一种基于视觉的车道线检测与跟踪算法_图文(精)
- 格式:doc
- 大小:492.50 KB
- 文档页数:20
一种基于视觉的车道线检测与跟踪算法基于视觉的车道线检测与跟踪算法是自动驾驶等领域中的一个重要研究方向。
车道线检测与跟踪算法的主要目标是从车辆摄像头或传感器获取的图像中提取出车道线的位置信息,并能够实时跟踪车道线的变化以保持车辆的行驶安全。
以下是一个基于视觉的车道线检测与跟踪算法的详细介绍。
首先,车道线检测与跟踪算法通常使用图像处理技术和计算机视觉算法来处理从摄像头或传感器获取的图像。
首先,图像会被转换为灰度图像,并进行预处理操作,例如直方图均衡化、高斯模糊等,以提高车道线的边缘检测效果。
接下来,边缘检测算法会被应用于图像上,以便找到可能是车道线的边缘区域。
常用的边缘检测算法包括Sobel算子、Canny算子等。
这些算法通过检测图像中的灰度梯度变化来找到边缘。
找到边缘后,可以采用霍夫变换或其他方法来将边缘连接成直线段。
然后,通过拟合直线模型到检测到的边缘上,可以得到车道线的参数,例如斜率和截距。
这些参数可以用来计算车道线的位置和方向。
在这一步骤中,常用的拟合算法包括最小二乘法、鲁棒拟合等。
接下来,为了实现车道线的跟踪,必须在连续帧之间建立关联。
可以使用滤波算法(如卡尔曼滤波)或递归算法(如扩展卡尔曼滤波)来对车道线进行预测和融合,以提高跟踪的精确性和稳定性。
最后,为了确保车辆能够跟随车道线正确行驶,可以使用控制算法来对车辆的转向和加速进行调整。
这些算法可以基于车道线的位置和方向来计算车辆的操控命令,以使车辆保持在正确的道路中心线上。
除了基本的车道线检测和跟踪算法,还可以采用一些改进和优化的方法来提高算法的性能。
例如,可以使用机器学习算法来改善车道线的检测和跟踪精度,可以使用深度学习算法来进行车道线的语义分割和识别,以及可以使用复杂的模型来处理复杂的驾驶场景,例如交叉口、环岛等。
总之,基于视觉的车道线检测与跟踪算法是自动驾驶等领域中的一个重要研究方向。
通过使用图像处理技术和计算机视觉算法,可以从车辆的摄像头或传感器获取的图像中提取出车道线的位置信息,并进行实时跟踪,以保持车辆行驶的安全和稳定。
基于计算机视觉的车道线识别算法研究第一章:引言计算机视觉是一种研究计算机如何获取、处理、分析图像和视频的技术。
作为人工智能的一个分支,计算机视觉在智能交通领域有着广泛的应用。
其中,车道线识别是智能驾驶、自动驾驶等技术的重要组成部分。
车道线识别算法是通过分析车辆行驶时图像中的车道线,确定车辆所在的行驶路线,并指导自动驾驶系统行驶。
本文将基于计算机视觉研究车道线识别算法,提出一种基于图像处理技术的车道线识别算法。
第二章:相关技术2.1 图像处理技术图像处理技术是车道线识别算法的基础,主要包括图像滤波、边缘检测、二值化、霍夫变换等技术。
其中,图像滤波是为了去除图像噪声,边缘检测是为了提取车道线的边缘信息,二值化是为了将图像转化为黑白二值图像,霍夫变换是为了检测图像中的直线。
2.2 机器学习技术机器学习技术用于实现智能化的车道线识别算法。
常用的机器学习算法包括支持向量机、决策树、神经网络等。
机器学习算法可以通过训练样本来学习车道线的特征,并根据学习结果进行车道线识别。
第三章:算法设计本文提出的车道线识别算法基于图像处理技术和机器学习技术,主要分为以下几个步骤:3.1 图像预处理图像预处理包括图像滤波、边缘检测、二值化等步骤。
首先,采用高斯滤波去除图像噪声;然后,采用Sobel算子进行边缘检测,并使用Canny算法进一步提取车道线的边缘信息;最后,将图像二值化,将车道线的边缘信息提取出来。
3.2 车道线检测车道线检测包括霍夫变换和直线拟合两个步骤。
首先,使用霍夫变换检测图像中的直线;然后,对直线进行参数拟合,得到车道线的位置和斜率。
3.3 车道线跟踪车道线跟踪是为了保持车道线的连通性和稳定性。
本文采用滑动窗口的方式对车道线进行跟踪。
首先,将车道线分为多个窗口,然后通过每个窗口内像素点的多项式拟合来得到车道线的位置信息。
3.4 车道线校正车道线校正是为了纠正车道线的偏差。
本文采用车道线左右偏差的平均值作为校正系数,将车道线向左或右移动校正偏差。
基于视觉的车道线检测算法研究与应用随着汽车保有量的增加,道路交通安全问题日益凸显。
车道线作为道路交通规则的重要组成部分,对于驾驶员行车安全有着至关重要的作用。
因此,车道线的准确检测对于智能驾驶系统和驾驶员辅助系统的发展具有重要意义。
基于视觉的车道线检测算法是一种常见且有效的方法,它利用车辆装备的摄像头对道路图像进行处理和分析,以实现车道线的检测和跟踪。
该算法主要分为图像预处理、特征提取和车道线识别三个步骤。
首先,图像预处理是车道线检测算法中的重要步骤之一。
通过对图像进行灰度化处理、高斯滤波和边缘检测,可以减少图像中的噪声和干扰,提高车道线的辨识度和准确性。
其次,特征提取是车道线检测算法的核心环节。
常用的特征提取方法包括Hough变换、卷积神经网络等。
这些方法可以根据车道线的特征进行模式匹配和曲线拟合,从而实现车道线的提取和识别。
最后,车道线识别是基于视觉的车道线检测算法的最终目标。
通过将特征提取得到的车道线信息与实际道路环境进行匹配,可以准确地识别出车道线的位置和形状,为驾驶员提供准确的行车指导和决策支持。
基于视觉的车道线检测算法已经在自动驾驶、驾驶员辅助系统等领域得到广泛应用。
它可以实时地检测和跟踪车道线,帮助驾驶员保持车辆在正确的车道内行驶,避免事故和违规行为。
此外,该算法还可以通过与交通信号灯、车辆和行人等其他交通参与者信息的融合,实现更高级别的驾驶决策和行为规划。
然而,基于视觉的车道线检测算法在实际应用中仍然存在一些挑战和问题。
例如,对于复杂路况下的车道线检测,如曲线道路、弯道和交叉口等,算法的准确性和鲁棒性仍有待提高。
此外,光线变化、天气条件和摄像头质量等因素也会对算法的性能产生影响。
综上所述,基于视觉的车道线检测算法是一种重要的研究方向和应用领域。
通过不断改进算法的准确性和鲁棒性,可以为智能驾驶系统和驾驶员辅助系统的发展提供支持,提高道路交通的安全性和效率。
基于深度学习的车道线检测与识别算法设计随着智能汽车技术的发展和普及,车辆识别和车道线检测成为了自动驾驶系统中至关重要的组成部分。
传统的车道线检测算法通常基于图像处理技术,但由于其对于光照条件和道路标识变化的敏感性较高,容易受到噪声和遮挡的干扰。
相比之下,基于深度学习的车道线检测与识别算法能够更好地适应各种复杂条件,并具有更高的精度和稳定性。
本文将介绍一种基于深度学习的车道线检测与识别算法设计。
该算法主要包括数据准备、网络模型设计和模型训练三个步骤。
第一步是数据准备。
为了训练车道线检测与识别模型,我们需要收集标注有车道线的图像数据。
这些图像数据应涵盖不同光照条件、不同天气条件和不同道路类型。
数据的多样性可以有效提高模型的鲁棒性。
收集到的图像数据需要进行预处理,包括图像大小的统一化、颜色空间的转换和数据增强等,以提高数据的质量和多样性。
第二步是网络模型设计。
在深度学习中,卷积神经网络(Convolutional Neural Network,CNN)经常被用于图像相关的任务。
在车道线检测与识别任务中,我们可以设计一种特定的CNN网络结构。
典型的CNN网络结构包括卷积层、池化层和全连接层。
卷积层用于提取图像的特征,池化层用于减小特征图的大小并保留主要信息,全连接层用于将特征图与具体的车道线信息相对应。
此外,为了进一步提高模型的性能,我们可以采用一些改进的网络结构,如多尺度特征提取和注意力机制等。
第三步是模型训练。
在数据准备和网络模型设计完成后,我们可以使用收集到的数据训练深度学习模型。
训练过程中,我们需要将数据集划分为训练集和验证集,用于模型的训练和评估。
通过优化算法(如梯度下降法)和损失函数(如交叉熵损失函数),不断调整网络参数,使得模型能够在训练集上学习到车道线的特征,并在验证集上评估模型的性能。
为了防止过拟合,我们可以使用一些正则化技术,如L1、L2正则化和dropout等。
在模型训练完成后,我们可以使用该模型进行车道线的检测和识别。
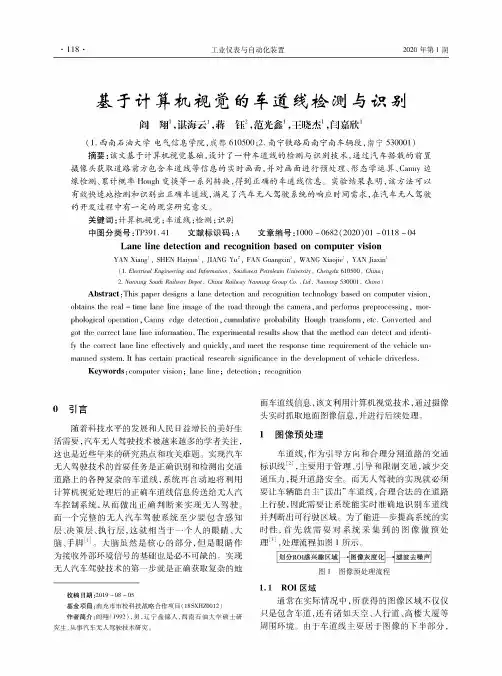
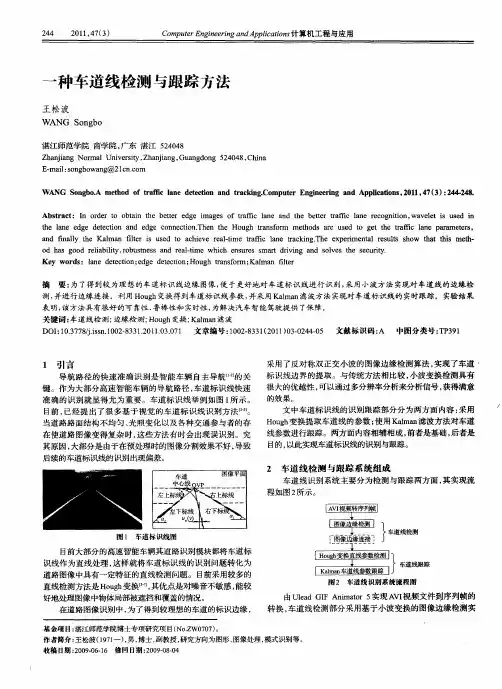
基于计算机视觉的车道线检测与识别阎翔1,谌海云1,蒋钰2,范光鑫X王晓杰X闫嘉欣1(1.西南石油大学电气信息学院,成都610500;2.南宁铁路局南宁南车辆段,南宁530001)摘要:该文基于计算机视觉基础,设计了一种车道线的检测与识别技术,通过汽车搭载的前置摄像头获取道路前方包含车道线等信息的实时画面,并对画面进行预处理、形态学运算、Canny边缘检测、累计概率Hough变换等一系列转换,得到正确的车道线信息。
实验结果表明,该方法可以有效快速地检测和识别出正确车道线,满足了汽车无人驾驶系统的响应时间需求,在汽车无人驾驶的开发过程中有一定的现实研究意义。
关键词:计算机视觉;车道线;检测;识别中图分类号:TP391.41文献标识码:A文章编号#1000-0682(2020)01-0118-04 Lane line detection and recognition based on computer visionYAN Xiang1,SHEN Haiyun1,JIANG Yu2,FAN Guangxin1,WANG Xiaojie1,YAN Jiaxin1(1.Electrical Engineering and Irnformation,Southwest Petroleum,University,Chengdu610500,China+2.Nanning South Railway DepO,China Railway Nanning Group Co.,Lth,Nanning530001,China#Abstract:This paper designs a lane detection and recojnition technology based on computer vision, obtains the reaO-time lane line image of the road through the comera, and performs preprocessing,moe phologicoM operation,Canny edge detection,cumulativv probability Hough transfoan,eto.ConvvOed and got the cocect lane line information.The experimental esuOs show that the method con detect and iyentt-fy the coceco lane One ePectively and quickly,and meet the esponsc tirne requirement of the vehicle unmanned system.It has certain practicol resesrch significonco O tee development of vehide driverless.Keywonit:compute vision;lane line;detection;recoonition0引言随着科技水平的发展和人民日益增长的美好生活需要,汽车无人驾驶技术被越来越多的学者关注,这也是近些年来的研究热点和攻关难题。
基于视觉的车道标志线检测和跟踪方法研
究
ﻭﻭ全部:ﻭ
第1单位:ﻭﻭ航空航天大学
摘要:
本文针对车载摄像机拍摄的图像,为了得到较理想的车道的标识边缘,提出了1种车道标志线检测和跟踪方法,即首先使用反对称双正交小波实现图像边缘检测,完成车道线边界的识别。
在边缘图像中,利用Hough变换对噪声不敏感,能较好的响应直线的特点提取车道线参数,采用具有预测功能Kalman算法完成对序列图像车道线参数的持续跟踪.实验结果表明,该方法具有较强的抗干扰性和较好的鲁棒性。
ﻭ
计算机视觉,图像处理,车道标志线,边缘检测,小波分
20析,Hough变换,Kalman跟踪(浏览全文)ﻭﻭ发表日期:ﻭﻭ08年02月15日
ﻭ同行评议:ﻭ
1)题目点名小波及Kalman可能更贴切些,目前题目偏大;2)英文摘要不准确的说法较多,建议重写;3)国际上车道
检测及跟踪有许多有价值的,请适当增加!4)对小波、Kalma n滤波等预备知识的介绍应更简洁些,重点介绍自己的工作及成果;5)给出的结果的理论值是如何得到的,需要说明!采用的算法和现有其他算法相比优点在什么地方,如有可能,请结合结果作对比!
综合评价:ﻭﻭ注:同行评议是由特聘的同行专家给出的评审意见,综合评价是综合专家对各要素的评议得出的数值,以1至5颗星显示。
ﻭﻭ。
基于计算机视觉技术的的车道线检测算法研究随着自动驾驶技术的不断发展,基于计算机视觉技术的车道线检测算法也变得非常重要。
在自动驾驶技术中,汽车需要识别路面上的车道线以便进行自动驾驶。
目前,汽车中最常用的车道线检测算法是基于计算机视觉技术的算法。
该算法通过对图像中的车道线进行识别和处理,以实现自动驾驶功能。
一、计算机视觉技术的基础计算机视觉技术是一种将图像和视频信号转换为数字信号的技术。
这种技术可以帮助机器感知和理解环境,并在物体识别、目标跟踪和模式识别等方面取得突破。
在计算机视觉技术中,图像处理是非常重要的一环。
图像处理包括对图像进行预处理、滤波、增强和特征提取等步骤。
图像处理可以提高图像分辨率和准确度,促进图像识别和分析的精度。
二、车道线检测算法的原理车道线检测算法是基于计算机视觉技术的一种算法。
该算法的主要步骤是:采集图像、预处理、特征提取和分类等。
下面是算法的详细步骤:1.采集图像算法的第一步是采集图像。
采集的图像应包含车辆前方的道路和车道线。
摄像头应放置在汽车前方,以获得最佳视野。
2.预处理采集的图像需要进行预处理。
预处理包括图像去噪、滤波、图像增强和二值化等过程。
预处理可以提高车道线图像的清晰度和准确性,以便后续处理。
3.特征提取特征提取是车道线检测算法的重要步骤。
特征提取是通过图像处理算法将车道线从背景中分离出来,以便后续分类。
常用的特征提取算法包括霍夫变换、边缘检测和形态学处理等。
这些算法可以在图像中检测到直线、曲线和形状等几何特征。
4.分类特征提取后,需要对特征进行分类。
分类是指将图像中分离出来的车道线与其它物体进行区分。
在分类过程中,反向传播神经网络、支持向量机和贝叶斯网络等机器学习算法被广泛应用。
这些算法可以自动学习车道线和其它物体的特征,从而实现准确的分类。
5.输出结果经过特征提取和分类后,车道线检测算法会输出车道线的信息。
输出信息包括车道线的位置、长度和方向等参数。
三、车道线检测算法的应用车道线检测算法被广泛应用于汽车自动驾驶、车辆控制和行车安全等领域。
基于机器视觉的车道标线识别算法研究一、引言随着人工智能技术的迅猛发展,机器视觉已经成为了目前最为前沿和重要的技术之一。
在交通运输领域,机器视觉技术通过对图像、视频等数据的分析和处理,能够实现车辆自动驾驶、车辆安全等诸多功能。
其中,车道标线识别是车辆自动驾驶、车道保持、违规行为识别等领域中必不可少的技术之一。
本文就基于机器视觉的车道标线识别算法进行研究,旨在探索一种高效、准确、实用的车道标线识别算法,为智能交通系统的发展做出一定的贡献。
二、车道标线识别的重要性车道标线是指路面上用不同颜色及线形等标注的分界线,它能够有效的将道路分成不同的行车区域,使车辆按照规定的方向、车速和行驶位置行驶,防止车辆交叉行驶和碰撞,保证道路交通秩序和行车安全。
因此,车道标线对于交通安全和汽车驾驶员的防护至关重要。
然而,在现实生活中,车道标线经常因为多种原因而被磨损、删去或部分遮挡,导致车辆驾驶过程中难以看清车道标线,从而增加车辆驾驶员的行车难度,甚至会导致交通事故的发生。
如果能够通过机器视觉技术对车道标线进行快速、准确的识别,就可以为车辆自动驾驶、车道保持、违规行为识别等领域提供重要支持。
三、车道标线识别算法的研究现状车道标线识别算法是一种应用广泛的机器视觉技术,随着计算机技术和图像处理技术的不断发展,车道标线识别算法在最近几年得到了长足的发展。
目前,常见的车道标线识别算法主要包括以下几种:1. 基于自适应阈值的二值化方法该方法通常采用固定阈值或者自适应阈值的方式进行二值化处理,得到车道标线的二值图像,然后通过形态学处理和滤波处理,最后得到车道标线的精确位置。
该方法主要优点是计算简单,运行速度快,但是不能适应夜晚等弱光照条件下的车道标线识别。
2. 基于颜色空间分割的方法该方法通过定义车道标线区域的颜色空间模型,利用颜色差异将车道标线区域和其他区域进行分割,得到车道标线的位置信息。
该方法主要优点是能够适应夜晚等弱光照条件下的车道标线识别,但受到环境复杂性和光照条件的影响较大。
基于计算机视觉的自动驾驶车道线检测技术研究自动驾驶技术是未来交通行业的重要发展方向之一,其中车道线检测是实现自动驾驶的关键技术之一。
基于计算机视觉的自动驾驶车道线检测技术在近年来得到了广泛的研究和应用。
首先,计算机视觉是指通过摄像机和计算机等设备对图像和视频进行分析和处理的技术。
基于计算机视觉的自动驾驶车道线检测技术利用摄像头捕捉到的实时图像数据,通过算法和模型来分析图像并准确地检测出道路上的车道线。
车道线检测技术的研究涉及到图像处理、模式识别和机器学习等领域。
首先,在图像处理方面,对捕捉到的图像进行预处理,包括去噪、图像增强和边缘检测等操作。
其中,边缘检测是关键的一步,它能够帮助将车道线与背景分离出来,便于后续的检测和跟踪。
其次,在模式识别方面,可以利用图像处理后的结果进行车道线的识别和分类。
常见的方法包括基于特征提取的算法和基于机器学习的算法。
对于特征提取的算法,可以提取图像中的线段、曲线和角度等特征,然后通过分类器进行识别。
而基于机器学习的算法则可以通过训练数据来学习出车道线的模式,并进行预测和识别。
此外,车道线的跟踪也是自动驾驶技术中重要的一环。
在车道线检测的基础上,需要对车道线进行跟踪,并不断更新位置和方向的变化。
跟踪算法常用的包括卡尔曼滤波、粒子滤波和神经网络等方法。
这些方法能够准确地跟踪车道线的位置和形状,并根据跟踪结果进行车辆的控制和决策。
当然,基于计算机视觉的自动驾驶车道线检测技术还面临一些挑战和问题。
首先是在复杂环境下的处理,如雨天、夜晚和反光等情况下的车道线检测。
这些情况下,图像质量可能会下降,车道线也难以被准确识别和跟踪。
其次是对不同类型车道线的处理,如虚实线、斑马线和双实线等。
不同类型的车道线具有不同的特点和规则,需要针对性地设计和优化算法。
总的来说,基于计算机视觉的自动驾驶车道线检测技术是实现自动驾驶的重要一环。
通过图像处理、模式识别和机器学习等技术手段,能够准确地检测和跟踪道路上的车道线,为自动驾驶提供重要的辅助信息。