三坐标测量机综合误差测量不确定度
- 格式:doc
- 大小:105.50 KB
- 文档页数:4
测 量 不 确 定 度 报 告47BQD-01-20171目的为了验证产品角度尺寸与设计值的符合性,需要对产品的角度尺寸进行测量,三坐标测量机测量分辨率高是一种有效的测量设备。
根据JJF1059.1-2012《测量不确定度评定与表示》对三坐标测量机的角度测量进行测量不确定度评定。
2依据GB/T3177-2009 产品几何技术规范(GPS)光滑工件尺寸的检验 3适用范围用单一材料或层积材料制成的有一定刚性的产品,产品尺寸在设备测量范围以内。
4方法概要采用三坐标测量机对任意工件(本例中采用二级角度40°量块)在标准环境(温度20±2℃,湿度<65%)中,进行测量,在直角坐标系空间的有效量程上,记录三坐标测量机示值,各机器平面测量三次,得到9组读数,将读数作为测量结果。
5数学模型由测量的方式,建立数学模型如下:(采用40°的量块)i i T M = (i =1,2…9)式中:i M ——测量结果,i T ——三坐标测量机的读数 6使用的计量器具、标准物质和仪器设备① 三坐标测量机,该设备的分辨率为0.5μm ,假定三角分布,k =61/2 ② 三坐标测量机,该设备的校准证书指出最大允许示值误差(MPE E )为 8.0+7.5L/1000 (μm ) ,在本例中L ≤70mm ,得MPE E =8.525μm ,假定均匀分布,k =31/2;③ 三坐标测量机,该设备的校准证书指出最大允许探测误差(MPE P )为8.0μm,假定均匀分布,k=31/2。
④三坐标测量机,该设备说明中设备轴间垂直度允差为0.0005°,假定为均匀分布,k=31/2。
7测量结果M及典型值用40°角度量块进行9次测量结果如下:XY面YZ面ZX面读数1 读数2 读数3 读数4 读数5 读数6 读数7 读数8 读数9 40.0014 39.9987 40.0025 39.9995 40.0009 39.9971 39.9988 39.9980 39.9991 平均值: 39.9996°8不确定度分量的识别、分析和量化按照数学模型及方法概要,其不确定度来源有5方面:① M的测量重复性u1 (M)(8.1)②三坐标测量机的分辨率引入的标准不确定度u2 (M)(8.2)③三坐标测量机的最大允许示值误差引入的标准不确定度u3 (M)(8.3)④三坐标测量机的最大允许探测误差引入的标准不确定度u4(M)(8.4)⑤三坐标测量机的轴间垂直度允差引入的标准不确定度u(M) (8.5)58.1 测量重复性u1(M)用40°角度量块进行9次测量重复性,贝塞尔公式计算单次测量标准差s(M)=[∑M i2/(n-1)]1/2= 0.001726°u1(M)=s(M)/ 91/2= 0.0005754°8.2 设备的分辨率引入的标准不确定度u2(M)考虑设备在根据测点构造矢量时,因设备的示值误差±0.5μm会发生角度偏差,在L=70的长度内,设测点间距为60mm,角误差即为±0.0009549°,双矢量则为:±0.001910°,假定为三角分布,k=61/2,u2(M)=0.001910°/61/2=0.0007797°8.3 设备的最大允许示值误差引入的标准不确定度u3(M)设备的最大允许示值误差是MPE E=8.525μm, 同样在L=70的长度内,设测点间距为60mm,角误差即为:0.01628°,双矢量则为:0.03256°,假定均匀分布,k=31/2u3(M)=0.03256°/31/2=0.01880°8.4设备的最大允许探测误差引入的标准不确定度u4(M)设备的最大允许探测误差是MPE P =8μm, 同样在L=70的长度内,设测点间距为60mm,角误差即为:0.01528°,双矢量则为:0.03056°,假定均匀分布,k=31/2U4(M)=0.03056°/31/2=0.01764°8.5设备的轴间垂直度允差为0.0005°,考虑到有三轴存在,彼此无明显相关性,则合成允差为:(0.00052+0.00052+0.00052)1/2=0.0008660°假定为均匀分布,k=31/2U5(M)=0.0008660°/31/2=0.0005°9计算相对合成标准不确定度u cr(M)符号来源类别量值量序U1(M) 测量重复性A类0.0005754° 1U2(M)设备分辨率B类0.0007797° 2U3(M) 设备示值误差B类0.01880° 3U4(M) 设备探测误差B类0.01764° 4U5(M)垂直度允差B类0.0005° 5u c(M)=[∑u i2(M)]1/2=(0.0005752+0.00077972+0.018802+0.017642+0.00052)1/2=0.02581°10计算扩展不确定U(M)取k=2,U(M)=2×u c(M)=2×0.02581°=0.05162°11结果完整表达该量块的测量结果M=39.9996°U(M)=0.05162°, k=2编制人审核人批准人日期日期日期。
三坐标误差原因分析发布时间:2010-07-30注:三坐标误差分析本人摘自网络,感谢作者!时间:2010年7月30日三坐标误差分析,将产生原因归纳为测量方法误差、三坐标测量机设备误差、测量环境误差、测量人员误差、被测工件本身误差五个方面。
并指出要减少三坐标测量机测量误差,最大限度地发挥三坐标测量机能力,必须是三坐标测量机制造厂与用户之间密切配合,共同努力才能达到。
三坐标测量机虽然测量精度较普通量具测量准确得多,但必定存在测量误差。
因此,为了使三坐标测量机的测量结果最大限度地满足机械设计、制造、检验的需要,必须分析三坐标测量机测量误差产生的原因。
本文将三坐标测量机测量误差的原因归纳为测量方法误差、三坐标测量机设备误差、测量环境误差、测量人员误差和被测工件本身误差五个方面。
下面分别进行研究。
测量方法误差及解决措施三坐标测量机用于零件和部件的尺寸误差和形位误差的测量,特别对于形位误差测量更显示其高准确度、高效率、测量范围大的优点。
而形位误差的测量方法种类非常多,GB1958—80《形状和位置公差检测规定》中规定了形位误差有五种检测原则:与理想要素比较原则、测量坐标值原则、测量特征参数原则、测量跳动原则、控制实效原则。
并且还列出了100余种测量方法。
如果在测量形位误差时采用的检测原则不对,选用的方法不完善、不严密、不确切,便会造成测量方法误差。
因此,从事三坐标测量机工作的人,一定要熟悉测量方法,特别是对形位误差的五种检测原则和100余种测量方法要非常熟悉,才能减少测量方法误差。
三坐标测量机设备误差及解决措施任何一种三坐标测量机均存在误差,根据国标GB/T16857.2-1997(等效国际标准ISO10360—2-----1994)规定,将三坐标测量机的误差归纳为长度测量的示值误差E和探测误差R二类。
其中三坐标测量机长度测量的示值误差E是指用三坐标测量机测量长度实物标准器的两标称平行平面间的法向(与一个面正交)两相对点距离的示值误差,即测得长度与长度实物标准器长度真值之差,以微米计算,并以下列三个表达式的任一式表示:E=A+L/K≤BE=A+L/KE=B式中:A------常数项,由三坐标测量机制造厂提供,μm;L------被测长度,mm;K------无量纲常数,由三坐标测量机制造厂提供;B------E的最大值,由三坐标测量机制造厂提供,μm。
三坐标测量机的误差分析三坐标测量机误差分析概述三坐标测量机的静态误差来源主要有:三坐标测量机本⾝的误差,如导向机构的误差(直线、回转)、基准坐标系的变形、测头误差、标准量的误差;与测量条件相关联的各种因素引起的误差,如测量环境的影响(温度、尘埃等)、测量⽅法的影响以及⼀些不确定因素的影响等。
三坐标测量机的误差源纷繁复杂,很难将它们⼀⼀检测分离出来并加以修正,⼀般只修正那些对三坐标测量机精度影响⽐较⼤的误差源和那些⽐较容易分离的误差源。
⽬前研究最多的是三坐标测量机的机构误差。
⽣产实践中使⽤的三坐标测量机绝⼤多数是正交坐标系三坐标测量机,对于⼀般的三坐标测量机⽽⾔,机构误差主要是指直线运动部件误差,包括定位误差、直线度运动误差、⾓运动误差、以及垂直度误差。
三坐标测量机主要误差分析对三坐标测量机精度评定或实施误差修正,要以坐标测量机固有误差的模型为基础,其中,必须给出各误差项的定义,分析,传递及误差合成后的总误差。
所谓的总误差,在三坐标测量机的精度检定中,是指反映坐标测量机精度特性的综合误差,即指⽰精度,重复精度等:在三坐标测量机的误差修正技术中,则是指空间点的⽮量误差。
机构误差分析三坐标测量机的机构特征,导轨对被它引导的部件限制五个⾃由度,测量系统控制运动⽅向上的第六个⾃由度,因此导向部件在空间的位置,由导轨及其所属的测量系统确定。
测头误差分析三坐标测量机的测头分为两种:接触式测头按其结构⼜分为开关式(⼜称触发式或动态发讯式)和扫描式(⼜称⽐例式或静态发讯式)两⼤类。
开关式测头的误差由开关⾏程,测头各向异性,开关⾏程分散性,复位死区等引起。
扫描式测头的误差由测⼒⼀位移关系,位移⼀位移关系,交叉耦合⼲扰等引起。
测头的开关⾏程为测头与⼯件接触⾄测头发讯,测头所偏摆的⼀段距离。
这是测头的系统误差。
测头的各向异性是开关⾏程在各个⽅向上的不⼀致性。
它是系统误差,但通常作随机误差处理。
开关⾏程的分解性指重复测量时开关⾏程的离散程度。
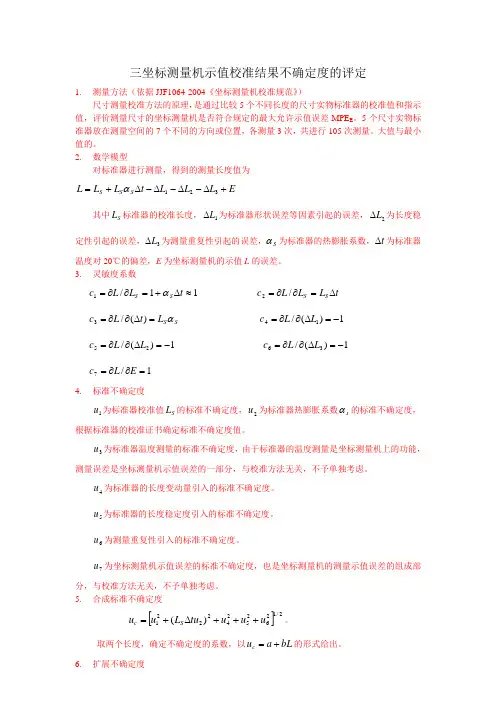
三坐标测量机示值校准结果不确定度的评定1. 测量方法(依据JJF1064-2004《坐标测量机校准规范》)尺寸测量校准方法的原理,是通过比较5个不同长度的尺寸实物标准器的校准值和指示值,评价测量尺寸的坐标测量机是否符合规定的最大允许示值误差MPE E 。
5个尺寸实物标准器放在测量空间的7个不同的方向或位置,各测量3次,共进行105次测量。
大值与最小值的。
2. 数学模型对标准器进行测量,得到的测量长度值为E L L L t L L L S S S +∆-∆-∆-∆+=321α其中S L 标准器的校准长度,1L ∆为标准器形状误差等因素引起的误差,2L ∆为长度稳定性引起的误差,3L ∆为测量重复性引起的误差,S α为标准器的热膨胀系数,t ∆为标准器温度对20℃的偏差,E 为坐标测量机的示值L 的误差。
3. 灵敏度系数11/1≈∆+=∂∂=t L L c S S α t L L L c S S ∆=∂∂=/2S S L t L c α=∆∂∂=)(/3 1)(/14-=∆∂∂=L L c1)(/25-=∆∂∂=L L c 1)(/36-=∆∂∂=L L c1/7=∂∂=E L c4. 标准不确定度1u 为标准器校准值S L 的标准不确定度,2u 为标准器热膨胀系数s α的标准不确定度,根据标准器的校准证书确定标准不确定度值。
3u 为标准器温度测量的标准不确定度,由于标准器的温度测量是坐标测量机上的功能,测量误差是坐标测量机示值误差的一部分,与校准方法无关,不予单独考虑。
4u 为标准器的长度变动量引入的标准不确定度。
5u 为标准器的长度稳定度引入的标准不确定度。
6u 为测量重复性引入的标准不确定度。
7u 为坐标测量机示值误差的标准不确定度,也是坐标测量机的测量示值误差的组成部分,与校准方法无关,不予单独考虑。
5. 合成标准不确定度[]2/12625242221)(u u u tu L u u S c +++∆+=。
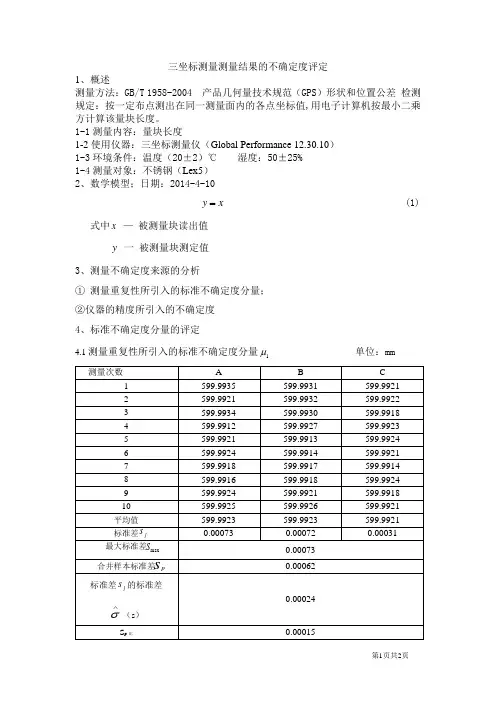
三坐标测量测量结果的不确定度评定1、概述测量方法:GB/T 1958-2004 产品几何量技术规范(GPS)形状和位置公差检测规定:按一定布点测出在同一测量面内的各点坐标值,用电子计算机按最小二乘方计算该量块长度。
1-1测量内容:量块长度1-2使用仪器:三坐标测量仪(Global Performance 12.30.10)1-3环境条件:温度(20±2)℃湿度:50±25%1-4测量对象:不锈钢(Lex5)2、数学模型;日期:2014-4-10y= (1)x式中x—被测量块读出值y一被测量块测定值3、测量不确定度来源的分析①测量重复性所引入的标准不确定度分量;②仪器的精度所引入的不确定度4、标准不确定度分量的评定μ单位:mm4.1测量重复性所引入的标准不确定度分量1合并样本标准差为:∑==mj p s s j m 121 =0.62μm (其中m=3)标准差j s 的标准差:1)(12)(-=∑-=∧m j s m j s s σ=0.24μm)1(2-=n S spP 比=0.15μm (其中n=10)如≤∧)(s σ S p 比,则可采用合并样本标准差Sp 来评定标准不确定度分量,反之,若子 )(s ∧σ>S p 比,则应采用Sj 中的最大值S max 来评定标准不确定度分量。
所以,1u =10/73.0=0.23μm自由度:)1(-=n m pν=)110(*3-=274.2仪器的精度所引入的不确定度2u仪器的示值误差为±2.8+3L/1000m μ按均匀分布 k=3 a=2.8+3*600/1000m μ(L 取值600mm)2u =66.23/≈a m μ2221μμ+=U =2266.223.0+=2.75m μ5.扩展不确定度取置信概率P=95%,, k 95=2 扩展不确定度U 95为U 95=k 95)(e U c ⨯=2⨯2.75≈5.51m μ 6.测量结果不确定度报告与表示三坐标测量该量块的长度为599.9922±0.00551mm报告审核: 报告编制:邓过房。
三坐标测量机测量不确定度评定摘要:三坐标测量机主要为工业设计、产品开发、加工制造以及质量检测等提供高精度的测量数据,但在应用时,我公司的三坐标测量机测量数据仅是被测参数接近真值的估测值,没有给出测量值的测量不确定度,不能高质量服务于高精尖产品的测量,本文主要对我公司三坐标测量机的不确定度进行评价。
三坐标测量机在测量中引起被测数值不确定度的因素有很多,不确定度可以分为随机不确定度和系统不确定度,在确定不确定度影响因素时,应从设备、人员、环境、方法及被测对象几个方面考虑。
关键词:不确定度、三坐标测量机、自由度概况本文参照规程JJF1059.1-2012《测量不确定度评定与表示》,使用海克斯康Micro Plus8106三坐标测量机,型号为GLOBAL PERFORMANCE8106,测量软件为QUINDOS7,设备规格为(800*1000*600)mm,本次重点研究三坐标测量机对标准环规直径测量的不确定度进行评定。
准确评定测量值与真值的误差,确定三坐标测量机的准确性和置信水准。
1、试验方案1.1试验条件试验环境温度为(202)C,温度变化每小时不应超过0.5℃/h,环境相对湿度为≤60%;将受测标准环规放置于实验室内的恒温时间为24小时以上,完全消除温度因素的影响。
1.2试验目的参照三坐标测量机操作规程及作业指导书,测量60mm3等标准环规的直径D,确定三坐标测量机的不确定度,对三坐标置信率进行评价。
1.3试验原理接触式,绝对测量。
1.4试验方法按设备操作要求按顺序开启软硬件,使三坐标测量机运行良好,参照三坐标测量机操作规程,选用三点法评价测量标准环规刻度线处的直径值D。
1.5注意事项试验前检查三坐标测量机及标准环规是否检定合格,试验开始时确保测头、标准环规无灰尘、油污的污染物,确保设备及被测件符合试验要求。
2、标准不确定度评定2.1由三坐标测量机本身测量误差引入的不确定度u1:6、实际应用与效果检查为某大学能源与动力工程学院参与的国家某重点项目提供气缸活塞配合间隙测量,通过对缸体与活塞的准确测量,借助本次研究成效对测量数据进行准确评定,提供高精度测量数据质量,为项目推进提供保障。
三坐标测量仪扫描法直径测量结果不确定度的评定摘要:三坐标测量仪精度高、应用范围广、能实现自动化测量,在精密尺寸测量中发挥巨大作用,但其在应用时,受到环境温度、测量方式等多种因素影响。
本文对蔡司标准球直径进行测量,分析三坐标测量仪测量结果中的误差来源,然后对测量数据进行较为科学的不确定度评定,提高测量结果的准确性和可靠性。
关键词:三坐标测量仪、扫描法、不确定度、直径测量三坐标测量仪作为精密尺寸测量设备,其测量精度高,结果准确,能实现自动化测量,大大提高测量效率[1,2]。
然而三坐标测量仪对测量结果要求较高,在进行精密测试时需考虑其测量数据是否准确。
测量过程中产生的误差不仅仅是由设备本身所带来的,通常还会受到测量环境温度、测量方式、被测对象等因素影响,导致测量值与真实值存在误差[3]。
杨胜华[4]提出三坐标测量仪误差来源于测量环境温度、震动、测量方式等准静态误差,仪器运动部件、导轨在测量时出现的动态误差;晁飞[5]提出除了环境温度外,还存在因为光栅材料的不均匀性,光栅系统操作困难等造成的光栅误差、零部件不匹配引起的装配误差。
测量不确定度表示由于测量误差的存在而对被测量值不能确定的程度,是评价测量结果质量的重要指标。
本文以蔡司公司提供的标准球为分析对象,使用三坐标测量仪对其进行直径测量,通过测量不确定度的评定对三坐标测量仪直径检测结果进行准确性和可靠性的评估[6]。
1 测量环境信息1.1 温湿度条件三坐标测量实验室内温度保持在18.0℃~22.0℃;湿度保持在40.0%~60%;压缩空气压力:0.5MPa。
1.2 设备信息仪器名称:三坐标测量仪规格型号:CONTURA 6206量程:X向0~900mm,Y向0~1200mm,Z向0~800mm长度测量最大允许误差MPE(E0.E150)≤1.8+L/350μm1.2 标准球信息Serial no. G-03786Material no.600332-8446-000Diameter 29.97418 mmMean radius 14.98709 mm1.3 测量方法将标准球固定在三坐标测量仪的大理石平面上,然后用三坐标测量仪扫描出球头形状,并在CAD模型中,将球头划分为4个90°的区域;测量程序设置为2个垂直的圆路径,以球形顶点为中点,测量角度为180°。
三坐标测量机校准装置建标技术要求及测量结果的不确定度评定文章摘要:随着经济建设的发展及外资企业的进入,三坐标测量机在许多三资企业、国有大中型企业及汽车零部件制造企业相继得到引进应用。
国内一些企业也生产各种不同精度、不同规格的三坐标测量机。
由于该种类型仪器的精度需要进行有效的实施监测,确保量值传递的准确性,才能使其在生产中发挥应有的作用,为此建立三坐标测量机校准装置是十分必要的。
关键词:三坐标测量机校准测量结果不确定度评定文章正文:三坐标测量机是现代精密加工中必不可少的精密测量设备,它不但可以完成常规二维坐标的测量,重要的是由于它的产生使得三维曲面的精确测量成为可能,特别是对复杂空间位置、空间曲面的测量不但可以成为可能,而且还可以通过CAD、CAM、CNC系统直接对加工机床进行加工过程的指导性控制。
由于它具有高精密度及由计算机系统控制的智能功能,因此被广泛应用于汽车、摩托车、航空航天、飞机制造及模具制造等加工业。
一、三坐标测量机校准装置计量标准的工作原理及其组成,根据JJF1064-2010《坐标测量机校准规范》,三坐标测量机示值误差校准方法和综合示值误差校准方法与原理如下:1、示值误差校准方法:按照JJF1064-2010的要求,采用激光干涉仪对三坐标测量机每一个坐标进行单独校准,并且要求在正、反行程方向进行校准。
原理如图1所示。
一、2、综合示值误差校准方法及原理:(1)单轴坐标综合示值误差的校准,将量块借助支撑架固定在平行于坐标轴线的任意位置,同时是处于工作行程的中间部位,原理如图2所示。
(2)空间综合示值误差的校准,将量块借助支撑架固定在三坐标测量机空间对角线方位的中间部位,这一检定分别在四个对角线进行,原理如如图3所示。
3、计量标准的组成:(1)激光干涉仪;(2)量块;(3)标准球。
二、三坐标测量机校准装置计量标准的主要技术指标1、激光干涉仪规格:XL-80测量范围:(0~80000)mmMPE:±(0.03+0.5L)μm2、量块(1)规格:30 mm、125mm、250mm、500mm、600mm、700mm、1000mm测量范围:(30~1000)mm等级:二等(2)规格:大八块测量范围:(125~500)mm等级:三等(3)规格:大五块测量范围:(600~1000)mm等级:三等3、标准球规格:Φ25mm、Φ19mm三、测量结果的不确定度评定1 概述1.1 测量方法:依据JJF1064-2010《坐标测量机校准规范》。
三坐标使用中常见测量误差初步分析摘要:作为一种常见的几何精密测量仪器,三坐标测量在对某些形位的公差进行测量时,在结果的重复性以及准确性方面存在较大的偏差。
鉴于此,本文就三坐标使用中常见测量误差初步分析展开探讨,以期为相关工作起到参考作用。
关键词:数据可靠;测量误差;原理1.坐标测量机的工作原理及主要组成部分通过运转探测系统,测量工件表面坐标的测量系统称为坐标测量系统。
这是ISO标准对坐标测量系统的定义。
任何物体的形状都是由空间点组成的,而所有的几何测量都可以归结为空间点的测量,因此精确进行空间点坐标的采集,是评定任何几何形状及误差的基础。
坐标测量的基本原理是将被测零件放入允许的测量空间,精确地测出零件表面的点在空间3个坐标位置的数值,将这些点的坐标数值经过计算机数据处理,拟合形成测量元素,如圆、圆柱、圆锥等,再经过数学计算的方法得出其形状、位置公差及其他几何数据。
图1为测量机检测零件的工作原理图。
图1测量机检测零件的工作原理图测量机的组成部分主要有:主机、控制系统、测头测座系统、计算机系统。
各部分按照功能来分是相互独立的系统,一套控制系统可以连接不同的主机及测头测座系统。
测量机的基本硬件有多种形式:包括活动桥式、固定桥式、高架桥式、水平臂式、关节臂式。
在现在企业中,80%的测量机都是活动桥式,它结构简单,精度非常高,应用范围广。
(1)测量机控制系统原理及功能控制系统类似于一台电脑的主机,是测量机的控制中枢,主要功能有:控制、驱动测量机的运动、保持三轴同步、速度、加速度控制;对光栅读数进行处理;在有触发信号时采集数据;根据补偿文件,对测量机进行误差补偿;采集温度数据,进行温度补偿;对测量机的工作状态进行检测(形成控制、气压、速度、读数、测头等),采取保护措施;对扫描测头的数据进行处理,并控制扫描;与计算机进行各种信息交流;(2)测头测座系统测头测座系统是数据采集的触发系统,主要功能有:侧头传感器在探针接触点被测点时发出触发信号;控制器根据命令控制测座旋转到指定角度,并控制测头工作方式转换;测座连接测头,可以根据命令(或手动)转换角度方便测量。
坐标测量机是一种集成了光电子、精密机械、计算机科学、测试计量技术与仪器仪表于一体的效率高、功能多的精密测试仪器,可以完成对很多工艺形貌复杂零件(工件)的快速、高效、准确测量。
与传统长度类尺寸测量仪器相比,三坐标测量机测量在自动化检测、测量精度控制、大型复杂工件测量方面拥有巨大的优越性。
三坐标测量机在广泛应用的同时,测量不确定度的准确合理评定方法也受到了关注。
只有测量参数结果中包含了测量不确定度的测量结果,测量参数结果才是精准的、可靠的、有应用价值的。
1 测量原理和模型三坐标测量机测量量块尺寸是通过建立空间坐标系测量量块端面“点-面”或者“面-面”距离而得到的,而被测坐标测量机测量范围视具体仪器而定。
一般单轴不超过1m ,其分辨率分为1μm 和0.1μm 两种。
测量精度在2μm 左右,尺寸测量误差用量块校准。
部分坐标测量机(如划线机)测量范围往往很大,最大可超过10m ,分辨率为1μm ,测量精度在10μm 量级,需要利用激光干涉仪对其单轴的测量精度进行补充校准。
其中,光栅尺是坐标测量机的基准,基准保持恒定才能确保结果可靠。
由于光栅尺本身几乎没有热膨胀,而且光栅尺在测量机中是悬浮安装,从而保证测量温度和测量精度。
在空间三维坐标系F (a ,b ,c )中,定义面V 和面V 1,面采点集合S i (i =1,2,…,N )为面V 上一组随机点。
依据点到平面的计算公式,令S i (i =1,2,…,N )为CMM 测头在标准器端面采集点,即端面的拟合平面为:Z =ax +by +c (1)则由最小二乘法的平面V 到平面V 1上S 点的距离为:221b a z c by ax l kk k ++−++=(2)在操作中应用测量原理时要注意以下几个方面:应用三坐标测量机几何量长度测量原理时,蓝宝石测头在测量前要进行校准测量,且探测误差测量值要在最大允许误差内,同时对于面上点集合的采集尽量使采集面的面积与量块实际面积的端面相当。
坐标测量机长度测量示值误差不确定度分析
1 测量方法
依据坐标测量机校准技术规范JJF1064-2000, 坐标测量机的长度测量示值误差是采用量块进行校准, 一般要沿X 轴、Y 轴、Z 轴三个方向和空间四个对角线方向放置量块。
将量块的实际长度与坐标测量机所测的结果进行比较,从而得到坐标测量机的长度测量示值误差。
由于坐标测量机测量空间不同点的测量不确定度不同,不同的测量方案对测量结果的不确定度也有不同的影响,本文讨论坐标测量机自动测量沿空间对角线放置量块的不确定度,并以标称长度为100 mm 和1000 mm 的量块为例估算不确定度,最后得到与标称长度L 有关的扩展不确定度。
2 数学模型
δ=R -L (1)
式中:
δ──坐标测量机的长度测量示值误差; R ──坐标测量机测量量块的读数; L ──对应的量块实际长度。
3 方差和灵敏系数 依:
)(][)(222
k k m
1
k c x u x f/y u ∂∂=∑=
由式(1)有
)()()()()(222222L u L C R u R C u u c c ⋅+⋅=δ=
式中
C (R )=R ∂δ∂/=1
C(L)=L ∂δ∂/-1
则 )()(222
L u R u u c += (2)
由长度测量示值误差的数学模型,根据不确定度的传播公式得到长度测量示值误差的标准不确定度是由坐标测量机读数引起不确定度分量u (R )和量块引起不确定度分量u (L )两大部分组成。
4 不确定度的来源及估算
4.1 坐标测量机读数引起不确定度分量u (R )
坐标测量机读数引起不确定度主要是坐标测量机的测量重复性。
为了获得测量机沿空间测量的重复性,可将长度为20 mm 的量块沿空间对角线放置,编制测量机检测编程,让测量机自动重复测量该量块10次,得到一组测量误差 x 1,x 2,…,x 10如下表1,按式(3)得到实验标准偏差s, 则u (R )可由式(4)求得。
表1
测序 1 2 3 4 5 6 7 8 9 10 误差(μm ) +1.0 +1.3 +1.4 +1.3 +1.6 +1.6 +1.6 +1.4 +1.5 +1.3
19.0)101(91101101
2
=-=∑∑==i i i
i x x s μm (3)
u (R )= s (4)
4.2 量块引起不确定度分量u (L )
4.2.1 由检定量块不确定度引入的不确定度分量u (L 1)
首先要根据被校准的坐标测量机最大允许示值误差 MPE E 选择采用量块的等级, 一般来说检定量块不确定度应不超过(MPE E /4)。
假设采用三等量块校准坐标测量机,量块的检定证书给出其中心长度的扩展不确定度为(0.1+1.0L )μm (L 为量块的标称长度,单位 m,下同), 置信概率p =0.99,覆盖因子k 1=2.58,检定量块不确定度引入的不确定度分量u (L 1)按下式估算
u (L 1)=(0.1+1.0L )/ k 1 (5)
4.2.2 由量块长度变动量引入的不确定度分量u (L 2)
根据量块的检定规程JJG146-1994对量块长度变动量的定义,如果某一标称长度量块的长度变动量的允许值为∆,量块变动量误差可按半宽为∆/2 的均匀分布处理, k 2=3,则量块长度变动量引入的不确定度分量u (L 2)可按下式估算
u (L 2)= (∆/2)/ k 2 (6)
4.2.3 由检定量块长度稳定性引入的不确定度分量u (L 3)
根据量块的检定规程JJG146-1994,量块的长度稳定性为(0.05+1.0L )μm ,服从均匀分布k 3=3,量块长度稳定性引入的不确定度分量u (L 3) 可按下式估算
u (L 3)=(0.05+1.0L )/ k 3 (7)
4.2.4 环境温度偏离20℃引入的不确定度u (L 4)
坐标测量机工作环境的温度条件对其测量不确定度有较大的影响,为保证测量准确度环境温度的控制应满足测量机的出厂要求。
假设实际校准时环境温度的波动不超过0.5℃/h ,可只考虑温度偏离20℃对测量不确定度的影响,如温度控制在20℃±1℃,则温度偏离的变化范围为(-1℃~+1℃),被校准的坐标机采用钢带光栅, 其材料热膨胀系数与量块热膨胀系数的差值为∆α=2⨯10-6/℃ ,校准前量块与测量机已充分等温,不考虑量块与测量机存在温度差对测量不确定度的影响,将温度偏离按半宽 △t =1℃ 区间成均匀分布处理,温度偏离引入的不确定度u (L 4)可估算如下
u (L 4)=△α×L ×106 ×△t /3
= 2×10-6 ×L ×106×1/3=1.155L μm (8) 对于有些能自动检测工件温度而进行温度修正的坐标测量机,温度引入的不确定度则在于温度检测系统的测温不确定度,估算时应将式(8)中△t 换成测温不确定度。
合成以上四项, 将式(5)~式(8)代入式(9)可得到量块引起不确定度分量u (L )
2/142322212)]()()()([)(L u L u L u L u L u +++= (9)
5 合成标准不确定度和扩展不确定度
将式(4)和式(9)代入式(2)得到合成的标准不确定度 c u 如下,
2/122322212})155.1(]/)0.105.0[(]/)2/[(]/)0.11.0[({L k L k k L s u c +++∆+++= (10) 采用标称长度 L =100 mm 的量块校准坐标测量机时, 将量块长度变动量 ∆=0.2μm 和测量重复性s 代入式(10) 计算得到标准不确定度c u (100)=0.26μm ; 对于L =1000 mm ,同样可得到标准不确定度 c u (1000)=1.40μm 。
通过c u (100)和c u (1000) 确定标准不确定度值c u 与量块标称长度 L 的关系式如下:
c u =(0.13+13L /10000) μm (L 单位为mm )
取包含因子k =2, 则扩展不确定度: U =(0.26+26L /10000) μm (环境温度为 20℃±1℃) 从以讨论的是沿坐标测量机空间对角线放置量块的测量不确定度,按同样的步骤也可分析沿轴向放置量块的测量不确定度,校准坐标测量机长度测量示值误差的扩展不确定度与校准采用的量块、测量重复性及环境温度有密切的关系,具体计算时要根据选定的量块等级、实际的测量重复性和温度偏离影响量代入,估算的不确定度才能反映实际情况。
当测量机10次测量的重复性 s 分别0.2 μm ,0.5μm ,1.0μm 时,不同尺寸的量块,在不同的温度偏离情况下,计算的扩展不确定度见下表2,表3,表4。
表2 重复性 s=0.2 μm ,扩展不确定度U 包含因子k=2 单位 μm
表3 重复性s=0.5 μm,扩展不确定度U 包含因子k=2 单位μm
表4 重复性s=1.0 μm,扩展不确定度U 包含因子k=2 单位μm。