Arduino与Processing连接互动(才格力图整理)
- 格式:doc
- 大小:267.50 KB
- 文档页数:4
Arduino与Processing连接互动Arduino与Processing连接互动可以做出很多有趣的东西,Processing是通过视觉来展现的,而Arduino就可以充当外用的设备来控制Processing的视觉展现。
例如:用光敏传感器来控制图像的暗量程度,震动传感器来控制屏幕中的泡泡的震动等等。
上位机软件是Processing,它可以与人际物理世界互动,通过Arduino装置,让人的各种物理感官与电脑屏幕的数位艺术作品产生交流。
先认识一下串口输出的有关串口通讯:•串口队列(Buffer)–PC和Arduino间的缓冲区•串口输入函数–Serial.available()•返回值:当前可读的数据数目•函数Serial.available()的功能是返回串口缓冲区中当前剩余的字符个数,按照Arduino提供的该函数的说明,串口缓冲区中最多能缓冲128个字节。
–Serial.read()•如果串口没有数据可读,返回 -1•如果串口有数据可读,返回第一个字符,并从串口队列中取出–Serial.peek()•如果串口没有数据可读,返回-1•如果串口有数据可读,返回第一个字符,但不从串口队列取出,因此下次还能读到–Serial.flush()•清空串口队列•串口初始化函数–Serial.begin(speed)•speed: 300, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400,57600, 115200–通常在 setup() 函数里调用•串口输出函数–Serial.print(val), Serial.println(val)•输出ASCII码(后者多一个回车换行)–Serial.print(val, format) , Serial.println(val, format)•按指定格式输出(后者多一个回车换行)•Serial.print(78)–输出"78"•Serial.print(1.23456)–输出"1.23"•Serial.print(byte(78))输出“N”(N的ASCII码值为78))(以byte进行传送,显示以ASCII编码方式) –•Serial.print('N')–输出"N"•Serial.print("Hello world.")–输出"Hello world."下面是ASCII码对照表:两个软件之间的通讯基本上是ASCII码。
ArduinoLED流⽔灯·基础实验Arduino初学IO控制,流⽔灯实验是很好的学习对象。
分两个进程学习。
⼀、假流⽔灯,即基础效果实现⼆、真流⽔灯,即采⽤PWM模拟真实流⽔渐变效果我们设⽴5盏灯,正极分别连接数字⼝(Digital Pin)3 5 9 10 11⼝,负极共地(GND)假流⽔灯int LED1 = 3;int LED2 = 5;int LED3 = 9;int LED4 = 10;int LED5 = 11;void setup() {pinMode(LED1, OUTPUT);pinMode(LED2, OUTPUT);pinMode(LED3, OUTPUT);pinMode(LED4, OUTPUT);pinMode(LED5, OUTPUT);}void loop() {//状态1digitalWrite(LED1, 1); //1 代表 HIGH 0 代表 LOWdigitalWrite(LED2, 0);digitalWrite(LED3, 0);digitalWrite(LED4, 0);digitalWrite(LED5, 0);delay(1000);//状态2digitalWrite(LED1, 0);digitalWrite(LED2, 1);digitalWrite(LED3, 0);digitalWrite(LED4, 0);digitalWrite(LED5, 0);delay(1000);//状态3digitalWrite(LED1, 0);digitalWrite(LED2, 0);digitalWrite(LED3, 1);digitalWrite(LED4, 0);digitalWrite(LED5, 0);delay(1000);//状态4digitalWrite(LED1, 0);digitalWrite(LED2, 0);digitalWrite(LED3, 0);digitalWrite(LED4, 1);digitalWrite(LED5, 0);delay(1000);//状态5digitalWrite(LED1, 0);digitalWrite(LED2, 0);digitalWrite(LED3, 0);digitalWrite(LED4, 0);digitalWrite(LED5, 1);delay(1000);}使⽤状态控制法去实现,⽅便理解和修改,每个状态持续⼀段时间,即使⽤delay()。
![Arduino 的代码和连接[共2页]](https://uimg.taocdn.com/0da032d602020740bf1e9b5c.webp)
第5章 触控图5-2 按钮的底部上拉电阻为了读取数据针脚的信息,它一定要被连接到微控制器上。
你不应该读取一个未连接的悬空引脚。
当某个引脚什么都没有连接时,上拉电阻会将其上拉为高电平,从而避免了悬空状态。
读取数据针脚状态的命令有:digitalRead()、analogRead()、botbook_gpio.read()、botbook_ mcp2003.readAnalog()。
接地或接高电平的引脚是最直观的例子:当读取它的状态时,其状态清晰可辨。
若引脚接地(GND,0V)则数字输入LOW值;若引脚接高电平(+5V或+3.3V)则数字输入HIGH值。
如果读取的是未连接的悬空引脚,你将会得到不确定的数值,可能是HIGH,可能是LOW,可能每秒钟都会改变,可能一直都不改变。
这种不确定的数值完全没有用处,因此读取悬空引脚毫无意义。
思考一下这样的电路:按钮一边接数据针脚,一边接地(见图5-3)。
当按钮按下后,数据针脚连接到了GND,因此其值为LOW。
但是若按钮未按下呢?你必须使用上拉电阻让数据针脚为HIGH。
上拉电阻的阻值通常很大。
我们通常会选择数万欧姆的电阻。
这样当按钮按下时,数据针脚就同时连接了GND和上拉电阻。
但此时并不会发生短路,因为+5V和GND之间有电阻,而不是直接导通了+5V和GND。
为方便起见,以下的代码使用内置的上拉电阻。
对于Arduino,使用一行代码就能启动内置的上拉电阻。
对于Raspberry Pi,则直接使用一个一直连接上拉电阻的引脚。
Arduino的代码和连接搭建图5-3所示的电路并上传案例5-1中的代码。
效果为按钮按下时点亮板载LED。
如果按下按钮后LED没有任何反应,检查一下按钮的连接方式是否正确。
71。
基于Arduino与Processing的心率检测计设计研究
臧红波;华拓;管志岳
【期刊名称】《家电维修》
【年(卷),期】2024()3
【摘要】随着社会经济的高速发展,人们的物质生活也有了极大的提高,但同时也伴随着各种疾病的到来,身体健康已经成为人们普遍关注的焦点,因此,心率检测仪、血压计、血糖仪等各种家用医疗监测仪器已经逐渐融入日常生活。
心脏病是人们难以预防的突发致命疾病之一,本文介绍的是一款基于Arduino【是基于易用硬件和软件的原型开源平台,包由可编程的电路板(简称微控制器),以及集成开发环境(称为Arduino IDE)的现成软件组成】Processing(开源编程语言,包括编辑器、编译器、展示器)的简易心率检测计系统,其功能实用、操作简单,可以测量心率,当超出正常心率范围时及时预警,是一款便携的实时心率测试仪。
【总页数】3页(P74-76)
【作者】臧红波;华拓;管志岳
【作者单位】无锡职业技术学院;宝克(中国)测试设备有限公司
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于Arduino的远程心率监测系统的设计
2.基于Arduino和LabVIEW的脉搏心率检测仪
3.基于Arduino与Processing的悬挂画图机器人的设计
4.基于
Arduino的心率计步器的设计实现5.基于ESP32和Arduino IDE的可测心率的智能门锁系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。

arduino原理图
Arduino原理图是一种电路图,用于展示Arduino板子上各个
元件之间的连接关系。
在原理图中,每个元件都用特定的符号表示,而连接线则表示它们之间的电路连接。
以下是一个示例的Arduino原理图:
[示例原理图]
在这个原理图中,我们可以看到几个关键的元件,包括Arduino主控板(表示为一个矩形方块),传感器模块(表示
为一个带有标识符的圆圈)和其他外设(如电机,LED等)。
Arduino主控板上有各种引脚,用于连接其他元件或传输数据。
这些引脚通常以数字引脚(D)和模拟引脚(A)的形式存在。
数字引脚用于数字输入或输出,而模拟引脚用于模拟输入或输出。
在原理图中,连接线表示电路中的导线或电缆。
它们通常以直线或曲线的形式出现,表示元件之间的电路连接。
连接线也可以用于表示分支或连接点。
除了连接线外,原理图中还包含了一些其他符号和标注,用于指示电路中的相关信息。
例如,电阻器可以用一个特殊的符号表示,电容器可以用一个带有两个垂直线的符号表示,等等。
总之,Arduino原理图是一种重要的工具,用于理解和设计Arduino电路。
通过仔细观察和研究原理图,我们可以了解
Arduino板子上各个元件之间的连接方式,以及它们在电路中的作用。
![Arduino 的键盘代码和连接[共2页]](https://uimg.taocdn.com/3c4dd224f90f76c660371a6a.webp)
传感器实战全攻略在Raspberry Pi上也能使用USB键盘或USB数字键盘。
在每个按键的下面都布有横纵交叉的导线。
当按下按键后,交叉点的导线就被接通了。
为了找出用户按下了哪一个按键,你需要先把键盘中的某一列置为低电平,其余列置为高电平。
当用户按下某个按键时,如果发现某一行也为低电平,说明此行和此列就是按键按下的位置。
如果没有任何行是低电平,则继续尝试其他列,直到找出那个按下的按键。
下面的代码会不断地检测所有的列,但是当按下多个按键时,程序只会返回第一个检测到的变化的列。
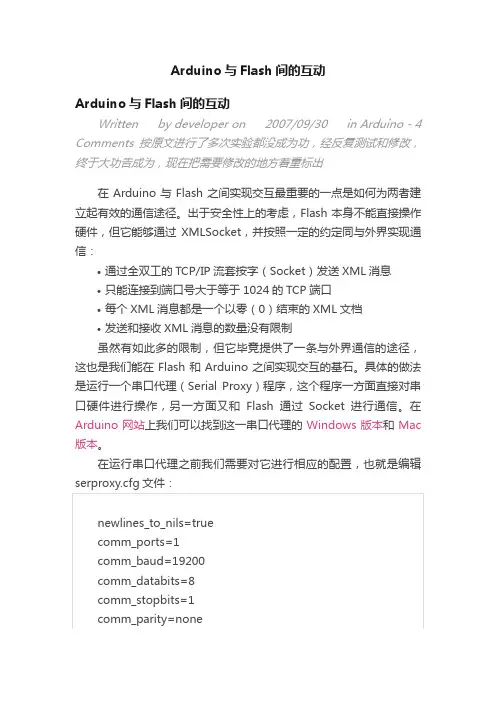
Arduino的键盘代码和连接图9-2展示了Arduino和键盘的连接。
搭建完毕后运行案例9-1中的程序。
图9-2 Arduino和键盘连接Arduino内置了上拉电阻。
当数字引脚是INPUT模式时,代码digitalWrite(pin, HIGH)就会将其连入的20kΩ的电阻并接到+ 5V上。
案例9-1. keypad.ino// keypad.ino -读取16键的数字键盘(的sku为149608)// (c) - Karvinen, Karvinen, Valtokariconst int count =4;// Achar keymap[count][count]={// B{'1', '2', '3', 'A'},{'4', '5', '6', 'B'},{'7', '8', '9', 'C'},{'*', '0', '#', 'D'}};const char noKey ='n';byte columns[count]={9,8,7,6};// C190。

Arduino手把手系列教程Arduino手把手入门系列教程1――什么是Arduino/Arduino是什么Arduino是一块简单、方便使用的通用GPIO接口板,并可以通过USB接口和电脑通信。
作为一块通用IO接口板,Arduino提供丰富的资源,包括:13个数字IO口(DIO数字输入输出口);6个PWM输出(AOUT可做模拟输出口使用);5个模拟输入口(AIN模拟输入)。
Arduino开发使用java开发的编程环境,使用类c语言编程,并提供丰富的库函数。
Arduino可以和下列软件结合创作丰富多彩的互动作品:Flash,Processing,Max/MSP,VVVV。
等。
Arduino也可以用独立的方式运作,开发电子互动作品,例如:开关控制Switch、传感器sensors输入、LED等显示器件、各种马达或其它输出装置。
下面是Arduino的硬件实物图片:Arduino实物图Arduino手把手入门系列教程2――Arduino可以做什么目前计算机的输入和输出设备,大家常见的、也是大家做熟悉的就是:键盘(输入)、鼠标(输入)、麦克(输入)和音响(输出)、显示器(输出);对于一些玩游戏的朋友可能还包括游戏杆(输入),做音乐的可能还会接触到MIDI(输入)。
上述设备都很专业,功能也非常专一。
你没办法让键盘给你唱歌,同样,你也没办法让音响替你输入文本。
Arduino更像是一种半成品,它提供通用的输入输出接口。
你可以通过编程,把Arduino加工成你需要的输入输出设备。
你可以把Arduino做成键盘、鼠标、麦克等输入设备;你也可以把Arduino做成音响、显示器等输出设备。
最重要的是,你可以把Arduino做成任何你希望的互动工具(输入和输出)。
如果你愿意,或者你需要,你完全可做使用Arduino开发出一个会唱歌的键盘或者一个让你的音响替你打字。
(夸张的说法)总之,Arduino是什么,是根据你的需求来确定的。
Arduino与Flash间的互动Arduino与Flash间的互动Written by developer on 2007/09/30 in Arduino - 4 Comments按原文进行了多次实验都没成为功,经反复测试和修改,终于大功告成为,现在把需要修改的地方着重标出在Arduino与Flash之间实现交互最重要的一点是如何为两者建立起有效的通信途径。
出于安全性上的考虑,Flash本身不能直接操作硬件,但它能够通过XMLSocket,并按照一定的约定同与外界实现通信:•通过全双工的TCP/IP流套按字(Socket)发送XML消息•只能连接到端口号大于等于1024的TCP端口•每个XML消息都是一个以零(0)结束的XML文档•发送和接收XML消息的数量没有限制虽然有如此多的限制,但它毕竟提供了一条与外界通信的途径,这也是我们能在Flash和Arduino之间实现交互的基石。
具体的做法是运行一个串口代理(Serial Proxy)程序,这个程序一方面直接对串口硬件进行操作,另一方面又和Flash通过Socket进行通信。
在Arduino网站上我们可以找到这一串口代理的Windows版本和Mac 版本。
在运行串口代理之前我们需要对它进行相应的配置,也就是编辑serproxy.cfg文件:按照上面的配置,我使用的是Windows下的COM1,波特率为19200bps,并且是在TCP端口5331上接受来自Flash的XMLSocket 连接。
以上serproxy.cfg文件和我的不大一样,需要修改一个重要的地方:以下是我的serproxy.cfg的内容# Config file for serproxy# See serproxy's README file for documentation# Transform newlines coming from the serial port into nils # true (e.g. if using Flash) or falsenewlines_to_nils=true# Comm ports usedcomm_ports=1,2,3,4,5,6# Default settingscomm_baud=9600 //一定样认真核对波特率,要与下位程序arduino里的一致,否则会出现乱码,自然无法通讯comm_databits=8comm_stopbits=1comm_parity=none# Idle time out in secondstimeout=300# Port 1 settings (ttyS0)net_port1=5331# Port 2 settings (ttyS1)net_port2=5332# Port 3 settings (ttyS2)net_port3=5333# Port 4 settings (ttyS3)net_port4=5334# Port 5 settings (ttyS4)net_port5=5335# Port 6 settings (ttyS5)net_port6=5336我使用的是Windows下的COM4,波特率为9600bps,并且是在TCP端口5331上接受来自Flash的XMLSocket连接有了串口代理的帮助,对于Arduino来讲就是通过串口接受来自Flash的命令,然后执行相应的操作,或者通过串口向Flash发送命令。
Arduino get用法什么是Arduino?Arduino是一款开源的物联网开发平台,由一块基于Atmel AVR微控制器的开发板和一个基于Processing开发环境的集成开发环境(IDE)组成。
它具有简单易用、灵活可扩展的特点,非常适合初学者和专业人士进行创造性的项目开发。
Arduino的基本用法在开始介绍Arduino的get用法之前,我们先来了解一下Arduino的基本用法。
1. 准备工作首先,你需要准备以下材料:•Arduino开发板•USB数据线•电脑•一些电子元件,如电阻、LED等然后,按照以下步骤进行准备:1.将Arduino开发板连接到电脑上,通过USB数据线进行连接。
2.打开Arduino集成开发环境(IDE)。
3.在IDE中选择正确的开发板类型和端口。
4.编写你的代码。
5.上传代码到开发板。
6.观察结果。
2. 编写代码在Arduino的IDE中,你可以使用C/C++语言编写代码。
以下是一个简单的示例代码:void setup() {pinMode(13, OUTPUT); // 设置13号引脚为输出模式}void loop() {digitalWrite(13, HIGH); // 将13号引脚输出高电平delay(1000); // 延时1秒digitalWrite(13, LOW); // 将13号引脚输出低电平delay(1000); // 延时1秒}上面的代码通过控制13号引脚的电平来控制一个LED的闪烁。
3. 上传代码当你编写好代码后,可以点击IDE界面上的“上传”按钮将代码上传到开发板上。
上传完成后,你就可以看到代码的执行结果了。
Arduino get用法Arduino的get用法指的是如何获取来自外部的输入信号,例如传感器数据、按钮状态等。
通过获取这些输入信号,你可以编写代码来实现各种功能。
1. 数字输入Arduino可以通过数字引脚来获取数字输入信号。
你可以使用digitalRead()函数来读取引脚的状态。
我想做一个包含3个超声波测距的Arduino程序,然后每个超声波到一定距离后,可以发出不同的声音,这是Arduino代码:intsrfPin[] = {2,4,6}; //定义srfPin发送引脚为2int z; //定义全局变量zint Distance; //定义距离寄存器存放测试距离数据int duration; //定义脉宽寄存器int data; //定义串口接收寄存器int ultrasonic(int distance){for(int i=0;i<3;i++){digitalWrite(srfPin, LOW); // 确保在发送脉冲前保持该引脚为低电平delayMicroseconds(2); //保持低电平2msdigitalWrite(srfPin, HIGH); // 发送一个高脉冲开始测距 delayMicroseconds(10); //保持10msdigitalWrite(srfPin, LOW); // 在等待脉冲返回来之前发送低电平pinMode(srfPin, INPUT); //调整超声波引脚为输入 duration = pulseIn(srfPin, HIGH); // 从SRF05回波脉冲在读取在微秒 distance = duration/58; // 除以58就是我们要得到的厘米数}return distance; //返回厘米数}void setup(){Serial.begin(9600); //打开串口并设置通信波特率为9600pinMode(13,OUTPUT); //定义I1接口}void loop(){ //主程序开始Distance = ultrasonic(z); //读取超声波值Serial.write(byte(Distance));delay(100);}那么,如何写个processing代码来使里面有声音并且每个超声波测距对应不同的音频呢?。
基于Arduino与Processing的悬挂画图机器人的设计高明华;黎强;叶子恒;张寒儒;王珍;许丽金【摘要】针对目前的绘画机器人存在价格高、结构复杂、难以实现、功能扩展有限等问题,设计一种基于Arduino与Pro-cessing的悬挂式画图机器人.对机器人的软硬件选择、程序设计以及机器人本体结构进行详细的介绍.文中机器人通过控制一支悬挂的笔,使其进行规律的机械运动来绘出用户在上位机中加载的图片.它能在各种垂直的平面上作画,并且作画范围可根据需求进行调整.经多次实验验证,能画出完整的作品,且运行稳定,有一定的应用前景.【期刊名称】《现代电子技术》【年(卷),期】2018(041)024【总页数】4页(P153-156)【关键词】Arduino;Processing;悬挂画图机器人;机械运动;程序设计;本体结构【作者】高明华;黎强;叶子恒;张寒儒;王珍;许丽金【作者单位】华东交通大学信息工程学院,江西南昌 330013;华东交通大学信息工程学院,江西南昌 330013;华东交通大学信息工程学院,江西南昌 330013;华东交通大学信息工程学院,江西南昌 330013;华东交通大学信息工程学院,江西南昌330013;华东交通大学信息工程学院,江西南昌 330013【正文语种】中文【中图分类】TN830.1-34;TP193机器人是一种综合类的高新技术产品,结合了多学科的先进技术,如电子、机械、计算机、艺术、机构学等。
机器人的普及和应用很大程度地提高了人们的生活水平,改善了人们的生活质量。
人类最初发明的机器人被称为“机械手”,目的是用其代替人劳动,从事一些高危、艰苦、单调的工作,改善人们的劳动条件。
随着电子信息技术的不断进步,更多种类的机器人被研发出来,适应人们的各种需求,并在越来越多的领域“崭露头角”。
如今市面上出现各式各样的机器人开始进军艺术领域,设计者们将艺术与电子科学技术相结合,碰撞出了激烈火花。
arduino处理流程控制的函数英文版Arduino Process Control FunctionsArduino is an open-source physical computing platform based on a simple I/O board and a development environment that implements the processing language. It can be used to develop stand-alone interactive objects or can be connected to software on your computer (e.g., Flash, Processing, etc.). The board can be interacted with via various sensors and can control various devices such as LEDs, motors, servos, and other physical outputs.One of the key features of Arduino is its ability to handle process control functions. These functions allow you to control the flow of your program based on specific conditions or events. Here are some of the common process control functions used in Arduino:setup(): This function is called once when the Arduino board resets or powers up. It's typically used to initialize variables, pin modes, and set up any required hardware components.loop(): This function contains the main program code that runs repeatedly in a loop forever. It's where you'll put most of your program's logic.if Statements: These statements allow you to check if a condition is true or false and execute a block of code accordingly. For example, you can use an if statement to check if a sensor value is above a certain threshold and turn on an LED if it is.else and else if Statements: These statements allow you to specify multiple conditions and execute different blocks of code based on which condition is true.for Loops: These loops allow you to iterate over a range of values and perform a specific task for each value. For example, you can use a for loop to blink an LED a specific number of times.while Loops: These loops allow you to repeatedly execute a block of code while a condition is true. They're useful for tasks that need to continuously run until a specific event occurs.delay() and delayMicroseconds(): These functions pause the execution of your program for a specified number of milliseconds or microseconds, respectively. They're useful for creating timed delays between actions.By combining these process control functions, you can create complex and interactive Arduino projects that respond to various inputs and control various outputs based on specific conditions or events.中文版Arduino处理流程控制的函数Arduino是一个基于简单I/O板和实现处理语言的开发环境的开源物理计算平台。
传感器实战全攻略
Arduino的MPU 6050代码和连接
中的代码。
图8-5展示了Arduino的连接图。
搭建完毕后运行案例8-3
图8-5
Arduino的MPU 6050(加速度传感器+陀螺仪)电路
这段代码难度超高!和本书的其他案例相比,本代码含有很多较难理解的概念。
如果你对字节顺序、移位以及结构体表示难以理解,那么没有必要深究了,直接使用代码和相应的结果即可。
如果你想理解代码的原理,可以参考代码后的说明,例如,第171页的“十六进制、二进制和其他数制系统”以及第174页的“位运算”。
案例8-3.mpu_6050.ino
// mpu_6050.ino -输出加速度(m/s**2)和角速度(gyro,deg/s)
// (c) - Karvinen, Karvinen, Valtokari
#include <Wire.h>// A
const char i2c_address=0x68;// B
const unsigned char sleep_mgmt=0x6B;// C
const unsigned char accel_x_out =0x3B;
struct data_pdu // D
{
int16_t x_accel;// E
int16_t y_accel;
int16_t z_accel;
int16_t temperature;// F
int16_t x_gyro;// G
int16_t y_gyro;
int16_t z_gyro;
};
void setup() {
164。
第四十课 Arduino 连接开关按钮或开关连接电路中的两个开路端子。
当按下连接到引脚8的按钮开关时,此示例打开引脚2上的LED。
下拉电阻在电子逻辑电路中使用下拉电阻,以确保在外部器件断开连接或处于高阻抗状态时,Arduino的输入信号达到预期的逻辑电平。
虽然没有任何东西连接到输入引脚,但这并不意味着它是一个逻辑0。
下拉电阻连接在地面和器件上相应的引脚之间。
下图显示了数字电路中下拉电阻的示例。
在电源电压和微控制器引脚之间连接了一个按钮开关。
在这样的电路中,当开关闭合时,微控制器输入处于逻辑高值;但是当开关打开时,下拉电阻将输入电压下拉到接地(逻辑零值),防止输入处于未定义状态。
下拉电阻的电阻必须大于逻辑电路的阻抗,否则可能会使电压下降太多,而无论开关的位置如何,引脚处的输入电压将保持在恒定的逻辑低值。
必需的组件你将需要以下组件:∙ 1 × Arduino UNO 板∙ 1 × 330欧姆电阻∙ 1 × 4.7K欧姆电阻(下拉)1 × LED程序按照电路图进行连接,如下图所示。
草图在计算机上打开Arduino IDE软件。
使用Arduino语言进行编码控制你的电路。
通过单击“New”打开一个新的草图文件。
Arduino代码代码说明当开关打开时(按钮未被按下),按钮的两个端子之间没有连接,因此引脚接地(通过下拉电阻),我们读取低电平。
当开关闭合时(按钮被按下),它在其两个端子之间建立连接,将引脚连接到5伏,这样我们读出高电平。
结果按下按钮时LED亮灯,松开按钮时LED熄灯。
Arduino与Processing连接互动
Arduino与Processing连接互动可以做出很多有趣的东西,Processing是通过视觉来展现的,而Arduino就可以充当外用的设备来控制Processing的视觉展现。
例如:用光敏传感器来控制图像的暗量程度,震动传感器来控制屏幕中的泡泡的震动等等。
上位机软件是Processing,它可以与人际物理世界互动,通过Arduino装置,让人的各种物理感官与电脑屏幕的数位艺术作品产生交流。
先认识一下串口输出的有关串口通讯:
•串口队列(Buffer)
–PC和Arduino间的缓冲区
•串口输入函数
–Serial.available()
•返回值:当前可读的数据数目
•函数Serial.available()的功能是返回串口缓冲区中当前剩余的字符
个数,按照Arduino提供的该函数的说明,串口缓冲区中最多能缓
冲128个字节。
–Serial.read()
•如果串口没有数据可读,返回 -1
•如果串口有数据可读,返回第一个字符,并从串口队列中取出
–Serial.peek()
•如果串口没有数据可读,返回-1
•如果串口有数据可读,返回第一个字符,但不从串口队列取出,因
此下次还能读到
–Serial.flush()
•清空串口队列
•串口初始化函数
–Serial.begin(speed)
•speed: 300, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400,
57600, 115200
–通常在 setup() 函数里调用
•串口输出函数
–Serial.print(val), Serial.println(val)
•输出ASCII码(后者多一个回车换行)
–Serial.print(val, format) , Serial.println(val, format)
•按指定格式输出(后者多一个回车换行)
•Serial.print(78)
–输出"78"
•Serial.print(1.23456)
–输出"1.23"
•Serial.print(byte(78))
输出“N”(N的ASCII码值为78))(以byte进行传送,显示以ASCII编码方式) –
•Serial.print('N')
–输出"N"
•Serial.print("Hello world.")
–输出"Hello world."
下面是ASCII码对照表:
两个软件之间的通讯基本上是ASCII码。
Serial.print( 78,BYTE);或Serial.print(byte(78));例如:
在arduino中发送:46
Serial.print( 46,BYTE);
在Processing中接受:46
Processing中显示的是46。