CORDIC算法原理及实现
- 格式:ppt
- 大小:375.00 KB
- 文档页数:53
CODIC算法原理---------------------------------------------------------------------------------------------------------------------------------------------------------- ---------------------------------------------------------------------------------------------------------------------------------------------------------- ---------------------------------------------------------------------------------------------------------------------------------------------------------- -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- ---------------------------------------------------------------------------------------------------------------------------------------------------------- ---------------------------------------------------------------------------------------------------------------------------------------------------------- ----------------------------------------------------------------------------------------------------------------------------------------------------------2.CORDIC算法与实现2.1 CORDIC算法原理CORDIC是一种迭代算法,它可以用来计算sin,cos等三角函数,计算幅值和相位等到所需的精度,CORDIC算法计算幅值和相位的原理如下:假设直角坐标系内有向量A(Xn,Yn),向量A顺时针旋转θn后得到向量B(Xn,Yn),如图2所示。
cordic算法求角度的verilog实现摘要:1.引言2.CORDIC 算法原理3.Verilog 实现4.测试与结果5.结论正文:1.引言CORDIC(Coordinate Rotation Digital Computer,坐标旋转数字计算法)算法是一种求解正切、余切、正弦、余弦等三角函数的算法。
该算法通过迭代坐标旋转的方式,实现角度的精确计算。
在FPGA 设计和数字信号处理领域,CORDIC 算法有着广泛的应用。
本文将介绍一种基于Verilog 的CORDIC 算法实现,以及如何用于求解角度。
2.CORDIC 算法原理CORDIC 算法的基本思想是利用简单的移位、加法和查表运算,迭代计算三角函数值。
以计算正切函数为例,假设输入角度为θ,初始化两个坐标轴(I 和Q)的值都为1,然后进行迭代计算:1)计算k*I + d*Q,其中k 为角度的整数部分,d 为角度的小数部分,I 为余弦值,Q 为正弦值。
2)更新I 和Q 的值:I = I * cos(d) - Q * sin(d),Q = I * sin(d) + Q *cos(d)。
3)判断是否达到精度要求,如果满足则输出结果,否则继续迭代。
3.Verilog 实现以下是一个基于Verilog 的CORDIC 算法求角度的实现:```verilogmodule cordic_algorithm(input wire clk,input wire reset,input wire angle_in,output reg angle_out);reg [31:0] I;reg [31:0] Q;reg [31:0] k;reg [31:0] d;always @(posedge clk or posedge reset) beginif (reset) beginI <= 1;Q <= 1;k <= 0;d <= 0;end else begin// 计算k*I + d*Q[31:0] temp_k = {angle_in[31:0], k[31]};[31:0] temp_d = {angle_in[31:0], d[31]};k <= temp_k;d <= temp_d;// 更新I 和Q 的值I <= I * cos(d) - Q * sin(d);Q <= I * sin(d) + Q * cos(d);// 判断是否达到精度要求if (abs(angle_in - (I + Q)) < 1) beginangle_out <= 32"b0;end else beginangle_out <= 32"b1;endendendendmodule```4.测试与结果为了验证CORDIC 算法的正确性,我们可以编写测试平台并在FPGA 上运行。

cordic反旋转迭代算法
CORDIC(Coordinate Rotation Digital Computer)反旋转迭代算法是一种用于计算旋转、平移和缩放的数学算法。
它可以用于计算三角函数、对数函数以及其他一些数学函数。
CORDIC算法的核心思想是通过迭代的方式将一个向量旋转到目标方向,同时伴随着一个缩放因子的变化。
具体步骤如下:
1. 初始化:给定一个初始向量(x, y)和一个目标旋转角度θ。
2. 迭代计算:重复以下步骤直到达到预设的精度或迭代次数:
- 对于每一次迭代,计算旋转角度d为θ的2^(-n)倍,其中n为迭代次数。
- 根据旋转角度d,计算cos(d)和sin(d)的近似值。
- 根据近似值和当前向量的x、y分量,计算旋转后的新向量(x', y')。
- 更新当前向量的x、y分量为新向量的x、y分量。
3. 输出结果:当达到预设的精度或迭代次数后,向量(x, y)即为旋转后的结果。
CORDIC算法的关键之处在于通过迭代的方式逼近旋转角度,并且利用三角函数的近似值进行计算,从而减少了计算量。
此外,CORDIC算法还可以通过反向迭代来实现反旋转操作。
总结起来,CORDIC反旋转迭代算法是一种通过迭代逼近旋转角度,并利用三角函数的近似值计算旋转后向量的算法。
它可以用于计算旋转、平移和缩放等数学运算。
cordic算法求角度的verilog实现-回复Cordic算法,全称为Coordinate Rotation Digital Computer算法,是一种用于计算三角函数以及其它相关函数的数值方法,它以固定点运算和迭代的方式实现高效的角度计算。
在本文中,我们将详细解释Cordic算法的原理,并给出一个Verilog的实现。
一、Cordic算法的原理Cordic算法是通过将一个向量旋转到目标角度来求角度的方法。
具体而言,Cordic算法使用一个旋转矩阵,通过一系列迭代将原始向量旋转到目标角度。
在每一次迭代中,算法会根据当前向量的角度与目标角度的差值,选择旋转矩阵中的一个旋转角度,将当前向量旋转一定的角度。
二、Cordic算法的基本流程Cordic算法的基本流程如下:1. 初始化:将初始向量以及目标角度设置为输入参数;2. 迭代计算:通过一系列的迭代,将原始向量旋转到目标角度;3. 输出结果:将最终的向量的角度作为输出结果。
三、Cordic算法的迭代计算在Cordic算法的迭代计算中,每一次迭代都会选择一个旋转角度,并将当前向量旋转到该角度。
为了提高计算效率,Cordic算法中使用了一种近似的旋转角度,称为Cordic常数。
四、Cordic常数的计算Cordic常数是在Cordic算法中用于近似旋转角度的固定常数。
Cordic常数的计算是一个关键的步骤,通常使用二进制表示法进行计算。
Cordic 常数可以根据所需的精度和性能来调整,一般越精确的结果会需要更多的迭代次数。
五、Cordic算法的Verilog实现下面是Cordic算法的Verilog实现的基本代码框架:verilogmodule cordic(input [N-1:0] x_in,input [N-1:0] y_in,input [M-1:0] angle_in,output [N-1:0] x_out,output [N-1:0] y_out);定义Cordic常数parameter M = 32; Cordic常数的位宽parameter [M-1:0] c = ; Cordic常数的值定义迭代次数parameter K = ; 迭代次数定义内部变量reg [N-1:0] x_internal;reg [N-1:0] y_internal;always *begin初始化内部变量x_internal = x_in;y_internal = y_in;迭代计算for (i = 0; i < K; i = i + 1)beginif (y_internal > 0)beginx_internal = x_internal + (y_internal >> i);y_internal = y_internal - (x_internal >> i);angle_in = angle_in - c[i];endelsebeginx_internal = x_internal - (y_internal >> i);y_internal = y_internal + (x_internal >> i);angle_in = angle_in + c[i];endendendassign x_out = x_internal;assign y_out = y_internal;endmodule六、Cordic算法的应用Cordic算法在计算机图形学、数字信号处理等领域有着广泛的应用。
cordic算法求角度的verilog实现Cordic算法是一种用于快速计算三角函数的算法,可以通过迭代的方式求解给定的角度值。
在Verilog语言中,我们可以实现Cordic算法来计算指定角度的正弦和余弦值。
本文将详细介绍如何使用Verilog实现Cordic算法来求解角度。
首先,我们需要了解Cordic算法的原理。
Cordic算法基于旋转的思想,通过一系列乘法和移位运算来逼近给定的角度值。
具体的算法可以分为三个步骤:旋转、缩放和校正。
首先,我们需要定义一些常量和变量来实现Cordic算法。
在Verilog中,我们可以使用参数和寄存器来实现。
下面是一个简单的Verilog代码段,用于定义Cordic算法的常量和变量:```verilog`define ANGLE_WIDTH 16 // 定义角度宽度`define ITERATIONS 16 // 定义迭代次数module cordic(input wire signed [`ANGLE_WIDTH-1:0] angle, // 输入角度output wire signed [2*`ANGLE_WIDTH-1:0] sin_value, // 输出正弦值output wire signed [2*`ANGLE_WIDTH-1:0] cos_value // 输出余弦值);reg signed [2*`ANGLE_WIDTH-1:0] x; // x坐标reg signed [2*`ANGLE_WIDTH-1:0] y; // y坐标reg signed [2*`ANGLE_WIDTH-1:0] z; // 角度// 在这里实现Cordic算法endmodule```在上述代码中,我们定义了输入角度、输出正弦值和余弦值的位宽。
同时,我们定义了x、y和z三个寄存器来保存计算过程中的坐标和角度。
接下来,我们需要实现Cordic算法的主要逻辑。
首先,我们需要初始化x、y和z的值。
CORDIC算法原理与实现引言概述在计算机科学和数学领域,CORDIC(Coordinate Rotation Digital Computer)算法是一种用于计算旋转和坐标转换的迭代算法。
由Jack E. Volder于1959年提出,CORDIC算法以其高效、简单的特性在数字信号处理、图形学和通信等领域得到了广泛应用。
本文将深入探讨CORDIC算法的原理和实现,揭示其在现代计算中的重要性。
正文内容1. CORDIC算法的基本原理1.1 旋转向量的基本概念CORDIC算法的核心思想是通过迭代旋转一个向量,使其逐步趋近于目标向量。
这里,向量旋转可以通过一系列坐标变换和旋转操作来完成。
在CORDIC中,旋转角度通常是一个固定的、预先设定的角度,如45度或30度。
1.2 坐标旋转的迭代过程CORDIC算法通过一系列迭代步骤,逐渐调整向量的坐标,使其最终趋近于目标向量。
每一步迭代都包括一个旋转和坐标调整操作,通过这种方式,算法能够在有限次迭代后收敛到所需的结果。
1.3 旋转因子的选择与优化CORDIC算法中,旋转因子的选择对算法的性能有着重要影响。
通过合理选择旋转因子,可以使得迭代过程更快速、更精确。
优化旋转因子的选择是CORDIC算法在不同应用中取得高性能的关键。
1.4 旋转模式与运算精度CORDIC算法支持不同的旋转模式,包括旋转、缩放和坐标转换等。
在应用中,需要根据具体问题选择合适的旋转模式。
此外,算法的运算精度也受到迭代次数的影响,需要权衡计算速度和精度。
1.5 硬件实现与软件实现CORDIC算法可以通过硬件电路实现,也可以通过软件编程实现。
硬件实现通常能够提供更高的运算速度,而软件实现更加灵活,适用于不同的计算平台。
选择合适的实现方式取决于具体应用的要求和硬件资源的可用性。
2. CORDIC算法的应用领域2.1 数字信号处理在数字信号处理领域,CORDIC算法常被用于计算旋转和相位调制等操作。
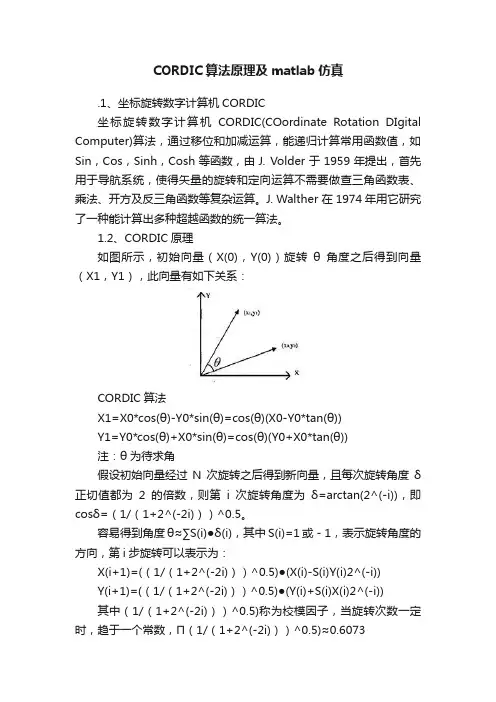
CORDIC算法原理及matlab仿真.1、坐标旋转数字计算机CORDIC坐标旋转数字计算机CORDIC(COordinate Rotation DIgital Computer)算法,通过移位和加减运算,能递归计算常用函数值,如Sin,Cos,Sinh,Cosh等函数,由J. Volder于1959年提出,首先用于导航系统,使得矢量的旋转和定向运算不需要做查三角函数表、乘法、开方及反三角函数等复杂运算。
J. Walther 在1974年用它研究了一种能计算出多种超越函数的统一算法。
1.2、CORDIC原理如图所示,初始向量(X(0),Y(0))旋转θ角度之后得到向量(X1,Y1),此向量有如下关系:CORDIC算法X1=X0*cos(θ)-Y0*sin(θ)=cos(θ)(X0-Y0*tan(θ))Y1=Y0*cos(θ)+X0*sin(θ)=cos(θ)(Y0+X0*tan(θ))注:θ为待求角假设初始向量经过N次旋转之后得到新向量,且每次旋转角度δ正切值都为2的倍数,则第i次旋转角度为δ=arctan(2^(-i)),即cosδ=(1/(1+2^(-2i)))^0.5。
容易得到角度θ≈∑S(i)●δ(i),其中S(i)=1或-1,表示旋转角度的方向,第i步旋转可以表示为:X(i+1)=((1/(1+2^(-2i)))^0.5)●(X(i)-S(i)Y(i)2^(-i))Y(i+1)=((1/(1+2^(-2i)))^0.5)●(Y(i)+S(i)X(i)2^(-i))其中(1/(1+2^(-2i)))^0.5)称为校模因子,当旋转次数一定时,趋于一个常数,Π(1/(1+2^(-2i)))^0.5)≈0.6073这样,算法每一步就可以简化为:X(i+1)=0.6073●(X(i)-S(i)Y(i)2^(-i))Y(i+1)=0.6073●(Y(i)+S(i)X(i)2^(-i))从而可以看出,对于移动的角度θ,现在只需要硬件加减法器和移位器就可以算出结果。
cordic算法求角度的verilog实现【原创实用版】目录1.引言2.CORDIC 算法的原理3.CORDIC 算法的 Verilog 实现4.仿真结果与分析5.结论正文1.引言CORDIC(Coordinate Rotation Digital Computer,坐标旋转数字计算机)算法是一种使用简单的移位、加法和查表运算来计算任意角度的算法。
该算法在数字信号处理、图像处理和通信系统等领域具有广泛的应用。
本文主要介绍了一种基于 Verilog 硬件描述语言实现 CORDIC 算法求角度的方法,并对其进行了仿真验证。
2.CORDIC 算法的原理CORDIC 算法的基本思想是将角度的计算分解为坐标轴旋转和查表两个步骤。
首先,根据给定的角度,计算出旋转方向和旋转次数。
然后,通过查表得到每次旋转所需的坐标轴偏移量。
接着,根据旋转次数和偏移量,依次进行坐标轴旋转。
最后,根据旋转后的坐标轴位置,得到所求角度。
3.CORDIC 算法的 Verilog 实现CORDIC 算法的 Verilog 实现主要包括模块的定义、输入输出端口声明、状态机的设计以及仿真测试等内容。
其中,模块的定义主要包括角度计算模块、坐标旋转模块和查表模块。
输入输出端口声明主要包括角度输入、旋转方向输入、旋转次数输出和角度输出等。
状态机的设计主要根据CORDIC 算法的原理,实现角度计算、坐标旋转和查表等功能。
仿真测试则用于验证 CORDIC 算法的正确性和性能。
4.仿真结果与分析通过对 CORDIC 算法的 Verilog 实现进行仿真测试,可以得到不同角度输入下的旋转次数输出和角度输出。
仿真结果表明,该实现能够正确计算出给定角度的旋转次数和角度值,具有较高的精度和稳定性。
此外,通过对比不同输入角度下的仿真结果,可以分析 CORDIC 算法的性能,如计算速度、资源占用等。
5.结论本文介绍了一种基于 Verilog 硬件描述语言实现 CORDIC 算法求角度的方法,并对其进行了仿真验证。
cordic算法求角度的verilog实现-回复Cordic算法是一种常用于计算三角函数和超越函数的高效算法。
它的高效性和精度使其成为数字信号处理、图像处理、通信系统等领域的重要工具。
在本篇文章中,我们将探讨Cordic算法在Verilog中的实现,并一步一步地解释其原理和实现细节。
首先,让我们来了解Cordic算法的基本原理。
Cordic算法的核心思想是将一个复杂的旋转操作分解为多个简单的旋转操作的叠加。
通过不断迭代这些简单的旋转操作,我们可以逐步逼近目标旋转角度。
Cordic算法最初是由Volder于1959年提出的,后来由Cordic团队在1968年对其进行改进和完善。
Cordic算法的关键是通过旋转向量和旋转角度的迭代叠加来求解旋转角度。
假设我们要求解的旋转角度为θ,我们可以将θ分解为多个简单角度的叠加,即θ=θ1+θ2+...+θn。
为了简化运算,Cordic算法将旋转角度限定在[-π/2,π/2]范围内,并使用四个象限旋转来处理不同的角度范围。
在Verilog中,我们可以使用固定点数表示来实现Cordic算法。
固定点表示使用固定位宽和小数位数来表示实数,可以提高计算的精度和效率。
下面是Cordic算法在Verilog中的实现步骤:1. 定义输入和输出:首先,我们需要定义输入和输出的信号。
输入信号是所要求解的旋转角度θ,输出信号是计算得到的旋转角度的固定点表示。
2. 初始化参数:接下来,我们需要初始化Cordic算法所需的参数。
这些参数包括旋转向量[x, y]和旋转角度的近似值。
初始时,旋转向量为[1, 0],旋转角度的近似值为0。
3. 迭代计算:通过不断迭代计算,我们可以逐步逼近目标旋转角度。
在每一次迭代中,我们使用以下步骤进行计算:a. 计算旋转向量的模长:利用乘法和加法操作,我们可以计算旋转向量的模长。
b. 更新旋转向量:将旋转向量按照当前迭代的旋转角度进行旋转操作。
c. 更新旋转角度的近似值:将当前迭代的旋转角度与上一次迭代的旋转角度相加,得到新的旋转角度的近似值。
FPGA基于CORDIC算法的求平方实现1. CORDIC功能及原理CORDIC是在没有专用乘法器(最小化门数量)情况下,一组完成特定功能的算法,包括平方、超越、Log、sin/cos/artan。
原理为连续的旋转一个较小的角度,以一定精度逼近想要的角度。
具体原理如下图所示:2. Xilinx实现CORDIC IP核及性能测试例1:无符号整数的平方操作:X_in[18:0],待平方的无符号整数,在nd(new data)为输入有效信号,输出x_out[9:0]及对应的使能信号rdy,其对应的波形图见下图。
(1)流水延迟最下方为输入数据,最上方为输出求平方结果。
从上图可以看到,从nd到rdy,间隔了5个时钟周期。
(2)时钟频率在FX130-1芯片上综合时钟频率结果为2.8ns,。
例2:无符号整数的平方根操作:在定制平方根IP核时,选取Unsigned FracTIon,将X_IN 与X_OUT设置为相同bit位,19bit。
以某项目为例,待平方数据需要19bit来表示。
在项目中,因为待开放的数据表示图像坐标,因此为整数,数据格式为UFIX19_0,即用19bit 表示数据,且小数位为零位。
而CORDIX的输入要求为UFIX19_18,即19bit数据,其中18bit表示小数位,1bit整数。
在数据格式与CORDIC核的输入不一致情况下,需要对输出结果的bit位进行正确解释。
输入x_in=180:000 0000 0000 1011 0100输出x_dout=6869:000 0001 1010 1101 0101解释:因为CORDIC期待的输入x_in为18bit小数,因此CORDIC的输出x_dout应为9bit 小数,即13+0.25+0.125+0.03125+0.0078125+0.001953125 = 13.416。
可以看出最小的精度可以保持到小数点第3位。
在具体实现时,可以根据精度要求进行调整。
cordic算法原理CORDIC算法原理。
CORDIC算法是一种用于计算三角函数、双曲函数和其他复杂函数的算法,它可以在不使用乘法器和除法器的情况下进行高效的计算。
CORDIC算法的全称是Coordinate Rotation Digital Computer,即坐标轮换数字计算机。
它最初是由Volder 在1959年提出的,用于计算超宽带信号处理中的正弦和余弦函数。
CORDIC算法在数字信号处理、通信系统、图像处理、雷达系统、全局定位系统(GPS)等领域得到了广泛的应用。
CORDIC算法的原理非常简单,它利用一系列的旋转和缩放操作来逼近目标函数的值。
通常情况下,CORDIC算法使用一个旋转因子K,通过不断地迭代旋转和缩放操作,最终得到目标函数的值。
CORDIC算法的核心思想是将复杂的函数计算问题转化为简单的旋转和缩放操作,从而实现高效的计算。
在CORDIC算法中,旋转和缩放操作是通过一系列的迭代步骤来实现的。
在每一步迭代中,输入数据会被旋转一个固定的角度,同时进行缩放操作,直到达到预先设定的精度要求。
通过不断地迭代旋转和缩放操作,最终得到目标函数的值。
CORDIC算法的迭代步骤非常简单,只需要进行加法、减法和移位操作,因此可以在不使用乘法器和除法器的情况下进行高效的计算。
在实际应用中,CORDIC算法通常用于计算三角函数和双曲函数。
以计算正弦函数为例,CORDIC算法可以通过一系列的旋转和缩放操作来逼近正弦函数的值。
首先,输入数据会被旋转一个固定的角度,然后进行缩放操作,不断地迭代直到达到预先设定的精度要求。
通过这种方式,可以高效地计算出正弦函数的值,而且不需要使用乘法器和除法器。
除了计算三角函数和双曲函数,CORDIC算法还可以用于解决其他复杂的函数计算问题。
例如,在数字信号处理中,CORDIC算法可以用于计算复数的幅度和相位,从而实现高效的信号处理。
在通信系统中,CORDIC算法可以用于计算信号的相位调制和解调制,提高系统的性能和效率。
COR算法反正切CORDIC算法的原理基于一个关键的观察:任何复数可以通过一个旋转变换转化为实部等于1的复数。
因此,对于给定的a+bi,我们可以的到一个旋转角度θ,使得旋转后的复数具有实部为1,虚部为0。
而这个旋转角度正好是所求的反正切的角度。
CORDIC算法通过多次迭代计算旋转角度的近似值,并将旋转后的复数的实部和虚部逐步逼近1和0,从而逼近反正切的角度。
具体来说,算法的步骤如下:1.初始化:假设要计算的角度为θ,初始值为0。
定义一个旋转因子K,初始值为1、定义一个系数d,初始值为12.迭代计算:通过多次迭代,逐步逼近旋转后的复数的实部和虚部。
-若θ大于0,则执行以下操作:- 将θ减去arctan(d/K)。
-将实部乘以K,将虚部除以K。
-将d乘以2-若θ小于0,则执行以下操作:- 将θ加上arctan(d/K)。
-将实部除以K,将虚部乘以K。
-将d乘以2-重复以上操作,直到θ趋近于0。
3.输出结果:经过多次迭代后,得到的旋转角度即为所求的反正切的角度。
CORDIC算法的优点是简单高效,只需要使用加法、减法、乘法和移位等基本运算即可实现。
它可以在硬件实现中得到高度优化,特别适合用于嵌入式系统和低功耗应用。
此外,CORDIC算法还具有可并行计算和迭代次数可控等优点,使得它成为一种广泛应用的反正切计算方法。
另外,CORDIC算法不仅可以用于计算反正切函数,还可以用于计算正弦、余弦、双曲正弦、双曲余弦等三角函数。
因此,它在许多数学和工程应用中具有广泛的用途。
综上所述,CORDIC算法是一种用于计算反正切函数的迭代算法。
它通过旋转坐标轴、逼近旋转后的复数的实部和虚部来逼近所求的角度。
该算法简单高效,并且可以在硬件实现中得到优化,特别适合用于嵌入式系统和低功耗应用。
此外,CORDIC算法还可以用于计算其他三角函数,具有广泛的应用前景。
基于CORDIC算法的反余弦运算一、概述反三角函数是在数学和工程学中非常重要的一类函数,其中反余弦函数是其中的一种。
在实际应用中,我们经常需要计算反余弦函数,其计算结果广泛用于信号处理、图形学、航空航天等领域。
在计算机科学中,为了高效地计算反余弦函数值,我们需要采用一种有效的算法来实现。
CORDIC算法就是其中之一。
二、CORDIC算法概述CORDIC算法(COordinate Rotation DIgital Computer)是一种用于计算旋转和超越函数的数值算法。
它最初由J.V. At本人ya于1956年提出,并由Jack E. Volder在1959年对其进行了改进和推广,成为了一种非常有效的算法。
CORDIC算法的核心思想是通过旋转矩阵将一个复杂的函数转化为简单的旋转运算,并且利用迭代的方式逐步逼近函数的值。
CORDIC算法具有硬件实现简单、运算可并行等优点,在数字信号处理、图形处理和通信系统中得到了广泛的应用。
三、CORDIC算法的原理1. 旋转因子的选取CORDIC算法使用一系列可以表示为二进制角度的旋转因子。
在反余弦运算中,我们需要使用反余弦函数的级数展开式,通过旋转因子来逼近反余弦函数的值。
2. 迭代计算CORDIC算法采用一个迭代的方式不断逼近反余弦函数的值。
在每一步迭代中,通过旋转步骤来逐步逼近目标值。
3. 硬件实现由于CORDIC算法中的旋转操作可以表示为移位和加减操作,因此可以很容易地在硬件上实现。
这使得CORDIC算法在嵌入式系统和数字信号处理器(DSP)中得到了广泛的应用。
四、CORDIC算法的反余弦运算实现1. 反余弦函数的级数展开式反余弦函数可以表示为一个无穷级数的形式:arccos(x) = π/2 - x - 1/2 x^3 - 3/8 x^5 - 5/16 x^7 - ...,其中|x| < 1。
2. CORDIC算法的迭代步骤在反余弦函数的计算中,我们可以采用CORDIC算法的迭代步骤来逼近反余弦函数的值。
cordic旋转迭代算法Cordic旋转迭代算法是一种常用于计算机数学运算的算法,它可以高效地计算三角函数和其他复杂的数学函数。
本文将介绍Cordic算法的原理、应用以及优缺点,并探讨其在现代计算机中的应用前景。
一、Cordic算法的原理Cordic算法全名为Coordinate Rotation Digital Computer,是由Jack E. Volder在1959年提出的一种迭代算法。
该算法通过旋转坐标系中的向量来近似计算三角函数和其他复杂的数学函数。
Cordic算法的原理是将一个向量通过一系列旋转操作,使其旋转到目标角度。
具体而言,Cordic算法通过不断迭代地将向量旋转到目标角度,并在每次迭代中调整向量的长度,直到达到所需的精度。
Cordic算法的优点是简单、高效。
它不依赖于查表或级数展开等复杂的数学运算,只需要一些简单的移位和加减操作即可实现。
因此,Cordic算法在资源有限的嵌入式系统中得到了广泛应用。
二、Cordic算法的应用Cordic算法最常见的应用之一是计算三角函数。
通过不断迭代调整向量的角度和长度,Cordic算法可以高效地计算正弦、余弦和反正切等三角函数的值。
这在信号处理、图像处理、通信系统等领域都有广泛的应用。
Cordic算法还可以用于计算其他复杂的数学函数,如指数函数、对数函数等。
通过将复杂的函数转化为三角函数的组合,再利用Cordic算法计算三角函数的值,可以高效地计算出这些复杂函数的近似值。
三、Cordic算法的优缺点Cordic算法的优点主要体现在以下几个方面:1. 简单高效:Cordic算法只需要简单的移位和加减操作,不依赖于复杂的数学运算,因此实现起来非常简单高效。
2. 精度可控:Cordic算法可以通过控制迭代次数来控制计算的精度,可以在计算精度和计算速度之间进行权衡。
3. 适用性广泛:Cordic算法可以用于计算各种数学函数,特别适用于嵌入式系统等资源有限的环境。