双基雷达成像
- 格式:docx
- 大小:686.44 KB
- 文档页数:20
双基地雷达,不说你也知道的特性!我们知道发射机和接收机共用一副天线的传统雷达称为单基地雷达或单站雷达(Monostatic Radar)。
那么,今天我们就来讲讲那些不说你也知道的双基地雷达的特性。
1双基地雷达的概念理解接收机和发射机在不同位置的雷达称为双基地雷达(Bistatic Radar)。
虽然这样的结构带来了一些技术上的难题,特别是发射机和接收机之间的同步问题,还可能增加成本,但它存在一些潜在优势。
隐身目标会将单站雷达发射的能量散射到各个方向,而双基地雷达能够提高对隐身目标的检测能力。
双基地雷达的接收机是被动式的,这就意味着接收机不会被电子支援措施所定位。
很难针对双基地雷达接收机部署对抗措施,因为它们的位置的未知的。
因此,任何干扰都必须在一个角度范围内传播,削弱其有效性。
同样,双基地接收机不易受到反辐射导弹(ARMs)的攻击。
双基地雷达体制是十分有用的,尤其是在无人机系统(UAVs)中,因为无人机可以只携带接收机,而重型、复杂、高功耗的发射机可以位于别处。
20世纪30年代最早的机载雷达试验就是双基地的,因为在最初的机载雷达系统中不可能产生高功率的雷达脉冲。
从70年代后期到80年代初期双基地雷达系统的一个典型例子是“Sanctuary”,它是一个美国双基地防空雷达研制计划,它在防区外使用机载照明雷达,接收机为地面被动接收器。
2双基地雷达的特性由发射机、目标和接收机形成的三角形如下图所示。
接收机和发射机之间的距离称为基线(baseline)。
目标与发射机和接收机连线的夹角称为双基地角或分置角(bistatic angle)。
在大多数情况下,双基地接收机测量来自发射机的直接脉冲和目标回波脉冲之间的延时,如果L已知,将可以得出双基地距离和。
这样的测量方法定义了一个椭圆,发射机和接收机分别是两个焦点。
这就和你小时候玩的把戏是一样的:把两个大头针钉在木板上,然后用绳子和铅笔画出一个椭圆。
通常,发射机或接收机(或两者)使用定向波束来指向椭圆上的目标。

第46卷 第4期2024年4月系统工程与电子技术SystemsEngineeringandElectronicsVol.46 No.4April2024文章编号:1001 506X(2024)04 1193 11 网址:www.sys ele.com收稿日期:20220830;修回日期:20221116;网络优先出版日期:20221207。
网络优先出版地址:http:∥kns.cnki.net/kcms/detail/11.2422.TN.20221207.1448.002.html 通讯作者.引用格式:李亮,黄洋,金光虎,等.双基地宽带成像雷达时间及调频率同步方法[J].系统工程与电子技术,2024,46(4):1193 1203.犚犲犳犲狉犲狀犮犲犳狅狉犿犪狋:LIL,HUANGY,JINGH,etal.Timeandchirpratesynchronizationmethodofbistaticwidebandimagingradar[J].SystemsEngineeringandElectronics,2024,46(4):1193 1203.双基地宽带成像雷达时间及调频率同步方法李 亮,黄 洋 ,金光虎,董 臻,何 峰,邹慕兰(国防科技大学电子科学学院,湖南长沙410073) 摘 要:双基地宽带成像雷达由于不同源会产生时间同步误差和调频率同步误差。
针对这一问题,面向低成本、小型化雷达接收机设计同步方法。
针对时间同步问题,提出了直达波触发的收发脉宽非一致时间同步方案,通过使用直达波触发接收窗启用时刻,同时增加接收窗长度和低通匹配滤波,以完成时间同步。
针对调频率同步问题,提出了采用吕氏分布对调频率误差进行估计,进而进行补偿,以完成调频率同步。
该时间及调频率同步方法基本不需要增加接收机硬件成本,可以适应小型化接收雷达需求。
基于小型宽带雷达搭建室内的双基宽带雷达模型,实验实现了双基雷达同步以及数据采集、成像。

茶话双基地雷达姓名:刘玉敬 学号:20090812211.双基地雷达定义双基地雷达采用两个相距颇远的基地,其中一个放置发射机,另一个放置相应的接收机。
其目标检测与单基地雷达类似,即发射机照射目标、接收机检测和处理目标回波。
目标定位也与单基地雷达类似,但更复杂:为求解发射机-目标-接收机三角形(双基地三角形),需要信号传播总时间、接收机的正交角测量及对发射机位置的一些估计。
由于站址分开,因此可能再加上副瓣对消,对直达路径发射信号提供足够的空间隔离度。
双基地雷达常采用CW 波形。
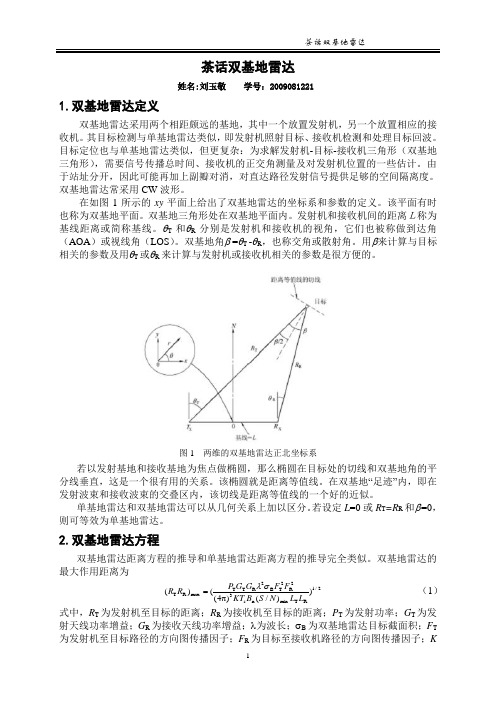
在如图1所示的xy 平面上给出了双基地雷达的坐标系和参数的定义。
该平面有时也称为双基地平面。
双基地三角形处在双基地平面内。
发射机和接收机间的距离L称为基线距离或简称基线。
θT 和θR 分别是发射机和接收机的视角,它们也被称做到达角(AOA )或视线角(LOS )。
双基地角β =θT -θR ,也称交角或散射角。
用β来计算与目标相关的参数及用θT 或θR 来计算与发射机或接收机相关的参数是很方便的。
图1 两维的双基地雷达正北坐标系若以发射基地和接收基地为焦点做椭圆,那么椭圆在目标处的切线和双基地角的平分线垂直,这是一个很有用的关系。
该椭圆就是距离等值线。
在双基地“足迹”内,即在发射波束和接收波束的交叠区内,该切线是距离等值线的一个好的近似。
单基地雷达和双基地雷达可以从几何关系上加以区分。
若设定L =0或R T =R R 和β =0,则可等效为单基地雷达。
2.双基地雷达方程双基地雷达距离方程的推导和单基地雷达距离方程的推导完全类似。
双基地雷达的最大作用距离为2/1RT m i n n s 32R 2T B 2R T T m a x R T ))/()4(()(L L N S B KT F F G G P R R π=σλ (1) 式中,R T 为发射机至目标的距离;R R 为接收机至目标的距离;P T 为发射功率;G T 为发射天线功率增益;G R 为接收天线功率增益;λ为波长;σB 为双基地雷达目标截面积;F T 为发射机至目标路径的方向图传播因子;F R 为目标至接收机路径的方向图传播因子;K为玻耳兹曼常数;T s 为接收系统噪声温度;B n 为接收机检波前的滤波器噪声带宽;(S /N )min 为检波所需的信噪功率比;L T 为不含在其他参数在内的发射系统损耗(>1);L R 为不含在其他参数在内的接收系统损耗(>1)。
机载平行等速双基SAR的极坐标格式成像算法摘要:平行等速双基sar是指收发平台速度大小和方向均相同的双基sar系统,该构型具有广阔的应用前景。
在此将传统适用于单基地sar成像的极坐标格式算法(pfa)加以改进,使之适用于平行等速双基sar成像处理。
由于收发异置,回波信号在接收平面和发射平面的斜距几何关系比较复杂。
为了便于后续的二维插值操作,用一个新的几何模型来描述收发平面上斜距的关系。
该算法具有传统pfa算法的操作简单,易于实现的特点。
最后通过仿真数据的成像处理对该方法进行了验证。
关键词:双基合成孔径雷达;极坐标格式算法;成像算法;几何模型引言双基sar在地物分类和识别、干涉测高、高分辨宽域成像等方面有着广阔的应用前景。
与单基地sar相比,双基地sar的主要优点有:作用距离更远,获取信息更丰富,机动性和隐蔽性更高,抗干扰和抗截获性能更好。
关于双基sar系统的研究,在文献[13]中都有所讨论。
在各种构型的双基sar中,接收机和发射机平台速度大小相同,方向平行的双基sar(平行等速双基sar)具有方位不变性,适合大面积连续成像,许多文献讨论过这种构型的双基sar 成像方法。
时域逐点匹配方法可以用于任意一类的双基sar,该方法是理论上最优的,但缺点是运算量效率很低,文献[4]对该方法进行了研究;loffeld用傅里叶变换将回波数据从慢时间域变到多普勒域时,把收、发斜距分别在各自的驻相点处做二阶泰勒近似,然后对二阶近似式用驻相点法求出其多普勒域表达式[5]。
此算法可以得到任意构型下双基二维频域表达式,但其主要缺点是其精度不高,对精确成像不利。
基于这个频谱,文献[68]提出了改进的双基sar成像算法。
neo把回波的相位历程在慢时间进行高阶泰勒级数展开,然后通过使用级数反演法求出信号二维频域的近似表达式[9]。
在该方法的基础上,wong和neo分别提出了改进的非线性csa算法[10]和改进的距离多普勒算法[11]。
第46卷 第1期2024年1月系统工程与电子技术SystemsEngineeringandElectronicsVol.46 No.1January 2024文章编号:1001 506X(2024)01 0121 09 网址:www.sys ele.com收稿日期:20220324;修回日期:20220622;网络优先出版日期:20220711。
网络优先出版地址:https:∥kns.cnki.net/kcms/detail/11.2422.TN.20220711.1442.004.html基金项目:国家自然科学基金(61772397)资助课题 通讯作者.引用格式:陈洋,肖国尧,全英汇,等.基于多核DSP的星载双基FMCWSAR成像算法实现[J].系统工程与电子技术,2024,46(1):121 129.犚犲犳犲狉犲狀犮犲犳狅狉犿犪狋:CHENY,XIAOGY,QUANYH,etal.ImplementationofspacebornebistaticFMCWSARimagingalgorithmbasedonmulti coreDSP[J].SystemsEngineeringandElectronics,2024,46(1):121 129.基于多核犇犛犘的星载双基犉犕犆犠犛犃犚成像算法实现陈 洋1,肖国尧1, ,全英汇1,任爱锋1,别博文1,邢孟道2(1.西安电子科技大学电子工程学院,陕西西安710071;2.西安电子科技大学前沿交叉研究院,陕西西安710071) 摘 要:调频连续波(frequencymodulatedcontinuouswave,FMCW)合成孔径雷达(syntheticapertureradar,SAR)降低了传感器的峰值传输功率,使系统的重量和成本最小化,被广泛应用于机载平台。
将双基地构型与FMCW技术相结合,应用于星载平台,即构成星载双基地FMCWSAR。
本文对距离多普勒(range Doppler,RD)算法进行改进,建立起一种高性能的适宜星载双基地平台的FMCWSAR成像频域算法,这种算法的处理精度明显提高,成像效果更好。
基于STAP的双基雷达运动目标检测技术研究一、空时自适应处理在机载雷达中,由于载机平台的运动,处于不同波束角度的反射体的回波包含不同的多普勒频移,杂波回波的多普勒频谱宽度决定于雷达平台速度、天线波束方向及宽度。
传统的杂波消除手段将多普勒频率作为区分目标和杂波的唯一标准,并通过直接滤除多普勒频谱中杂波回波占据的频带而实现杂波消除。
而雷达运动引起的杂波频谱展宽,使得杂波可能与运动目标的频谱重叠,在滤除杂波的同时会将目标也滤除了。
空时自适应处理(STAP)是非常有效的杂波消除和运动目标检测手段。
STAP将杂波回波看做在方位角度(空间)和多普勒频率(时间)平面上的二维分布的信号,它能根据杂波回波在空时平面的分布,自适应地调整二维空时滤波器响应,补偿平台运动引起的多普勒频谱展宽,最大限度地自适应杂波,并在空时平面内留下充足的自由空间用于运动目标检测。
1、空时信号模型空间维:图1为机载阵列雷达的空间几何关系图。
不失一般性,可假设雷达平台向沿x轴方向运动,并假设z轴方向为0。
方位方向。
图中口为高度角,R s为斜距,R g为地距,φ为方位角,v p为平台速度。
图1 机载阵列天线的几何关系先忽略平台运动造成的影响,来考察相对于阵列中心O的坐标为x i、y i和z i的某一传感器。
该传感器接收到来自地面某一散射体的信号,它相对于阵列中心的相位移动为(1)其中N为阵列元素的个数。
接收信号经过解调和匹配滤波后应为(2)其中θ=arcsin(H/R s),且A r=squar(2P r), P r为接收功率,它与发射机功率、双程传播特性和散射体反射特性等雷达距离方程因子有关。
为了方便仿真,可以用下式来表示传感器方向图(3)(4)其中,角度φ0和θ0表示传感器方向图的峰值方向。
对于前视阵列水平视角φ0 = 0。
,对于侧视阵列φ0 =90。
而对于垂直方向的视角,可始终使φ0 = 0。
时间维:在脉冲多普勒雷达系统中,多普勒频率是通过观测发射机发射的相干脉冲串回波信号问相位差异而获得的。
基于二维驻定相位原理利用单基成像算法来处理方位空变双基SAR数据摘要:这篇论文提出一个新的双基点目标参考频谱。
它是由最早应用于合成孔径雷达领域内的二维驻定相位原理派生而来的。
频谱包含两个双曲距离方位耦合项,这与单基频谱十分相似。
它除了多出一个方位缩放项外其它特点与一般单基合成孔径雷达相同。
因此,常规以多普勒为基础的单基处理算法适合处理在两个移动平台上中度斜视方向空变系统的双基合成孔径雷达(BiSAR)数据。
基于频谱,两个基于多普勒的单基成像算法[即距离-多普勒算法(RDA)和线频调变标算法(CSA)]易于实现对中度斜视方向平移可变BiSAR数据的处理。
与单基SAR处理过程相比,BiSAR的RDA和CSA只需要对多普勒参数进行调整。
本文在最后,分析频谱的潜力和局限,用星载/机载结构中的真实原始数据来验证提出的频谱和处理方法。
关键词:驻定相位原理,RDA,CSA,BiSAR数据处理,1 引言双基合成孔径雷达的特点是发射机与接收机在不同位置,从而在BiSAR有很大的能量、可靠性和灵活性。
相对于单基系统而言双基系统也有其它好处,像频繁检测、减少漏洞、可使用一个已存在的雷达卫星来降低成本,有向前向后观测SAR成像能力、能够高分辨率宽测绘成像。
对于BiSAR聚焦,时域算法可以很好的应用于任意飞行轨迹不存在近似误差。
但是,在时域聚焦十分的费时。
在频域中处理可以大大提高处理效率。
在频域算法中双基点目标参考频谱(BPTRS)是一个非常重要的基础。
在近期文献[1]和[5]—[16]中可以找到对近似BPTRS和双基成像方法的阐述。
在文献[5]中,倾斜时差校正预处理技术被用于将一个方位平移不变双基结构改造成一个等效单基结构。
许多方法也被用于衍生BPTRS,,双基欧米茄-K算法利用双平方根(DSR)相位项数值解可用于聚焦BiSAR数据。
在文献[6]中,仅处理方位平移不变双基结构,而在[7]中提出的方法还可以处理方位空变的例子。
在文献[8]中,极坐标形式算法被提议用来处理BiSAR 数据。
此外,文献[9]中发表了一个BiSAR的数据传递函数,文中一个可以用一个标准SAR处理器来处理准平稳系统BiSAR数据,在文献[10]中建议用距离多普勒算法(RDA)和扩展线调频调变标算法(CSA)处理方位平移不变BiSAR数据。
在Loffeld双基公式基础上,可用二维变尺度逆傅里叶变换(FT)(ISFT)和CSA聚焦BiSAR数据。
最近,Loffeld方法被更进一步扩展用于处理星载/机载混合双基系统。
但是,补偿双基形变项需要块操作并且不能工作在中度斜视或大斜视情况下。
BPTRS 在特殊情况下衍生应用连续回归法。
这种频谱显示了一般双基系统的良好的聚焦性能。
现在算法中的绝大多数有一些局限:没有效率或者不能处理方位空变双基情况(例如,[5],[6],[9],[10],[12]和[15])。
利用一般单基SAR处理算法(例如RDA,CSA和欧米茄-K算法)来处理方位空变双基系统,BPTRS是一个重要的基础。
不同于单基点目标参考频谱很容易得出,在双基情况下运用驻定相位法将更加复杂。
由于发射机和接收机距离曲线的重叠,我们将得到两个不同的双曲距离方程的和,被表示为DSR项并且双基距离曲线是顶部平坦双曲线。
DSR在地球物理中也得到很好的研究[17][18]。
为了规避DSR的限制,我们在二维频域中运用二维驻定相位原理(2DPSP)来达到时域和多普勒频域间近似一对一的对应。
运用它,可以得出一个精确地BPTRS。
它包含两个双曲距离方位耦合项,耦合项线性与两个平台的零多普勒斜距有线性关系,然而单基SAR频谱只有一个双曲耦合项。
BPTRS这种形式类似于单基频谱,这有助于单基处理算法的应用。
在这篇文章中,我们将讲述单基处理算法的两个应用,RDA和CSA。
对于简单应用,频谱可被分解成四个部分:距离压缩项,距离迁移(RCM)项,方位压缩项和方位缩放项。
前三项是单基SAR信号的基础部分。
因此,RDA可以将所提出的频谱用于处理方位空变BiSAR数据。
对于CSA 的应用,关键的一点是如何确定比例因子。
在这篇文章中,发射机斜距的线性近似可用于推算出这个因子。
利用这个因子,单基SAR的三个相应相位项可以实现。
这两个方法只处理有一般单基SAR特性的非相关信号。
对于方位空变BiSAR,时域中方位缩放现象是不可避免的的。
本文中可以用ISFT校正它。
对于方位空变BiSAR系统,发射机与接收机之间速度矢量不等可能导致相同距离的目标在不同合成波束中心交叉时间点上有不同的倾斜角。
结果,方位空变倾斜角将导致处于相同距离的目标有不同的多普勒曲线。
这表示相同距离目标将需要不同的RCM校正(RCMC)、二次距离压缩(SRC)和方位匹配滤波,它是主要SAR处理操作。
因此,前面的处理操作不能直接应用于整个数据块。
为处理这个问题,提出了方位不变域,方位不变域在合成波束中心的的倾斜角可以被看做是常数。
这表示处理效率将减小。
然而,这两个算法不能处理方位空变双基系统大斜视和一维固定情况。
对于大斜视情况,它们在处理距离方位耦合方面有本质的局限。
对于一维固定双基系统,固定平台对多普勒调整和依赖多普勒的距离迁移没有作用,而是对相同距离目标的距离迁移轨迹给出距离补偿。
补偿是由目标相对固定平台而言不同的方位向位置决定的。
补偿导致相同距离下的目标的距离迁移轨迹归于同一双曲线。
先前的两个基于多普勒的算法不能处理这种距离补偿,它不能处理一维固定双基系统。
这篇论文作如下编排:首先在第二部分讲述BPTRS的扩展。
在第三部分简要概述RDA的应用,第四部分讨论CSA在BiSAR处理中的应用。
在第五部分将用星载/机载真实原始数据验证所提出的BPTRS和处理算法的准确性。
最后,在第六部分给出结论。
2 近似BiSAR图1给出了BiSAR成像几何结构,此图中BiSAR有两个移动平台。
单位坐标系中x-y平面定义为地表,z轴表示沿垂直方向远离地面。
图1双基系统成像几何结构本文用到的数学符号和它们的定义如下:τ,t:方位向时间变量和距离向时间变量;(τ0R,R0R): 接收机参考坐标,定义为成像空间坐标;σ(τ0R,R0R): 位于(τ0R,R0R)的点目标的后向散射系数;R0R,R0T: 从发射机和接收机到点目标的最短斜距;v R,v T: 接收机和发射机的平台速度;c: 光速;λ,f0: 发射信号的载波波长和频率;f ,f τ: 距离向频率变量和方位向频率变量; τ0R ,τ0T : 发射机与接收机的零多普勒时间; τcb :合成波束中心相交时间;θSR ,θST :发射机和接收机在合成波束中心相交点的倾斜角 位于(τ0R ,R 0R )点目标(如图1)接收信号经过调制后为g (τ,t,τ0R ,R 0R )=σ(τ0R ,R 0R )s l (t −R R (τ)+R T (τ)C)exp [−j2R R (τ)+R T (τ)λ]ω(τ−τcb ) (1)此处ω(τ-τcb )是中心在方位向时间点τcb 合成天线方向图。
它可以被近似为地面上的各向同性照射并简化为两个矩形函数的乘积:W T [(τ−τcb )T SC]W R [(τ−τcb )T SC]。
T SC 是目标方位向的综合曝光时间。
s l (t)表示发射信号。
R R (τ)和R T (τ)是从发射机和接收机到点目标的瞬时斜距,定义为R R (τ)=√R 0R 2+(τ−τ0R )2v R 2R T (τ)=√R 0T 2+(τ−τ0T )2v T 2 (2)对(1)式做二维傅里叶变换,得到:G (f τ,f ,τ0R ,R 0R )=σ(τ0R ,R 0R )S L (f )∫ω(τ−τcb )exp [−2π(f +f 0)R R (τ)+R T (τ)C]exp (−j2πf ττ)dτ (3)此处S L (f )是式(3)中发射信号的频谱,可以看出(3)式中积分包含DSR 项,很难应用驻定定理来解出这个积分。
为规避式(3)中DSR 项的局限,我们用下面的傅里叶展开来代替两个双曲线平方根项。
W R [τ−τcb T SC ]exp [−2πf +f 0c ]R R (τ)]=∫W R [τR (f τR)−τcbT SC]exp [−jϕR (f τR ,f ]exp [j2πf τR τ]df τRW T [τ−τcb T SC]exp [−2πf +f 0c]R T (τ)]=∫W T [τT (f τT )−τcbT SC]exp [−jϕT (f τT ,f ]exp [j2πf τT τ]df τT (4)此处f τR 和f τT 表示两个方位向频率变量并表示了发射机接收机距离行波对多普勒频率f τ的贡献。
这样,我们总是有f τR +f τT =f τ,ϕR 和ϕT 被定义为ϕR (f τR ,f )=2πf τR τ0R +2πR 0Rc√(f +f 0)2−(cf τR v R)2ϕT (f τT ,f )=2πf τT τ0T +2πR 0Tc√(f +f 0)2−(cf τT v R)2(5)τR (f τR )和τT (f τT)是发射机和接收机的离散时间多普勒对应,分别得出τR (f τR)=τ0R −c v R2f √(f +f 0)2−(τR v R)2τT (f τT)=τ0T c v T2f √(f +f 0)2−(τT v T )2(6)将式(4)—(6)代入(3)式G (f τ,f ,τ0R ,R 0R )=σ(τ0R ,R 0R )S L (f )∫exp (−j2πf ττ)[∬W R [f τR −f DCR K aR T SC]W T [f τT −f DCT K aT T SC]exp (j2πf ττ) ]exp {−j[ϕR (f τR ,f )+ϕT (f τT ,f )]}∗df τR df τT ]dτ (7) 从式(7)中,我们可以发现f τR 和f τT 以多普勒中心频率f DCR 和f DCT 为中心,宽度为K aR T SC 和K aT T SC ,它们分别为f DCR =v R sinθSRc/(f +f 0)f DCT =v T sinθSTc/(f +f 0)K aR=v R 2cos 3θSR λR 0RK aT =v T 2cos 3θSTλR 0T(8)2DSP 可以用于解出(7)中的双重积分。
对(7)式相位相对于f τR 和f τT 求偏导得0,我们可以得出[(,)+(,)2()0R R T R R T Rf f f f f f f τττττφφπτ∂--=∂[(,)+(,)2()0R R T R R T Rf f f f f f f τττττφφπτ∂--=∂ (9)利用恒等式(9)f τ=f τR +f τT 我们可以近似地确定f τR 和f τT 的值f τR =k R (f τ−f DCR −f DCT )+f DCRf τT =k T (f τ−f DCR −f DCT )+f DCT (10)此处k R 和k T 由下式给出:k R =K aRK aR +K aTk T =K aTK aR +K aT(11)将(10)式代入(7)式中的双重积分项忽略复杂因子得出:∬W R [f τR −f DCR K aR T SC]W T [f τT −f DCT K aT T SC]exp (j2πf ττ) ]exp {−j[ϕR (f τR ,f )+ϕT (f τT ,f )]}df τR df τT =W R [f τR −f DCR K aR T SC]W T [f τR −f DCR K aR T SC]exp [j2π(f τR +f τT )τ ]exp {−j[ϕR (f τR ,f )+ϕT (f τT ,f )]} (12)我们进一步将(12)式代入(7)式,得出 G (f τ,f ,τ0R ,R 0R )=σ(τ0R ,R 0R )S L (f )∫W R [f τR −f DCR K aR T SC]W T [f τT −f DCT K aT T SC]exp (−j2πf τ)exp [j2π(f τR +f τT )τ ]exp {−j[ϕR (f τR ,f )+ϕT (f τT ,f )]}dτ=σ(τ0R ,R 0R )S L (f )∫W R [f τR −f DCR K aR T SC]W T [f τT −f DCT K aT T SC]exp {−j[ϕR (f τR ,f )+ϕT (f τT ,f )]}dτ(13)(13)式中的被积函数相位项与变量τ独立,(13)式可以进一步表达为 G (f τ,f ,τ0R ,R 0R )=σ(τ0R ,R 0R )S L (f )W R [f τR −f DCR K aR T SC]W T [f τT −f DCT K aT T SC]exp {−j[ϕR (f τR ,f )+ϕT (f τT ,f )]}(14)我们引入一个多普勒频域复合窗函数。