基于模糊纠偏控制的磁导航AGV设计与实现
- 格式:pdf
- 大小:1.04 MB
- 文档页数:6
基于模糊控制器的磁引导AGV路径自动校正研究曾炫;任彧【摘要】磁引导AGV(自动引导车)系统作为一种实用且相对稳定的引导系统被广泛应用于工业中。
在应用中由于系统的建模误差,外界干扰及其他不确定因素,小车会出现偏离其规划路径的情况。
为改进偏离误差,对AGV系统中路径导航模块进行了改进,建立了一个利用模糊控制器来实现在路径规划中进行路径校正的系统,并对系统进行了建模与仿真分析实现。
由实验结果分析,系统能够较好地进行路径的校正与跟踪。
%As a useful and robust method for guiding AGVs , magnetic guide method is widely used in industry .There are many deviations , which caused by modeling error , interferes and other uncertainties .Thus leading AGV deviated from there orbit .Fuzzy control algorithm is widely used in industrial systems .Aiming at improving this situation , a path correction system which using fuzzy controller to achieve better path orbit is designed .The simulation analysis was carried using MATLAB software , and the result indicates that the algorithm is effective .【期刊名称】《杭州电子科技大学学报》【年(卷),期】2015(000)001【总页数】5页(P58-62)【关键词】模糊控制;路径校正;自动引导车;磁引导【作者】曾炫;任彧【作者单位】杭州电子科技大学计算机学院,浙江杭州310018;杭州电子科技大学计算机学院,浙江杭州310018【正文语种】中文【中图分类】TP273+.4自动引导运输车(Automated Guided Vehicle, AGV)的应用已遍及各行各业,但也遭遇多种实际发展问题的阻扰。
《装备制造技术》2018年第07期0前言自动引导小车AGV (automated guided vehicle ),是现代物流系统中的重要成员[1],它具有自动化集成度高、柔性好、可靠性高、自动导航运行、安装便利及使用方便等特点[2]。
AGV 的导航方式众多,包括视觉导航、GPS 导航、激光导航、磁带导引[3]。
其中磁带导引由于实现简单,造价便宜,抗干扰能力强在工程领域应用最广。
磁导航AGV 的控制方法较常用的即传统的PID 控制,文献[4]用双磁导引方式得出AGV 的位置偏差和角度偏差然后用pid 算法实现车速的控制,但由于AGV 本身的非完整约束特性和非线性加上传感器精度不够[5],传统的控制方法控制效果不佳且实现复杂,在以PLC 为核心的控制系统上很难实现。
故本文采用模糊控制方法进行AGV 路径跟踪控制。
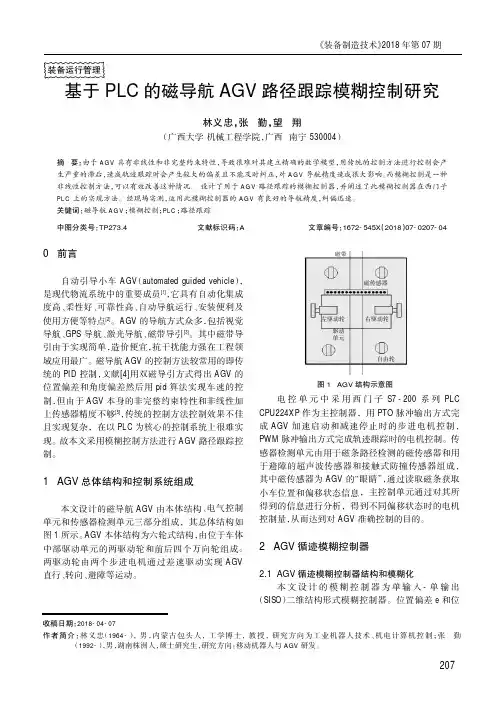
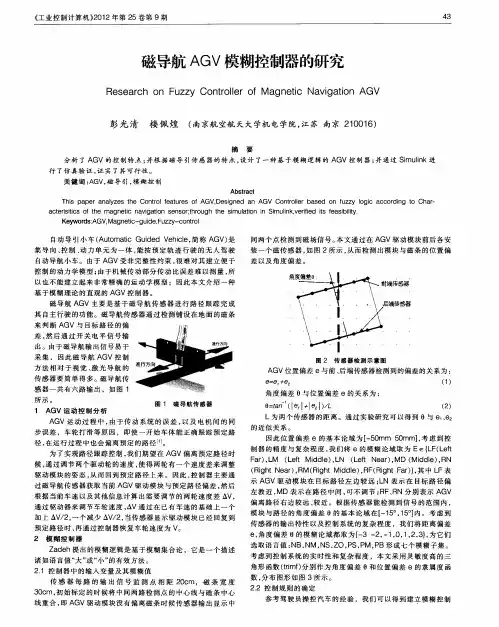
1AGV 总体结构和控制系统组成本文设计的磁导航AGV 由本体结构、电气控制单元和传感器检测单元三部分组成,其总体结构如图1所示。
AGV 本体结构为六轮式结构,由位于车体中部驱动单元的两驱动轮和前后四个万向轮组成。
两驱动轮由两个步进电机通过差速驱动实现AGV 直行、转向、避障等运动。
电控单元中采用西门子S7-200系列PLC CPU224XP 作为主控制器,用PTO 脉冲输出方式完成AGV 加速启动和减速停止时的步进电机控制,PWM 脉冲输出方式完成轨迹跟踪时的电机控制。
传感器检测单元由用于磁条路径检测的磁传感器和用于避障的超声波传感器和接触式防撞传感器组成,其中磁传感器为AGV 的“眼睛”,通过读取磁条获取小车位置和偏移状态信息,主控制单元通过对其所得到的信息进行分析,得到不同偏移状态时的电机控制量,从而达到对AGV 准确控制的目的。
2AGV 循迹模糊控制器2.1AGV 循迹模糊控制器结构和模糊化本文设计的模糊控制器为单输入-单输出(SISO )二维结构形式模糊控制器。
位置偏差e 和位基于PLC 的磁导航AGV 路径跟踪模糊控制研究林义忠,张勤,望翔(广西大学机械工程学院,广西南宁530004)摘要:由于AGV 具有非线性和非完整约束特性,导致很难对其建立精确的数学模型,用传统的控制方法进行控制会产生严重的滞后,造成轨迹跟踪时会产生较大的偏差且不能及时纠正,对AGV 导航精度造成很大影响。
基于模糊控制的导航系统优化设计一、引言在当今科技飞速发展的时代,导航系统在人们的日常生活和众多领域中发挥着至关重要的作用。
从汽车导航帮助我们在复杂的道路网络中找到最佳路径,到无人机的精准定位与飞行控制,导航系统的准确性和可靠性直接影响着我们的出行效率和安全。
然而,传统的导航系统在面对复杂多变的环境和不确定的因素时,往往表现出一定的局限性。
为了进一步提高导航系统的性能,模糊控制技术应运而生,并为导航系统的优化设计提供了新的思路和方法。
二、模糊控制的基本原理模糊控制是一种基于模糊逻辑的智能控制方法,它模仿人类的模糊思维和决策过程,能够处理那些难以用精确数学模型描述的复杂系统。
在模糊控制中,输入变量被模糊化,即通过隶属函数将精确的输入值转换为模糊集合。
然后,根据预先设定的模糊规则进行模糊推理,得到模糊的输出结果。
最后,通过解模糊化将模糊输出转换为精确的控制量。
模糊控制的核心在于模糊规则的制定。
这些规则通常是基于专家经验或大量的实验数据总结得出的,它们描述了输入变量与输出变量之间的模糊关系。
例如,在导航系统中,可以制定这样的模糊规则:“如果距离目的地较远且交通拥堵程度较高,那么导航速度应该较慢”。
三、传统导航系统的局限性传统的导航系统通常基于精确的数学模型和算法,如Dijkstra 算法、A算法等。
这些算法在处理已知的、确定性的环境时能够提供较为准确的导航结果。
然而,在实际应用中,导航系统面临着诸多不确定性和复杂性。
例如,交通状况的实时变化、道路施工、天气条件等因素都会对导航结果产生影响。
传统导航系统往往难以准确预测这些不确定性因素,导致导航路线不够灵活和适应性差。
此外,传统导航系统在处理用户的模糊需求时也存在困难。
比如,用户可能希望选择一条“风景较好但路程稍长”的路线,而传统导航系统难以理解和满足这种模糊的需求。
四、基于模糊控制的导航系统优化设计(一)输入变量的选择与模糊化在基于模糊控制的导航系统中,需要选择合适的输入变量。
基于模糊算法的AGV纠偏控制AGV(自动引导车)技术在现代物流系统中扮演着重要角色,但由于环境的复杂性和设备的不稳定性,AGV在实际工作中容易出现纠偏问题,因此需要一种可靠的控制方法来减少纠偏误差。
本文将介绍一种基于模糊算法的AGV纠偏控制方法,以提高AGV的定位准确性和导航性能。
1. 引言AGV是一种能够自主移动和导航的机器人,被广泛应用于物流仓储、制造业等领域。
然而,在实际工作中,由于地面路面不平、传感器误差、车辆积尘等原因,AGV很容易出现纠偏问题,导致其无法准确地按照预定路径运行,甚至偏离轨道。
因此,如何实现高精度的AGV纠偏控制成为一个关键问题。
2. AGV纠偏方法综述目前,实现AGV纠偏控制的方法有很多种,如PID控制、状态反馈控制和模糊控制等。
其中,模糊控制因其适应性强、鲁棒性好等特点,在AGV纠偏控制中得到了广泛应用。
3. 模糊算法原理模糊算法是一种基于模糊逻辑理论的控制方法,它将模糊集合论引入控制领域,以解决问题的模糊性和不确定性。
模糊控制器由模糊规则库、模糊推理机和模糊解模块组成,其中模糊规则库存储了专家知识,模糊推理机通过模糊规则库进行推理,得到模糊输出,最后经过解模糊得到确定性控制信号。
4. 基于模糊算法的AGV纠偏控制流程基于模糊算法的AGV纠偏控制流程主要包括传感器数据获取、纠偏误差计算、模糊推理、控制信号生成和执行等几个步骤。
首先,通过传感器获取AGV当前位置和姿态信息;然后,根据设定的目标路径计算纠偏误差;接着,通过模糊推理将纠偏误差映射为控制规则;最后,根据控制规则生成控制信号,并执行控制动作使AGV按照预定路径运行。
5. 模糊规则库设计模糊规则库是模糊控制器的核心,其合理的设计直接影响到控制结果的准确性和稳定性。
在设计模糊规则库时,需要考虑AGV纠偏控制所需的输入变量、输出变量和相应的术语集,通过专家经验和实验数据构建合适的模糊规则。
6. 实验与结果分析为了验证基于模糊算法的AGV纠偏控制方法的有效性,我们进行了一系列实验。
基于模糊纠偏控制的磁导航AGV设计与实现李照;舒志兵【期刊名称】《电子器件》【年(卷),期】2017(040)006【摘要】AGV作为一种典型的非完整约束型机器人,在工业和物流业中用于组建高效、快捷的物流系统.在电磁引导的基础上提出一种智能的控制方式,使AGV在工作中具有较强的稳定性、较快的响应速度和自动纠偏的能力.当AGV在运行过程中产生位置偏差和角度偏差时,使用模糊控制来调控AGV两个主动轮的速度,保证AGV运行于预定的轨迹.最后通过使用SIMULINK仿真验证AGV的纠偏能力,并在工业现场验证了AGV系统所需实现的功能,证明了该系统达到了速度快反应、智能化、稳定性强的要求.%AGV( Automatic Guideding Vehicle) is a typical nonholonomic constraint robot,in the industry and logistic industry being used for the formation of efficient,fast logistic system. In order to make AGV strong stability,faster response speed and the ability to automatically correct,an intelligent control method is presented based on electromag-netic guidance. When it works,AGV will generate position deviation and the angular deviation. Aimed at correcting this,using fuzzy control adjusts the speed of the two driving wheels of the AGV to ensure that the AGV runs on a predetermined trajectory. Finally,the SIMULINK simulation is used to verify the error correction ability of AGVand at the same time,the function of AGV system is verified in industrial field. It is proved that the system meets the require-ments of fast response,intelligence and stability.【总页数】6页(P1426-1431)【作者】李照;舒志兵【作者单位】南京工业大学电气工程与控制科学学院,南京211800;南京工业大学电气工程与控制科学学院,南京211800【正文语种】中文【中图分类】TM341【相关文献】1.基于三菱PLC的AGV磁导航PID模糊控制与实现 [J], 赵靖;李锻能;王冲2.背负式磁导航AGV纠偏控制系统设计 [J], 刘淑晶;刘金华;吴乐;李欢欢;徐小龙3.基于麦克纳姆轮的磁导航AGV纠偏控制研究 [J], 孙立新; 王传龙; 高菲菲; 杨兴宇4.磁导航AGV纠偏控制模型的研究与设计 [J], 何翠; 杨光永; 史雄峰; 徐天奇5.基于PLC的磁导航AGV路径跟踪模糊控制研究 [J], 林义忠;张勤;望翔因版权原因,仅展示原文概要,查看原文内容请购买。
磁导航AGV控制系统的设计与实现
郑炳坤;赖乙宗;叶峰
【期刊名称】《自动化与仪表》
【年(卷),期】2014(29)3
【摘要】为保证磁导航AGV控制系统的可扩性与稳定性,提出一种基于CAN总线的控制系统,其硬件架构以嵌入式工控机为核心,通过CAN总线挂接多个控制外围设备的ARM处理器.重点给出了系统运动控制器与监控管理系统的实现方案.基于中断任务调度模式实现了运动控制器,由模糊自整定PD调节器来改良AGV的动态跟踪行为;监控管理系统包括六种交互模块,其发送与接收通信过程通过适时线程挂起与逐步接收匹配操作来协作完成.经现场实测,AGV工作稳定可靠,跟踪效果良好.【总页数】5页(P6-10)
【作者】郑炳坤;赖乙宗;叶峰
【作者单位】华南理工大学机械与汽车工程学院,广州510640;华南理工大学机械与汽车工程学院,广州510640;华南理工大学机械与汽车工程学院,广州510640【正文语种】中文
【中图分类】TP24
【相关文献】
1.基于模糊纠偏控制的磁导航AGV设计与实现 [J], 李照;舒志兵
2.基于STM32的磁导航AGV控制系统设计 [J], 刘笑;郑恩让
3.单向潜伏式AGV磁导航控制系统的设计与实现 [J], 王彪;盘书宝;蒙若港
4.单向潜伏式AGV磁导航控制系统的设计与实现 [J], 王彪; 盘书宝; 蒙若港
5.磁导航AGV路径跟踪控制系统设计 [J], 苗静静;牛萍娟
因版权原因,仅展示原文概要,查看原文内容请购买。
AGV磁导航设计方案AGV磁导航设计方案自动导引车(AGV)是一种智能物流设备,其作为自动化生产线的一部分,将材料、成品和工件从一个工作站或部门运输到另一个工作站或部门。
AGV系统可以大幅提高物流效率和工作安全性,减少人为错误的发生,提升生产线的整体效率和生产质量。
AGV系统中一个比较重要的组成部分就是磁导航系统。
在本文中,我们将介绍AGV磁导航设计方案。
1. 磁导航原理磁导航是一种基于地磁场变化的导航技术。
常见的地磁场变化源于磁场不均匀、地下管道、电缆等人造干扰以及地磁场自然变化等。
与其他传统导航技术不同,磁导航技术采用磁感应原理,并完全依赖于磁场变化来确定位置。
通过在AGV车体上安放一组磁感应探测器,可以测量环境磁场的强度和方向,从而实现车体的定位和导航。
2. AGV磁导航设计方案(1)磁线路布局设计在磁导航系统中,磁力线路是AGV车体导航的基础。
磁力线路由磁条和磁性标志构成,通过磁感应探测器来感应积聚在两个磁条间的磁场强度,从而实现车身的定位。
磁力线路的布局需要考虑车体运动轨迹、交通流量、起始点和终点等多个因素。
通常,磁力线路布局应按照一定的规划方案进行,包括主干线、支路、交叉路口等,确保AGV车体可以沿着预设的路径正常运行。
磁导航系统中的磁条种类和形状很多,可以通过工厂现场实际情况进行搭配,满足不同条件下的定位和导航需求。
(2)磁感应探测器设计磁感应探测器是磁导航系统的重要控制单元,它搭载在AGV车体上,负责感应场强、分析场向、控制车体方向等功能。
AGV车体上磁感应探测器的数量和型号取决于导航系统的设计,通常,一辆AGV车体上搭载三个或以上磁感应探测器。
磁感应探测器的设计需考虑到力量和大小,以确保探测器贴附到车体上不会影响车辆的正常运行。
此外,探测器的工作电压和输入电流等参数也需要进行计算和测试。
(3)控制系统设计磁导航系统的控制系统由AGV车体上的电子组件和控制软件组成。
在车体上根据磁场变化数据,控制电机转向,同时控制车速,沿着确定的磁力线路移动。
基于磁导航的agv转弯和校偏算法研究与设计AGV(自动导引车)是一种智能化物流设备,广泛应用于仓储物流、生产制造等领域。
磁导航技术作为AGV的核心定位和导航方式之一,对于AGV的转弯和校偏算法设计至关重要。
本文将围绕基于磁导航的AGV转弯和校偏算法展开研究与设计,以分析其原理、探讨算法优化方法,并提供相应的指导意义。
首先,我们来了解基于磁导航的AGV的工作原理。
磁导航是通过在地面铺设特殊的磁导带,AGV通过感应磁导带产生的磁场信息,来确定自身的位置和方向。
当AGV行驶到转弯和校偏的地方时,需要进行特殊的算法设计来实现平稳的转弯和自动校偏。
对于AGV的转弯算法设计,最常见且简单的方法是使用PID控制算法。
PID控制算法通过测量AGV当前位置与目标位置之间的误差,并根据误差的大小来调整AGV的转弯角度。
其控制过程主要分为比例、积分和微分三个环节。
比例环节根据误差大小来计算输出量,积分环节用于消除比例环节的静态误差,微分环节用于预测误差的变化趋势,从而使得AGV能够平衡地完成转弯操作。
在设计转弯算法时,还需要考虑AGV的机械结构和动力系统。
如果AGV的转弯半径较大,设计一个简单的PID控制算法即可。
然而,对于转弯半径较小的AGV,还需要考虑非线性因素的影响,例如转向角度与速度之间的关系。
在这种情况下,可以采用模糊控制算法或者神经网络控制算法进行优化,以实现更精确和稳定的转弯操作。
对于AGV的校偏算法设计,主要考虑的是避免AGV在行驶过程中偏离磁导带导致定位错误。
一种常见的方法是使用偏离角度检测算法,通过测量AGV当前位置和磁导带之间的角度偏差,并通过调整AGV的转向角度来使其保持在磁导带上行驶。
此外,还可以采用视觉识别算法,通过安装摄像头等设备来实时识别磁导带,从而实现校偏操作。
在算法设计过程中,还需要充分考虑AGV的实际应用环境和工作要求。
例如,如果AGV在转弯时需要尽量保持稳定性,可以通过增加转弯半径或者减小转弯速度来实现。
AGV搬运机器人设计方案AGV即自动导向小车(Automated Guided Vehicle)被作为搬运机器人广泛使用,应用于自动化仓储系统、柔性搬运系统和柔性装配系统等物流系统。
AGV 是以蓄电池作为电源,用某种导航方式控制其运行路线的自动化智能搬运设备。
AGV 具有良好的柔性和较高的可靠性,能够减少工厂对劳动力的需求,提高产品设备在运输中的安全性且安装容易,维护方便。
在AGV 的应用环境中,往往由多台AGV 组成自动导向小车系统,该系统是由AGV、导引系统、管理系统、通信系统、停靠工位以及充电工位等组成的自动化AGVs 系统。
AGVs 的上位机管理系统通过通信系统与系统内的AGV 通信,优化AGV 的作业过程、控制AGV 的运行路线、制定AGV 的搬运计划和监控AGV 的运行状态。
AGVs 易于和其他自动化系统集成,容易扩展。
1、AGV导引方式1)视觉导航视觉导引是在AGV 的运行路径上设置导向标线,通过装在AGV 上的摄像机系统动态地获取导向标线图像,计算AGV 相对于标线的距离和角度偏差,从而控制AGV 沿着标线运行的导引方式。
该种导引方式精度较高,路径变更容易,但对地面洁净度有一定要求,同时成本相对较高。
2)磁导航磁导航被认为是一项非常有应用前景的技术,主要通过测量路径上的磁场信号来获取车辆自身相对于目标跟踪路径之间的位置偏差,从而实现车辆的控制及导航。
磁导航具有很高的测量精度及良好的重复性,磁导航不易受光线变化等的影响,在运行过程中,磁传感系统具有很高的可靠性和鲁棒性。
磁条一旦铺设好后,维护费用非常低,使用寿命长,且增设、变更路径较容易。
2、AGV组成单元磁导航AGV 系统的技术构成如图1所示。
主要包括导向单元、驱动单元、车体、移载单元、供电单元、安全辅助单元,站点识别单元,通讯单元和主控单元。
其中导向单元、驱动单元和主控单元是AGV 技术的核心技术。
图1 磁导航AGV 系统技术构成图1)导向单元导向单元采用磁导航传感器,安装在AGV 车体前方的底部,磁导航传感器利用其内置的6个采样点,能够检测出磁条上方一定程度的微弱磁场,每一个采样点都有一路信号对应输出,当采样点采集到磁场信号时,该路信号就会输出低电平,而没有采集到磁场信号的信号输出则为高电平。
磁导航AGV分段模糊PI控制器设计马平;肖全;邝锦祥;张智阳【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2017(17)12【摘要】为了提高3C产品的自动化生产效率,以STM32F407ZGT6单片机为系统控制器核心,对磁敏传感器组寻迹的滚筒式AGV设计了16位磁敏传感器的阵列布置形式,并根据此形式以及磁导引滚筒式AVG的寻迹约束条件和行走要求提出了路径的识别与轨迹跟踪算法,即分段模糊PI控制算法,以适应AGV小车在直行、转弯和停车三种状态下存在的位置偏差和角度偏差的控制.运用Matlab软件中Simulink模块搭建模糊控制器的仿真模型,对AGV的轨迹跟踪进行仿真,并进行了实际行走测试.AGV行驶时路径偏差保持在8 mm以内,可保证AGV稳定准确地跟踪预设路径,且具有较强的鲁棒性.%In order to improve the efficiency of the automated production of 3C product ,an array arrangement for sensors about the 16 po-sition magnetic sensor group tracing cylinder sensor of the AGV is designed ,which uses STM32F407ZGT6 microcontroller as the core of the system controller .A path identification and trajectory tracking algorithm on the basis of the form are proposed .By using the subsec-tion fuzzy PI control method ,the position deviation and angle deviation of the AGV trolley in the three states of straight -line ,turning and parking can be controlled .Then the Simulink module is used to build a simulation model of the fuzzy controller to simulate the trajectory tracking of theAGV .Eventually an actual walking test is carried out .The AGV can be keptwithin 8 mm and can stably track the refer-ence path under various conditions with high accuracy and robustness .【总页数】5页(P59-63)【作者】马平;肖全;邝锦祥;张智阳【作者单位】广东工业大学机电工程学院,广州 510006;广东工业大学机电工程学院,广州 510006;东莞台一盈拓科技股份有限公司;广东工业大学机电工程学院,广州 510006【正文语种】中文【中图分类】TP273【相关文献】1.磁导航AGV模糊控制器的研究 [J], 彭光清;楼佩煌2.STM32单片机的四驱磁导航AGV控制器设计 [J], 史雄峰;杨光永;陈跃斌3.基于磁导航的猪场环境AGV控制器设计 [J], 董秋伟;潘振永;马明江;耿艳利4.基于STM32的AGV分段式PID磁导航方案研究 [J], 林义忠; 望翔; 张勤5.磁导航AGV路径跟踪控制系统设计 [J], 苗静静;牛萍娟因版权原因,仅展示原文概要,查看原文内容请购买。
自主导航小车 (AGV)轨迹跟踪的模糊预测控制分析摘要:近几年,轮式机器人运行常见轨迹跟踪问题逐渐为人们所熟知,现有研究更倾向于以差速驱动机器人为主体,通过深入研究运动控制问题的方式,提出相应观点。
本文同样以差速模型为研究对象,通过全局跟踪的方式,一方面,多角度分析预测控制算法,在模糊规则的指导下,实时调整控制律常见误差权值,随着AGV得到控制,跟踪设定轨迹的目标自然能够实现。
另一方面,基于仿真实验,对设计所得算法是否有效且可行加以验证,并获得实证有效的结论。
关键词:轨迹跟踪;自主导航小车;模糊预测控制前言:AGV是无人生产车间自动搬运物料所使用主要工具,只有智能AGV才能使物料被安全、快速且准确的搬运到特定位置,不受外界环境干扰。
要想确保处于运行状态的AGV能够自动探索外界环境并选择最优路径,对物料搬运所设定轨迹进行跟踪,关键是围绕轨迹跟踪展开分析,可以说,轨迹跟踪是否准确,通常会给AGV搬运任务完成速度和质量带来直接影响,本文所讨论项目的价值有目共睹。
1自主导航小车运动模型有关人员对现有研究的内容进行了整理,分别指出了研究的优势与不足。
例如,国外某学者基于跟踪系统对应误差模型,对控制律进行了设计,但设计律只能做到局部跟踪,其他学者以全局跟踪控制为最终目的,将动态反馈所获得指数收敛作为主要依据,对跟踪控制律进行了设计,即便如此,该设计仍有制约控制效果的因素存在,即奇异点,另外,控制器维数远超出合理范围。
此后,国内学者以上述研究为依据,创造性的提出了一维控制器,旨在使系统不存在奇异点,但系统对模型角速度有极为严格的要求,在经过反复试错和改进后,差速驱动AGV应运而生,这也是本文所研究的重点。
为了降低研究难度,有关人员基于AGV、工作空间,对坐标系进行了建立,而用来表示跟踪轨迹的公式为。
随后,基于工作空间坐标系,对AGV坐标系原点加以表示,坐标系X轴和原点的夹角,便代表AGV的位姿。
将差速驱动AGV运行速度设定为,在AGV按照预定速度对预设轨迹进行跟踪的过程中,有关人员仅需对AGV驱动轮速度加以控制即可。
技术与应用摘要:为了提高移动机器人移动精度和动作效率,提出了一种模糊迭代算法,并进行了仿真。
首先对AGV小车的工作原理进行分析,在分析迭代控制的基础上对AGV小车路径纠偏进行研究,并设计了模糊预测迭代算法的控制器。
为了验证方案的可行性,进行了仿真调试,结果表明:采用模糊预测迭代算法的PI控制器比传统的PI控制器具有小的超调,高鲁棒性,误差小,更接近于期望的方波信号。
该控制系统具有较高的控制精度,将该控制器引入到移动AGV控制系统中是可行的。
关键词:AGV小车;模糊预测;控制器;导航中图分类号:TP273.4文献标识码:A文章编号:1671-9123(2019)01-0123-05收稿日期:2018-12-11基金项目:河南省科技厅科技攻关项目(182102210479);三门峡市科技发展计划项目(2017010105)作者简介:葛笑寒(1983—),男,河南三门峡人,三门峡职业技术学院电气工程学院讲师。
随着工业4.0的快速发展,工厂集成化程度越来越高。
作为工厂连接设备之间的运输机器人(AGV)广泛应用。
运动过程中需对AGV精确导航才能保障AGV达到目标[1]。
常用的AGV导航有惯性导航、激光引导、光学导航方式和磁带引导等方式。
工业中常用磁带引导方式,该种方式主要是通过AGV小车感应磁条产生的磁性信号实现导航,根据传感器捕获的信号进行偏差纠正,最后通过开关信号控制左右轮的方向[2]。
一般情况下,所有路径都需要铺设磁条。
此种导航方式易于实现,但AGV只能沿磁条行走,无法通过控制任务更改路径,且磁条易损,维护成本高。
另外AGV小车以生产顺序等进行工作,要满足生产柔性和多样化的要求,即控制系统存在着非线性和数学模型不定的因素,采用一般的智能控制效果不好。
所以,提出一种模糊迭代学习算法来完成导航,并实现行进过程中自动纠偏,实现系统的精确控制。
基于模糊预测迭代算法的AGV导航研究◎葛笑寒(三门峡职业技术学院电气工程学院,河南三门峡472000)技术与应用/1231AGV工作原理系统主要由主控模块、外围输入模块、通信模块和驱动模块构成(如图1所示)。