基于单片机的移栽机控制系统设计
- 格式:pdf
- 大小:288.43 KB
- 文档页数:4

全自动移栽机送苗取苗装置控制系统研究全自动移栽机送苗取苗装置控制系统研究摘要:本文基于全自动移栽机的送苗取苗装置,探讨了该装置的控制系统研究。
首先分析了该装置的工作原理和功能需求,然后详细设计了控制系统的硬件和软件模块,并进行了系统测试和性能评估。
实验结果表明,所设计的控制系统能够准确、稳定地控制全自动移栽机的送苗和取苗过程,提高了移栽效率和移栽质量。
1.引言随着农业自动化技术的发展,全自动移栽机在农业生产中的应用越来越广泛。
传统的手工移栽方式存在劳动强度大、效率低下等问题,而全自动移栽机能够实现苗木的自动送苗和取苗,不仅提高了劳动效率,还保证了移栽的质量。
然而,如果没有可靠的控制系统,全自动移栽机的运行将会受到限制。
2.装置的工作原理和功能需求全自动移栽机的送苗取苗装置是实现苗木自动移栽的关键部件。
该装置需要完成苗木的准确定位、稳定抓取、准确放置等功能。
其工作原理是通过视觉传感器侦测苗木的位置和状态,控制气动装置实现送苗和取苗的动作。
3.控制系统的设计3.1 系统硬件设计控制系统的硬件包括传感器、执行机构、控制器等。
传感器采用视觉传感器,用于侦测苗木的位置和状态。
执行机构采用气动装置,用于实现送苗和取苗的动作。
控制器采用单片机,用于接收传感器的数据并控制执行机构的运动。
3.2 系统软件设计控制系统的软件主要包括实时数据采集模块、运动控制算法模块、人机交互界面模块等。
实时数据采集模块负责接收视觉传感器的数据并进行处理。
运动控制算法模块根据传感器数据计算执行机构的运动轨迹和速度。
人机交互界面模块用于设置和监控控制系统的参数和状态。
4.系统测试和性能评估为验证所设计的控制系统的性能,我们进行了一系列的实验。
首先,我们测试了控制系统在不同工作条件下的送苗和取苗的准确性和稳定性。
实验结果表明,控制系统能够准确地将苗木送到指定位置,并稳定地抓取和放置苗木。
其次,我们测试了控制系统的响应时间和运动速度。
实验结果表明,控制系统的响应时间和运动速度满足了实际应用的需求。

基于51单片机的智能搬运机器人系统设计智能搬运机器人系统是一种能够根据预先设置的路径和任务,自主完成物品搬运的机器人系统。
本文将以51单片机为基础,设计一个简单的智能搬运机器人系统。
1. 系统架构设计:智能搬运机器人系统的基本架构由以下几个部分组成:- 外设控制模块:包括传感器模块、执行机构模块等。
传感器模块用于感知环境和物品状态,执行机构模块用于实现机器人的运动和搬运动作。
- 控制中心:由51单片机控制。
负责接收和处理传感器模块的数据,生成相应的控制信号,控制机器人的运动和搬运动作。
- 电源管理模块:包括电池管理模块、电源转换模块等。
负责为机器人供电,并保证各个模块的稳定工作。
2. 传感器模块设计:传感器模块的设计是智能搬运机器人系统的基础。
常用的传感器包括红外线传感器、超声波传感器、接近开关等。
这些传感器可以用于检测障碍物、测量距离、检测物品状态等。
3. 执行机构模块设计:执行机构模块的设计用于实现机器人的运动和搬运动作。
常用的执行机构包括直流电机、步进电机等。
直流电机可以用于机器人的运动控制,步进电机可以用于机器人的准确定位和精确搬运。
4. 控制算法设计:控制算法是智能搬运机器人系统的核心。
通过传感器模块获取的环境和物品信息,结合机器人的当前状态,控制中心根据预先设置的路径和任务,生成相应的控制信号,控制机器人的运动和搬运。
常用的控制算法包括PID算法、模糊控制算法等。
5. 路径规划设计:为了完成预先设置的路径和任务,机器人需要进行路径规划。
路径规划算法可以根据机器人的当前位置和目标位置,计算出最佳的路径。
常用的路径规划算法包括最短路径算法、A*算法等。
6. 人机交互界面设计:为了方便操作和监控机器人的运行状态,可以设计一个人机交互界面。
人机交互界面可以通过LCD显示屏、按键等方式实现。
通过人机交互界面,用户可以设置机器人的路径和任务,监控机器人的运行状态。
7. 电源管理模块设计:电源管理模块用于为机器人供电,并保证各个模块的稳定工作。

基于STM32单片机的新农业智能控制系统设计作者:邹双鸾张梦瑶陈晓登李桂梅来源:《电脑知识与技术》2023年第32期关键词:温湿度传感器;光照传感器;云平台;智能控制:远程监控:Lora中图分类号:TP391 文献标识码:A文章编号:1009-3044(2023)32-0110-05农业是我国的传统产业,也是国家支柱产业之一。
相关研究表明:我国农业劳动力成本日趋增高,农业劳动力老龄化与短缺问题逐渐凸显,农业智能化的需求日益增加。
而农作物的产量与温度、湿度、光照强度、CO₂浓度息息相关。
为能够根据农作物不同生长周期所需的环境进行智能调整,满足其合适的生长环境,提高农作物产量和农业管理的效率,笔者设计了新农业智能控制系统。
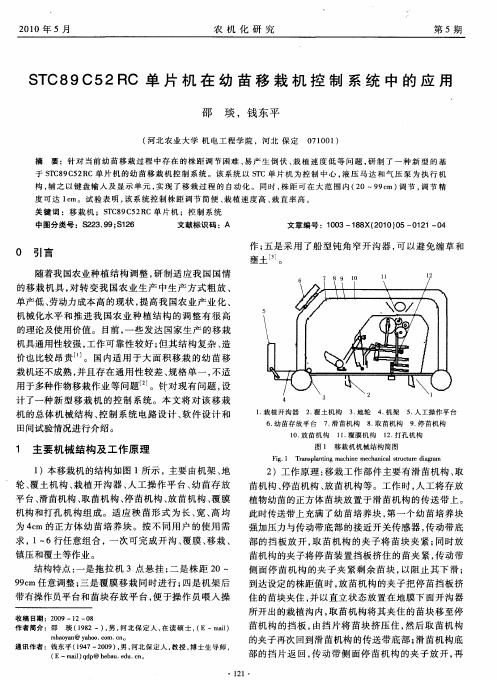
1 硬件设计本控制系统由单片机模块、空气温度监测模块、土壤湿度监测模块、光照强度监测模块、CO₂监测模块、通信模块、驱动模块和显示与控制模块共8个模块组成,其系统框图如图1所示。
1.1 单片机模块单片机选用STM32F103,STM32F103微控制器具有高性能、丰富的外设和接口、灵活的存储容量选择、低功耗特性以及安全功能等特点。
功能较为完善,可以满足此次设计需要。
1.2 空气温度监测模块DS18B20 是一种“单总线”接口的温度传感器。
DS18B20通过测量温度对其内部器件电阻值,从而实现温度的检测。
DS18B20内置有一个温度感应器和一个处理模块,当温度发生变化时,感应器的电阻值也会发生变化,这个变化被传递给处理模块,经过一系列运算之后最终以数字信号的形式输出。
整个过程由芯片内部自动完成,当系统需要获取传感器的数据时,需要从信号引脚DQ输入特定的指令,传感器会对指令进行解析,并向DQ引脚输出相应的温度数值。
1.3 土壤湿度监测模块采用YL-69土壤湿度传感器,其原理为湿敏电容,当环境的湿度发生改变时,会使得湿敏电容存在环境中的介质发生改变,导致湿敏电容中的电容数值产生变化,电容的数值正比于湿度值。

基于单片机的植物生长环境智能控制系统植物是地球上最基本的生物种群之一,它们为我们提供了氧气、食物和美丽的景观。
然而,不同植物对生长环境的需求并不相同,为了确保植物可以健康地成长,我们需要对其生长环境进行监控和调控。
在这种背景下,基于单片机的植物生长环境智能控制系统应运而生。
一、概述基于单片机的植物生长环境智能控制系统是一种能够实时检测植物生长环境并自动控制关键参数的技术系统。
通过植物生长环境的智能监测和精确控制,该系统能够提供适宜的光照、温度、湿度和营养物质等条件,从而最大限度地促进植物的生长发育。
二、系统组成基于单片机的植物生长环境智能控制系统主要由以下组件组成:1. 传感器:该系统配备了多种传感器,用于实时监测植物生长环境的各种参数。
例如,光敏传感器用于检测光照强度,温度传感器用于监测温度变化,湿度传感器用于测量空气湿度等。
2. 单片机:作为系统的核心控制单元,单片机负责接收传感器采集到的数据,并根据预设的控制算法进行判断和处理。
通过单片机的智能控制,可对环境条件进行实时调整。
3. 执行器:执行器是系统的输出部件,用于调整植物生长环境的关键参数。
例如,电磁阀用于控制水分的供给,风扇用于调节空气循环,LED灯用于提供适宜的光照等。
4. 用户界面:系统还配备了用户界面,用户可以通过该界面实时查看植物生长环境的各种参数,并进行手动或自动的调控操作。
用户界面通常采用液晶显示屏或者手机应用程序实现。
三、系统工作原理基于单片机的植物生长环境智能控制系统的工作原理如下:1. 数据采集:系统中的传感器实时采集植物生长环境的各项数据,包括光照、温度、湿度等。
2. 数据处理:单片机接收传感器采集到的数据,并进行预设的控制算法分析和处理。
根据植物的生长特性和环境需求,单片机判断当前环境是否符合要求,并生成相应的控制信号。
3. 控制执行:通过执行器,系统根据单片机生成的控制信号,实现对植物生长环境的自动调控。
例如,如果湿度过低,系统会控制电磁阀开启水源,补充水分;如果温度过高,系统会启动风扇,增加空气流通等。
104农机使用与维修2019年第8期基于单片机的无土栽培智能控制系统设计杨晓晨,吴其(沈阳工学院信息与控制学院,辽宁抚顺113122)摘要:以STC89C52单片机为控制中心,系统采用LCD12864作为可视化模块,同时配有A/D转换模块、继电器模块以及nrf905无线传输模块组成。
通过系统控制继电器对环境进行控制,调节湿度温度等信息,进行无土栽培控制。
关键词:STC89C51单片机;nr®5传输模块;无土栽培中图分类号:S668文献标识码:A doi:10.14031/ki.njwx.2019.08.067发展农业现代化离不开电子技术的快速发展,农业生产正在向着机械化、智能化、遥控化方向发展,利用电子技术增加产量的同时减少成本,如今可用单片机及各类检测模块更加精准地进行检测分析,使我国的农业技术得到快速的发展。
1系统概述本文所介绍的是一款可以采集空气温度、湿度、光照以及培养液PH值的智能系统,同时通过无线传输模式将检测信息传输给控制中心,通过LCD12864显示屏进行信息显示。
系统所涉及的是STC89C52单片机作为最小系统,同时配有传感器的信号采集模块、A/D转换模块、LCD 显示模块、继电器模块以及无线传输模块。
1.1系统功能设计通过nrf905进行无线传输,将检测的空气温湿度、光照和培养液浓度传输给LCD12864液晶显示屏中。
通过按键模块进行远程控制,对继电器进行远程控制,当检测的浓度低于设定值,系统分析需要浇水时,通过继电器控制水阀运转进行浇水。
系统可以通过远端的PC 机上的组态软件对继电器进行控制,实现可以远程控制功能。
1.2系统的组成本文的设计系统主要由单片机的最小系统和传感器模块、信息采集及数据转换模块、液晶显示模块、继电器模块和nr®05无线传输模块组成。
单片机最小系统选用的是STC89C52单片机,传感器模块选用的是温湿度传感器,信号采集电路选择的是DS18B20温度测量电路,并使用ADC0831在湿敏电阻上执行模数转换,并对光敏电阻进行模数转换⑴。
摘要在中国工业韧带发展中,很多高生产率高精度的机械加工设备从国外引进,大大的提高了工作速度,产品的加工精度,降低了工作的劳动强度,所以大受欢迎。
机械手是一种模仿人体上肢运动的机器,它能按照预定要求输送工种或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
因而具有强大的生命力,受到人们的广泛重视和欢迎。
工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,提高劳动生产率和自动化水平。
工业生产中经常出现的笨重工件的搬运和长期频繁,单调的操作,如果没有机械手那么工人的劳动强度是很高的,有时候还要用行车员工件,生产速度大大延缓,这种情况采用机械手是很有效的。
此外,它能在高温、低温、深水、宇宙、反射性和其他有毒、有污染环境条件上进行操作。
更显其优越性,有着广阔的发展前途。
单片机技术作为计算机技术的一个重要的分支,广泛应用于工业控制、智能化仪器,家用电器,甚至电子玩具等各个领域,它具有体积小、功能多、价格低廉、使用方便、系统设计灵活等优点。
本论文设计以STC89S52单片机为中心,运用c语言和汇编语言的方式,控制机械手来完成模拟智能物料搬运装置。
关键词:机械手,自动化,单片机I目录摘要 (I)目录 (II)第一章单片机与机械手的概况 (1)1.1 工业机械手的简史 (1)1.2 工业机械手在生产中的应用 (1)1.3 机械手的组成 (2)1.4 工业机械手的发展趋势 (3)1.5单片机的简史 (3)1.6单片机的应用领域 (4)1.7单片机开发系统的组成 (5)1.8单片机的发展趋势 (5)第二章模拟智能物料搬运装置实训 (6)2.1设计内容 (6)2.2设计模块 (7)2.3设计过程 (7)2.4参考例程 (8)2.5 单片机装置安装与调试的注意事项 (21)第三章结论 (22)参考文献 (23)致谢 (24)II第一章单片机与机械手的概况1.1 工业机械手的简史用于再现人手的的功能的技术装置称为机械手。
存档号: 144113215学号:5铁路职业技术学院毕业设计基于单片机的搬运机器人系统的设计与制作系部电气工程系专业名称电气自动化技术指导教师史振江学生罗本坡二〇一四年一月铁路职业技术学院信息工程系2014级毕业设计(论文)总任务书电路基础教研室2013年12月1日铁路职业技术学院信息工程系2011级毕业设计(论文)分任务书(软件部分)电路基础教研室2013年12月1日摘要本论文利用单片机设计了自动搬运小车系统,实现了小车自动搬运货物功能。
系统由单片机主控模块、电机驱动模块、电子罗盘模块、无线串口通讯模块、码盘测速模块五部分电路组成。
利用单片机接收电子罗盘采集的数据,实现小车对方向的采集。
上位机通过无线串口向小车发送指令,控制小车的工作。
同时,小车通过码盘对行驶距离进行测量,并将行驶坐标返回。
此系统具有自动化程度高、控制简单、适应性强等特点。
关键词:电子罗盘;PWM脉宽调制;码盘测速;串口通信目录前言1第1章总体设计11.1总体框图11.2软、硬件功能划分2第2章系统原理图与引脚分配32.1总体电路图32.2单片机引脚分配4第3章系统软件设计43.1流程图43.1.1 主程序流程图43.1.2 INT0外部中断服务子程序流程图53.1.3 定时器1中断服务子程序流程图63.1.4 串口1中断服务子程序流程图63.2部分源程序7第4章系统调试94.1K EIL C51系统调试界面和程序调试94.1.1 HMC5983电子罗盘模块的校准94.2模块的单独调试与联调114.2.1 串口通信114.2.2 电子罗盘采集数据并显示124.2.3 电机驱动模块PWM输出144.3自动搬运小车与上位机的联合调试154.3.1 VB上位机部分154.3.2 自动搬运小车整体调试与上位机监控16 第5章毕业设计总结18致18参考文献18前言随着传感技术的迅速发展以与工业自动化程度的提高,越来越多的工厂正在走向自动化生产,而以往的传送带、电动货梯已不能满足工厂对零散货物的搬运需求。
2018年第04期学术专业人文茶趣对物料搬运的控制系统进行改良是本文讨论的重点。
智能控制系统的特点是自动化程度高、系统更加安全可靠、信号的传输快捷等,这可以应用在茶叶物料的搬运方面,发挥出控制搬运流程、提高搬运工作效率等作用。
单片机可以改良茶叶物料搬运的智能控制系统,改良后的系统工作更加稳定、安全、可靠,并且提高茶叶物料搬运效率。
虽然我国电子技术发展以趋于成熟,但是对单片机的利用并不十分突出。
因此,单片机应用在茶叶物料搬运系统中,突破了我国茶叶物料搬运智能技术瓶颈,是一次技术上的创新尝试。
1单片机控制与技术1.1单片机技术单片机技术在我国的起步较晚,约为上个世纪八十年代末期。
现如今,单片机技术的发展经历了四个重要阶段。
虽然起步晚,但是我国单片机技术的发展速度很快。
单片机是由四个部分组成,分为ROM 、CPU 、RAM 、I/O 四个组成部分。
起初,我国的单片机完全依靠进口,随后我国科学家集中精力、花费了大量心血自主研发了主体单片机、单片机I/O 等。
另外,单片机使用过程中的低电压、低功耗的特点,可以满足大部分工业需求,且单片机使用的寿命较长,在使用过程中的运行速度呈指数增长,运行过程中的可靠性高。
因此,在此基础上单片机获得了超大规模的应用。
单片机技术还可以应用在控制系统中,采用指令数据存储与读取的方式,实现指令对于整个控制系统的控制。
目前,市面上所使用的单片机大多为三核结构,此种单片机系统将DSP 与微控制器合并至同一个单片机中,大大减小了单片机的体积。
1.2单片机控制系统单片机的控制系统是单片机的主导系统,依照结构形式对此系统进行分类,可以分为两种不同的控制系统。
即,哈佛控制系统与普林斯顿控制系统。
这两种不同的系统主要区别:程序指令储存器与单片机控制系统中的数据存储是否在统一的结构里。
第一类,控制系统为哈佛控制系统,该控制系统是将程序指令与单片机的数据存储,可以放置于分别的存储系统中。
因此,这种方式有利于保护数据的安全性,但是也有其不利之处。