哈工大机械原理大作业——凸轮——22号
- 格式:doc
- 大小:211.00 KB
- 文档页数:7
Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:凸轮机构设计姓名:李清蔚学号:1140810304 班级:1408103指导教师:林琳一.设计题目设计直动从动件盘形凸轮机构,其原始参数见表1表一: 凸轮机构原始参数升程(mm )升程运动角(º) 升程运动规律升程许用压力角(º)回程运动角(º) 回程运动规律 回程许用压力角(º)远休止角 (º) 近休止角(º) 4090等加等减速30 50 4-5-6-7多项式60 100 120二.凸轮推杆运动规律(1)推程运动规律(等加速等减速运动)推程F0=90°①位移方程如下:②速度方程如下:③加速度方程如下:(2)回程运动规律(4-5-6-7多项式)回程00240190≤≤ϕ,F0=90°,F s=100°,F0’=50°其中回程过程的位移方程,速度方程,加速度方程如下:三.运动线图及凸轮s d ds -φ线图本题目采用Matlab 编程,写出凸轮每一段的运动方程,运用Matlab 模拟将凸轮的运动曲线以及凸轮形状表现出来。
代码见报告的结尾。
1、程序流程框图开始输入凸轮推程回程的运动方程输入凸轮基圆偏距等基本参数输出ds,dv,da 图像 输出压力角、曲率半径图像 输出凸轮的构件形状结束2、运动规律ds图像如下:速度规律dv图像如下:加速度da规律如下图:3.凸轮的基圆半径和偏距以ds/dfψ-s图为基础,可分别作出三条限制线(推程许用压力角的切界限D t d t,回程许用压力角的限制线D t'd t',起始点压力角许用线B0d''),以这三条线可确定最小基圆半径及所对应的偏距e,在其下方选择一合适点,即可满足压力角的限制条件。
得图如下:得最小基圆对应的坐标位置O点坐标大约为(13,-50)经计算取偏距e=13mm,r0=51.67mm.2.绘制理论轮廓线上的压力角曲线和曲率半径曲线针对凸轮转向及推杆偏置,令N1=1凸轮逆时针转;N2=1偏距为正。
机械原理大作业(二) 作业名称:机械原理设计题目:凸轮机构设计院系: 机电工程学院班级:设计者:学号:指导教师:丁刚陈明设计时间:哈尔滨工业大学机械设计1、设计题目如图所示直动从动件盘形凸轮机构,根据其原始参数设计该凸轮。
表一:凸轮机构原始参数序号升程(mm) 升程运动角(º)升程运动规律升程许用压力角(º)回程运动角(º)回程运动规律回程许用压力角(º)远休止角(º)近休止角(º)12 80 150正弦加速度30 100 正弦加速度60 60 502、凸轮推杆运动规律(1)推杆升程运动方程S=h[φ/Φ0-sin(2πφ/Φ0)]V=hω1/Φ0[1-cos(2πφ/Φ0)]a=2πhω12sin(2πφ/Φ0)/Φ02式中:h=150,Φ0=5π/6,0<=φ<=Φ0,ω1=1(为方便计算)(2)推杆回程运动方程S=h[1-T/Φ1+sin(2πT/Φ1)/2π]V= -hω1/Φ1[1-cos(2πT/Φ1)]a=-2πhω12sin(2πT/Φ1)/Φ12式中:h=150,Φ1=5π/9,7π/6<=φ<=31π/18,T=φ-7π/63、运动线图及凸轮线图运动线图:用Matlab编程所得源程序如下:t=0:pi/500:2*pi;w1=1;h=150;leng=length(t);for m=1:leng;if t(m)<=5*pi/6S(m) = h*(t(m)/(5*pi/6)-sin(2*pi*t(m)/(5*pi/6))/(2*pi));v(m)=h*w1*(1-cos(2*pi*t(m)/(5*pi/6)))/(5*pi/6);a(m)=2*h*w1*w1*sin(2*pi*t(m)/(5*pi/6))/((5*pi/6)*(5*pi/6));% 求退程位移,速度,加速度elseift(m)<=7*pi/6S(m)=h;v(m)=0;a(m)=0;% 求远休止位移,速度,加速度elseif t(m)<=31*pi/18T(m)=t(m)-21*pi/18;S(m)=h*(1-T(m)/(5*pi/9)+sin(2*pi*T(m)/(5*pi/9))/(2*pi));v(m)=-h/(5*pi/9)*(1-cos(2*pi*T(m)/(5*pi/9)));a(m)=-2*pi*h/(5*pi/9)^2*sin(2*pi*T(m)/(5*pi/9));%求回程位移,速度,加速度elseS(m)=0;v(m)=0;a(m)=0;% 求近休止位移,速度,加速度endend推杆位移图推杆速度图推杆加速度图4、确定凸轮基圆半径与偏距在凸轮机构得ds/dφ-s线图里再作斜直线Dt dt与升程得[ds/dφ-s(φ)]曲线相切并使与纵坐标夹角为升程许用压力角[α],则D t d t线得右下方为选择凸轮轴心得许用区。
Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:凸轮机构设计院系:能源科学与工程学院班级:1102301设计者:刘平成学号:1110200724指导教师:唐德威设计时间:2013年6月7日凸轮机构设计1.设计题目(1) 凸轮机构运动简图:(2)凸轮机构的原始参数表2-1.凸轮机构原始参数 序号 升程(mm )升程运动角 升程运动规律升程许用压力角20 110 120° 正弦加速度35°回程运动角回程运动规律 回程许用压力角 远休止角近休止角 90°正弦加速度 65°90°60°(二)凸轮运动方程及相关图像、程序凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图: ○1 凸轮推杆升程、回程方程 πϕπϕϕs)650(πϕ≤≤140)(2=ϕs 511()69πφπ≤≤pi))*5708)/(23.2289)/1.-(sin(2+57083.2289)/1.-(-140(1)(3ϕπϕϕ=s1116()99πφπ≤≤)2914(πϕπ≤≤ 0)(4=ϕs ○2速度方程/2.0944;/2.09440))cos(2-140(1)(1πϕϕ=v 16(2)9πφπ≤≤ 0)(2=ϕv 511()69πφπ≤≤ 708;5708))/1.53.2289)/1.-(cos(2-140(1)(3ϕπϕ=v 1116()99πφπ≤≤ 0)(4=ϕv 16(2)9πφπ≤≤○3加速度方程 .0944^2;/2.0944)/2sin(2280)(1πϕπϕ=a )650(πϕ≤≤0)(2=ϕa 511()69πφπ≤≤08^25708)/1.573.2289)/1.-(sin(2280)(3ϕππϕ=a 1116()99πφπ≤≤ 0)(4=ϕa 16(2)9πφπ≤≤推杆位移、速度、加速度线图matlab编程clear,clcpu=0*pi/180:0.0001:120*pi/180; %升程运动角范围pf=120*pi/180:0.0001:210*pi/180; %远休止角范围pd=210*pi/180:0.0001:300*pi/180; %回程运动角范围pn=300*pi/180:0.0001:2*pi; %近休止角范围h=110e-3; %升程w=10; %凸轮角速度p0=120*pi/180; %升程运动角p01=90*pi/180; %回程运动角ps=90*pi/180; %远休止角%----------推程-----------------------------------------su=h.*(pu./p0-sin(2.*pi.*pu./p0)/(2*pi)); %推杆位移vu=h*w/p0*(1-cos(2*pi*pu./p0)); %推程速度au=2*pi*h*w^2/p0^2*sin(2*pi*pu./p0); %推程加速度%------------远休止----------------------------nf=size(pf);sf=h*ones(nf); %推杆位移vf=zeros(nf); %推程速度af=zeros(nf); %推程加速度%---------------回程------------------------------T=pd-(p0+ps);sd=h/2*(1+cos(pi/p01*T)); %回程位移vd=-pi*h*w/(2*p01)*sin(pi/p01*T); %回程速度ad=-pi^2*h*w^2/(2*p01^2)*cos(pi/p01*T); %回程加速度%--------------------近休止---------------------------------nn=size(pn);sn=zeros(nn); %推杆位移vn=zeros(nn); %推程速度an=zeros(nn); % 推程加速度%------画出推杆位移、速度、加速度线图---------------p=[pu,pf,pd,pn];s=[su,sf,sd,sn];subplot(2,3,1),hold onplot(p,s*1e3,'linewidth',2),xlabel('\phi/rad'),ylabel('s/mm'),grid on,title('推杆位移'),axis([0,2*pi,1.1*min(s)*1e3,1.1*max(s)*1e3]) subplot(2,3,2) v=[vu,vf,vd,vn];plot(p,v,'linewidth',2),xlabel('\phi/rad'),ylabel('v/m/s'),grid on,title('推杆速度'),axis([0,2*pi,1.1*min(v),1.1*max(v)]) subplot(2,3,3) a=[au,af,ad,an];plot(p,a,'linewidth',2),xlabel('\phi/rad'),ylabel('a/m/s^2'),grid on,title('推杆加速度'),axis([0,2*pi,1.1*min(a),1.1*max(a)]) hold off(三)凸轮机构s d ds-ϕ图像及程序代码 %--------------------求ds/d_phi-------------------subplot(2,3,4),plot(v/w*1e3,s*1e3,'linewidth',2),xlabel('ds/d\phi/mm'),ylabel('s/mm'),axis equal,grid on,title('ds/d\phi —s')%---------------------凸轮轴心许用区域--------------------------- alpha_up=35*pi/180; %升程许用压力角 alpha_down=65*pi/180; %回程许用压力角 p1=pi/2-alpha_up; %推程斜率角 p2=alpha_down-pi/2; %回程斜率角 ku=tan(p1); %推程切线斜率 kd=tan(p2); %回程切线斜率 R2=[cos(-p2),-sin(-p2);sin(-p2),cos(-p2)];%推程旋转矩阵 R1=[cos(-p1),-sin(-p1);sin(-p1),cos(-p1)];%推程旋转矩阵 nu=size(pu); for i=1:nu(2)Temp=R1*[vu(i)/w;su(i)];vut(i)=Temp(1); %旋转推程ds/dp-s 曲线 sut(i)=Temp(2); endnd=size(pd); for i=1:nd(2)Temp=R2*[vd(i)/w;sd(i)];vdt(i)=Temp(1); %旋转回程ds/dp-s 曲线 sdt(i)=Temp(2); endfor j=1:nu(2)if sut(j)==min(sut)temu=j; %旋转推程ds/dp-s 曲线后求最低点 end endfor j=1:nd(2)if sdt(j)==min(sdt)temd=j; %旋转回程ds/dp-s曲线后求最低点endendt1=1.2*min(vd/w):0.01:1.2*max(vu/w); %切线定义域t2=min(vd/w)/6:0.01:1.2*max(vu/w);t3=0:0.01:1.2*max(vu/w);s1=ku*(t2-vu(temu)/w)+su(temu); %推程切线s2=kd*(t1-vd(temd)/w)+sd(temd); %回程切线s3=tan(-p1)*t3; %推程起点压力角限制线subplot(2,3,5) %画图hold on,axis equal,grid onplot(v/w*1e3,s*1e3,'linewidth',2)plot(t2*1e3,s1*1e3,'linewidth',1,'color','r')plot(t1*1e3,s2*1e3,'linewidth',1,'color','r')plot(t3*1e3,s3*1e3,'linewidth',1,'color','r')xlabel('ds/d\phi/mm'),ylabel('s/mm'),hold off,title('ds/d\phi—s,轴向许用范围')(四)确定凸轮的基圆半径和偏距、绘制凸轮机圆、偏距圆、理论轮廓曲线---------------画理论廓线图-------------------------e=36e-3;s0=52e-3;r0=sqrt(s0^2+e^2);x=(s0+s).*cos(p)-e.*sin(p);y=(s0+s).*sin(p)+e.*cos(p);x1=r0*cos(p);y1=r0*sin(p);subplot(2,3,6)plot(x*1e3,y*1e3,'linewidth',1),axis equal,grid on,hold on,title('廓线图')plot(x1*1e3,y1*1e3,'linewidth',1,'color','r')%-------------求最小曲率半径-----------------------nx=size(x);nx1=nx(2)-2;dydp=diff(y)./diff(p);%求微分dxdp=diff(x)./diff(p);d2ydp2=diff(dydp)./diff(p(1:nx1+1));d2xdp2=diff(dxdp)./diff(p(1:nx1+1));rho=(dxdp(1:nx1).^2+dydp(1:nx1).^2).^1.5./abs((dxdp(1:nx1).*d2ydp2(1:nx1)-dydp(1:nx1).*d2x dp2(1:nx1)));%理论廓线曲率半径rhomin=min(rho);%最小曲率半径rr=rhomin-3e-3;%----------------实际廓线图----------------X=x(1:nx(2)-1)-rr*dydp./(dxdp.^2+dydp.^2).^0.5;%求实际廓线坐标Y=y(1:nx(2)-1)+rr*dxdp./(dxdp.^2+dydp.^2).^0.5;plot(X*1e3,Y*1e3,'linewidth',2,'color','k')%画实际廓线图Legend('理论廓线','基圆','实际廓线'),axis([1.1*min(x)*1e3,1.1*max(x)*1e3,1.1*min(y)*1e3,1.1*max(y)*1e3])得到基圆半径311mm、偏距36mm。
H a r b i n I n s t i t u t e o f T e c h n o l o g y大作业设计说明书课程名称:机械原理设计题目:凸轮机构院系:机电学院班级:姓名:学号:指导教师:丁刚设计时间:2014.5.29哈尔滨工业大学1.设计题目第31题:升程/mm 升程运动角/。
升程运动规律升程许用压力角/。
回程运动角/。
回程运动规律回程许用压力角/。
远休止角/。
近休止角/。
150 90 等加等减速40 80 余弦加速度70 40 1502.运动方程式及运动线图由题目要求凸轮逆时针旋转(1)确定凸轮机构推杆升程、回程运动方程,并绘制推杆位移、速度、加速度线图。
升程第一段:(0 <φ< pi /4)φ0=pi/2;s1 = 73*φ^2;v1=146*w*φ;a1 = 146*w^2;升程第二段:(pi/4 <φ< pi /2)s2 =90-73*(pi/2-φ)^2;v2=146*w*( pi/2-φ);a2 =-146*w.^2;远休止程:(pi/2 <φ< 10*pi/9)s3 = 90;v3 = 0;a3 = 0;回程:(10*pi/9)< φ< ( 14*pi/9)s4 =45*(1+cos(9/4*(φ-10*pi/9)));v4 =-101.25*w*sin(9/4*(φ-10*pi/9)) ;a4 =-227.8*w^2* cos(9/4*(φ-10*pi/9)); 近休止程:(14*pi/9)< φ < ( 2*pi);s5 =0;v5 =0;a5 =0;1.由上述公式通过编程得到位移、速度、加速度曲线如下:(编程见附录).基圆半径为r0 = (50^2+100^2)0.5=112mm,偏距e = 50mm。
3.凸轮实际轮廓,理论轮廓,基圆,偏距圆绘制4.整体图像附录1.求位移、速度、加速度的程序(matlab)w = input('请输入W=');x = 0:(pi/1000):(pi/4);s1 = 73*x.^2;v1=146*w*x;a1 = 146*w.^2;y = (pi/4):(pi/1000):(pi/2);s2 =90-73*(pi/2-y).^2;v2=146*w*( pi/2-y);a2 =-146*w.^2;z = (pi/2 ):(pi/1000):(10*pi/9);s3 = 90;v3 = 0;a3 = 0;c = (10*pi/9):(pi/1000):( 14*pi/9);s4 =45*(1+cos(9/4*(c-10*pi/9)));v4 =-101.25*w*sin(9/4*( c-10*pi/9)) ;a4 =-227.8*w.^2* cos(9/4*(c-10*pi/9));d=(14*pi/9):(pi/1000):( 2*pi);s5 =0; v5 =0; a5 =0;subplot (2,2,1)plot(x,s1,'b',y,s2,'b',z,s3,'b',c,s4,'b', d,s5,'b');xlabel('转角/rad')ylabel('位移/(mm/s)')title('位移与转角曲线')grid onsubplot (2,2,2)plot(x,v1,'g',y,v2,'g',z,v3,'g ',c,v4,'g', d,v5,'g')ds4 =45*9/4*sin(9/4*(c-10*pi/9));d=(14*pi/9):(pi/1000):( 2*pi);s5 =0;ds5 =0;plot(ds1,s1,'b',ds2,s2,'b',ds3,s3,'b',ds4,s4,'b',ds5,s5,'b'); xlabel('ds/dp');ylabel('(位移s/mm)')title('ds/dp 与位移s曲线')grid onhold onx3=-150:0.001:0;y3 = 0.577*x3;plot (x3,y3,'r');hold onx1=-150:0.001:150;for i=1:1:250;k1=(s1(i+1)-s1(i))/ (ds1(i+1)-ds1(i));if(k1>=-1.733 && k1<=-1.731)y1=k1*(x1-ds1(i))+s1(i);plot (x1,y1,'r');end3.确定滚子半径(1)先求凸轮理论轮廓曲线,程序如下:Clc;clear;w = input('请输入w=');s0 = 100;s = 90;e = 50; x = 0:(pi/100):(pi/4);x1 = (s + s0)*cos(x)-e*sin(x);y1 = (s0 + s)*sin(x) - e*cos(x);y = (pi/4):(pi/100):(pi/2);x2 = (s + s0)*cos(y)-e*sin(y);y2 = (s0 + s)*sin(y) - e*cos(y);z = (pi/2 ):(pi/100):(10*pi/9);x3 = (s + s0)*cos(z)-e*sin(z);y3 = (s0 + s)*sin(z) - e*cos(z);c = (10*pi/9):(pi/1000):( 14*pi/9);x4 = (s + s0)*cos(c)-e*sin(c);y4 = (s0 + s)*sin(c) - e*cos(c);d=(14*pi/9):(pi/1000):( 2*pi);x5 = (s + s0)*cos(d)-e*sin(d);y5 = (s0 + s)*sin(d) - e*cos(d);plot(x1,y1,'b',x2,y2,'b',x3,y3,'b',x4,y4,'b',x5,y5,'b');xlabel('x/mm')ylabel('y/mm')title('理论轮廓曲线')grid on(2)理论轮廓线最小曲率半径编程代码:由下程序结果可知pmin =81.6667这里滚子半径为 r r < pmin-ΔΔ=3~5mm;取r r=10mm;clear;clc;v=[];syms x1 x2 x3 x4 x5s0 = 100;e = 50;s1 = 73*x1.^2;t1 = (s1 + s0)*cos(x1)-e*sin(x1);y1 = (s0 + s1)*sin(x1) - e*cos(x1);tx1=diff(t1,x1);txx1=diff(t1,x1,2);yx1=diff(y1,x1);yxx1=diff(y1,x1,2);for xx1= 0:(pi/100):(pi/4);k1=subs(abs((tx1*yxx1-txx1*yx1)/(tx1^2+yx1^2)^1.5),{x1},{xx1}); v=[v,1/k1];ends2 =90-73*(pi/2-x2).^2;t2 = (s2 + s0)*cos(x2)-e*sin(x2);y2 = (s0 + s2)*sin(x2) - e*cos(x2);tx2=diff(t2,x2);txx2=diff(t2,x2,2);yx2=diff(y2,x2);yxx2=diff(y2,x2,2);for xx2=(pi/4):(pi/100):(pi/2);k2=subs(abs((tx2*yxx2-txx2*yx2)/(tx2^2+yx2^2)^1.5),{x2},{xx2});k4=subs(abs((tx4*yxx4-txx4*yx4)/(tx4^2+yx4^2)^1.5),{x4},{xx4}); v=[v,1/k4];ends5 =0;t5 = (s5 + s0)*cos(x5)-e*sin(x5);y5 = (s0 + s5)*sin(x5) - e*cos(x5);tx5=diff(t5,x5);txx5=diff(t5,x5,2);yx5=diff(y5,x5);yxx5=diff(y5,x5,2);for xx5=(10*pi/9):(pi/100):( 4*pi/3);k5=subs(abs((tx5*yxx5-txx5*yx5)/(tx5^2+yx5^2)^1.5),{x5},{xx5}); v=[v,1/k5];endpmin=min(v)4.绘制凸轮轮廓曲线clear ;clc;syms x y z c dw= input('请输入w=');n3 = diff(x3);m3 = diff(y3);xt3= subs(x3 + (r*m3)./sqrt(m3.^2+n3.^2),z,zz);yt3 = subs(y3 - (r*n3)./sqrt(m3.^2+n3.^2),z,zz);cc= (10*pi/9):(pi/1000):( 14*pi/9);s4 =45*(1+cos(9/4*(c-10*pi/9)));x4 = (s4 + s0).*cos(c)-e*sin(c);y4 = (s0 +s4).*sin(c) - e*cos(c);n4 = diff(x4);m4 = diff(y4);xt4= subs(x4 + (r*m4)./sqrt(m4.^2+n4.^2),c,cc);yt4 =subs( y4 - (r*n4)./sqrt(m4.^2+n4.^2),c,cc);dd=(14*pi/9):(pi/1000):( 2*pi);s5 =0;x5 = (s5 + s0).*cos(d)-e*sin(d);y5 = (s0 +s5).*sin(d) - e*cos(d);n5 = diff(x5);m5 = diff(y5);xt5= subs(x5 + (r*m5)./sqrt(m5.^2+n5.^2),d,dd);yt5 =subs( y5 - (r*n5)./sqrt(m5.^2+n5.^2),d,dd);plot(xt1,yt1,'b',xt2,yt2,'b',xt3,yt3,'b',xt4,yt4,'b',xt5,yt5,'b')for i=1:3601if yy(1,i)<=y0/2s(1,i)=2*h*(yy(i)./y0).^2;v(1,i)=4*h*w*yy(i)./(y0.^2);a(1,i)=4*h*w.^2./(y0.^2);elseif yy(1,i)>y0/2 && yy(1,i)<y0s(1,i)=h-2*h./y0.^2.*(y0-yy(i)).^2;v(1,i)=4*h*w*(y0-yy(i))./(y0.^2);a(1,i)=-4*h*w.^2./(y0.^2);elseif yy(1,i)>=y0 && yy(1,i)<y0+yss(1,i)=h;v(1,i)=0;a(1,i)=0;elseif yy(1,i)>=y0+ys && yy(1,i)<y0+ys+y01s(1,i)=h/2*(1+cos(pi/y01*(yy(1,i)-y0-ys)));v(1,i)=-pi*h*w/2/y01*sin(pi/y01*(yy(1,i)-y0-ys));a(1,i)=-pi^2*h*w^2/2/y01^2*cos(pi/y01*(yy(1,i)-y0-ys)); elseif yy(1,i)>=y0+ys+y01 && yy(1,i)<=360s(1,i)=0;v(1,i)=0;a(1,i)=0;subplot(2,3,5) ;plot(x,y,'r',xt,yt,eex,eey,'g',r0x,r0y,'k')%画图title('实际理论轮廓线')axis equal%使坐标轴比例相等grid on%画网格线。
哈工大机械原理大作业-凸轮机构设计(第题)————————————————————————————————作者:————————————————————————————————日期:机械原理大作业二课程名称:机械原理设计题目:凸轮机构设计院系:机电学院班级:1208103完成者:xxxxxxx学号:11208103xx指导教师:林琳设计时间:2014.5.2哈尔滨工业大学凸轮机构设计一、设计题目如图所示直动从动件盘形凸轮机构,其原始参数见表,据此设计该凸轮机构。
序号 升程(mm ) 升程运动角(°) 升程运动规律 升程许用压力角(°) 回程运动角(°) 回程运动规律 回程许用压力角(°)远休止角(°) 近休止角(°)3 50 150 正弦加速度 30 100 余弦加速度60 30 80二、凸轮推杆升程、回程运动方程及其线图1 、凸轮推杆升程运动方程(650πϕ≤≤) 升程采用正弦加速度运动规律,故将已知条件mm h 50=,650π=Φ带入正弦加速度运动规律的升程段方程式中得:⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-=512sin 215650ϕππϕS ; ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-=512cos 1601ππωv ; ω⎪⎭⎫ ⎝⎛=512sin 14421ϕπωa ; 2、凸轮推杆推程远休止角运动方程(πϕπ≤≤65) mm h s 50==;0==a v ;3、凸轮推杆回程运动方程(914πϕπ≤≤) 回程采用余弦加速度运动规律,故将已知条件mm h 50=,95'0π=Φ,6s π=Φ带入余弦加速度运动规律的回程段方程式中得:⎥⎦⎤⎢⎣⎡-+=)(59cos 125πϕs ; ()πϕω--=59sin451v ; ()πϕω-=59cos 81-a 21;4、凸轮推杆回程近休止角运动方程(πϕπ2914≤≤) 0===a v s ;5、凸轮推杆位移、速度、加速度线图根据以上所列的运动方程,利用matlab 绘制出位移、速度、加速度线图。
哈工大机械原理大作业-凸轮机构设计(第3题)(共15页)-本页仅作为预览文档封面,使用时请删除本页-机械原理大作业二课程名称:机械原理设计题目:凸轮设计院系:机电学院班级: 1208103完成者: xxxxxxx学号: xx指导教师:林琳设计时间:工业大学凸轮设计一、设计题目如图所示直动从动件盘形凸轮,其原始参数见表,据此设计该凸轮。
二、凸轮推杆升程、回程运动方程及其线图1 、凸轮推杆升程运动方程(650πϕ≤≤) 升程采用正弦加速度运动规律,故将已知条件mm h 50=,650π=Φ带入正弦加速度运动规律的升程段方程式中得:⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-=512sin 215650ϕππϕS ;⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-=512cos 1601ππωv ; ⎪⎭⎫ ⎝⎛=512sin 14421ϕπωa ; 2、凸轮推杆推程远休止角运动方程(πϕπ≤≤65) mm h s 50==; 0==a v ;3、凸轮推杆回程运动方程(914πϕπ≤≤)回程采用余弦加速度运动规律,故将已知条件mm h 50=,95'0π=Φ,6s π=Φ带入余弦加速度运动规律的回程段方程式中得:⎥⎦⎤⎢⎣⎡-+=)(59cos 125πϕs ;()πϕω--=59sin451v ; ()πϕω-=59cos 81-a 21;4、凸轮推杆回程近休止角运动方程(πϕπ2914≤≤) 0===a v s ;5、凸轮推杆位移、速度、加速度线图根据以上所列的运动方程,利用matlab 绘制出位移、速度、加速度线图。
①位移线图 编程如下: %用t 代替转角 t=0::5*pi/6;s=50*((6*t)/(5*pi)-1/(2*pi)*sin(12*t/5)); hold on plot(t,s); t=5*pi/6::pi; s=50; hold on plot(t,s); t=pi::14*pi/9;s=25*(1+cos(9*(t-pi)/5));hold onplot(t,s);t=14*pi/9::2*pi;s=0;hold onplot(t,s),xlabel('φ/rad'),ylabel('s/mm'); grid onhold off所得图像为:②速度线图编程如下:%用t代替转角,设凸轮转动角速度为1t=0::5*pi/6;v=60/pi*(1-cos((12*t)/5));hold onplot(t,v);t=5*pi/6::pi;v=0;hold onplot(t,v);t=pi::14*pi/9;v=-45*sin(9*(t-pi)/5);hold onplot(t,v);t=14*pi/9::2*pi;v=0;hold onplot(t,v),xlabel('φ(rad)'),ylabel('v(mm/s)'); grid onhold off所得图像为:③加速度线图利用matlab编程如下:%用t代替转角,设凸轮转动角速度为1t=0::5*pi/6;a=144/pi*sin(12*t/5);hold onplot(t,a);t=5*pi/6::pi;a=0;hold onplot(t,a);t=pi::14*pi/9;a=-81*cos(9*(t-pi)/5);hold onplot(t,a);t=14*pi/9::2*pi; a=0; hold onplot(t,a),xlabel('φ(rad)'),ylabel('a(mm/s^2)'); grid on hold off所得图形:三、绘制s d ds -ϕ线图根据运动方程求得:()⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧≤≤≤≤-≤≤≤≤--=πϕππϕππϕπϕππϕπππϕ2914.0914,59sin 4565,0650),512cos 6060(d ds 利用matlab 编程:%用t 代替φ,a 代替ds/d φ, t=0::5*pi/6;a=-(60/pi-60/pi*cos(12*t/5));s=50*((6*t)/(5*pi)-1/(2*pi)*sin(12*t/5)); hold on plot(a,s); t=5*pi/6::pi; a=0; s=50; hold on plot(a,s); t=pi::14*pi/9;a=45*sin(9*(t-pi)/5); s=25*(1+cos(9*(t-pi)/5)); hold on plot(a,s);t=14*pi/9::2*pi; a=0; s=0; hold onplot(a,s),title('ds/d φ-s'),xlabel('ds/d φ(mm/rad)'),ylabel('s(mm)'); grid on hold off 得s d ds-ϕ图:凸轮压力角的正切值s s e d ds +-=0/tan ϕα,左侧为升程,作与s 轴夹6π角等于升程许用压力角的切界线t t d D ,则在直线上或其左下方取凸轮轴心时,可使[]αα≤,同理右侧回程,作与s 轴夹角等于回程许用压力角3π的切界线''t t d D ,则在直线上或其右下方取凸轮轴心时,可使[]αα≤。
Harbin Institute of Technology大作业设计说明书课程名称:机械原理设计题目:凸轮机构设计院系:机电工程学院班级:设计者:学号:指导教师:设计时间:2014年6月6日哈尔滨工业大学一、 设计题目(1) 凸轮机构运动简图:二、凸轮推杆升程、回程运动方程及推杆位移,速度,加速度线图(1)推杆升程,回程运动方程如下:A.推杆升程方程:02φϕ≤≤时: 202s h ϕφ⎛⎫= ⎪⎝⎭124h v ωϕφ=2124h a ωφ=02φϕφ≤≤时:()2202hs h φϕφ=--()10204h v ωφϕφ=-21204h a ωφ=-式中 0150,2h πφ==,1ω=1rad/sB.推杆回程方程:'000s s φφϕφφφ+≤≤++()0'01cos 2s h s πϕφφφ⎧⎫=+-+⎡⎤⎨⎬⎣⎦⎭⎩ ()10''00sin 2s h v πωπϕφφφφ=--+⎡⎤⎣⎦ ()2210'2'00cos 2s h a πωπϕφφφφ=--+⎡⎤⎣⎦ 式中:'00150,9080,40s h φφφ====,(2)推杆位移,速度,加速度线图如下(凸轮转角从零到2π变化):三、凸轮机构的-s 线图,并依次确定凸轮的基圆半径和偏距1)凸轮机构的-s 线图:2)确定凸轮的基圆半径和偏距:在两切线交点右下方为凸轮轴心的许用区域。
将轴心设在点(88,-49.03)处。
于是有偏距e=88mm, S0=49.03,基圆半径=100.72mm。
四、滚子半径的确定及凸轮理论轮廓和实际轮廓的绘制.1)确定凸轮半径可取凸轮半径r=11mm 2)确定凸轮理论廓线及实际轮廓五、计算编程h=150;%推杆上升的最大行程hw1=1;q=90*pi/180;%这里规定推程运动角为90度qs=40*pi/180;%远休止角为40度q1=80*pi/180;%回程运动角为80度for i=1:45%将45度按1度均分,从而得到各个度数上的轮廓坐标qq(i)=i*pi/180;s(i)=2*h*(qq(i)/q)^2;v(i)=4*h*w1*qq(i)/q^2;a(i)=4*h*w1^2/q^2;t(i)=4*h*(qq(i)/q^2);endfor i=45:90qq(i)=i*pi/180;s(i)=h-2*h/q^2*(q-qq(i))^2;v(i)=4*h*w1/q^2*(q-qq(i));a(i)=-4*h*w1^2/q^2;t(i)=4*h/q^2*q-4*h/q^2*qq(i);endfor i=90:130qq(i)=i*pi/180;s(i)=h;v(i)=0;a(i)=0;t(i)=0;endfor i=130:210qq(i)=i*pi/180;s(i)=h/2+h*cos((pi/q1)*(qq(i)-(q+qs)))/2;v(i)=-pi*h*w1*sin((pi/q1)*(qq(i)-(q+qs)))/(2*q1);a(i)=-pi*pi*h*w1*w1*cos((pi/q1)*(qq(i)-(q+qs)))/(2*q1*q1);t(i)=h*cos(pi/q1)/2;endfor i=210:360qq(i)=i*pi/180;s(i)=0;v(i)=0;a(i)=0;t(i)=0;end%推杆运动规律曲线绘制plot(qq,s)plot(qq,v)plot(qq,a)plot(t,s)% 绘制ds/dqq---曲线图hold on;f=@(x)x*(tan(50*pi/180))-154;x=0:195;y=f(x);plot(x,y)hold on;f=@(x)x*(tan(160*pi/180))-17;x=-70:130;y=f(x);plot(x,y)%计算曲率半径sym s,t,i;d=diff(t,s);dd=diff(t,s);R=abs((1+d^2)^(3/2)/dd);%绘制凸轮轮廓线r0=100.72;e=88;S0=49.03;Rr=11;x(i)=(S0-s(i))*cos(qq(i))-e*sin(qq(i));y(i)=(S0+s(i))*sin(qq(i))+e*cos(qq(i));d1(i)=-(S0-s(i))*sin(qq(i))-e*cos(qq(i)); d2(i)= (S0+s(i))*cos(qq(i))-e*sin(qq(i)); X=x-Rr*d1(i)/((d1(i))^2+(d2(i))^2)^(1/2); Y=y+Rr*d2(i)/((d1(i))^2+(d2(i))^2)^(1/2); plot(X,Y,x,y)。
机械原理大作业凸轮
机械原理大作业,凸轮。
凸轮是机械传动中常用的一种机构,它通过不规则形状的轮廓
来实现对运动部件的控制。
在机械原理中,凸轮通常被用于将旋转
运动转化为直线运动,或者实现复杂的运动轨迹控制。
本文将对凸
轮的结构、工作原理以及应用进行介绍。
首先,凸轮的结构可以分为凸轮轴、凸轮轮廓和凸轮座三个部分。
凸轮轴是凸轮的主体,它通常由钢材或铸铁制成,具有一定的
硬度和强度。
凸轮轮廓是凸轮的关键部分,它的形状决定了凸轮的
运动规律。
凸轮座则是凸轮的支撑部分,用于将凸轮固定在机器上。
这三个部分共同构成了凸轮的基本结构。
其次,凸轮的工作原理是利用凸轮轮廓的不规则形状来控制运
动部件的运动。
当凸轮轴旋转时,凸轮轮廓会推动凸轮座上的运动
部件,使其产生直线运动或者复杂的运动轨迹。
通过合理设计凸轮
轮廓的形状,可以实现各种不同的运动控制效果。
最后,凸轮在机械传动中有着广泛的应用。
它常常被用于发动
机的气门控制系统中,通过凸轮的旋转来控制气门的开闭,从而实现发动机的正常工作。
此外,凸轮还被应用于纺织机械、冲压机械等领域,用于控制各种不同的运动部件。
综上所述,凸轮作为机械传动中常用的机构,具有结构简单、工作可靠、应用广泛的特点。
通过合理设计凸轮的结构和轮廓,可以实现对运动部件的精确控制,从而实现各种不同的机械运动。
在未来的机械设计中,凸轮仍然会发挥重要的作用,为各种机械设备的运动控制提供可靠的解决方案。
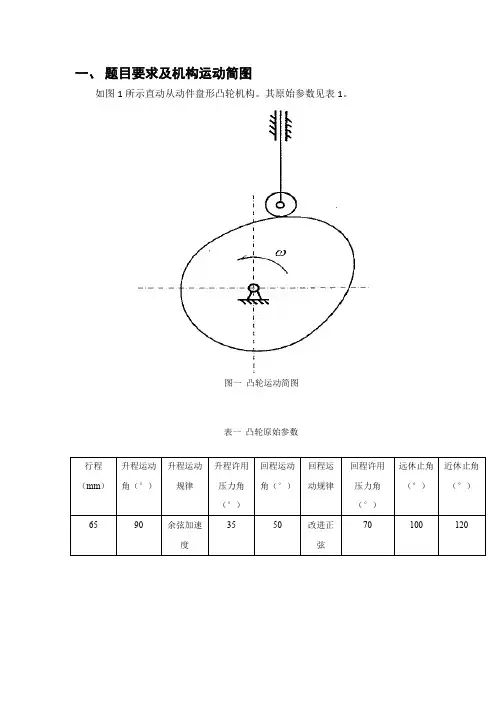
一、题目要求及机构运动简图如图1所示直动从动件盘形凸轮机构。
其原始参数见表1。
图一凸轮运动简图表一凸轮原始参数二、计算流程框图凸轮机构分析建立数学模型位移方程速度方程加速度方程速度线图位移线图加速线图ds/dΨ-s曲线升程压力角回程压力角确定轴向及基圆半径压力角图确定滚子半径实际轮廓理论轮廓轮廓图结束三、建立数学模型1.从动件运动规律方程首先,由于设计凸轮轮廓与凸轮角速度无关,所以不妨设凸轮运动角速度为w = 1rad/s。
(1)推程运动规律(0 < φ < 90°)s=φ)v=φφ)a=φφ)式中:h=65mm,Φ0=π/2(2)远休程运动规律(90°< φ < 190°)s = 65mmv = 0a = 0(3)回程运动规律(190°< φ < 240°)(190°< φ < 196.25°)(196.25°< φ < 233.75°)(233.75°< φ < 240°) 回程运动中的速度和加速度为位移对时间t的倒数:(4)近休程运动规律(240°< φ < 360°)s = 0v = 0a = 02.从动件位移、速度、加速度线图(1)位移线图(2)速度线图(3)加速度线图(4)位移、速度、加速度线图MATLAB源程序%% 已知条件h = 65; %mmphi_0 = 90./180*pi; %radalpha_up_al = 35./180*pi; %升程许用压力角phi_00 = 50./180*pi;alpha_down_al = 70./180*pi; %回程许用压力角phi_s = 100./180*pi;phi_ss = 120./180*pi;w = 1;%% 绘制从动件位移、速度、加速度线图% 推程阶段t_up = 0 : 0.5 : 90;t_up1 = t_up./180*pi;syms t_up1phi_up s_up v_up a_upphi_up = w.*t_up1;s_up = h./2.*(1 - cos(pi.*phi_up./phi_0));v_up = diff(s_up,t_up1);a_up = diff(v_up,t_up1);s_up1 = double(subs(s_up,t_up./180*pi));v_up1 = double(subs(v_up,t_up./180*pi));a_up1 = double(subs(a_up,t_up./180*pi));% 远休程t_s = 90 : 0.5 : (90+100);t_s1 = t_up./180*pi;s_s(1:201) = h;v_s(1:201) = 0;a_s(1:201) = 0;% 回程阶段1t_down1 = (90+100) : 0.5 : (90+100+50/8);t_down11 = t_down1./180*pi;syms t_down11phi_down1s_down1v_down1a_down1phi_down1 = w.*t_down11;s_down1 = h - h./(4+pi).*(pi.*(phi_down1 - phi_0 - phi_s)./phi_00 - ...sin(4.*pi.*(phi_down1 - phi_0 - phi_s)./phi_00)./4);v_down1 = diff(s_down1,t_down11);a_down1 = diff(v_down1,t_down11);s_down11 = double(subs(s_down1,t_down1./180*pi));v_down11 = double(subs(v_down1,t_down1./180*pi));a_down11 = double(subs(a_down1,t_down1./180*pi));% 回程阶段2t_down2 = (90+100+50/8) : 0.5 : (90+100+7*50/8);t_down22 = t_down2./180*pi;syms t_down22phi_down2s_down2v_down2a_down2phi_down2 = w.*t_down22;s_down2 = h - h./(4+pi).*(2+pi.*(phi_down2 - phi_0 - phi_s)./phi_00 - 9.*sin(pi./3 + 4.*pi.*(phi_down2 - phi_0 - phi_s)./(3.*phi_00))./4);v_down2 = diff(s_down2,t_down22);a_down2 = diff(v_down2,t_down22);s_down22 = double(subs(s_down2,t_down2./180*pi));v_down22 = double(subs(v_down2,t_down2./180*pi));a_down22 = double(subs(a_down2,t_down2./180*pi));% 回程阶段3t_down3 = (90+100+7*50/8) : 0.5 : (90+100+50);t_down33 = t_down3./180*pi;syms t_down33phi_down3s_down3v_down3a_down3phi_down3 = w.*t_down33;s_down3 = h - h./(4+pi).*(4+pi.*(phi_down3 - phi_0 - phi_s)./phi_00 - …sin(4.*pi.*(phi_down3 - phi_0 - phi_s)./phi_00)./4);v_down3 = diff(s_down3,t_down33);a_down3 = diff(v_down3,t_down33);s_down33 = double(subs(s_down3,t_down3./180*pi));v_down33 = double(subs(v_down3,t_down3./180*pi));a_down33 = double(subs(a_down3,t_down3./180*pi));% 近休程t_ss = (90+100+50) : 0.5 : 360;s_ss(1:241) = 0;v_ss(1:241) = 0;a_ss(1:241) = 0;% 绘图位移t = [t_up t_s t_down1 t_down2 t_down3 t_ss];phi = w .* t ./ 180 .*pi;s = [s_up1 s_s s_down11 s_down22 s_down33 s_ss];v = [v_up1 v_s v_down11 v_down22 v_down33 v_ss];a = [a_up1 a_s a_down11 a_down22 a_down33 a_ss];figure('Name','从动件位移-时间线图');plot(t,s,'k','linewidth',1.0);grid on;title('从动件位移-时间线图');xlabel('转角\phi / 度');ylabel('位移h/mm');% 绘图速度figure('Name','从动件速度-时间线图');plot(t,v,'k','linewidth',1.0);grid on;title('从动件速度-时间线图');xlabel('转角\phi / 度');ylabel('速度v/mm*s^{-1}');% 绘图加速度figure('Name','从动件加速度-时间线图');plot(t,a,'k','linewidth',1.0);grid on;title('从动件加速度-时间线图');xlabel('转角\phi / 度');ylabel('加速度a/mm*s^{-2}');3.绘制ds/dΦ线图并确定基圆半径和偏距(1)绘制ds/dΦ线图及源程序①MATLAB源程序:%% 绘制ds/dphi-s线图,确定基圆半径和偏距ds_dphi = v ./ w;figure('Name','凸轮ds/dphi - s线图');plot(ds_dphi,s,'k','linewidth',1.5);hold on;axis([-150 150 -70 70]);grid on;title('凸轮ds/dphi - s线图');xlabel('ds/dphi / (mm*s^{-2})');ylabel('s/mm');% 三条临界线x = linspace(-150,150,301);k_up = tan(pi/2 - alpha_up_al);y_up = k_up.*x - 66;plot(x,y_up,'linewidth',1.5);k_down = - tan(pi/2 - alpha_down_al);y_down = k_down.*x - 24.7;plot(x,y_down,'linewidth',1.5);x0 = linspace(0,150,151);k0 = - tan(alpha_up_al);y0 = k0.*x0;plot(x0,y0,'--');% 由图像选取凸轮基圆半径为r0 = sqrt(23^2 + 34^2) = 41 mm,偏距e = 23mm plot(23,-34,'or');r0 = 41;e = 23;plot(linspace(0,23,10),linspace(0,-34,10),'r',linspace(0,23,10),linspace(-34,-34,10),'r',li nspace(23,23,10),linspace(0,-34,10),'r','linewidth',1.0);(2)确定基圆半径和偏距在凸轮机构的ds/d φ-s 线图里再作斜直线Dt-dt 与升程的[ds/d φ-s]曲线相切并使与纵坐标夹角为升程许用压力角[α],则Dt-dt 线的右下方为选择凸轮轴心的许用区。
机械原理大作业(二)作业名称:凸轮机构设计设计题目:23题院系:班级:设计者:学号:指导教师:设计时刻:哈尔滨工业大学机械设计1.运动分析题目:设计直动从动件盘形凸轮机构,其原始参数见下表2.确信凸轮机构推杆升程、回程运动方程(设定角速度为ω=10 rad/s)升程:0°< Φ < 120°由公式可得:s=60-60*cos(3*Φ/2);v=90*ω*sin(3*Φ/2);a=135*ω2 *cos(3*Φ/2);远停止:120°< Φ < 200°由公式可得:s=120;v=0;a=0;回程:200°< Φ < 290°由公式可得:s=h[1-(10T23-15T24+6T25)]v=(-30hω1/Φ0')T22(1–2T2+T22)a=(-60hω12/Φ0'2)T2(1–3T2+2T22)式中:T2=(Φ-Φ0-Φs)/ Φ0'近停止: 290°< Φ < 360°由公式可得:s=0;v=0;a=0;3.绘制推杆位移、速度、加速度线图(设ω=10rad/s)1) 推拉位移曲线代码:%推杆位移曲线;x=0:(pi/1000):(2*pi/3);s1=60-60*cos(1.5*x);y=(2*pi/3):(pi/1000):(10*pi/9);s2=120;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;s3=120*(1-(10*T2.^3-15*T2.^4+6*T2.^5));m=(29*pi/18):(pi/1000):(2*pi);s4=0;plot(x,s1,'b',y,s2,'b',z,s3,'b',m,s4,'b'); xlabel('角度(rad)');ylabel('行程(mm)');title('推杆位移曲线');grid;2)推杆速度曲线代码:%推杆速度曲线;w=10;x=0:(pi/1000):(2*pi/3);v1=90*w*sin(1.5*x);y=(2*pi/3):(pi/1000):(10*pi/9);v2=0;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;v3=(-30*120*w/(pi/2))*T2.^2.*(1-2*T2.^2+T2.^2); % v3=-120*w*sin(2*z-20*pi/9);m=(29*pi/18):(pi/1000):(2*pi);v4=0;plot(x,v1,'r',y,v2,'r',z,v3,'r',m,v4,'r'); xlabel('角度(rad)');ylabel('速度(mm/s)');title('推杆速度曲线(w=10rad/s)');grid;3)凸轮推杆加速度曲线代码:%凸轮推杆加速度曲线;w=10;x=0:(pi/1000):(2*pi/3);a1=135*w^2*cos(3*x/2);y=(2*pi/3):(pi/1000):(10*pi/9);a2=0;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;a3=(-60*120*w^2/(pi/2)^2)*T2.*(1-3*T2.^2+2*T2.^2); m=(29*pi/18):(pi/1000):(2*pi);a4=0;plot(x,a1,'m',y,a2,'m',z,a3,'m',m,a4,'m');xlabel('角度(rad)');ylabel('加速度(mm/s^2)');title('凸轮推杆加速度曲线(w=10rad/s)');grid;4)绘制凸轮机构的dd/dd−d线图,并依次确信凸轮的基圆半径和偏距代码:%dd/dd−d线图,确信e,s0;x=0:(pi/1000):(2*pi/3);s1=60-60*cos(1.5*x);ns1=90*sin(1.5*x);y=(2*pi/3):(pi/1000):(10*pi/9);s2=120;ns2=0;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;s3n=120*(1-(10*T2.^3-15*T2.^4+6*T2.^5));ns3=-120*10*3*T2.^2+120*15*4*T2.^3-120*6*5*T2.^4 ;m=(29*pi/18):(pi/1000):(2*pi);s4=0;ns4=0;x1=0:pi/36000:pi/2;s1n=60-60*cos(1.5*x1);v1=90*sin(1.5*x1);m1=diff(s1n);%求切线1n1=diff(v1);z=m1./n1;for i=1:length(z);if abs(z(i)+tan(-55*pi/180))<0.001;breakendendb11=s1n(i)-z(i)*v1(i);x1=-300:200;y01=z(i)*x1+b11;%切线1k1=z(i);plot(x1,y01)x3=10*pi/9:pi/36000:14*pi/9;%求切线2s3n=120*(1-(10*T2.^3-15*T2.^4+6*T2.^5));v3=-120*10*3*T2.^2+120*15*4*T2.^3-120*6*5*T2.^4 ;m3=diff(s3n);n3=diff(v3);p=m3./n3;for o=1:length(p);if abs(p(o)-tan(-25*pi/180))<0.01;breakendendo;b33=s3n(o)-p(o)*v3(o);x3=-300:700;y03=p(o)*x3+b33;%切线2plot(x3,y03);sym uv[u,v]=solve('u= 1.4281*v-81.7665','u=-0.4663*v-59.6715');%v=11.66332347972972972972972972973 x%u=-65.110107738597972972972972972973 yplot(ns1,s1,'m',ns2,s2,'b',ns3,s3n,'b',ns4,s4,'b',x1,y01,'g',x3,y03,'g',v,u,'*'); xlabel('ds/d¦µ');ylabel('S');axis([-300,200,-300,300]);title('s0,e 的确信');grid;确信凸轮基圆半径与偏距:偏距e=90mm,d020mm;基圆半径为d0=150mm。
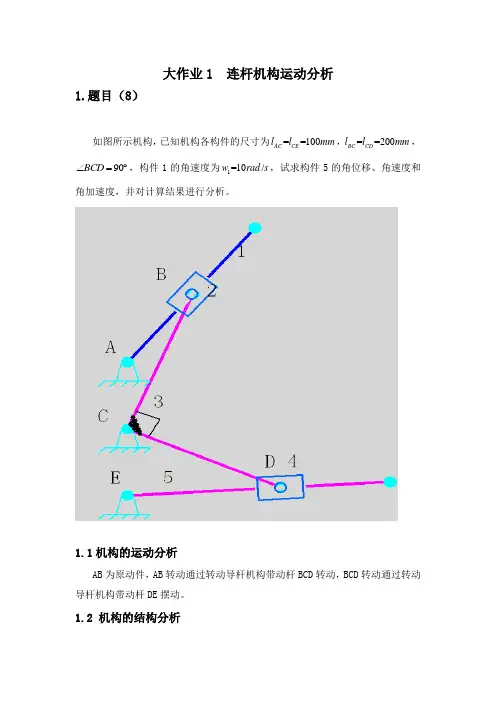
大作业1连杆机构运动分析1.题目(8)如图所示机构,已知机构各构件的尺寸为==100AC CE l l mm ,==200BC CD l l mm ,90BCD ∠=︒,构件1的角速度为1=10/w rad s ,试求构件5的角位移、角速度和角加速度,并对计算结果进行分析。
1.1机构的运动分析AB 为原动件,AB 转动通过转动导杆机构带动杆BCD 转动,BCD 转动通过转动导杆机构带动杆DE 摆动。
1.2 机构的结构分析杆组可以划分为一个RR I级杆组(杆1)、RRPII级杆组(滑块2,杆3)、RPRII 级杆组(滑块4,杆5)(1)RRI级杆组1:(2)RRPII级杆组2,3:(3)RPRII级杆组4,5:2.分析过程 2.1 建立坐标系建立以点E 为原点的固定平面直角坐标系x-E-y ,如图所示。
2.2 建立数学模型(1)构件1、2、3的分析原动件杆1的转角:1θ=0--360。
原动件杆1的角速度:1ω=.1θ=10/rad s 原动件杆1的角加速度:..1αθ==0运动副A 的坐标:0200A A x y mm =⎫⎬=⎭运动副A 的速度及加速度都为零。
构件1为BC (RRP Ⅱ级杆组)上滑块B 的导路 滑块B 的位置为:132cos cos B A C x x s x l θθ=+=+132sin sin B A C y y s x l θθ=+=+消去s,得:0212arcsinA l θθ=+式中:011()sin ()cos C A C A A x x y y θθ=---构件3的角速度i ω和滑块B 沿导路的移动速度D υ:.211213(Q sin Q cos )/Q ωϕθθ==-+ 1322323(Q cos Q sin )/Q D s l l υθθ⋅==-+式中:..11111211321212Q sin ;Q cos ;Q sin sin cos sin l l l θθθθθθθθ=-==+构件3的角加速度和滑块B 沿导路移动的加速度:..241513(Q sin Q cos )/Q αθθθ==-+..4325323(Q cos Q sin )/Q B s l l υθθ==-+式中:122......21142211111Q cos sin cos 2sin l l l s θθθθθθθθ=---- 122......21152211111Q sin cos sin 2cos l l l s θθθθθθθθ=+-+(2)构件3,4,5的分析构件3,4,5,由1个Ⅰ级基本杆组和一个RRP Ⅱ级杆组组成,与构件1,2,3结构相同,只运动分析过程与其相反。
1 / 17机械原理大作业课程名称:机械原理 设计题目:直动从动件盘形凸轮机构 院 系: 机电学院 班 级: 完 成 者: 学 号: 指导教师: 设计时间:哈尔滨工业大学题目:如图所示直动从动件盘形凸轮机构,其原始参数见表,据此设计该凸轮机构。
凸轮运动分为五个阶段1.升程阶段0~5034500010156s h ϕϕϕ⎡⎤⎛⎫⎛⎫⎛⎫⎢⎥=⨯-⨯+⨯ ⎪ ⎪ ⎪ΦΦΦ⎢⎥⎝⎭⎝⎭⎝⎭⎣⎦23410000306030h v ωϕϕϕ⎡⎤⎛⎫⎛⎫⎛⎫⎢⎥=⨯-⨯+⨯ ⎪ ⎪ ⎪ΦΦΦΦ⎢⎥⎝⎭⎝⎭⎝⎭⎣⎦23212000060180120h a ωϕϕϕ⎡⎤⎛⎫⎛⎫⎛⎫⎢⎥=⨯-⨯+⨯ ⎪ ⎪ ⎪ΦΦΦΦ⎢⎥⎝⎭⎝⎭⎝⎭⎣⎦2.远休止50~1503.回程等加速150~195()20'202sh s h ϕ=--Φ-ΦΦ()10'204s h s ωϕ=--Φ-ΦΦ21'204h v ω=Φ4.回程等减速195~240()2'00'202s h s ϕ=Φ+Φ+Φ-Φ()'100'204s h v ωϕ=-Φ+Φ+Φ-Φ21'204h v ω=-Φ5.近休止 240~360其中,0Φ 推程运动角 s Φ 远休止角 '0Φ 回程运动角使用Matlab 实现1.从动件位移%用fi1,fi2,fi3,fi4,fi5代替转角h=20;fio1=5*pi/18;fis=5*pi/9;fio2=pi/2;fi1=0:0.01:fio1;dfi=fi1/fio1;s1=h*(10*(fi1/fio1).^3-15*(fi1/fio1).^4+6*(fi1/fio1).^5); hold onplot(180*fi1/pi,s1);fi2=fio1:0.01:fio1+fis;s2=h;hold onplot(180*fi2/pi,s2);fi3=fio1+fis:0.01:fio1+fis+fio2/2;s3=h-2*h/fio2^2*(fi3-fio1-fis).^2;hold onplot(180*fi3/pi,s3);fi4=fio1+fis+fio2/2:0.001:fio1+fis+fio2;s4=2*h/fio2^2*(fio1+fis+fio2-fi4).^2;hold onplot(180*fi4/pi,s4);fi5=fio1+fis+fio2:0.001:2*pi;s5=0;hold onplot(180*fi5/pi,s5);title('位移');xlabel('φ/度'),ylabel('s/mm');grid onhold off2.从动件速度%用fi1,fi2,fi3,fi4,fi5代替转角%设角速度为1rad/sw=1;h=20;fio1=5*pi/18;fis=5*pi/9;fio2=pi/2;fi1=0:0.01:fio1;dfi=fi1/fio1;v1=h*w/fio1*(30*(fi1/fio1).^2-60*(fi1/fio1).^3+30*(fi1/fio1).^4); hold onplot(180*fi1/pi,v1);fi2=fio1:0.01:fio1+fis;v2=0;hold onplot(180*fi2/pi,v2);fi3=fio1+fis:0.01:fio1+fis+fio2/2;v3=-4*h*w/fio2^2*(fi3-fio1-fis);hold onplot(180*fi3/pi,v3);fi4=fio1+fis+fio2/2:0.001:fio1+fis+fio2;v4=-4*h*w/fio2^2*(fio1+fis+fio2-fi4);hold onplot(180*fi4/pi,v4);fi5=fio1+fis+fio2:0.001:2*pi;v5=0;hold onplot(180*fi5/pi,v5);title('速度');xlabel('φ/度'),ylabel('v/(mm/s)');grid onhold off3.从动件加速度%用fi1,fi2,fi3,fi4,fi5代替转角%设角速度为1rad/sw=1;h=20;fio1=5*pi/18;fis=5*pi/9;fio2=pi/2;fi1=0:0.01:fio1;dfi=fi1/fio1;a1=h*w^2/fio1*(60*(fi1/fio1)-180*(fi1/fio1).^2+120*(fi1/fio1).^3); hold onplot(180*fi1/pi,a1);fi2=fio1:0.01:fio1+fis;a2=0;hold onplot(180*fi2/pi,a2);fi3=fio1+fis:0.01:fio1+fis+fio2/2;a3=-4*h*w/fio2^2;hold onplot(180*fi3/pi,a3);fi4=fio1+fis+fio2/2:0.001:fio1+fis+fio2;a4=4*h*w/fio2^2;hold onplot(180*fi4/pi,a4);fi5=fio1+fis+fio2:0.001:2*pi;a5=0;hold onplot(180*fi5/pi,a5);title('加速度');xlabel('φ/度'),ylabel('v/(mm/s^2)');grid onhold off4.sdsdϕ-线图%用fi1,fi2,fi3,fi4,fi5代替转角h=20;fio1=5*pi/18;fis=5*pi/9;fio2=pi/2;fi1=0:0.01:fio1;s1=h*(10*(fi1/fio1).^3-15*(fi1/fio1).^4+6*(fi1/fio1).^5);ds1=h*(3*10*(fi1/fio1).^2/fio1-4*15*(fi1/fio1).^3/fio1+5*6*(fi1/fio1).^4/fio1);hold onplot(ds1,s1);fi2=fio1:0.01:fio1+fis;s2=h+0*fi2;ds2=0*fi2;hold onplot(ds2,s2);fi3=fio1+fis:0.01:fio1+fis+fio2/2;s3=h-2*h/fio2^2*(fi3-fio1-fis).^2; ds3=-2*h/fio2^2*2*(fi3-fio1-fis); hold onplot(ds3,s3);fi4=fio1+fis+fio2/2:0.001:fio1+fis+fio2; s4=2*h/fio2^2*(fio1+fis+fio2-fi4).^2; ds4=-2*h/fio2^2*2*(fio1+fis+fio2-fi4); hold onplot(ds4,s4);fi5=fio1+fis+fio2:0.001:2*pi; s5=0+0*fi5; ds5=0*fi5; hold onplot(ds5,s5);title('ds/d φ-s');xlabel('ds/d φ(mm/rad)'),ylabel('s(mm)'); grid on hold off5.凸轮轴心位置的确定凸轮压力角的正切值s s ed ds +-=0/tan ϕα,右侧为升程,作与s 轴夹6π角等于升程许用压力角的切界线t t dD ,则在直线上或其下方取凸轮轴心时,可使[]αα≤,同理右侧回程,作与s 轴夹角等于回程许用压力角3π的切界线''t t d D ,则在直线上或其下方取凸轮轴心时,可使[]αα≤。
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业二课程名称:机械原理设计题目:凸轮机构设计院系:能源学院班级: 1302402 设计者:黄建青学号: 1130240222 指导教师:焦映厚陈照波设计时间: 2015年06月23日凸轮机构设计说明书1. 设计题目设计直动从动件盘形凸轮机构,机构运动简图如图1,机构的原始参数如表1所示。
图1 机构运动简图表1 凸轮机构原始参数序号升程升程运动角升程运动规律升程许用压力角回程运动角回程运动规律回程许用压力角远休止角近休止角13 45mm 50°余弦加速度35°90°抛-直-抛70°100°120°计算流程框图:2. 凸轮推杆升程,回程运动方程及推杆位移、速度、加速度线图2.1 确定凸轮机构推杆升程、回程运动方程 设定角速度为ω=1 rad/s(1) 升程:0°<φ<50°由公式可得 )]cos(1[20ϕπΦh s -=计算推程、回程的推杆s 、v 、a运动线图及凸轮dss d ϕ-线图 确定凸轮机构基圆半径和偏距计算曲率半径和压力角,确定滚子半径确定凸轮的理论廓线和实际廓线)s i n (2001ϕπωπΦΦh v =)cos(2020212ϕπωπΦΦh a =(2) 远休止:50°<φ<150° 由公式可得s = 45 v = 0a = 0(3) 回程:150°<φ<240° 由公式得:()()2200002000000022000000,2(1)(1)1,12(1)(1),2(1)s s s s s s s s s Φhn s h ΦΦΦΦΦΦn Φn ΦΦn h n s h ΦΦΦΦΦΦn Φn n ΦΦΦn hn s ΦΦΦΦΦn Φn ϕϕϕϕϕϕ'⎧=---+<≤++⎪'-⎪⎪⎡⎤''-⎪=----++<≤++⎨⎢⎥'-⎣⎦⎪⎪'---⎪'=-++<≤++'-⎪⎩2010000001000200100000n (),(1)(1)n ,(1)(1)n (1),(1)s s s s s s s s Φh v ΦΦΦΦΦΦn Φn ΦΦn h v ΦΦΦΦn Φn n ΦΦΦn h v ΦΦΦΦΦn ΦΦn ωϕϕωϕϕωϕ⎧'=---+<≤++⎪'-⎪⎪''-⎪=-++<≤++⎨'-⎪⎪'---'⎪=--++<≤++''-⎪⎩220100200000220100020n ,(1)(1)0,(1)n ,(1)s s s s s s Φh a ΦΦΦΦn Φn ΦΦn a ΦΦΦΦn n Φn h a ΦΦΦΦΦn Φn ωϕϕωϕ'⎧=-+<≤++⎪'-⎪⎪''-=++<≤++⎨⎪⎪'-'=-++<≤++⎪'-⎩式中 Φ0——推程运动角; Φs ——远休止角;Φ0‘——回程运动角。
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业二课程名称:机械原理设计题目: 凸轮机构设计院系:班级:设计者:学号:指导教师:哈尔滨工业大学一、设计题目如右图所示直动从动件盘形凸轮机构,选择一组凸轮机构的原始参数,据此设计该凸轮机构。
凸轮机构原始参数序号升程(mm)升程运动角升程运动规律升程许用压力角27130150正弦加速度30°回程运动角回程运动规律回程许用压力角远休止角近休止角100°余弦加速度60°30°80°二. 凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图凸轮推杆升程运动方程:)]512sin(2156[130s ϕππϕ-= )512sin(4.374)]512cos(1[156v 211ϕπϕπωω=-=a% t 表示转角,s 表示位移t=0:0.01:5*pi/6;%升程阶段s= [(6*t)/(5*pi )- 1/(2*pi )*sin(12*t/5)]*130; hold on plot(t ,s ); t= 5*pi/6:0。
01:pi; %远休止阶段s=130; hold on plot(t,s );t=pi :0.01:14*pi/9;%回程阶段s=65*[1+cos(9*(t-pi )/5)]; hold on plot(t ,s );t=14*pi/9:0.01:2*pi ;s=0;hold onplot(t,s);grid onhold off%t表示转角,令ω1=1t=0:0。
01:5*pi/6;%升程阶段v=156*1*[1-cos(12*t/5)]/pi hold onplot(t,v);t= 5*pi/6:0。
01:pi;v=0hold onplot(t,v);t=pi:0.01:14*pi/9;%回程阶段v=—117*1*sin(9*(t—pi)/5) hold onplot(t,v);t=14*pi/9:0。
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业二课程名称:机械原理设计题目:凸轮机构设计一.设计题目设计直动从动件盘形凸轮机构,凸轮机构原始参数 序号 升程(mm) 升程运动角(º) 升程运 动规律升程许用压力角(º) 回程运动角(º)回程运 动规律回程许用压力角(º)远休止角 (º)近休止角 (º) 22 120 90等加等减速 4080等减等加速 70 70120二. 凸轮推杆运动规律1.运动规律(等加速等减速运动) 推程 0450≤≤ϕ2229602ϕπϕ=⎪⎪⎭⎫ ⎝⎛Φ=h sϕπωϕω2219204=Φ=h v2220219204πωω=Φ=h a推程 009045≤≤ϕ ()22220)2(9601202ϕππϕ--=-ΦΦ-=h h s())2(1920422ϕπωπϕω-=-ΦΦ=h v222219204ωπω-=Φ-=h a2.运动规律(等加速等减速运动) 回程 0200160≤≤ϕ()[]22202)98(9601202πϕπϕ--=Φ+Φ-Φ-=Sh h s()[])98(1920-4-202πϕωπϕω-=Φ+Φ-Φ=Sh v222219204ωπω-=Φ-=h a回程 0240200≤≤ϕ()[]222'002)34(9602ϕππϕ-=-Φ+Φ+ΦΦ=S h s()[])34(1920-4-2'002ϕπωπϕω-=-Φ+Φ+ΦΦ=S h v222219204ωπω=Φ=h a三.推杆位移、速度、加速度线图及凸轮sd ds-φ线图采用VB 编程,其源程序及图像如下: 1.位移:Private Sub Command1_Click()Timer1.Enabled = True '开启计时器 End SubPrivate Sub Timer1_Timer()Static i As SingleDim s As Single, q As Single 'i 作为静态变量,控制流程;s 代表位移;q 代表角度 Picture1.CurrentX = 0 Picture1.CurrentY = 0 i = i + 0.1 If i <= 45 Then q = is = 240 * (q / 90) ^ 2Picture1.PSet Step(q, -s), vbRedElseIf i >= 45 And i <= 90 Thenq = is = 120 - 240 * ((90 - q) ^ 2) / (90 ^ 2)Picture1.PSet Step(q, -s), vbGreenElseIf i >= 90 And i <= 150 Thenq = is = 120Picture1.PSet Step(q, -s), vbBlackElseIf i >= 150 And i <= 190 Thenq = is = 120 - 240 * (q - 150) ^ 2 / 6400Picture1.PSet Step(q, -s), vbBlueElseIf i >= 190 And i <= 230 Thenq = is = 240 * (230 - q) ^ 2 / 6400Picture1.PSet Step(q, -s), vbRedElseIf i >= 230 And i <= 360 Thenq = is = 0Picture1.PSet Step(q, -s), vbBlackElseEnd IfEnd Sub2.速度Private Sub Command2_Click()Timer2.Enabled = True '开启计时器End SubPrivate Sub Timer2_Timer()Static i As SingleDim v As Single, q As Single, w As Single 'i为静态变量,控制流程;q代表角度;w代表角速度,此处被赋予50Picture1.CurrentX = 0Picture1.CurrentY = 0w = 50i = i + 0.1If i <= 45 Thenq = iv = 480 * w * q / 8100Picture1.PSet Step(q, -v), vbRedElseIf i >= 45 And i <= 90 Thenq = iv = 480 * w * (90 - q) / 8100Picture1.PSet Step(q, -v), vbBlack ElseIf i >= 90 And i <= 150 Thenq = iv = 0Picture1.PSet Step(q, -v), vbGreen ElseIf i >= 150 And i <= 190 Then q = iv = -480 * w * (q - 150) / 6400Picture1.PSet Step(q, -v), vbBlue ElseIf i >= 190 And i <= 230 Thenq = iv = -480 * w * (230 - q) / 6400Picture1.PSet Step(q, -v), vbRedElseIf i >= 230 And i <= 360 Then q = iv = 0Picture1.PSet Step(q, -v), vbBlack ElseEnd IfEnd Sub3.加速度Private Sub Command3_Click()Timer3.Enabled = True '开启计时器End SubPrivate Sub Timer3_Timer()Static i As SingleDim a As Single, w As Single, q As Single 'i为静态变量,控制流程;a代表加速度;q代表角度;w代表角速度w = 50Picture1.CurrentX = 0Picture1.CurrentY = 0i = i + 0.1If i <= 45 Thenq = ia = 480 * w ^ 2 / 8100Picture1.PSet Step(q, -a), vbRedElseIf i >= 45 And i <= 90 Thenq = ia = -480 * w ^ 2 / 8100Picture1.PSet Step(q, -a), vbBlackElseIf i >= 90 And i <= 150 Thenq = ia = 0Picture1.PSet Step(q, -a), vbGreenElseIf i >= 150 And i <= 190 Thenq = ia = -480 * w ^ 2 / 6400Picture1.PSet Step(q, -a), vbBlueElseIf i >= 190 And i <= 230 Thenq = ia = 480 * w ^ 2 / 6400Picture1.PSet Step(q, -a), vbRedElseIf i >= 230 And i <= 360 Thenq = ia = 0Picture1.PSet Step(q, -a), vbBlackElseEnd IfEnd Sub4.ds/dq---dsPrivate Sub Command4_Click()Timer4.Enabled = True '开启计时器;建立坐标系Picture1.Scale (-400, -400)-(400, 400)End SubPrivate Sub Timer4_Timer()Static i As SingleDim x As Single, s As Single, q As Single, scaley As Single, t As Single 'i为静态变量,控制流程;x代表位移;s代表纵坐标ds/dq;q代表角度Picture1.CurrentX = 0Picture1.CurrentY = 0scaley = 1t = 3.14 / 180i = i + 0.1If i <= 45 Thenq = i * tx = 194.734 * qs = 240 * (2 * q / 3.14) ^ 2Picture1.PSet Step(x, -s), vbRedElseIf i >= 45 And i <= 90 Thenq = i * tx = 194.734 * (3.14 / 2 - q)s = 120 - 97.367 * (3.14 / 2 - q) ^ 2Picture1.PSet Step(x, -s), vbRedElseIf i >= 90 And i <= 150 Thenq = i * tx = 0s = 120 * scaleyPicture1.PSet Step(x, -s), vbRedElseIf i >= 150 And i <= 190 Thenq = i * tx = -246.46 * (q - 5 * 3.14 / 6)s = 120 - 123.23 * (q - 5 * 3.14 / 6) ^ 2Picture1.PSet Step(x, -s), vbRedElseIf i >= 190 And i <= 230 Thenq = i * tx = -246.46 * (23 * 3.14 / 18 - q)s = 123.23 * (23 * 3.14 / 18 - q) ^ 2Picture1.PSet Step(x, -s), vbRedElseIf i >= 230 And i <= 360 Thenq = i * tx = 0s = 0Picture1.PSet Step(x, -s), vbRedElseEnd IfEnd Sub四.确定凸轮基圆半径和偏距1. 求切点转角在图中,右侧曲线为升程阶段的类速度-位移图,作直线D t d t与其相切,且位移轴正方向呈夹角[ 1]=300,则切点处的斜率与直线D t d t的斜率相等,因为k Dtdt=tan600,右侧曲线斜率可以表示为:q;q=tan600继而求出切点坐标(337.272,292.084)。
机械原理大作业(二) 作业名称:机械原理设计题目:凸轮机构设计院系: 机电工程学院班级:设计者:学号:指导教师:丁刚陈明设计时间:哈尔滨工业大学机械设计1、设计题目如图所示直动从动件盘形凸轮机构,根据其原始参数设计该凸轮。
表一:凸轮机构原始参数序号升程(mm) 升程运动角(º)升程运动规律升程许用压力角(º)回程运动角(º)回程运动规律回程许用压力角(º)远休止角(º)近休止角(º)12 80 150正弦加速度30 100 正弦加速度60 60 502、凸轮推杆运动规律(1)推杆升程运动方程S=h[φ/Φ0-sin(2πφ/Φ0)]V=hω1/Φ0[1-cos(2πφ/Φ0)]a=2πhω12sin(2πφ/Φ0)/Φ02式中:h=150,Φ0=5π/6,0<=φ<=Φ0,ω1=1(为方便计算)(2)推杆回程运动方程S=h[1-T/Φ1+sin(2πT/Φ1)/2π]V= -hω1/Φ1[1-cos(2πT/Φ1)]a=-2πhω12sin(2πT/Φ1)/Φ12式中:h=150,Φ1=5π/9,7π/6<=φ<=31π/18,T=φ-7π/63、运动线图及凸轮线图运动线图:用Matlab编程所得源程序如下:t=0:pi/500:2*pi;w1=1;h=150;leng=length(t);for m=1:leng;if t(m)<=5*pi/6S(m) = h*(t(m)/(5*pi/6)-sin(2*pi*t(m)/(5*pi/6))/(2*pi));v(m)=h*w1*(1-cos(2*pi*t(m)/(5*pi/6)))/(5*pi/6);a(m)=2*h*w1*w1*sin(2*pi*t(m)/(5*pi/6))/((5*pi/6)*(5*pi/6));% 求退程位移,速度,加速度elseift(m)<=7*pi/6S(m)=h;v(m)=0;a(m)=0;% 求远休止位移,速度,加速度elseif t(m)<=31*pi/18T(m)=t(m)-21*pi/18;S(m)=h*(1-T(m)/(5*pi/9)+sin(2*pi*T(m)/(5*pi/9))/(2*pi));v(m)=-h/(5*pi/9)*(1-cos(2*pi*T(m)/(5*pi/9)));a(m)=-2*pi*h/(5*pi/9)^2*sin(2*pi*T(m)/(5*pi/9));%求回程位移,速度,加速度elseS(m)=0;v(m)=0;a(m)=0;% 求近休止位移,速度,加速度endend推杆位移图推杆速度图推杆加速度图4、确定凸轮基圆半径与偏距在凸轮机构得ds/dφ-s线图里再作斜直线Dt dt与升程得[ds/dφ-s(φ)]曲线相切并使与纵坐标夹角为升程许用压力角[α],则D t d t线得右下方为选择凸轮轴心得许用区。
机械原理大作业凸轮凸轮是一种常见的机械传动装置,通过其特殊的轮廓形状和旋转运动,可以实现对连杆机构的运动控制。
在机械原理的学习中,凸轮是一个重要的研究对象,其设计和运用涉及到机械工程、动力学、运动学等多个学科领域。
本文将从凸轮的基本原理、结构特点、工作原理和应用范围等方面进行介绍和分析。
首先,凸轮的基本原理是利用凸轮轮廓的不规则形状,在旋转运动中对连杆机构施加不同的力和运动规律,从而实现对机械装置的运动控制。
凸轮的轮廓可以是圆形、椭圆形、心形等多种形状,根据具体的运动要求和传动方式来设计选择。
凸轮的轮廓形状决定了其在运动中对连杆机构的推动和拉动效果,是凸轮传动的关键。
其次,凸轮的结构特点主要包括凸轮轴、凸轮轮廓和凸轮支撑等部分。
凸轮轴是凸轮的轴心部分,通过轴承和传动装置与动力源相连,实现旋转运动。
凸轮轮廓是凸轮的轮廓外形,根据具体的运动要求和传动方式进行设计和加工。
凸轮支撑是凸轮的固定支撑装置,通常由轴承、轴套和固定座等部分组成,用于支撑和固定凸轮的运动。
凸轮的工作原理是利用凸轮轮廓的不规则形状,在旋转运动中对连杆机构施加不同的力和运动规律,从而实现对机械装置的运动控制。
当凸轮轴转动时,凸轮轮廓与连杆机构发生接触和相互作用,通过凸轮的推动和拉动作用,实现对连杆机构的运动控制。
凸轮的工作原理是基于凸轮轮廓的不规则形状和旋转运动,通过对连杆机构施加不同的力和运动规律,实现对机械装置的运动控制。
最后,凸轮在机械工程中有着广泛的应用范围,常见的应用包括发动机气门控制、机床加工控制、自动化生产线等领域。
在发动机气门控制中,凸轮通过其特殊的轮廓形状和旋转运动,实现对气门的开启和关闭,从而控制气缸内气体的进出。
在机床加工控制中,凸轮通过其特殊的轮廓形状和旋转运动,实现对工件的加工和定位,从而实现精密加工和高效生产。
在自动化生产线中,凸轮通过其特殊的轮廓形状和旋转运动,实现对工件的输送和定位,从而实现自动化生产和装配。
机械原理大作业(二)
作业名称:机械原理
设计题目:凸轮机构
班级:
设计者:
学号:
指导教师:
设计时间:
哈尔滨工业大学机械设计
1. 设计题目
(1) 凸轮机构运动简图:
2.凸轮推杆升程,回程运动方程及推杆位移,速度,加速度线图
(1) 推杆升程,回程运动方程如下:
A.推杆升程方程: 设为ω1rad/s
)],2
3
cos(1[30)(Φ-=Φs ;3/20π≤Φ≤
)),23
sin(45)(Φ=Φv ;3/20π≤Φ≤
),2
3
cos(2135)(Φ=
Φa ;3/20π≤Φ≤
B.推杆回程方程:
],2310[
60)(Φ-=Φπs ;3567ππ≤Φ≤ ,120)(π-=Φv ;3
5
67ππ≤Φ≤
,0)(=Φa ;3
5
67ππ≤Φ≤
2)推杆位移,速度,加速度线图如下: A.推杆位移线图
凸轮位移B.推杆速度线图
凸轮速度C.推杆加速度线图
凸轮速度
3.凸轮机构的错误!未找到引用源。
-s线图,并依次确定凸轮的基圆半径和偏距.
1) 凸轮机构的错误!未找到引用源。
-s线图:
(2)确定凸轮的基圆半径和偏距:
由图知:可取错误!未找到引用源。
=400 mm,e=100mm
即:基圆半径错误!未找到引用源。
=错误!未找到引用源。
=412.31mm 偏距e=100mm
4.滚子半径的确定及凸轮理论轮廓和实际轮廓的绘制.
可取滚子半径r=60mm,则凸轮理论轮廓和实际轮廓如下:
(1) 程序如下
fai01=2*pi/3;
fai02=pi/2;
fais1=pi/2;
fais2=5*pi/9;
h=60;
fai1=0:0.001*pi:2*pi/3;
fai2=2*pi/3:0.001*pi:7*pi/6;
fai3=7*pi/6:0.001*pi:5*pi/3;
fai4=5*pi/3:0.001*pi:2*pi;
s1=h/2*(1-cos(pi*fai1/fai01));
s2=h+fai2*0;
s3=h*(1-(fai3-(fai01+fais1))/fai02);
s4=fai4*0;
plot(fai1,s1,fai2,s2,fai3,s3,fai4,s4)
v1=pi*h/(2*fai01)*sin(pi*fai1/fai01);
v2=0*fai2;
v3=-h/fai02;
v4=0*fai4;
plot(fai1,v1,fai2,v2,fai3,v3,fai4,v4)
a1=2*pi*h/fai01.^2*cos(pi*fai1/fai01);
a2=0*fai2;
a3=0;
a4=0*fai4;
plot(fai1,a1,fai2,a2,fai3,a3,fai4,a4);
w1=45*sin(3*fai1/2);
w2=0;
w3=-120/pi;
w4=0;
x1=(400+s1).*cos(fai1)-100.*sin(fai1);
y1=(400+s1).*sin(fai1)+100.*cos(fai1);
x2=(400+s2).*cos(fai2)-100.*sin(fai2);
y2=(400+s2).*sin(fai2)+100.*cos(fai2);
x3=(400+s3).*cos(fai3)-100.*sin(fai3);
y3=(400+s3).*sin(fai3)+100.*cos(fai3);
x4=(400+s4).*cos(fai4)-100.*sin(fai4);
y4=(400+s4).*sin(fai4)+100.*cos(fai4);
plot(x1,y1,x2,y2,x3,y3,x4,y4);
X1=x1-60.*y11./sqrt(x11.^2+y11.^2)
plot(x11,y11);
y11=(400+s1).*cos(fai1)-100.*sin(fai1)+w1.*sin(fai1);
x11=-(400+s1).*sin(fai1)-100.*cos(fai1)+w1.*cos(fai1);
X1=x1-60.*y11./sqrt(x11.^2+y11.^2)
Y1=y1+60.*x11./sqrt(x11.^2+y11.^2);
x21=-(400+s2).*sin(fai2)-100.*cos(fai2)+w2.*cos(fai2);
y21=(400+s2).*cos(fai2)-100.*sin(fai2)+w2.*sin(fai2);
X2=x2-60.*y21./sqrt(x21.^2+y21.^2);
Y2=y2+60.*x21./sqrt(x21.^2+y21.^2);
y31=(400+s3).*cos(fai3)-100.*sin(fai3)+w3.*sin(fai3);
x31=-(400+s3).*sin(fai3)-100.*cos(fai3)+w3.*cos(fai3);
X3=x3-60.*y31./sqrt(x31.^2+y31.^2);
Y3=y3+60.*x31./sqrt(x31.^2+y31.^2);
y41=(400+s4).*cos(fai4)-100.*sin(fai4)+w4.*sin(fai4);
x41=-(400+s4).*sin(fai4)-100.*cos(fai4)+w4.*cos(fai4);
X4=x4-60.*y41./sqrt(x41.^2+y41.^2);
Y4=y4+60.*x41./sqrt(x41.^2+y41.^2);
plot(x1,y1,x2,y2,x3,y3,x4,y4,X1,Y1,X2,Y2,X3,Y3,X4,Y4); (2)图像
理论轮廓实际轮廓。