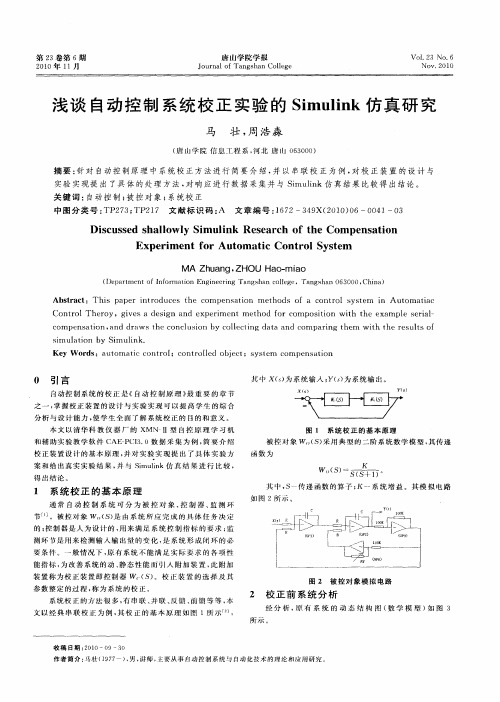
浅谈基于Simulink的自动控制系统性能的分析与仿真
- 格式:docx
- 大小:13.08 KB
- 文档页数:3

《自动控制原理》控制系统的simulink仿真实验一、实验目的1.初步了解Matlab中Simulink的使用方法,熟悉simulink模块的操作和信号线的连接。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,熟悉各种典型环节的响应曲线。
3.定性了解各参数变化对典型环节动态特性的影响。
二、实验仪器Matlab7.0 , 计算机三、实验原理Simulink是MATLAB中的一种可视化仿真工具。
Simulink是一个模块图环境,用于多域仿真以及基于模型的设计。
它支持系统设计、仿真、自动代码生成以及嵌入式系统的连续测试和验证。
四、实验内容及步骤1、建立仿真模型系统1.1 运行Matlab,在命令窗口“Command Window”下键入“Simulink”后回车,则打开相应的系统模型库;或者点击工具栏上的“Simulink”图标,进入系统仿真模型库,然后点击左上角“新文件”图标,打开模型编辑窗口。
1.2 调出模块在系统仿真模型库中,把要求的模块都放置在模型编辑窗口里面。
从信号源模块包(Sources)中拖出1个阶跃信号(step)和1个白噪声信号发生器(band-limited white noise);从数学运算模块包(Math Operations)中拖出1个比例环节(gain)和1个加法器(sum);从连续系统典型环节模块包(Continuous) 中拖出1个微分环(Derivative)和3个传函环节(transfer Fcn);从信号与系统模块包(Signals Routing) 拖出1个汇流排(mux);从输出模块包(Sinks)中拖出1个示波器(scope);所有模块都放置在模型编辑窗口里面。
1.3 模块参数设置(鼠标左键双击各典型环节,则可进行参数设置)双击打开白噪声信号发生器,设定功率(Noise power)为0.0001,采样时间(Sample time)为0.05。
打开比例环节,设定比例增益为2;打开3个传函环节(transfer Fcn),通过参数设定,分别构成积分、惯性和二阶环节。


Harbin Institute of Technologyb/;;/自动控制理论实验报告院系:电气工程及自动化学院班级:姓名:学号:实验名称:基于MATLAB/Simulink的控制系统分析同组人:实验时间:2015年11月11日哈尔滨工业大学实验五 线性系统的时域分析一、实验目的1、学会使用MATLAB 绘制控制系统的单位阶跃响应曲线;2、研究二阶控制系统中 、 对系统阶跃响应的影响3、掌握系统动态性能指标的获得方法及参数对系统动态性能的影响。
二、 实验设备Pc 机一台,MATLAB 软件。
三、实验内容1、已知二阶单位反馈闭环传递函数系统:求:(1)当 及 时系统单位阶跃响应的曲线。
① 时系统单位阶跃响应的曲线。
Time (seconds)A m p l i t u d e② 时系统单位阶跃响应的曲线。
Time (sec)A m p l i t u d eTime (sec)01020304050607080(2)从图中求出系统的动态指标: 超调量M p、上升时间t p及过渡过程调节时间t s。
,超调量=30.9%,上升时间=3,48s,=27.5s;,超调量=16.3%,=4.1s,=20.2s。
,=30.9%,=6.95s,=54.9s;,=30.9%,=2.33s,=18.3s。
(3)分析二阶系统中、的值变化对系统阶跃响应曲线的影响。
当不变,变大,系统的上升时间减小,最大超调量变小,调整时间减小。
当,变大,系统的上升时间减小,最大超调量不变,调整时间减小。
2、已知三阶系统单位反馈闭环传递函数为(1)求取系统闭环极点及其单位阶跃响应,读取动态性能指标。
(2)将原极点 S=-4 改成 S=-0.5,使闭环极点靠近虚轴,观察单位阶跃响应和动态性能指标的变化。
Time (sec)=7.26%,=1.03s,=3.64s;将原极点 S=-4 改成 S=-0.5(绿线)后, ,=4.12s,过渡过程调节时间=7.84s(3)改变系统闭环零点的位置将原零点 S=-2 改成 S=-1, 观察单位阶跃响应和动态性能指标的变化。

《系统仿真实验》实验报告目录一《电路》仿真实例 (3)2.1 简单电路问题 (3)2.1.1 Simulink中仿真 (3)2.1.2 Multisim中仿真 (4)2.2 三相电路相关问题 (5)二《自动控制原理》仿真实例 (7)1.1 Matlab绘图 (7)三《数字电路》仿真实例 (8)3.1 555定时器验证 (8)3.2 设计乘法器 (9)四实验总结 (11)一《电路》仿真实例2.1 简单电路问题课后题【2-11】如图所示电路,R0=R1=R3=4Ω,R2=2Ω,R4=R5=10Ω,直流电压源电压分别为10V、4V、6V,直流电流源电流大小为1A,求R5所在的支路的电流I。
(Page49)解:simulink和multisim都是功能很强大的仿真软件,下面就以这个简单的习题为例用这个两个软件分别仿真,进一步说明前者和后者的区别。
2.1.1 Simulink中仿真注意事项:由于simulink中并没有直接提供DC current source,只有AC current source,开始的时候我只是简单的把频率调到了0以为这就是直流电流源了,但是并没有得到正确的仿真结果。
后来问杨老师,在老师的帮助下发现AC current source的窗口Help中明确的说明了交流变直流的方法:A zero frequency and a 90 degree phase specify a DC current source.然后我把相角改成90度后终于得到了正确的仿真结果,Display显示I=0.125A,与课本上答案一致。
2.1.2 Multisim中仿真结果:I=125mA=0.125A(因为电流表探针电压电流比是1V/mA)。
2.2 三相电路相关问题【例】三相电路实际连接图如下所示,是通过功率表和电流的读数,验证课本上的相关结论。
解:Multisim中电路图连接如下所示:解:观察各支路的功率和功率因素,验证了以下几点结论:(1)只有纯阻性支路的功率因素为1;(2)纯感性或纯容性支路的功率因素为0,有功功率也为0;(3)混合支路的(容阻、感阻、容感阻)功率因素在0到1之间。
基于MatlabSimulink的控制系统设计与仿真控制系统设计与仿真是现代工程领域中至关重要的一部分,它涉及到对系统的建模、控制器设计以及性能评估等方面。
MatlabSimulink作为一款强大的工程仿真软件,在控制系统设计与仿真中扮演着重要的角色。
本文将介绍基于MatlabSimulink的控制系统设计与仿真的基本原理、方法和应用。
1. 控制系统设计基础在开始介绍基于MatlabSimulink的控制系统设计与仿真之前,我们首先需要了解控制系统设计的基础知识。
控制系统通常由被控对象、传感器、执行器和控制器等组成。
其中,被控对象是需要被调节或控制的物理系统,传感器用于采集被控对象的状态信息,执行器则根据控制器输出的信号对被控对象进行调节,而控制器则根据传感器采集的信息和设定的目标来生成控制信号。
2. MatlabSimulink简介MatlabSimulink是MathWorks公司推出的一款用于数学建模、仿真和算法开发的工具。
它提供了丰富的模块库和直观的图形化界面,使工程师能够快速地建立模型、进行仿真并进行实时分析。
在控制系统设计领域,MatlabSimulink可以帮助工程师快速搭建控制系统模型,并进行性能评估。
3. 控制系统建模与仿真在MatlabSimulink中,可以通过拖拽不同的模块来建立控制系统模型。
常见的模块包括传感器、执行器、PID控制器等。
通过连接这些模块,并设置相应的参数,可以构建一个完整的控制系统模型。
一旦建立好模型,就可以进行仿真分析了。
MatlabSimulink提供了丰富的仿真工具,可以对系统进行时域分析、频域分析等。
4. 控制器设计与调试在控制系统设计中,控制器设计是至关重要的一环。
MatlabSimulink提供了各种常见的控制器设计方法,如PID控制器、状态空间反馈等。
工程师可以根据系统需求选择合适的控制器,并通过仿真来验证其性能。
此外,在调试阶段,MatlabSimulink还提供了丰富的调试工具,如信号监视器、作用力显示等,帮助工程师快速发现问题并进行调整。
基于MATLABSimulink的控制系统设计与仿真控制系统设计是现代工程领域中至关重要的一部分,它涉及到对系统动态特性的分析、建模、控制器设计以及系统性能评估等方面。
MATLAB Simulink作为一款强大的工程仿真软件,在控制系统设计与仿真领域有着广泛的应用。
本文将介绍基于MATLAB Simulink的控制系统设计与仿真过程,包括系统建模、控制器设计、性能评估等内容。
1. 控制系统设计概述控制系统是通过对被控对象施加某种影响,使其按照既定要求或规律运行的系统。
在控制系统设计中,首先需要对被控对象进行建模,以便进行后续的分析和设计工作。
MATLAB Simulink提供了丰富的建模工具和仿真环境,可以帮助工程师快速准确地建立系统模型。
2. 系统建模在MATLAB Simulink中,可以利用各种不同的模块来构建系统模型,如传感器、执行器、控制器等。
通过简单拖拽这些模块并连接起来,就可以构建出完整的系统结构。
同时,Simulink还支持连续系统和离散系统的建模,可以方便地进行时域和频域分析。
3. 控制器设计控制器是控制系统中至关重要的一部分,它根据系统反馈信息对输出信号进行调节,以实现对被控对象的精确控制。
在MATLAB Simulink中,可以使用各种不同类型的控制器设计工具,如PID控制器、状态空间反馈控制器等。
通过这些工具,工程师可以快速设计出符合系统要求的控制器。
4. 性能评估在完成控制器设计后,需要对系统性能进行评估。
MATLAB Simulink提供了丰富的仿真功能,可以对系统进行动态响应、稳定性、鲁棒性等方面的评估。
通过仿真结果,工程师可以及时发现问题并进行调整优化。
5. 实例分析为了更好地说明基于MATLAB Simulink的控制系统设计与仿真过程,我们以一个温度控制系统为例进行分析。
首先建立被控对象的数学模型,然后设计PID控制器,并利用Simulink进行仿真验证。
最后根据仿真结果对系统性能进行评估,并进行必要的调整。
浅谈基于Simulink的自动控制系统性能的分析与仿真
摘要: 通过matlab/simulink建立某一随动系统的仿真模型,并分析该系统的性能。
首先用simulink建立的仿真模型求出系统的单位阶跃响应曲线,根据响应曲线判断系统的稳定性。
当系统的性能不能满足所要求的性能指标时,通过调整系统参数和增添校正装置来改善系统性能,并展示方便灵活的动态仿真结果。
结果说明,利用matlab/simulink分析自动控制系统简单、快捷、高效。
关键词:随动系统; simulink; 仿真模型; 性能分析
performance analysis and simulation of automatic control system based on simulink
wang li-fang1, zhou xiao-hua2, tao yan-lin3
(1.kunming university, kunming 650118, china; 2. guangxi university of technology, liuzhou 545006, china;
3. qujing normal university, qujing 655011, china)
abstract: a simulation model of a certain servo system is established with matlab / simulink, and the performances of the system are analyzed. the unit step response curve of the system is deduced with the simulation model established by simulink, and then the stability of the system is determinated according to its unit step response curve. when the performance of system can not meet the required performance indexes, the system performance can be improve by adjusting the system ﹑arameters and adding a compensator. it indicates the results of convenient and flexible dynamic simulation. the results show that the method to analyze automatic control system by the aid of matlab / simulink is simple, fast and efficient.
keywords: servo system; simulink; simulation model; performance analysis
收稿日期:2021-06-15
随着科学技术的开展,利用计算机对控制系统进行仿真和分析,是研究控制系统的重要方法。
自动控制系统主要利用matlab高级语言对其进行计算机分析【1】。
matlab是一套高性能的数值计算和可视化软件,它集数值分析、矩阵运算、信号处理和图形显示于一体,构成了一个方便的、界面友好的用户环境。
matlab软件的开发与应用,使得自动控制的研究方法发生了深刻的变化;功能强大的matlab软件使自动控制系统的仿真与设计变得简单、精确和灵活。
如今matlab已成为控制领域应用最广的计算机辅助工具软件【2】,它的出现给控制系统的分析提供了极大的方便。
simulink是matlab的重要组件之一,它提供了一个动态系统建模、仿真和综合分析的集成环境。
在环境中,无需书写大量的程序,只要通过简单直观的鼠标操作,就可以构造出复杂的仿真系统。
simulink的模块库为用户提供了多种多样的功能模块,这是一笔非常丰富的资源。
其中,根本功能模块有连续系统、离散系统、数学运算模块、输入源模块和接收模块等【5】。
1 运用matlab 软件进行系统分析
假设某一随动系统的开环传递函数为:
g(s)=120/
其系统结构框图如图1所示。
图1 随动系统框图
1.1 判断系统的稳定性
键入simulink命令后,翻开系统模型库,在新建模型窗口中直接参加所需要的模块,经模块连接后得该系统的仿真模型,如图2所示。
双击scope模块,即可得到如图3所示的单位阶跃响应曲线。
图2 simulink系统仿真模型
从图3所示随动系统的单位阶跃响应曲线波形可以看出,该系统为不稳定的发散状况。
1.2 改善系统性能
在此通过在系统的前向通路中串联校正装置改变系统结构,以到达改善系统性能的目的。
如图4所示,在固有系统的前向通路中串联比例调节器,其中kc =0.2,以降低系统的增益。
双击scope模块,即可得到比列(p)校正后的单位阶跃响应曲线,如图5所示。
图3 随动系统的单位阶跃响应曲线
图4 具有比列(p)校正的系统框图
从图5可以看出,系统成为稳定系统。
但系统的最大超调量仍然高达60%,系统的相对稳定性仍然不好。
假设再继续降低增益,又会影响系统的稳态精度。
为了使系统能到达稳、快、准,下面通过将p调节器改为pid调节器得以实现。
图5 p校正后的单位阶跃响应曲线
系统框图如图6所示,在固有系统的前向通路中串联pid校正装置,其校正传递函数为gc(s),pid校正后的单位阶跃响应曲线如图7所示。
图6 具有比例-积分-微分(pid)校正的系统框图
从图7所示pid校正后的单位阶跃响应曲线可以看出,在固有系统的前向通路中串联pid 调节器后,系统变为无静差系统,改善了系统的稳态性能。
调整时间变短了,系统的动态性能得到了改善。
比例-积分-微分(pid)校正兼顾了系统稳态性能和动态性能的改善。
图7 pid校正后的单位阶跃响应曲线
2 结语
matlab/simulink的功能和特点已使它成为控制系统设计、仿真中不可缺少的根本软件。
simulink仿真模型能够反映自动控制系统的动态工作过程,其可视化界面具有很好的演示效果,为自动控制系统的设计和研究提供了强有力的工具。
在此针对某一随动系统,利用matlab 设计了基于simulink的自动控制系统性能分析与仿真的方法,首先用simulink建立的仿真模型求出系统的单位阶跃响应曲线,再根据响应曲线判断系统的稳定性。
当系统的性能不能满足所要求的性能指标时,通过调整系统参数和增添校正装置来改善系统性能,展示了方便灵活的动态仿真结果。
结果说明,利用﹎atlab/猻imulink分析自动控制系统简单、快捷、高效。
参考文献
【1】何衍庆,姜捷,江艳君,等.控制系统分析设计和应用:matlab语言的应用.北京:化学工业出版社,2003.
【3】查晓春,黄爱华.自动控制原理课程的matlab 辅助教学.实验技术与管理,2007,24(12):91-93.
【4】邢国泉,但汉久.基于matlab 的控制系统分析.现代电子技术,2021,32(16):153-154.
【5】飞思科技产品研发中心.matlab 7 根底与提高.北京:电子工业出版社,2005.
【7】薛定宇,陈阳泉.基于matlab/simulink 的系统仿真技术与应用.北京:清华大学出版社,2002.
耿道霞,刘家彬.基于matlab 的simulink 仿真环境在控制系统设计中的应用.电脑知识与技术,2007(14):519-520.
王正林,王胜开,陈国顺.matlab/simulink与控制系统仿真.北京:电子工业出版社,2005.。