操控性,同时对于不同的用途和需求,也可以根据实际情况进行个性化的设置。
在本篇文章中,我们将介绍空气悬挂技术的基本原理和应用,重点介绍空气悬挂控制算法的设计原则和常用方法。
通过对现有算法的分析和比较,我们旨在为读者提供一个全面了解空气悬挂控制算法的基础,并为未来的研究和应用提供一些参考和启发。
同时,本文也将探讨目前空气悬挂控制算法存在的挑战和改进方向,展望未来在这一领域的发展前景。
通过深入研究和创新,相信空气悬挂技术在汽车工程领域将有更广阔的应用前景。
文章结构部分的内容应该包括对整篇文章的组织和章节安排进行说明。
可以按照如下方式来编写文章1.2 文章结构部分的内容:文章结构部分的主要目的是介绍整篇文章的组织架构,以便读者能够清楚地了解整个文章的结构。
本文主要分为引言、正文和结论三个部分。
引言部分包括概述、文章结构和目的三个小节。
在概述部分,将引入空气悬挂控制算法的背景和重要性。
汽车主动悬架系统的研究开发进展综述陈军;欧家福;罗显政;刘德辉【摘要】阐述了汽车各类主动悬架系统的特点及应用情况,介绍了各种控制策略及其优缺点,指出了汽车主动悬架系统的发展趋势和应用前景,提出了主动悬架系统研究开发方面的建议.【期刊名称】《汽车零部件》【年(卷),期】2010(000)002【总页数】4页(P64-67)【关键词】主动悬架系统;控制策略;发展趋势;研究开发建议【作者】陈军;欧家福;罗显政;刘德辉【作者单位】中国汽车工程研究院,重庆,400039;中国汽车工程研究院,重庆,400039;中国汽车工程研究院,重庆,400039;中国汽车工程研究院,重庆,400039【正文语种】中文0 引言传统的被动悬架具有固定的悬架刚度和阻尼系数,设计的出发点是在满足汽车平顺性和操纵稳定性之间进行折衷。
被动悬架在设计和工艺上得到不断改善,实现了低成本、高可靠性的目标,但无法彻底解决平顺性和操纵稳定性之间的矛盾。
20世纪50年代产生了主动悬架的概念,这种悬架在不同的使用条件下具有不同的弹簧刚度和减振器阻尼。
它能够根据悬架质量的加速度,主动地控制汽车的振动,能同时满足平顺性要求和操纵稳定性要求。
自20世纪70年代以来,随着电液控制、计算机技术的发展,传感器、微处理器以及电、液控制元件制造技术的提高以及成本的降低,出现了能够根据汽车行驶的路面、工况和载荷等情况来控制自身工作状态,使汽车的平顺性和操纵稳定性达到最佳的主动悬架系统。
1 汽车主动悬架的分类汽车悬架可分为被动悬架和主动悬架。
主动悬架根据控制方式,可分为半主动悬架、慢主动悬架和全主动悬架。
目前,主动悬架的研究主要集中在控制策略和执行器的研发两个方面。
图1所示为上述各种悬架系统的结构示意图,其中Ks代表悬架弹性元件刚度,Kt代表轮胎等效刚度,C0代表减振器阻尼,M代表主动装置,Ma 代表非悬挂质量,Mb代表悬挂质量。
图1 各类悬架结构示意图1.1 半主动悬架半主动悬架系统介于被动悬架系统和全主动悬架系统之间,它只消耗少量的能量,可进行刚度或阻尼控制;半主动悬架比全主动悬架结构简单、成本低;自20世纪90年代以来,半主动悬架系统已较为广泛地使用在高级汽车和军用汽车上。
车辆主动悬架的控制研究悬架是汽车的重要装置之一,它对汽车的平顺性、操纵稳定性、通过性等多种使用性能有着很大的影响。
设计优良的悬架系统,对提高汽车产品质量有着极其重要的意义。
目前,汽车上普遍采用的是弹性元件和减震器组成的常规悬架,从控制力学的角度,将这种悬架称为被动悬架。
实践和研究结果都表明,常规悬架受到许多限制,即使采用优化方法来设计也只是将其性能改善到一定程度。
为了克服常规悬架对其性能改善的限制,在汽车中采用和发展了新型的主动悬架。
主动悬架能够根据路面情况及汽车运行的实际状态进行最优反馈控制,使汽车整体行驶性能达到最佳。
主动悬架的主要特点是能够主动提供能量,与传统被动悬架相比,其最大的优点在于具有高度的自适应性。
一、车辆主动悬架系统建模主动悬架的分析模型如图 3.3所示,图中u为主动悬架执行机构的作用力。
主动悬架的运动微分方程为:⎪⎩⎪⎨⎧---==)(01..11..22x x k u x m u x m t (1)状态变量、输出向量的选取同被动悬架,且为了便于与被动悬架的比较分析,选取与被动悬架模型相同的输入信号,路面激励仍为选白噪声)(t ω,根据微分方程组(1),建立如下所示的状态方程和输出方程 ⎪⎩⎪⎨⎧+=++=Eu Cx y t D Bu Ax x )(ω。
(2)式中:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--=0001000000010101m k A t ;⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=121010m m B ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0100D ;⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=010*********C ;⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=0012m E汽车悬架可认为是一种连续线性的随机最优控制系统,由最优线性滤波器串接确定性调节器的最优反馈增益系数矩阵组成。
这两部分参数可分别加以确定。
对于控制要求的性能指标是二次函数积分型的调节器问题,外界干扰是高斯白噪声,综合性能指标为:dt t u t R t u t X t Q t X u J T T ⎰∞+=0)]()()()()()([)( (3)此处认为汽车主动悬架的最优控制器为一个终端时间无限的线性调节器,问题仍是寻找最优控制)(t u ,使目标函数J 取极小。