三维尺寸视觉测量系统
- 格式:pdf
- 大小:224.46 KB
- 文档页数:4
3d视觉测量原理
3D视觉测量原理是一种非接触式的测量方法,它利用相机成像技术获取物体表面的三维坐标信息,实现对物体的尺寸、形状、位置等参数的精确测量。
在3D视觉测量中,相机使用光学镜头将物体的图像投影到图像传感器上,然后通过图像处理算法将图像转换为三维坐标信息。
这个过程被称为三维重建。
为了实现精确的测量,3D视觉测量系统通常需要进行相机标定和误差校正。
相机标定是指确定相机内部参数和外部参数的过程,通过这个过程可以计算出相机成像的几何模型,从而准确地将图像信息转换为物体表面的三维坐标。
误差校正则是指对影响测量精度的因素进行补偿,如镜头畸变、光照不均匀等。
基于3D视觉测量原理,可以实现许多应用,如3D打印、机器人导航、工业检测等。
它具有非接触式、高精度、高效率等优点,正在逐渐替代传统的测量方法,成为工业制造和科研领域的重要技术。
- 1 -。
测绘技术中如何进行三维视觉测量三维视觉测量作为测绘技术中的一个重要分支,用于获取三维空间中目标物体的几何形状、位置和姿态信息,具有广泛的应用领域。
本文将介绍三维视觉测量的原理、方法和应用,并讨论测绘技术中如何进行三维视觉测量。
一、三维视觉测量的原理三维视觉测量基于计算机视觉和图像处理技术,通过对多幅或多个视角的图像进行分析和处理,获取目标物体的三维信息。
其原理主要包括立体视觉几何、图像匹配和三维重建等。
立体视觉几何是三维视觉测量的基础,通过分析目标物体在多个视角下的图像,确定图像之间的对应关系,从而计算出目标物体的三维坐标。
图像匹配是指在多个视角的图像中找到对应的特征点或区域,将其通过几何变换关系进行匹配,得到目标物体在不同视角下的表面点云。
三维重建是基于图像匹配的结果,通过三维坐标的计算和数据处理技术,生成目标物体的三维模型。
二、三维视觉测量的方法三维视觉测量可以采用多种方法,包括立体匹配、结构光投影、激光扫描和摄像测量等。
立体匹配是最常用的三维视觉测量方法之一,通过对多个视角的图像进行匹配,获取目标物体的三维坐标。
该方法需要相机标定、特征提取和匹配算法等步骤,具有较高的测量精度和稳定性。
结构光投影是一种通过投影特殊图案或光栅来测量物体形状和表面细节的方法。
它利用结构光和相机的关系,通过图像处理和三维重建算法,得到目标物体的三维坐标和形状信息。
该方法适用于表面光滑的物体,具有测量速度快、适用范围广的优点。
激光扫描是一种通过激光束扫描物体表面得到三维坐标的方法。
它利用激光器发射激光束,通过对物体反射的激光进行检测和计算,获取物体表面的三维坐标。
激光扫描具有高精度、全自动化和非接触式等特点,适用于复杂形状的物体测量。
摄像测量是利用相机进行三维测量的一种方法,通过对物体的图像进行处理和分析,获取物体的三维坐标和形状信息。
它可以使用单目或多目相机,根据相机标定和图像处理算法,得到目标物体的三维模型。
摄像测量适用于大范围、复杂形状的物体测量,具有成本低、操作简便的优点。
三维面形测量系统的基本原理三维面形测量系统是用于测量物体表面形状和几何尺寸的一种技术。
其基本原理是通过光学、激光、摄像等方式将物体表面上的点或曲线形状信息转换为数字信号,然后通过处理和分析这些数字信号,最终得到物体的三维形状和几何尺寸。
在三维面形测量系统中,光学或激光技术是常用的测量原理之一、光学技术利用投影测量和成像原理,通过将光束投射到物体表面并接收反射或散射的光来确定物体表面形状。
光线的投影和接收可以通过使用相机或其他光学装置进行。
光学技术可分为白光投影法、干涉投影法、多光束投射法等。
白光投影法是使用彩色光源投射多个不同颜色的光束到物体表面,并通过相机或其他探测器收集反射光。
通过测量不同颜色光束之间的偏差,可以计算出物体表面上各点的高度差,从而构建出物体的三维形状。
干涉投影法利用干涉原理,在物体表面上投射一束激光和参考光束,并通过光的干涉现象来测量物体表面的形状。
激光通过物体表面后,与参考光束进行干涉,产生干涉带纹理。
通过记录干涉带的图像并进行分析,可以计算出物体表面上各点的高度差,从而得到三维形状。
摄像技术是另一种常用的测量原理,通过相机记录物体表面投影图像,并通过分析图像来推断物体的三维形状。
在摄像技术中,常用的方法有结构光投影和立体视觉。
结构光投影利用光条或光栅对物体表面进行投影,并通过相机记录投影图像。
根据投影图像中的形变信息,可以计算出物体表面上各点的三维坐标。
结构光投影方法通常使用激光扫描或投影仪进行。
立体视觉利用相机组成的立体视觉系统来记录物体表面的多个视角图像,并通过相机之间的视差信息来计算物体表面上各点的三维坐标。
立体视觉方法通常需要对相机进行校准,以获得准确的视差测量结果。
除了光学和摄像技术,还有其他一些三维面形测量方法,如激光雷达、电容测量、激光干涉计等。
这些方法的原理基本上是通过测量物体表面上点或曲线的位置、形变或电容值等来反推物体的三维形状。
总之,三维面形测量系统的基本原理是通过光学、激光、摄像等方式将物体的表面形状信息转换为数字信号,并通过处理和分析这些数字信号,最终得到物体的三维形状和几何尺寸。

3D机器视觉技术测量原理有哪些3D机器视觉技术是一种通过摄像机、传感器和计算机算法来获取并分析三维物体形状和结构信息的技术。
它在工业自动化、计算机辅助设计、医疗领域等各个领域都具有广泛的应用。
以下是几种常见的3D机器视觉技术测量原理。
1. 立体视觉(Stereo Vision)立体视觉是最常见也是最直观的一种3D测量技术。
它通过两个或多个摄像机同时拍摄同一场景的不同角度图像,然后通过计算机算法对图像进行处理,推算出物体的深度信息。
这种方法适用于静态场景,可以测量物体的尺寸、形状和位置等。
2. 相位测量(Phase Measurement)相位测量是一种基于物体表面的纹理或结构的光学变化来获取物体三维形状的方法。
它通过光源照射物体,使用相机记录物体表面的相位变化,然后根据相位变化来推算物体的高度信息。
这种方法精度较高,通常用于测量物体表面的细节特征,比如凹凸不平的物体表面。
3. 结构光投影(Structured Light Projection)结构光投影是一种利用投影仪投射特定的光纹或光斑到物体表面上,通过相机记录被投射光纹或光斑的畸变情况,进而推算物体的三维形状的方法。
这种方法常见的有线条结构光和格雷代码结构光。
它适用于不同尺寸和形状的物体,测量速度较快且精度较高。
4. 飞行时间法(Time-of-Flight)飞行时间法是一种通过计算光线从光源到物体表面再反射回相机所需的时间来推算物体的距离的方法。
它通过发送一个短脉冲光束,记录光束与物体表面的相互作用时间,然后根据光的速度推算出物体的距离。
这种方法在测量远距离和大尺寸物体上具有优势,但由于光传播速度受环境和表面材料的影响,精度相对较低。
以上是几种常见的3D机器视觉技术测量原理。
根据不同的应用需求和实际场景,可以选择合适的测量原理来获取物体的三维形状和结构信息。
车身三维尺寸视觉检测系统班级:自动化4班姓名:马晓明学号:30112031501.引言随着车辆在中国的普及,越来越多的家庭会拥有属于自己的轿车,但是车辆事故也不可避免的随之而来。
很多车主在发生一些小事故后会很自然的开去修理厂进行修理,但是目前中国大多数的修理厂只会进行一些简单的人工测量与修理,并不能对车辆进行科学,精准的测量与评估,因此会导致很多二次事故。
车辆发生事故后,如果采用简单的人工测量和修理,车辆在以后使用中还可能出现跑偏,共振,轮胎非正常磨损等故障,造成严重的生命财产损失。
但是如果我们采用车身三维尺寸视觉检测系统就可避免这些后续事故。
不仅如此,该视觉检测系统同样可以用于汽车生产现场,检测出场汽车是否满足质量要求。
这一技术的应用不仅能快速检测大量汽车样品,而且能节约很多人力,降低生产成本。
2.车身三维尺寸视觉检测原理典型的车身三维尺寸视觉检测系统原理如图所示。
该系统包括多个视觉传感器,全局校准,现场控制,测量软件等几部分。
每个视觉传感器是一个测量单元,对应车身上的一个被测点,系统组建时,所有的传感器均已统一到基准坐标系下( 即系统全局校准) ,传感器由系统中的计算机控制。
测量时,每个传感器测量相应点的三维坐标,并转换到基准坐标系中,全部传感器给出车身所有被测点的测量结果,完成系统测量任务。
3. 视觉检测系统步骤(1)图像获取双台相机获取:可有不同位置关系(2)相机标定确定空间坐标系中物体点同它在图像平面上像点之间的对应关系。
a)内部参数:相机内部几何、光学参数b)外部参数:相机坐标系与世界坐标系的转换(3)图像预处理和特征提取预处理:主要包括图像对比度的增强、随机噪声的去除、滤波和图像的增强、伪彩色处理等;特征提取:常用的匹配特征主要有点状特征、线状特征和区域特征等(4)立体匹配:根据对所选特征的计算,建立特征之间的对应关系,将同一个空间物理点在不同图像中的映像点对应起来。
立体匹配有三个基本的步骤组成:a)从立体图像对中的一幅图像如左图上选择与实际物理结构相应的图像特征;b)在另一幅图像如右图中确定出同一物理结构的对应图像特征;c)确定这两个特征之间的相对位置,得到视差。
三维激光扫描测量系统基本介绍三维测量可定义为“一种具有可作三个方向移动的探测器,可在三个相互垂直的导轨上移动,此探测器以接触或非接触等方式传送讯号,三个轴的位移测量系统经数据处理器或计算机等计算出工件的各点坐标(X、Y、Z)及各项功能的测量”。
三维测量的测量功能应包括尺寸精度、定位精度、几何精度及轮廓精度等。
2三维测量方式1)将被测物体置于三坐标测量空间,可获得被测物体上各测点的坐标位置,这项技术就是三坐标测量机的原理。
三坐标测量机是测量和获得尺寸数据的最有效的方法之一,可以替代多种表面测量工具,减少复杂的测量任务所需的时间,为操作者提供关于生产过程状况的有用信息。
2)三维激光扫描仪是通过发射激光来扫描被测物,以获取被测物体表面的三维坐标。
三维激光扫描技术又被称为实景复制技术,具有高效率、高精度的测量优势。
有人说,三维激光扫描是继GPS技术以来测绘领域的又一次技术革命。
三维激光扫描仪被广泛应用于结构测量、建筑测量、船舶制造、铁路以及工程的建设等领域,近些年来,三维激光扫描仪已经从固定朝移动方向发展,最具代表性的就是车载三维激光扫描仪和机载三维激光雷达。
3)[1] 拍照式三维扫描仪采用一种结合结构光技术、相位测量技术、计算机视觉技术的复合三维非接触式测量技术。
这种测量原理,使得对物体进行照相测量成为可能。
所谓拍照测量,就是类似于照相机对视野内的物体进行照相,不同的是照相机摄取的是物体的二维图象,而研制的测量仪获得的是物体的三维信息。
3应用领域机械、汽车、航空、军工、家具、工具原型等测量高精度的几何零部件以及测量复杂形状的机械零部件。
三维测量技术的应用领域:最近几年,三维激光扫描技术不断发展并日渐成熟,目前三维扫描设备也逐渐商业化,三维激光扫描仪的巨大优势就在于可以快速扫描被测物体,不需反射棱镜即可直接获得高精度的扫描点云数据。
这样一来可以高效地对真实世界进行三维建模和虚拟重现。
因此,其已经成为当前研究的热点之一,并在文物数字化保护、土木工程、工业测量、自然灾害调查、数字城市地形可视化、城乡规划等领域有广泛的应用。
基于机器视觉的零件尺寸检测与测量系统设计随着工业生产的发展,对零件的质量与精度要求越来越高,而传统的人工尺寸检测与测量方法已经无法满足这些要求。
因此,基于机器视觉的零件尺寸检测与测量系统应运而生。
本文将针对这一问题进行探讨。
一、介绍机器视觉技术是一门利用计算机视觉进行模式识别、目标检测和三维重建等方面的技术。
基于机器视觉的零件尺寸检测与测量系统利用计算机视觉技术,可以实现对零件尺寸的高精度检测与测量。
二、系统设计1. 摄像设备选择在设计基于机器视觉的零件尺寸检测与测量系统时,首先需要选择合适的摄像设备。
一般来说,高分辨率的摄像头能够提供更精确的检测结果。
2. 图像采集与处理图像采集是系统中的核心环节之一,通过摄像设备采集零件的图像,并对图像进行处理,提取出需要检测的特征。
图像处理算法可以采用边缘检测、二值化、滤波等方法,以提高图像的清晰度和信噪比。
3. 特征提取与分析在图像处理的基础上,需要进一步提取出零件的特征信息。
可以通过边缘检测算法提取零件的轮廓信息,或者利用模板匹配的方法提取出关键特征点。
4. 尺寸计算与结果输出根据零件的特征信息,结合相应的几何测量原理,可以计算出零件的尺寸参数。
一般来说,可以计算出零件的长、宽、高等尺寸参数,以及一些特殊形状的测量参数。
三、系统优势基于机器视觉的零件尺寸检测与测量系统相比传统的人工测量方法具有以下优势:1. 精度高:机器视觉系统可以实现对零件尺寸的高精度测量,减少了人为因素对测量结果的影响。
2. 自动化程度高:系统可以实现对多个零件的自动化测量,减少了人工测量的工作量,提高了工作效率。
3. 可靠性好:机器视觉系统的测量结果可靠性高,可以避免人工测量过程中的主观误差。
4. 数据可视化:测量结果可以通过电脑显示进行直观展示与分析,方便人们对零件质量进行评估。
四、应用领域基于机器视觉的零件尺寸检测与测量系统在很多领域都有广泛的应用,例如汽车制造、航空航天、电子电气等行业。
视觉测量原理与方法
视觉测量原理与方法是一种基于相机和图像处理技术的测量手段,其核心原理是通过对图像进行分析和处理,来获取目标物体的空间位置和尺寸信息。
视觉测量方法可以分为两种主要类型:二维视觉测量和三维视觉测量。
二维视觉测量是指对目标物体在二维平面上的位置和尺寸进行测量。
其基本原理是通过相机拍摄目标物体的影像,然后利用图像处理算法来计算目标物体在图像上的位置和尺寸。
常用的二维视觉测量方法有边缘检测、模板匹配和特征提取等。
三维视觉测量是指对目标物体在三维空间中的位置和尺寸进行测量。
其基本原理是通过使用多个相机或者结构光等设备,同时拍摄目标物体的影像,然后利用视差或三角测量原理来计算目标物体的三维坐标。
常用的三维视觉测量方法有立体视觉测量、结构光测量和光栅投影等。
除了以上两种基本的视觉测量方法外,还有一些常用的辅助方法,如标定和校正。
标定是指通过使用特定的标定物体来确定相机的内部参数和外部参数,以便进行准确的测量。
校正是指对图像中的畸变进行修正,以提高测量的精度。
视觉测量在工业自动化、机器人导航、医学影像等领域都得到了广泛应用。
凭借其非接触、高精度、快速等特点,视觉测量成为了一种重要的测量手段。
随着图像处理算法和硬件技术的不断进步,视觉测量方法也在不断发展和完善。
三维测量技术发展现状及趋势
一、发展背景
随着社会的不断发展,科技的飞速进步,三维测量技术(3D Measurement)成为了现代工程的重要组成部分,在机械、精密仪器、现
代制造等领域发挥着重要作用。
三维测量技术又称为三维测量系统,它是
一种对物体的表面结构、形状、尺寸等参数进行测量的技术,可以帮助我
们了解物体的实际形态,为制造、质量控制、装配等一系列工程提供可靠
的数据。
二、发展概况
目前,三维测量技术发展迅速,技术多样化,可以应用于多个行业,
具有广阔的应用前景。
在技术装备方面,目前三维测量技术的发展门槛越
来越低,设备配件也越来越完善,使用起来既方便又实用;在测量方式上,三维测量技术也有了重大加快,测量效率也有了明显提高,这一切都使其
应用范围更为广泛,也更加稳定。
另外,三维测量技术在精度控制和测量
范围方面也取得了显著的成果,使其在精密仪器、航天航空航天、宏观表
面形成、精细加工等场合都得到了广泛应用。
三、发展趋势
从上述发展概况来看,三维测量技术未来发展态势为佳,具有区域性
便利与全球技术性协同的双重发展趋势,且越来越受到国内企业的重视。
首先,三维测量技术将不断拓展应用领域。
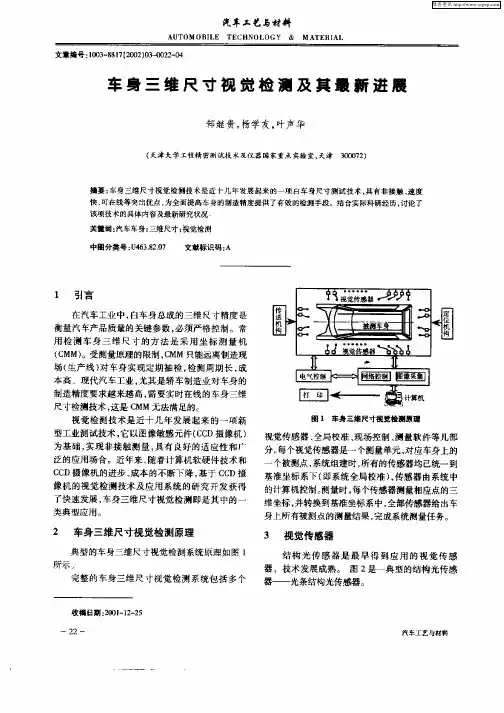
现代计量测试1999年第1期
三维尺寸视觉测量系统
邾继贵 王 王 仲 叶声华
(天津大学精密测试技术及仪器国家重点实验室,天津 300072)
摘要:视觉测量技术是一种先进的非接触测量手段,具有系统组成灵活、工作空间大、精度合适、自动化程度高等特点,非常适合工业现场的在线测量与质量监控。
本文分析视觉测量的原理及视觉测量系统的组成,研究了一个实际的视觉测量系统。
关键词:三维尺寸 视觉测量
0 引言
视觉测量是采用摄像机作为传感器件,借助计算机强大的数据处理能力实现对物体(物点)空间位置的测量。
较大规模的视觉测量系统一般由多个视觉传感器组成,以完成大空间范围内的测量,要解决的主要问题有视觉传感器的设计、传感器的局部标定和系统全局标定等。
如果被测空间较小,一个传感器应可以组成视觉测量系统,此时局部标定和全局标定是统一的。
视觉传感器的具体结构很灵活,由被测对象来决定,但它们的测量原理是一致的。
1 视觉测量原理
111 视觉传感器测量原理
本质上讲,视觉传感器是基于三角测量原理的,图1示出了光条传感器的测量原理。
图1 光条传感器测量原理由投射器投射出一个光平面,它与被测物体表
面相交形成光条,将物体表面与光条相交的某点记
为P w ,该点在摄像机象面上象点为P i 。
设摄像机坐
标系为OXYZ ,P i 在象面上的坐标为(x i ,y i ),P w 在
OXYZ 中的坐标为(x w ,y w ,z w ),图1中存在下列关
系x i =f x (x w ,y w ,z w )y i =f y (x w ,y w ,z w )(1)式中f x ,f y 是由摄象机成像模型所决定的函数。
如
果选择透视成像模型,则
f
x =x w z w f f y
=y w z w f 其中,f 为摄像机焦距。
此外,因为P w 在光平面内,所以存在如下约束
P(x w,y w,z w)=0(2)
P(x,y,z)为平面在OXYZ中的平面方程。
f x,f y,P(x,y,z)的具体形式可由传感器的局部标定获得。
由式(1)、(2)即可算出P w的坐标。
其它类型的视觉传感器,包括多光条传感器、双目传感器,它们的原理可以用类似的方法来分析。
112 视觉系统原理
由于单个视觉传感器的工作空间有限,因此,通常由多个视觉传感器组成一个较大工作空间的视觉测量系统,如图2所示。
图2 多传感器视觉测量系统在图2示出的系统中,每一个传感器的测量
结果都是在其自身的局部坐标系中得到的,必须
将这些局部坐标系下得到的测量结果统一到测量
坐标系下才有意义。
借助经纬仪可实现这种统一,
这就是视觉系统的全局标定。
设第i个传感器的局部坐标系为O i X i Y i Z i,系
统测量坐标系为O X Y Z,经纬仪坐标系为
O o X o Y o Z o,则
x o
y o
z o
=R o i
x i
y i
z i
+T o i(3)
x
y
z
=R o
x o
y o
z o
+T o(4)
式中R o i,T o i为坐标系O i X i Y i Z i到O o X o Y o Z o之间的旋转矩阵和平移矩阵,R o,T o为坐标系O o X o Y o Z o 到O X Y Z之间的旋转矩阵和平移矩阵,它们均通过经纬仪的全局标定获得。
于是
x
y
z
=R o R o i
x i
y i
z i
+R o T o i+T o(5)
通过上式就可以实现各个传感器的局部坐标系到系统测量坐标系之间的统一,如果测量系统只包含一个视觉传感器,那么全局标定就可以省略。
下面研究一个车身三维尺寸视觉测量系统。
2 车身三维尺寸视觉测量系统
汽车在生产过程中,需要对白车身(未喷漆前的已焊装好的车身)上的关键部位及关键点(如车围棱线,棱线上的点,车身上圆孔、锥角等特征点)进行检测,以鉴定生产线的焊装质量。
车身三维尺寸视觉测量系统可以在线、非接触、高效地完成这个任务。
该系统由多个视觉传感器组成,包括传感器系统、标定系统、机械系统、电气控制系统、计算机系统及测控软件几部分。
整个系统的工作示意图如图3所示。
211 视觉传感器系统
视觉传感器在整个系统中占有重要的地位,根据车身上被测点的具体特点,设计了三种类型的传感器,传感器原理图如图4所示。
图3 车身三维尺寸视觉测量系统工作示意图
图4 车身三维尺寸视觉测量系统中的传感器
21111 单光条传感器
由单光条投射器和摄像机组成,投射器投射的光平面和被测物体表面相交形成光条,分析光条在摄像机中的成像位置就可解算出被测物体表面上的点(和光平面相交部分)的空间位置。
该传感器用于测量车身棱线上点的空间坐标。
21112 多光条传感器
由多光条投射器和摄像机组成,可以一次投射多个光平面,因此能够同时测量多个被测物体表面上点的空间位置。
该传感器用于测量车身棱线(通过多个点的测量结果来解算)的空间位置。
21113 双目传感器
由左右两个摄像机组成,根据空间特征点(如圆孔等)在左右两个摄像机中的成像位置,可解得该点的空间坐标。
该传感器用于测量车身上特征点(圆孔、锥角等)的空间位置。
212 标定系统
标定系统包括传感器局部标定和系统全局标定两部分。
21211 局部标定
标定传感器的结构参数,包括摄像机参数,光平面和摄像机之间的空间关系,摄像机和摄像机之间的空间关系等。
21212 全局标定
标定组成系统的各个视觉传感器局部坐标系和视觉系统测量坐标系之间的空间关系,采用两
台经纬仪建立观测坐标系,通过靶标将各个传感器的局部坐标系统一到一个基准坐标系(视觉系统
测量坐标系)中。
213 机械系统
机械系统负责传感器的安装、被测车身的传动及定位。
214 电气控制系统
电气控制系统完成对机械运动机构的运动控制。
215 计算机系统
计算机系统提供一个计算、控制平台,它通过网络,在测量控制软件的作用下,实现对多个传感器的控制,并经过计算处理最终给出测量结果。
硬件控制原理如图5所示。
图5 计算机控制原理
216 测量控制软件
测量控制软件包括网络通讯模块、电气控制模块、传感器控制模块、图像分析模块、计算模块、交互式用户接口模块等,实现对系统的控制并给出测量结果。
3 结论
视觉测量具有非接触、高效、灵活等独特优点,非常适合于生产现场的在线测量与质量监控,是一种很有价值和前途的测量技术,这在实际应用中已得到充分的证明。
参考文献
1 邹定海.三维视觉检测系统研究及其ADC应用:[学位论文].天津:天津大学,1992.
2 罗明.多视觉检测系统标定方法的研究:[学位论文].天津:天津大学,1994.
V isi on M easu ring System fo r32D i m en si onal Sizes
Zhu J igu i,W ang Fang,W ang Zhong,Ye Shenghua
(State Key L ab of P recisi on M easu ring T echno logy and In strum en ts,T ian jin U n iv.,300072)
A b stract:V isi on m easu ring techno logy is an advanced non2con tact m easu ring m ethod w ith several characteristics such as flex ib le configu rati on,app rop riate p recisi on and h igh au tom ati on.It is very su itab le to the on2line m easu rem en t and quality m on ito r in the field of indu stry.T he p rinci p le and system configu rati on of visi on m easu rem en t are analyzed,and a p ractical visi on m easu ring system fo r32di m en si onal sizes are develop ed.
Key W o rds:32di m en si onal size,visi on m easu rem en t。