计数器—凸轮定位器_技术指南
- 格式:pdf
- 大小:630.98 KB
- 文档页数:13
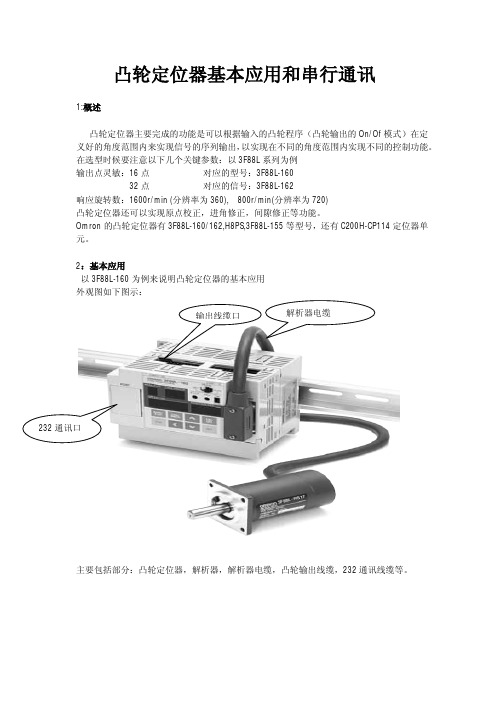
凸轮定位器基本应用和串行通讯1:概述凸轮定位器主要完成的功能是可以根据输入的凸轮程序(凸轮输出的On/Of 模式)在定义好的角度范围内来实现信号的序列输出,以实现在不同的角度范围内实现不同的控制功能。
在选型时候要注意以下几个关键参数:以3F88L 系列为例 输出点灵敏:16点 对应的型号:3F88L-160 32点 对应的信号:3F88L-162响应旋转数:1600r/min (分辨率为360), 800r/min(分辨率为720) 凸轮定位器还可以实现原点校正,进角修正,间隙修正等功能。
Omron 的凸轮定位器有3F88L-160/162,H8PS,3F88L-155等型号,还有C200H-CP114定位器单元。
2:基本应用以3F88L-160为例来说明凸轮定位器的基本应用 外观图如下图示:主要包括部分:凸轮定位器,解析器,解析器电缆,凸轮输出线缆,232通讯线缆等。
a)配线情况:电源端接线:控制端接线:输出线缆口配线端子:b)编写简单凸轮程序来实验效果:连接上Start信号后第一步:设置分辨率:A1=1,720°;A1=0,360°。
试验中设置A1=1,按键顺序如下此参数设置之后需要断电上电才会生效。
第二步:在一个BANK号里面可以设置32个CAM号,设置每一个CAM号的角度范围,设置方法如下图:(下图是设置的BANK2的CAM2范围0°~90°)。
试验中设置的是:BANK2的CAM1是180°~270°,CAM2是0°~90°第三步:选择BANK 号:实验中连接BANK2信号,BANK1,BANK3不接线,因此执行的BANK 号是BANK2。
第四步:旋转编码器,观察输出监控按键顺序如下图:在对应的范围内监控到了输出,对应的CAM 号如下图。
3:串行通讯来编写凸轮表和读取状态位采用串口调试工具来实现:使用CompoWay/F协议a):RS-232配线情况b:)使用电脑调试工具来实现与Cam Positioner通讯设置好通讯设置:凸轮定位器默认设置9600 7,2,E,其中波特率可以设置为9600或19200两种。


一、凸轮控制器的结构凸轮控制器是一种大型手动控制电器,是起重机上重要的电气操作设备之一,用以直接操作与控制电动机的正反转、调速、起动与停止。
应用凸轮控制器控制电动机控制电路简单,维修方便,广泛用于中小型起重机的平移机构和小型起重机提升机构的控制中。
图8-4为凸轮控制器的结构原理图。
凸轮控制器从外部看,由机械结构、电气结构、防护结构等三部分组成。
其中手轮、转轴、凸轮、杠杆、弹簧、定位棘轮为机械结构。
触头、接线柱和联板等为电气结构。
而上下盖板、外罩及灭弧罩等为防护结构。
当转轴在手轮扳动下转动时,固定在轴上的凸轮同轴一起转动,当凸轮的凸起部位顶住滚子时,便将动触点与静触点分开;当转轴带动凸轮转动到凸轮凹处与滚子相对时,动触点在弹簧作用下,使动静触点紧密接触,从而实现触点接通与断开的目的。
在方轴上可以叠装不同形状的凸轮块,以使一系列动触点按预先安排的顺序接通与断开。
将这些触点接到电动机电路中,便可实现控制电动机的目的。
(a)结构外形图 (b)动作原理示意图图8-4 凸轮控制器结构示意图二、凸轮控制器的型号与主要技术参数常用的国产凸轮控制器有KT10、KT12、KT14、KT16等系列,以及KTJ1-50/1、KTJ1-50/5、KTJ1-80/1等型号。
凸轮控制器的型号及意义为:凸轮控制器按重复短时工作制设计,其JC=25%。
KT14系列凸轮控制器的主要技术参数见表,其中KT14-25J/1、KT14-60J/1型可用于同时控制两台绕线转子三相异步电动机,并带有控制定子电路的触点;KT14-25J/3型可用于控制一台笼型三相异步电动机的正反转;KT14-60J/4型可用于同时控制两台绕线转子三相异步电动机,定子电路由接触器控制。
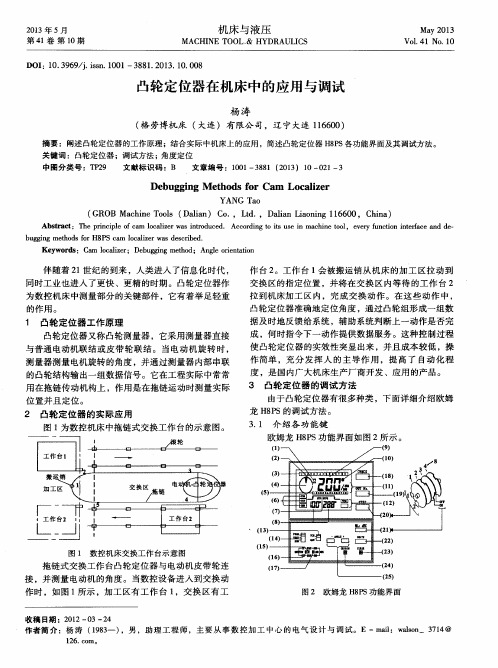
表8-1 KT14系列凸轮控制器的主要技术参数三、凸轮控制器控制的线路图8-5所示为采用凸轮控制器控制的10t桥式起重机小车控制电路。
凸轮控制器控制电路的特点是原理图以其圆柱表面的展开图来表示。
金风S48-750kW 偏航计数器调整手册1 准备工作 1.1所需工具2 操作步骤1. 将风力机手动切换至维护状态;2. 在登塔过程中,注意观察风力机扭揽情况。
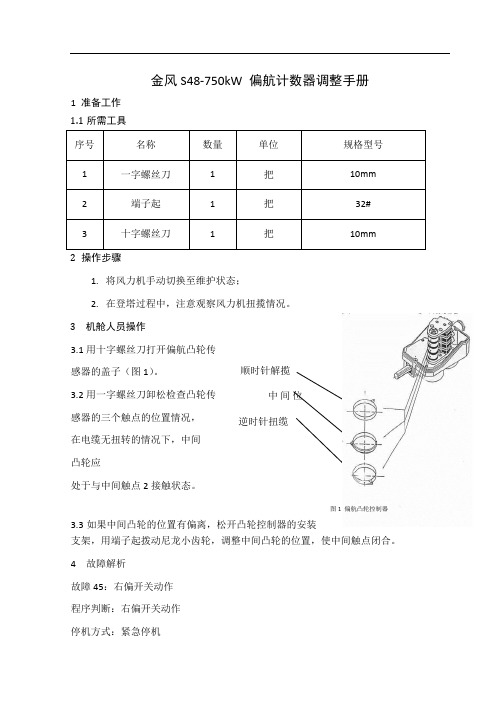
3 机舱人员操作3.1用十字螺丝刀打开偏航凸轮传 感器的盖子(图1)。
3.2用一字螺丝刀卸松检查凸轮传 感器的三个触点的位置情况, 在电缆无扭转的情况下,中间 凸轮应处于与中间触点2接触状态。
3.3如果中间凸轮的位置有偏离,松开凸轮控制器的安装支架,用端子起拨动尼龙小齿轮,调整中间凸轮的位置,使中间触点闭合。
4 故障解析故障45:右偏开关动作 程序判断:右偏开关动作 停机方式:紧急停机逆时针扭缆顺时针解揽中间位图1 偏航凸轮控制器自动复位:无法复位故障原因:偏航计数不准确或凸轮计数器调整错误。
故障46:左偏开关动作程序判断:左偏开关动作停机方式:紧急停机自动复位:无法复位故障原因:偏航计数不准确或凸轮计数器调整错误。
每次报此类故障时,基本判定机组因扭揽造成。
但由于凸轮计数器串联在安全链中,故在报“左、右偏开关动作”时,也会报出“安全链断”故障。
判断是否属于“左、右偏开关动作”故障时,在风力机监控机“故障堆栈”中查看“安全链断”前一故障是否报出“左、右偏开关动作”。
5故障原因5.1 偏航计数器有三个位置开关,分别表示顺偏位置、中间位置和逆偏位置。
它由小齿轮轮与偏航盘相啮合,在偏航动作的同时也会带动偏航计数器内部的齿轮转动,当转动一定圈后,会触动顺偏位置开关或逆偏位置开关。
计算机接收到信号后进行判断解缆,解缆后未触到开关时信号消失,当触动中偏位置开关时表示解缆结束。
5.2 解缆偏航过程在收到顺/逆时针偏航位置开关信号时执行,表示风机向一个方向偏航过多。
不论正在执行对风偏航还是侧风偏航,都停止执行偏航制动,执行逆/顺时针解缆偏航。
当收到中间位置开关信号时执行偏航制动,自动清除故障信息,返回自动偏航过程。
5.3 扭缆开关是电缆扭转的最后一级保护。