飞思卡尔第九届比赛规则补充
- 格式:doc
- 大小:1.23 MB
- 文档页数:7

第九届“飞思卡尔”杯全国大学生智能车竞赛光电组技术报告学校:中北大学伍名称:ARES赛队员:贺彦兴王志强雷鸿队教师:闫晓燕甄国涌关于技术报告和研究论文使用授权的说明书本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:2014-09-15日摘要本文介绍了第九届“飞思卡尔杯全国大学生智能车大赛光电组中北大学参赛队伍整个系统核心采用飞思卡尔单片机MC9S12XS128MAA ,利用TSL1401线性CCD 对赛道的行扫描采集信息来引导智能小车的前进方向。
机械系统设计包括前轮定位、方向转角调整,重心设计器件布局设计等。
硬件系统设计包括线性CCD传感器安装调整,电机驱动电路,电源管理等模块的设计。
软件上以经典的PID算法为主,辅以小规Bang-Bang算法来控制智能车的转向和速度。
在智能车系统设计开发过程中使用Altium Designer设计制作pcb电路板,CodeWarriorIDE作为软件开发平台,Nokia5110屏用来显示各实时参数信息并利用蓝牙通信模块和串口模块辅助调试。
关键字:智能车摄像头控制器算法。
目录1绪论 (1)1.1 竞赛背景 (1)1.2国内外智能车辆发展状况 (1)1.3 智能车大赛简介 (2)1.4 第九届比赛规则简介 (2)2智能车系统设计总述 (2)2.1机械系统概述 (3)2.2硬件系统概述 (5)2.3软件系统概述 (6)3智能车机械系统设计 (7)3.1智能车的整体结构 (7)3.2前轮定位 (7)3.3智能车后轮减速齿轮机构调整 (8)3.4传感器的安装 (8)4智能车硬件系统设计 (8)4.1XS128芯片介绍 (8)4.2传感器板设计 (8)4.2.1电磁传感器方案选择 (8)4.2.2电源管理模 (9)4.2.3电机驱动模块 (10)4.2.4编码器 (11)5智能车软件系统设 (11)5.1程序概述 (11)5.2采集传感器信息及处理 (11)5.3计算赛道信息 (13)5.4转向控制策略 (17)5.5速度控制策略 (19)6总结 (19)6.1效果 (20)6.2遇到的问题以及解决办法 (20)6.3队员之间的合作很重要 (21)附录 (22)源程序 (23)1绪论1.1 竞赛背景随着经济发展,道路交通面临新的问题和新的挑战。
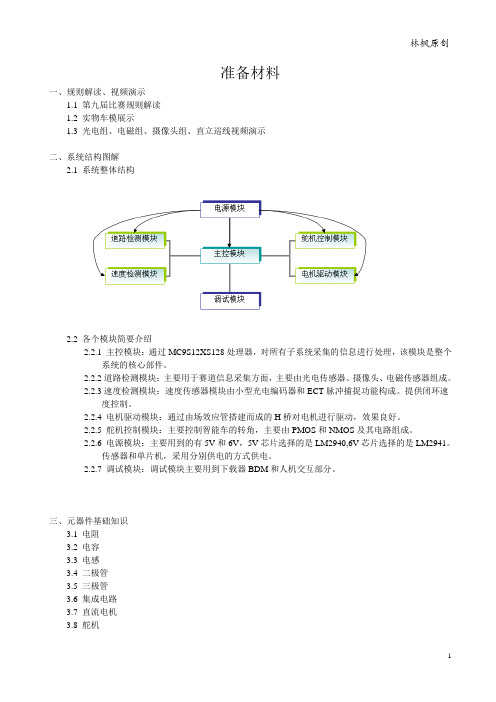
准备材料一、规则解读、视频演示1.1 第九届比赛规则解读1.2 实物车模展示1.3 光电组、电磁组、摄像头组、直立巡线视频演示二、系统结构图解2.1 系统整体结构2.2 各个模块简要介绍2.2.1 主控模块:通过MC9S12XS128处理器,对所有子系统采集的信息进行处理,该模块是整个系统的核心部件。
2.2.2道路检测模块:主要用于赛道信息采集方面,主要由光电传感器、摄像头、电磁传感器组成。
2.2.3速度检测模块:速度传感器模块由小型光电编码器和ECT脉冲捕捉功能构成。
提供闭环速度控制。
2.2.4 电机驱动模块:通过由场效应管搭建而成的H桥对电机进行驱动,效果良好。
2.2.5 舵机控制模块:主要控制智能车的转角,主要由PMOS和NMOS及其电路组成。
2.2.6 电源模块:主要用到的有5V和6V,5V芯片选择的是LM2940,6V芯片选择的是LM2941。
传感器和单片机,采用分别供电的方式供电。
2.2.7 调试模块:调试模块主要用到下载器BDM和人机交互部分。
三、元器件基础知识3.1 电阻3.2 电容3.3 电感3.4 二极管3.5 三极管3.6 集成电路3.7 直流电机3.8 舵机四、常用传感器介绍4.0 补充知识:关于信号量的分类:开关量、模拟量、数字量4.1 红外传感器4.2 超声波传感器4.3 GP红外测距传感器4.4 CMOS图像传感器4.5 角度、加速度传感器4.6 温度传感器4.7 声音传感器4.8 激光传感器4.9 霍尔传感器4.10 陀螺仪4.11 CCD图像传感器五、Proteus仿真软件介绍5.1 简介Proteus是世界上著名的EDA工具(仿真软件),从原理图布图、代码调试到单片机与外围电路协同仿真,一键切换到PCB设计,真正实现了从概念到产品的完整设计。
是目前世界上唯一将电路仿真软件、PCB设计软件和虚拟模型仿真软件三合一的设计平台.5.2 使用演示打开软件——>点击左侧Component Mode——>点击P——>输入lamp——>选择相应的元器件——>点击左侧的分组Switcgs & Relys——>选择按键——>将上述两个元器件放到绘图区域——>点击右键,放置电源和地——>连线——>进行仿真。

目录一、器材限制规定 (3)1、车模 (3)2、电子器件 (6)二、赛场规定 (7)三、裁判及技术评判 (7)四、分赛区、总决赛比赛规则 (7)1.初赛与决赛规则 (7)2、比赛过程规则 (9)3.比赛犯规与失败规则 (9)4.比赛组织说明 (10)五. 其他 (10)附录: (11)附件一:智能竞赛车模的规定 (11)附件二:电路器件及电路制作限制 (11)附件三:赛道规则 (13)须使用竞赛秘书处统一指定的竞赛车模套件,采用飞思卡尔半导体公司的8位、16位、32位微控制器作为核心控制单元,自主构思控制方案进行系统设计,包括传感器信号采集处理、电机驱动、转向舵机控制以及控制算法软件开发等,完成智能车工程制作及调试,于指定日期与地点参加各分(省)赛区的场地比赛,在获得决赛资格后,参加全国决赛区的场地比赛。
参赛队伍的名次(成绩)由赛车现场成功完成赛道比赛时间来决定,参加全国总决赛的队伍同时必须提交车模技术报告。
大赛根据道路检测方案不同分为电磁、光电组与摄像头平衡三个赛题组。
使用四轮车模通过感应由赛道中心电线产生的交变磁场进行路经检测的属于电磁组;使用四轮车模通过指定的线阵CCD器件或者分立的光电管传感器获得一维连续或者离散点赛道信息的属于光电组;使用摄像头进行赛道信息检测,同时保持车体直立行走的车模属于摄像头平衡组。
竞赛秘书处制定如下比赛规则适用于各分(省)赛区比赛以及全国总决赛,在实际可操作性基础上力求公正与公平。
一、器材限制规定1、车模本届比赛指定采用五种车模,分别用于三个赛题组:表格1 车模信息车模:G768 电机RN-260 舵机:FUTABA3010车模型号 电机:540,伺服器:S-D5电机RN-260电机RS-380注:摄像头平衡组可以允许选择不同的C,D,E车模参加比赛。
各赛题组车模运行规则:(a) 电磁组:四轮车模反向运行。
车模使用A型车模。
车模运行方向为:转向轮在后,动力轮在前,如图1所示:图1电磁组车模运行模式注意:第九届电磁组使用的车模与第八届相同,但是车模运行方向是反向运行。
关于举办第九届全国大学生“飞思卡尔”杯智能汽车竞赛的通知有关高等学校教务处:为加强大学生实践、创新能力和团队精神的培养,促进高等教育教学改革,受教育部高等教育司委托(教高司函[2005]201号文,附件1),由教育部高等学校自动化类专业教学指导委员会(以下简称自动化教指委)主办全国大学生智能汽车竞赛。
该竞赛以“立足培养、重在参与、鼓励探索、追求卓越”为指导思想,是以智能汽车为竞赛平台的多学科专业交叉的创意性科技竞赛,是面向全国大学生的一种具有探索性的工程实践活动,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神。
该竞赛分竞速赛、创意赛和技术方案竞赛三类比赛。
竞速赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司的8位、16位、32位微控制器作为核心控制模块,通过增加道路传感器、电机驱动电路以及编写相应软件,制作一部能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。
创意赛在统一比赛平台上,充分发挥参赛队伍想象力,以特定任务为创意目标,完成研制作品,由竞赛专家组观摩作品现场展示、质疑、现场观众投票等环节,最终决定比赛名次。
技术方案比赛是2013年举行的第八届竞赛中新设定比赛组,针对参加全国总决赛的队伍出现的优秀创新方案进行评选,通过现场方案交流展示、专家答辩以及现场参赛队员的投票评出技术方案名次。
技术方案组比赛目标是提高参赛队员创新能力,鼓励队员之间相互学习交流。
该竞赛涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科知识。
该竞赛以飞思卡尔半导体(中国)有限公司(以下简称飞思卡尔)为协办方,已成功举办了八届,曾得到了原教育部副部长吴启迪教授、原高等教育司张尧学司长、国际合作与交流司及高等教育司理工处领导、飞思卡尔公司与各高校师生的高度评价,并发展成全国30个省(自治区)、直辖市的400余所高校广泛参与的全国大学生智能汽车竞赛。

飞思卡尔智能车大赛目录“飞思卡尔杯”智能车大赛起源于韩国,是韩国汉阳大学汽车控制实验室在飞思卡尔半导体公司资助下举办的以HCSl2单片机为核心的大学生课外科技竞赛。
组委会提供一个标准的汽车模型、直流电机和可充电式电池,参赛队伍要制作一个能够自主识别路径的智能车,在专门设计的跑道上自动识别道路行驶,谁最快跑完全程而没有冲出跑道并且技术报告评分较高,谁就是获胜者。
其设计内容涵盖了控制、模式识别、传感技术、汽车电子、电气、计算机、机械、能源等多个学科的知识,对学生的知识融合和实践动手能力的培养,具有良好的推动作用。
全国大学生“飞思卡尔”杯智能汽车竞赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司的8位、16位微控制器作为核心控制模块,通过增加道路传感器、电机驱动电路以及编写相应软件,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。
因而该竞赛是涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的比赛。
该竞赛以飞思卡尔半导体公司为协办方,自2006年首届举办以来,成功举办了五届,得到了教育部吴启迪副部长、张尧学司长及理工处领导、飞思卡尔公司领导与各高校师生的高度评价,已发展成全国30个省市自治区200余所高校广泛参与的全国大学生智能汽车竞赛。
2008年第三届被教育部批准列入国家教学质量与教学改革工程资助项目中9个科技人文竞赛之一(教高函[2007]30号文,附件2),2009年第四届被邀申请列入国家教学质量与教学改革工程资助项目。
参赛选手须使用竞赛秘书处统一指定并负责采购竞赛车模,采用飞思卡尔16位微控制器MC9S12DG128作为核心控制单元,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等,完成智能车工程制作及调试,于指定日期与地点参加各分赛区的场地比赛,在获得决赛资格后,参加全国决赛区的场地比赛。
参赛队伍之名次(成绩)由赛车现场成功完成赛道比赛时间为主,技术方案及制作工程质量评分为辅来决定。

第九届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:西南交通大学队伍名称:Flamingo参赛队员:王文婕安盼盼杨润耀带队教师:蒋朝根吴宗玲关于技术报告和研究论文使用授权的说明本人完全了解第九届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:王文婕安盼盼杨润耀带队教师签名:蒋朝根吴宗玲日期:2014年8月10日目录第一章引言 (1)1.1飞思卡尔智能汽车比赛介绍 (1)1.1.1飞思卡尔智能汽车竞赛简介 (1)1.2.2比赛规则介绍 (2)1.2.3器材限制规定 (2)第二章整体设计方案 (6)2.1整体系统概述 (6)第三章车模机械设计 (7)3.1 车模规格 (7)3.2 舵机的安装 (8)3.3 底盘设计 (9)3.4 CCD的安装 (9)3.5 编码器的安装 (10)3.6 前轮的调整 (10)3.7 后轮的调整 (12)第四章车模电路设计 (13)4.1主控芯片 (13)4.2主控板 (14)4.2.1电源部分 (14)4.2.2 MCU部分 (15)4.3驱动方案 (16)4.4 CCD模块 (17)4.4.1 CCD的大体参数 (17)4.5液晶和键盘模块 (18)4.6无线蓝牙 (18)第五章软件设计 (19)5.1程序整体设计 (19)5.2各模块控制分析 (20)5.2.1 CCD传感器控制 (21)5.2.2 SD-5舵机控制 (26)5.2.3 B车模电机控制 (28)5.3 速度控制相关原理 (30)第六章调试系统说明 (31)6.1蓝牙无线串口 (31)6.2 Labview上位机软件及速度的调试 (32)6.3 上位机软件及信号和巡线的调试 (33)第七章K60的简介 (34)7.1 Kinetis 系列及K60 (34)7.2 K60 开发环境和流程 (35)第八章鸣谢与总结 (37)参考文献 (38)附录 (39)第一章引言第一章引言1.1飞思卡尔智能汽车比赛介绍1.1.1飞思卡尔智能汽车竞赛简介教育部为了加强大学生实践、创新能力和团队精神的培养,在已举办全国大学生数学建模、电子设计、机械设计、结构设计等四大竞赛的基础上,委托教育部高等学校自动化专业教学指导分委员会主办每年一度的全国大学生智能汽车竞赛。
一,直立车原理部分1.1直立行走任务分解第九届飞思卡尔智能车摄像头比赛要求车模在直立的状态下以两个轮子着地沿着赛道进行比赛,相比四轮着地状态,车模控制任务更为复杂。
为了能够方便找到解决问题的办法,首先将复杂的问题分解成简单的问题进行讨论。
车模运动控制任务可以分解成以下三个基本控制任务,如图 2- 1所示:( 1)控制车模平衡:通过控制两个电机正反向运动保持车模直立平衡状态;( 2)控制车模速度:通过调节车模的倾角来实现车模速度控制,实际上最后还是演变成通过控制电机的转速来实现车轮速度的控制。
( 3)控制车模方向:通过控制两个电机之间的转动差速实现车模转向控制。
车模直立和方向控制任务都是直接通过控制车模两个后轮驱动电机完成的。
假设车模电机可以虚拟地拆解成两个不同功能的驱动电机,它们同轴相连,分别控制车模的直立平衡、左右方向。
在实际控制中,是将控制车模直立和方向的控制信号叠加在一起加载电机上,只要电机处于线性状态就可以同时完成上面两个任务。
车模的速度是通过调节车模倾角来完成的。
车模不同的倾角会引起车模的加减速,从而达到对于速度的控制。
三个分解后的任务各自独立进行控制。
由于最终都是对同一个控制对象(车模的电机)进行控制,所以它们之间存在着耦合。
为了方便分析,在分析其中之一时假设其它控制对象都已经达到稳定。
比如在速度控制时,需要车模已经能够保持直立控制;在方向控制的时候,需要车模能够保持平衡和速度恒定;同样,在车模平衡控制时,也需要速度和方向控制也已经达到平稳。
这三个任务中保持车模平衡是关键。
由于车模同时受到三种控制的影响,从车模平衡控制的角度来看,其它两个控制就成为它的干扰。
因此对车模速度、方向的控制应该尽量保持平滑,以减少对于平衡控制的干扰。
三者之间的配合如图 2- 3所示。
下面分别讨论车模任务分解的三个控制的实现方式。
1.2车模平衡控制控制车模平衡的直观经验来自于人们日常生活经验。
一般的人通过简单练习就可以让一个直木棒在手指尖上保持直立。
第九届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告组别:光电组队伍名称:进击者I目录第一章:引言 (5)1.1 赛道尺寸介绍 (5)1.2技术方案介绍 (5)1.2.1 控制系统设计 (5)1.2.2 赛车结构设计 (5)1.3技术报告内容安排 (6)第二章:机械设计(各部分附图说明) (6)2.1 PCB板的安装 (6)2.2车轮的安装与调整 (7)2.2.1 主销后倾角 (7)2.2.2 主销内倾角 (7)2.2.3 车轮外倾角 (7)2.3舵机的安装 (8)2.3.1 舵机延时分析 (8)2.3.2舵机的安装与控制延时解决办法 (10)2.4齿轮传动机械安装 (11)2.5传感器的安装 (11)第三章:硬件电路设计(各部分附图说明) (12)3.1单片机最小系统 (12)3.2路径识别电路设计 (13)3.2.1 CCD接口 (13)3.2.2 起跑线检测电路 (13)3.3电源管理电路设计 (14)3.4电机驱动电路设计 (15)3.5通讯接口电路设计 (15)3.6速度检测模块 (15)3.7现场调试调试模块 (16)3.7.1 SD卡接口 (16)3.7.3 OLED液晶 (16)3.8其他电路 (17)第四章:软件设计 (18)4.1设计思路与控制策略 (18)4.2软件流程图(包括主程序和子程序) (18)4.3 PID控制 (19)4.3.1 PID算法介绍 (19)4.3.2 舵机PD算法 (20)4.3.3 电机PID算法 (20)4.4软件开发环境(包括编程、下载、调试) (21)4.4.1开发工具 (21)4.4.2调试工具 (21)4.4.3 上位机调试 (22)4.5 特殊赛道元素分析 (22)4.5.1十字弯 (22)4.5.2 坡道 (23)4.5.3 起跑线 (23)4.5.4 障碍 (23)第五章:模型车各项参数 (23)5.1 车模基本尺寸(长、宽、高、车重) (23)5.2电路功耗及电容总容量 (23)5.3传感器及伺服电机数量 (23)5.4赛道检测精度、周期 (24)第六章:结论 (24)6.1本赛车特色 (24)6.2存在的问题 (24)6.3改进的措施 (24)附件一:电路源文件 (24)K60最小系统电路 (24)电机H桥驱动电路 (25)电源控制电路 (26)主板集成电路 (26)系统电路PCB板 (27)附件二:控制程序源代码 (27)第一章:引言1.1 赛道尺寸介绍在初赛阶段时,跑道所占面积在5m×7m 左右,决赛阶段时跑道面积可以增大。
第九届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:南昌航空大学队伍名称:迅捷斥候队参赛队员:李良明廖章祥王广祥带队教师:陈黎娟赵珂关于技术报告和研究论文使用授权的说明本人完全了解第九届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:目录第一章引言 (1)第二章机械结构部份的设计及调整 (3)2.1 整体结构布局 (3)2.2 前轮定位和后轮差速 (4)2.3 线性CCD的安装 (5)2.4 舵机的安装 (5)2.5 编码器的安装 (6)第三章智能车硬件电路方案设计 (7)3.1 系统硬件设计方案 (7)3.2 电源管理模块 (9)3.3 电机驱动模块 (11)3.4 路径传感器模块设计 (12)3.5 测速模块电路设计 (14)第四章系统的软件设计及算法实现 (15)4.1 程序流程图 (15)4.2 图像处理算法 (16)4.3 控制策略 (17)第五章智能车辅助调试 (19)5.1 开发工具 (19)5.2 辅助调试工具 (19)第六章智能车主要技术参数 (22)第七章总结 (23)参考文献 (I)附录 .............................................................................................................................. I I第一章引言智能车是一种高新技术密集型的新型汽车,它涵盖的范围广泛包括模式识别、传感器技术、自动化控制实现、电力电子技术、计算机技术等多个领域。
在国际上已经形成智能汽车研究、设计、开发、竞赛的热潮。
第九届全国大学生“飞思卡尔”杯智能汽车竞赛
竞赛细则补充说明
版本2014,6,25
第九届全国大学生智能汽车竞赛在比赛赛道元素和车模运行模式等方面相对往届做了修改。
根据近期汇总参赛队伍通过竞赛网站和电子邮件向竞赛秘书处就比赛规则所提出的疑问和建议,本文将比赛规则中一些技术细节做进一步的明确,便于参赛队伍准备比赛。
随着参赛队伍对于竞赛规则的提问要求,竞赛秘书处将会逐步对本文档进行补充。
请同学们及时关注本文档的最新版本内容。
版本修改记录
●版本2014,6.25:增加了比赛各阶段赛道存在形式表格1.
增加了对于车模车轮粘性检测的标准说明,增加了图8.
增加了坡道设计参考图,图1.
●版本2014.5.27:对图6进中的参数进行了修改;
●版本2014,5,10:对图6进中的参数进行了修改;
补充说明车模路过强制调头区可以采用的两种方案。
●版本2014,4,14:补充了强制调头区的参考设计方案。
●版本2014,3,31:修正了图3,图4;增加了图9,图10。
●版本2013,3,25: 文档的最初版本。
赛道元素
第九届比赛赛道存在期终元素,它们在比赛各阶段出现的情况如下表所示。
表格1 比赛各阶段赛道元素存在情况
在预赛阶段两场比赛中,车模沿着赛道运行的方向不同。
综合两场比赛的最好成绩确定预赛排名。
决赛阶段,只进行一场比赛,车模运行方向只有一个。
1、 坡道设计参考
规则中规定的坡道的最大斜率为30°。
考虑到车模底盘的高度和车模前段的长度的限制,将竞赛中的坡道的最大角度设定为20°。
参赛队伍在设置制作坡道的时候,可以参照以下设计。
其中:坡面的长度约为50cm ;坡面的斜率约为20°;坡面过度阶段的弧度半径约为10cm 。
图 1坡道的参考设计方案
345.1°
245
Ø20
单位:厘米
注意,在实际比赛中,坡道的上下坡的角度有可能是不一致的。
比如,可能一边是20°,一边则是15°。
2、 电磁组赛道直角距离
电磁组赛道中存在直角元素。
为了避免赛道之间的强干扰,特别是在直角拐弯处的影响,规定电磁组赛道中,如果存在相邻的直角弯道,则两直角之间的距离不小于100厘米。
直角弯道包括两种情况,一是十字交叉路,二是普通的直角弯道。
图 2电磁组赛道直角间距大于等于100cm
3、电磁组路面的铺设
第九届比赛规则中,电磁组赛道没有边界,同时对于比赛路面材料也没有做统一的规定。
原本这项改动是为了便于电磁组比赛场地的布置,增加比赛场地的多样性。
考虑到参赛队伍能够充分准备比赛,在现场铺设电磁组赛道的时候,将会沿着电磁线铺设单层KT板,铺设的KT板的边缘两边距离中心线大等于30厘米,形状不确定。
图3 电磁组的背景示意图
4、电磁组赛道标志放置和判断通过标准
电磁组赛道没有边界限制,为了便于裁判判定车模是否按顺序通过所有的赛道,在电磁组赛道上会有车模经过标志。
标识是有红色线段组成,线段本身宽度没有规定,但不超过1厘米宽。
标示距离直接弯道的距离不小于50厘米。
标识尺寸和放置位置示意图如下图所示:
图4电磁组赛道标志和放置示意图
车模必须四个轮子都通过标识中心线才算作正确通过标示线。
不通过的标准参见冲出赛道的标准,即有两个及以上的轮子超出标示线,则记为不通过标示线。
如下图所示:
图5车模的四个轮子通过标识中心线
(红色表示标志线,矩形块表示车轮)
5、强制调头区(人字弯道)设计参考方案
强制调头区应用于第九届的光电组和摄像头组。
为了便于参赛队伍准备这种赛题类型,如下给出了强制调头区的一种参考设计方案。
图6 调头区参考设计图
在分赛区(省赛区)的过程中,强制调头区只出现在决赛过程中。
决赛场地一般会由两块大小相同,左右对称的赛道组成。
强制调头区一般会出现在这两块场地的连线中间。
如下图所示。
图7 强制调头区的安排示意图
车模通过强制调头区的时候,可以采用两种方式:一种是利用进入调头区对车模运行模式进行调整后再退出调头区继续行驶;另一种就是通过控制车模速度和方向不进入调头区直接通过该路口。
如下图所示。
这两种方式都要求车模不冲出赛道。
车模
1、车轮
参赛车模的车轮需要是原车模配置的车轮和轮胎,不允许更改使用其它种类的车轮和轮胎,不同类型的车模之间也不允许交叉使用轮胎和车轮。
不允许增加车轮防滑胶套。
如果车轮损坏,则需要购买原车模提供商出售的车轮轮胎。
允许对于车轮轮胎做适当打磨,但要求原车轮轮胎花纹痕迹依然能够分辨。
不允许对于车轮胎进行雕刻花纹。
对于B性车模,如果使用往届的车模参加比赛,其中的车轮需要更换成今年比赛的车轮。
参赛队伍的轮胎表面不允许有强烈粘性物质,检测标准如下:
车模在进入赛场之前,车模平放在地面A4打印纸上,端起车模后,A4打印纸不被粘连离开地面。
检查过程如下图所示:
图 8车模轮胎粘性检查标准
2、 车模电池位置
允许更改车模电池的安装位置,但要求电池外轮廓距离车模底盘及其附属物的最短距离不得超过30mm 。
图 9 车模底盘及其附属物示意图
电池距离车模底盘最小距离的示意图如下:
电池
底盘、电机或车轮支架
E 车模编码器支架电池外轮廓
距离底盘的最小距离不大于30mm 。
图 10 电池距离车模底盘最小距离的示意图
欢迎同学们就比赛规则相竞赛秘书处提出你们的意见和建议。
此外,在准备竞赛的过程中,也要充分考虑比赛规则的复杂性和多样性,在准备竞赛硬件和软件方案的时候,需要留有必要的修正空间,便于在竞赛现场根据赛道元素和比赛环境的具体情况,能够适应比赛现场的要求并完成现场的比赛。
考虑规则的一致性,对于本文档中相关的问题的回复如果和之前同学们通过网站提问和电子邮件询问的结果不一致,则以本文档为准。
在暑期比赛的时候,将会以本文档的结论作为各赛区设计比赛现场的依据。
全国大学生智能汽车竞赛秘书处
2014,6,25。