自动控制原理基础伯德图
- 格式:docx
- 大小:154.31 KB
- 文档页数:7
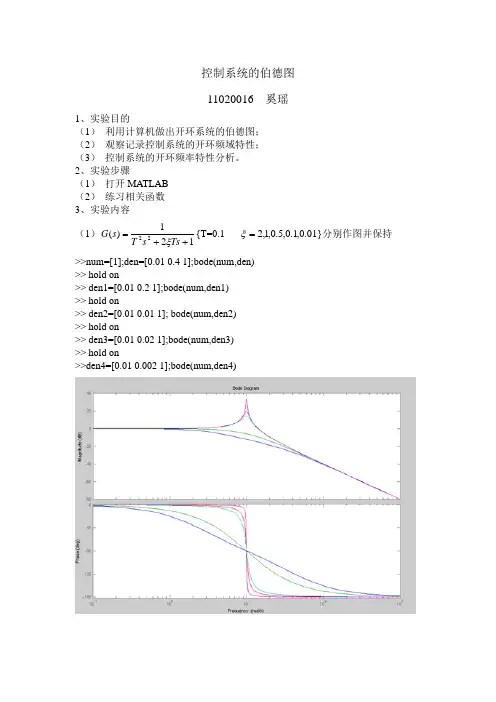
控制系统的伯德图11020016 奚瑶1、实验目的(1) 利用计算机做出开环系统的伯德图;(2) 观察记录控制系统的开环频域特性;(3) 控制系统的开环频率特性分析。
2、实验步骤(1) 打开MATLAB(2) 练习相关函数3、实验内容(1)121)(22++=Ts s T s G ξ{T=0.1 01.0,1.0,5.0,1,2=ξ}分别作图并保持 >>num=[1];den=[0.01 0.4 1];bode(num,den)>> hold on>> den1=[0.01 0.2 1];bode(num,den1)>> hold on>> den2=[0.01 0.01 1]; bode(num,den2)>> hold on>> den3=[0.01 0.02 1];bode(num,den3)>> hold on >>den4=[0.01 0.002 1];bode(num,den4)(2))11.0)(101.0(6.31)(++=s s s s G 要求:1)做伯德图,在曲线上标出:幅频特性——初始段斜率、高频段斜率、开环截止频率、中频段穿越斜率 相频特性——低频段渐进相位角、高频段渐进相位角、-180°的穿越频率num=[31.6];den=[0.001 0.11 1 0];bode(num,den)grid初始段斜率=dec dB 202.211.001.1508.29-≈-=-- 高频段斜率= dec dB 3.57-≈dec dB 60-开环截止频率=16.3中频段穿越斜率= dec dB 4.40-≈dec dB 40-低频段相位角=-91.1°高频段相位角=-269°-180°线的穿越频率=322)由稳定裕度命令计算系统的稳定裕度c γ和g L ,并确定系统的稳定性 num=[31.6];den=[0.001 0.11 1 0] ;sys=tf(num,den);margin(num,den);[Gm(0),Pm(0),wg(0),wp(0)]=margin(sys);g L =11 c γ=180-158=22°稳定裕度g L > 6dB 相位裕度 c γ> 0°,但<30°所以系统稳定,但是相位裕度低于30°,接近于临界稳定点,系统趋于等幅震荡,稳定性相对较差。
自动控制原理总结第一章绪论技术术语1. 被控对象:是指要求实现自动控制的机器、设备或生产过程。
2. 被控量:表征被控对象工作状态的物理参量(或状态参量),如转速、压力、温度、电压、位移等。
3. 控制器:又称调节器、控制装置,由控制元件组成,它接受指令信号,输出控制作用信号于被控对象。
4. 给定值或指令信号r(t):要求控制系统按一定规律变化的信号,是系统的输入信号。
5. 干扰信号n(t):又称扰动值,是一种对系统的被控量起破坏作用的信号。
6. 反馈信号b(t):是指被控量经测量元件检测后回馈送到系统输入端的信号。
7. 偏差信号e(t):是指给定值与被控量的差值,或指令信号与反馈信号的差值。
闭环控制的主要优点:控制精度高,抗干扰能力强。
缺点:使用的元件多,线路复杂,系统的分析和设计都比较麻烦。
对控制系统的性能要求:稳定性快速性准确性稳定性和快速性反映了系统的过渡过程的性能。
准确性是衡量系统稳态精度的指标,反映了动态过程后期的性能。
第二章控制系统的数学模型拉氏变换的定义:几种典型函数的拉氏变换1.单位阶跃函数1(t)2.单位斜坡函数3.等加速函数4.指数函数e-at5.正弦函数sin ωt6.余弦函数cos ωt7.单位脉冲函数(δ函数)拉氏变换的基本法则1.线性法则2.微分法则3.积分法则4.终值定理5.位移定理传递函数:线性定常系统在零初始条件下,输出信号的拉氏变换与输入信号的拉氏变换之比称为系统(或元部件)的传递函数。
动态结构图及其等效变换1.串联变换法则2.并联变换法则3.反馈变换法则4.比较点前移“加倒数”;比较点后移“加本身”。
5.引出点前移“加本身”;引出点后移“加倒数”梅森(S. J. Mason)公式求传递函数典型环节的传递函数1.比例(放大)环节2.积分环节3.惯性环节4.一阶微分环节5.振荡环节6.二阶微分环节第三章时域分析法二阶系统分析二阶系统的单位阶跃响应1.过阻尼ξ>1的情况:系统闭环特征方程有两个不相等的负实根。
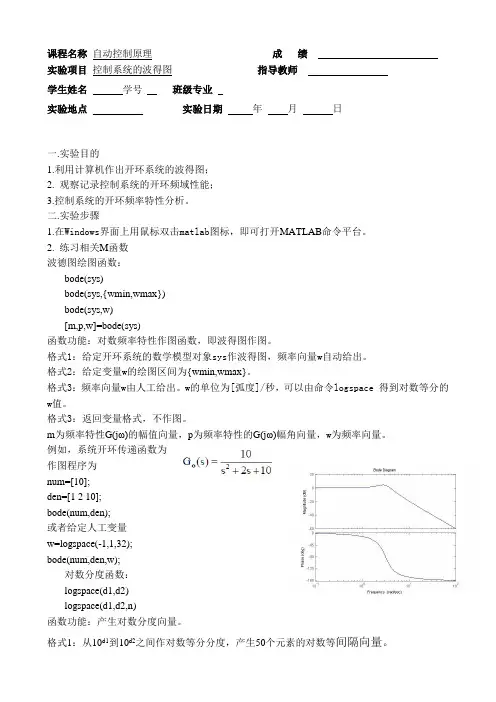
课程名称自动控制原理成绩实验项目控制系统的波得图指导教师学生姓名学号班级专业实验地点实验日期年月日一.实验目的1.利用计算机作出开环系统的波得图;2. 观察记录控制系统的开环频域性能;3.控制系统的开环频率特性分析。
二.实验步骤1.在Windows界面上用鼠标双击matlab图标,即可打开MATLAB命令平台。
2. 练习相关M函数波德图绘图函数:bode(sys)bode(sys,{wmin,wmax})bode(sys,w)[m,p,w]=bode(sys)函数功能:对数频率特性作图函数,即波得图作图。
格式1:给定开环系统的数学模型对象sys作波得图,频率向量w自动给出。
格式2:给定变量w的绘图区间为{wmin,wmax}。
格式3:频率向量w由人工给出。
w的单位为[弧度]/秒,可以由命令logspace 得到对数等分的w值。
格式3:返回变量格式,不作图。
m为频率特性G(jω)的幅值向量,p为频率特性的G(jω)幅角向量,w为频率向量。
例如,系统开环传递函数为作图程序为num=[10];den=[1 2 10];bode(num,den);或者给定人工变量w=logspace(-1,1,32);bode(num,den,w);对数分度函数:logspace(d1,d2)logspace(d1,d2,n)函数功能:产生对数分度向量。
格式1:从10d1到10d2之间作对数等分分度,产生50个元素的对数等间隔向量。
格式2:从10d1到10d2之间作对数等分分度,给定等分数n 。
半对数绘图函数:semilogx(…)函数功能:半对数绘图命令。
使用格式:横坐标为对数等分分度,其它与plot()命令的使用格式相同。
对于上述系统作对数幅频特性。
程序为w=logspace(-1,1,32); % w 范围和点数nmag=10./((i*w).^2+2.*(i*w)+10); % 计算模值L=20*log(abs(mag)); % 模取对数semilogx(w,L); % 半对数作图grid % 画网格线稳定裕度函数:margin(sys)[Gm,Pm,wg,wp]= margin(sys)[Gm,Pm,wg,wp]= margin(m,p,w)函数功能:计算系统的稳定裕度,相位裕度Gm 和幅值裕度Pm 。


控制系统的伯德图11020016 奚瑶1、实验目的(1) 利用计算机做出开环系统的伯德图;(2) 观察记录控制系统的开环频域特性;(3) 控制系统的开环频率特性分析。
2、实验步骤(1) 打开MATLAB(2) 练习相关函数3、实验内容(1)121)(22++=Ts s T s G ξ{T=0.1 01.0,1.0,5.0,1,2=ξ}分别作图并保持 >>num=[1];den=[0.01 0.4 1];bode(num,den)>> hold on>> den1=[0.01 0.2 1];bode(num,den1)>> hold on>> den2=[0.01 0.01 1]; bode(num,den2)>> hold on>> den3=[0.01 0.02 1];bode(num,den3)>> hold on >>den4=[0.01 0.002 1];bode(num,den4)(2))11.0)(101.0(6.31)(++=s s s s G 要求:1)做伯德图,在曲线上标出:幅频特性——初始段斜率、高频段斜率、开环截止频率、中频段穿越斜率 相频特性——低频段渐进相位角、高频段渐进相位角、-180°的穿越频率num=[31.6];den=[0.001 0.11 1 0];bode(num,den)grid初始段斜率=dec dB 202.211.001.1508.29-≈-=-- 高频段斜率= dec dB 3.57-≈dec dB 60-开环截止频率=16.3中频段穿越斜率= dec dB 4.40-≈dec dB 40-低频段相位角=-91.1°高频段相位角=-269°-180°线的穿越频率=322)由稳定裕度命令计算系统的稳定裕度c γ和g L ,并确定系统的稳定性 num=[31.6];den=[0.001 0.11 1 0] ;sys=tf(num,den);margin(num,den);[Gm(0),Pm(0),wg(0),wp(0)]=margin(sys);g L =11 c γ=180-158=22°稳定裕度g L > 6dB 相位裕度 c γ> 0°,但<30°所以系统稳定,但是相位裕度低于30°,接近于临界稳定点,系统趋于等幅震荡,稳定性相对较差。
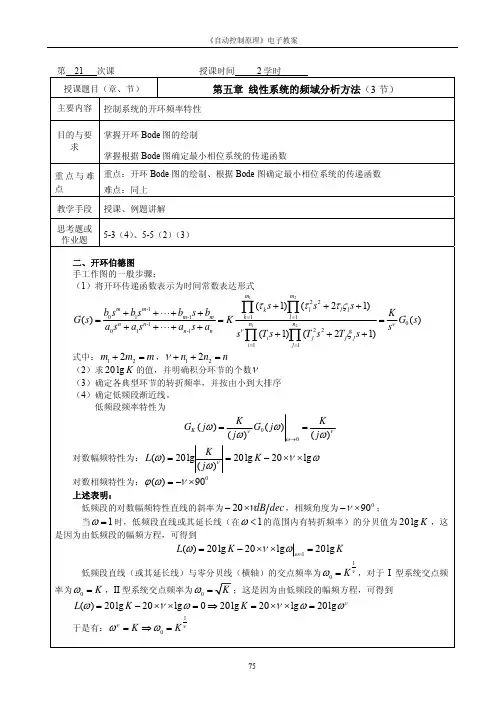
第五章 频域分析法目的:①直观,对高频干扰的抑制能力。
对快(高频)、慢(低频)信号的跟踪能力。
②便于系统的分析与设计。
③易于用实验法定传函。
§5.1 频率特性一. 定义)()()()(1n p s p s s s G +⋅⋅⋅+=θ在系统输入端加一个正弦信号:t R t r m ωsin )(⋅=))(()(22ωωωωωj s j s R s R s R m m -+⋅=+⋅=↔ 系统输出:))(()()()()(1ωωωθj s j s R p s p s s s Y m n-+⋅⋅+⋅⋅⋅+=t j t j e A e A t y t y ωω⋅+⋅+=↔-瞬态响应)()(1若系统稳定,即)(s G 的极点全位于s 左半平面,则 0)(l i m 1=∞→t y t稳态响应为:tj tj ss eA eA t y ωω⋅+⋅=-)(而)(21)()(22ωωωωωj G R jj s s R s G A m j s m -⋅-=+⋅+⋅⋅=-=)(21)()(22ωωωωωj G R jj s s R s G A m j s m ⋅=-⋅+⋅⋅== ∴t j m tj m ss e j G R je j G R j t y ωωωω⋅⋅+⋅-⋅-=-)(21)(21)( =])()([21t j t j m e j G e j G R jωωωω-⋅--⋅⋅ 又)(s G 为s 的有理函数,故)()(*ωωj G j G -=,即φωωj e j G j G )()(= φωωj e j G j G -=-)()(∴][)(21)()()(φωφωω+-+--⋅=t j t j mss e e j G R jt y =)sin()(φωω+⋅⋅t j G R m =)sin(φω+⋅t Y m可见:对稳定的线性定常系统,加入一个正弦信号,其稳态响应也是一个同频率的正弦信号。
其幅值是输入正弦信号幅值的)(ωj G 倍,其相移为)(ωφj G ∠=。
使用MATLAB 绘制频率特性曲线
姓名 黄勇 班级 16电气本三 学号 4702160186
一、频率特性
在定义谐波输入下,输出响应中与输入同频率的谐波分量与谐波输入的幅值之比A(ω)为幅频特性,相位之差)(ωϕ为相频特性,并称其指数表达形式:
()()()j G j A e ϕω
ωω=
为系统的频率特性。
总结上述我们可知:频率特性由两个部分组合而成,分别是幅频特性和相频特性。
稳态系统的输出信号与输入信号的相位之差我们称其为相频特性。
稳态系统输出与输入的幅值之比称为幅频特性。
另外频率响应对稳定系统和不稳定系统都适应,其中稳定系统的频率特性可以通过实验的方法确定。
二、频率特性的几何表示法
⏹ 幅相频率特性曲线
简称幅相特性曲线,或幅相特性,或极坐标图。
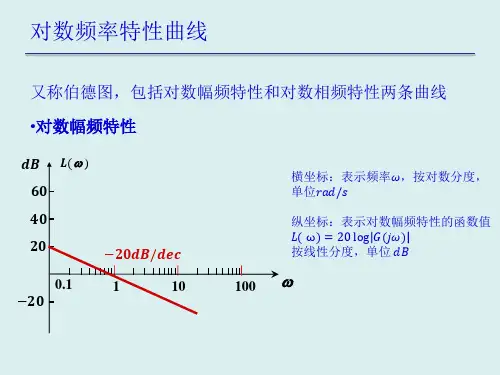
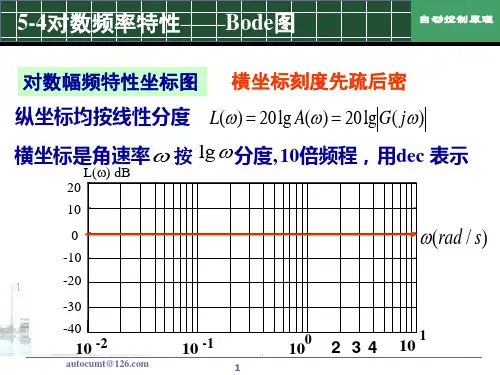
⏹ 对数频率特性曲线
又称为伯德曲线或伯德图。
⏹ 对数幅相曲线
又称为尼科尔斯曲线或尼科尔斯图。
三、惯性环节频率特性的绘制
惯性环节的表达式为: ()
1
1G s Ts =
+
T 的取值分别为2、4、7,使用MATLAB 软件绘制
MATLABA的函数指令如下:
指令说明:num为分子指令;den为分母指令;此次画图调用了伯德图画法(bode指令)。
绘制图如下:
T=2时。
MATLABA的函数指令如下:
绘制图如下:
同理当T=4时。
MATLABA的函数指令如下:
绘制图如下:
四、振荡环节频率特性的绘制
振荡环节的传递函数为: ()22
1=21
n
n
G
s s
s
ζωω+
+
在
2
01取值,本次取值分别为0.1 0.3 0.5 0.707 0.85 0.91 1。
方法一:使用伯德图画MATLAB函数程序指令如下:
MATLAB图形显示如下:
方法二:使用奈奎斯特图画
取值分别为0.1 0.3 0.5 0.707 0.85 0.91 1。
MATLAB函数程序指令如下:
MATLAB图形显示如下:。