自动控制原理之伯德图
- 格式:pptx
- 大小:374.87 KB
- 文档页数:45
自动控制原理总结第一章 绪 论技术术语1. 被控对象:是指要求实现自动控制的机器、设备或生产过程。
2. 被控量:表征被控对象工作状态的物理参量(或状态参量),如转速、压力、温度、电压、位移等。
3. 控制器:又称调节器、控制装置,由控制元件组成,它接受指令信号,输出控制作用信号于被控对象。
4. 给定值或指令信号r(t):要求控制系统按一定规律变化的信号,是系统的输入信号。
5. 干扰信号n(t):又称扰动值,是一种对系统的被控量起破坏作用的信号。
6. 反馈信号b(t):是指被控量经测量元件检测后回馈送到系统输入端的信号。
7. 偏差信号e(t):是指给定值和被控量的差值,或指令信号和反馈信号的差值。
闭环控制的主要优点:控制精度高,抗干扰能力强。
缺点:使用的元件多,线路复杂,系统的分析和设计都比较麻烦。
对控制系统的性能要求 :稳定性 快速性 准确性稳定性和快速性反映了系统的过渡过程的性能。
准确性是衡量系统稳态精度的指标,反映了动态过程后期的性能。
第二章 控制系统的数学模型拉氏变换的定义:-0()()e d st F s f t t +∞=⎰几种典型函数的拉氏变换1.单位阶跃函数1(t)2.单位斜坡函数3.等加速函数4.指数函数e -at5.正弦函数sin ωt6.余弦函数cos ωt7.单位脉冲函数(δ函数) 拉氏变换的基本法则 1.线性法则 2.微分法则 3.积分法则1()d ()f t t F s s ⎡⎤=⎣⎦⎰L4.终值定理()lim ()lim ()t s e e t sE s →∞→∞==5.位移定理00()e()sf t F s ττ--=⎡⎤⎣⎦Le ()()atf t F s a ⎡⎤=-⎣⎦L传递函数:线性定常系统在零初始条件下,输出信号的拉氏变换和输入信号的拉氏变换之比称为系统(或元部件)的传递函数。
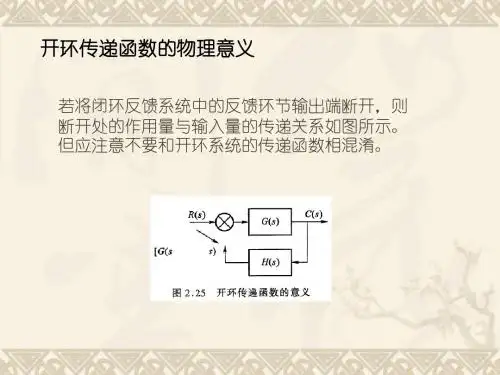
动态结构图及其等效变换 1.串联变换法则 2.并联变换法则 3.反馈变换法则4.比较点前移“加倒数”;比较点后移“加本身”。
使用MATLAB 绘制频率特性曲线姓名 黄勇 班级 16电气本三 学号 4702160186一、频率特性在定义谐波输入下,输出响应中与输入同频率的谐波分量与谐波输入的幅值之比A(ω)为幅频特性,相位之差)(ωϕ为相频特性,并称其指数表达形式:()()()j G j A e ϕωωω=为系统的频率特性。
总结上述我们可知:频率特性由两个部分组合而成,分别是幅频特性和相频特性。
稳态系统的输出信号与输入信号的相位之差我们称其为相频特性。
稳态系统输出与输入的幅值之比称为幅频特性。
另外频率响应对稳定系统和不稳定系统都适应,其中稳定系统的频率特性可以通过实验的方法确定。
二、频率特性的几何表示法⏹ 幅相频率特性曲线简称幅相特性曲线,或幅相特性,或极坐标图。
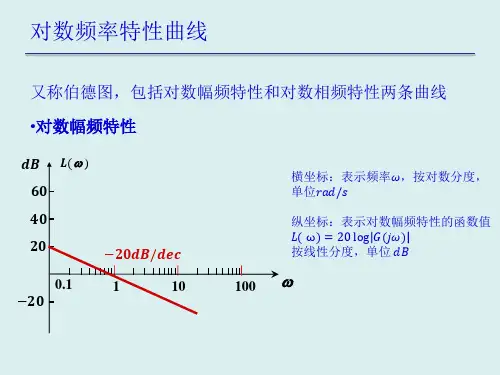
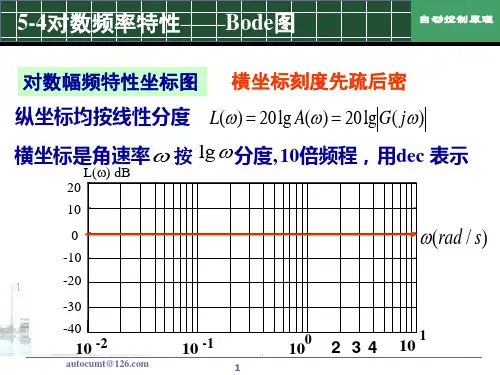
⏹ 对数频率特性曲线又称为伯德曲线或伯德图。
⏹ 对数幅相曲线又称为尼科尔斯曲线或尼科尔斯图。
三、惯性环节频率特性的绘制惯性环节的表达式为: ()11G s Ts =+T 的取值分别为2、4、7,使用MATLAB 软件绘制MATLABA的函数指令如下:指令说明:num为分子指令;den为分母指令;此次画图调用了伯德图画法(bode指令)。
绘制图如下:T=2时。
MATLABA的函数指令如下:绘制图如下:同理当T=4时。
MATLABA的函数指令如下:绘制图如下:四、振荡环节频率特性的绘制振荡环节的传递函数为: ()221=21nnGs ssζωω++在201取值,本次取值分别为0.1 0.3 0.5 0.707 0.85 0.91 1。
方法一:使用伯德图画MATLAB函数程序指令如下:MATLAB图形显示如下:方法二:使用奈奎斯特图画取值分别为0.1 0.3 0.5 0.707 0.85 0.91 1。
MATLAB函数程序指令如下:MATLAB图形显示如下:。