- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§ 6.2 三,旋转变压器
位移和速度检测装置
旋转变压器结构示意图 转子轴, 外壳, 分解器定子 分解器定子, 分解器定子绕组, 1—转子轴, 2—外壳,3—分解器定子, 4—分解器定子绕组, 转子轴 分解器定子绕组 变压器一次线圈, 变压器转子, 分解器转子绕组, 5—变压器一次线圈, 6—变压器转子,7—分解器转子绕组, 变压器一次线圈 变压器转子 分解器转子绕组 分解器转子, 变压器二次线圈, 8—分解器转子,9—变压器二次线圈, 10—定子线轴 分解器转子 变压器二次线圈 定子线轴
U = kU s sin θ 机 + kU c cos θ 机 = kU m cos(θ 电 θ 机) ωt sin
不断修改激磁调幅电压幅值的电气角θ 使之跟踪θ 的变化, 不断修改激磁调幅电压幅值的电气角 电,使之跟踪 机的变化,并测量 感应电压幅值即可求得机械角位移θ 感应电压幅值即可求得机械角位移 机 .
按 输 出 信 号 性 质 分
§ 6.1
传感器的功能及分类 按工作原理不同分
检测技术概述
物理型传感器:利用一些材料物理特性变化(如集成传感器),有潜力 结构型传感器:利用弹性片,金属片,电容电感等结构元件(如一 般的电阻,电容,电感传感器) 传感器的选用 传感器千差万别,测量同一种测定量,可以采用不同工作原理的传感器, 注意以下几个方面: 测量条件 测量的目的;测定量的选定;测量的范围;输入信号的带宽;要求的精 度;测量所需时间等 传感器的性能
U = kU s sin θ 机 + kU c cos θ 机 = kU m cos(ωt θ 机)
因此,只要检测出转子输出电压的相位角,就知道了转子的转角 因此,只要检测出转子输出电压的相位角,就知道了转子的转角θ机 .
鉴幅方式
给定子的两个绕组分别通上频率, 给定子的两个绕组分别通上频率,相位相同但幅值不同的激磁电 压 U s = U m sin θ电 sin ωt , U c = U m cosθ电 sin ωt 则在转子绕组上得到感应电压为
U 即: ′ = kU s sin θ 机 或
U ′ = kU c cos θ 机
其中, 为定子正弦,余弦绕组上的激磁电压, 为变压比. 其中,Us ,Uc 为定子正弦,余弦绕组上的激磁电压,k为变压比.
§ 6.2
位移和速度检测装置
旋转变压器的应用 鉴相方式
在旋转变压器定子的两相正交绕组上分别加上幅值相等, 在旋转变压器定子的两相正交绕组上分别加上幅值相等,频率相同的 正弦, 正弦,余弦激磁电压 U s = U m sin ωt, U c = U m cos ωt 转子旋转后, 转子旋转后,两个激磁电压在转子绕组中产生的感应电压线性叠加得 总感应电压为: 总感应电压为:
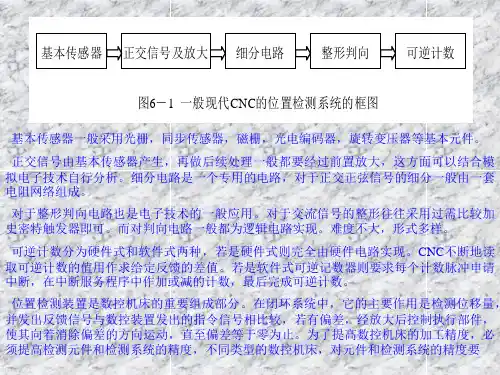
检测系统组成原理如下图:
§ 6.1
检测技术概述
显示器
非电量
传感器
电量
信号处 U0(I0 ,f) 理电路
数据处 理装置 执行 机构
传感器的作用:用于检测各种物理量(如位移,速度,角度,力,力矩 传感器的作用:用于检测各种物理量(如位移,速度,角度,力,力矩 压力,温度等),并转化为电量信号(如电压,电流,电容,电感)输 出; 信号处理电路的作用:将传感器输出的电量变成具有一定功率的电压, 信号处理电路的作用:将传感器输出的电量变成具有一定功率的电压, 电流或频率信号,以推动后级的显示电路,数据处理电路等; 数据处理装置:用来对测量结果处理,计算,分析,数据处理信号通常 数据处理装置:用来对测量结果处理,计算,分析,数据处理信号通常 送到执行机构或显示器中去,以控制被控对象及显示处理的各种数据.
§ 6.1
传感器的功能及分类
检测技术概述
二,检测系统的传感器
传感器(sensor sensor)也叫变换器(transducer transducer),换能器,探测器,其输出 sensor transducer 的信号有不同的形式:电压,电流,频率,脉冲 电压,电流,频率,脉冲等,以满足信息的传输 ,处理,记录,显示,控制等要求. 敏感作用(被测对象 信号拾取) 两个功能: 变换作用(被测非电量 电量输出) 分类
§ 6.1
检测技术概述
精度;响应速度;稳定性;模拟还是数字信号;输出量及电平;被测对 象特征的影响;校准周期;过载输入保护等 传感器的使用条件 放置的场所;环境(温度,湿度,振动);测量的时间(寿命周期); 传输距离;与设备连接方式;供电电源;价格
三,模拟式和数字式传感器检测系统
模拟式检测系统 电阻,电容,电感,压电,磁电,热电式等传感器输出模拟信号,其检 测系统如图示:
三,模拟式和数字式检测系统比较
§ 6.1
检测技术概述
模拟式系统:精度低,易受干扰影响,不便于长距离传输,有A/D转换, 成本高 数字式系统:分辨率高,抗干扰强,易于长距离传输,易于计算机控制, 应用广泛)
§ 6.2
位移和速度检测装置
在机电一体化系统中位移和速度检测装置使用非常广泛,下面主要 介绍这两类检测传感器
§ 6.2 1.激光的特点
位移和速度检测装置
四,激光测量系统
激光的谱线宽度很窄,比普通光源提高了几万倍, 高单色性 激光的谱线宽度很窄,比普通光源提高了几万倍, 是最好的单色光 是最好的单色光源. 激光是向特定方向发射的,它的发散角很小, 高平行度 激光是向特定方向发射的,它的发散角很小,已达 到几分,甚至可小到1 到几分,甚至可小到1秒. 高亮度 激光的光能高度集中,亮度特别高,一台红宝石激 激光的光能高度集中,亮度特别高, 光束的亮度比太阳表面亮度亮 200 亿倍 . 高相干性 相干性是相干光波在叠加区产生稳定的干涉条纹 所表现的性质,可用时间相干性和空间相干性来描述. 相干性来描述 所表现的性质,可用时间相干性和空间相干性来描述.时间相 干性是指光源在不同时刻发出的光束的相干性, 干性是指光源在不同时刻发出的光束的相干性,激光的相干长 度可达几十公里, 比普通光源提高了几十万倍.空间相干性是 度可达几十公里, 比普通光源提高了几十万倍 指同一时间内由光源不同部位发出的光波的相干性, 指同一时间内由光源不同部位发出的光波的相干性,激光在任何 传播方向上都具有良好的空间相干性. 传播方向上都具有良好的空间相干性.
第六章 检测系统技术 § 6.1 检测技术概述
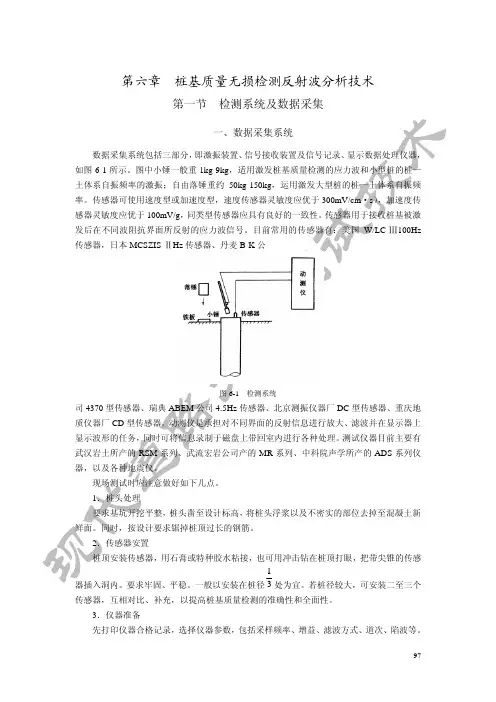
一,作用及其组成
是机电一体化系统的一个重要组成部分,将机电一体化系统自身的,作 业对象的,作业环境的工作状态参数进行检测,并将检测到的状态参数 从物理变化量变为电信号,提供给信息处理及控制系统,以有效的控制 机电一体化系统执行机构的动作.
机电一体化一体化系统检测系统实质: 非电量 电量 显示
输出信号的作用及其处理 A,B 两相的作用: 两相的作用: 细分处理,角位移,转速,转向
Z 相的作用
周向定位基准,圈数
, ,Z 的作用
利用 A , 等差分输入消除远 距离传输的共模干扰
常用的脉冲编码器每转输出的脉 冲数有: 冲数有: p/r, p/r, p/r, 2000 p/r,2500 p/r,3000 p/r, 高分辨率的脉冲编码器 20000 p/r, p/r, p/r. p/r,25000 p/r,30000 p/r.
§ 6.2
位移和速度检测装置
2.激光干涉仪原理 2.激光干涉仪原理
(1)迈克尔逊干涉仪结构
v
M1
迈克尔逊干涉仪 由四个光学元件(两块平板玻璃P 和两块平面反射镜M 由四个光学元件(两块平板玻璃P1 P2和两块平面反射镜M1 M2)和一个 精密的移动机构组成. 精密的移动机构组成.
§ 6.2
位移和速度检测装置
§ 6.2 二,光栅
位移和速度检测装置
光栅检测装置基本结构示意图 1—光源, 2—透镜, 3—指示光栅, 4—光电元件, 5—驱动电路,6—标 尺光栅 光栅检测装置的结构
§ 6.2 光栅分类
位移和速度检测装置
长光栅 玻璃光栅 按制造光栅材料 金属光栅
按检测位移性质
圆光栅 透射光栅 反射光栅
按光源照射方法
一,光电编码器
工作原理 光电码盘随被测轴一 起转动,在光号转换成 电信号a,b,z,通 过信号处理装置的整 形,放大等处理后输 出如图所示的6项A, B,Z 和取反信号. 光电脉冲编码器的结构
§ 6.2
位移和速度检测装置
透射光栅
优点:1)光源垂直入射,信号幅值比较大,信噪比好,光电转换器(光栅读数头)
的结构简单;2)光栅每毫米的线纹数多,减轻了电子线路的负担 .
缺点:玻璃易破裂,热胀系数与机床金属部件不一致,影响测量精度.
透射光栅尺的长度一般都在1~2m,常见的线纹密度为每毫米4,10,25,50,100, 200,250线. 反射光栅
§ 6.2 旋转变压器原理
位移和速度检测装置
θ
分解器绕组的结构保证了定子与转子之间的气隙磁通呈正, 分解器绕组的结构保证了定子与转子之间的气隙磁通呈正,余弦规 律分布.防止气隙磁通畸变加上相互垂直的绕组,因此, 律分布.防止气隙磁通畸变加上相互垂直的绕组,因此,当转子旋 转时, 呈正弦规律变化. 转时,转子绕组内产生感应电势随转子偏转角θ机呈正弦规律变化.
§ 6.2
位移和速度检测装置
莫尔条纹的特点: 莫尔条纹的特点: 放大作用; 放大作用; 使栅距的节距误差平均化; 使栅距的节距误差平均化; 根据莫尔条纹的移动方向可以辨别光栅的移动方向
细莫尔条纹干涉原理
是由光线通过线纹衍射后产生的 干涉结果 ,平面的光波照射到 板上,通过衍射分成1, , 扫描 板上,通过衍射分成 ,0, -1光波,它们在相位栅标尺上被 光波, 光波 衍射,光强的大部分反射在1, 衍射,光强的大部分反射在 , 衍射级次中. 和-1衍射级次中.这些光波在扫 衍射级次中 描掩膜光栅上再次相遇, 描掩膜光栅上再次相遇,重新衍 射和干涉,此时,主要生成2个 射和干涉,此时,主要生成 个 序列波, 序列波,它们以不同的角度离开 扫描掩膜. 扫描掩膜.光电元件将这些光强 转变成电信号. 转变成电信号.