转向盘中间位置操纵稳定性试验评价指标分析
- 格式:docx
- 大小:13.17 KB
- 文档页数:1
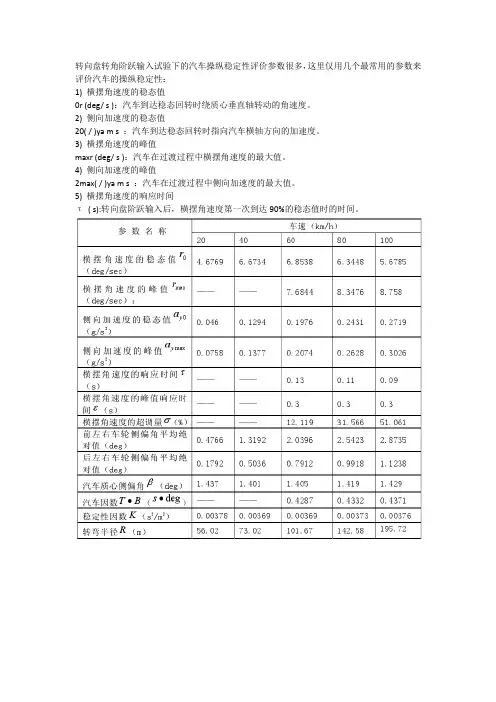
转向盘转角阶跃输入试验下的汽车操纵稳定性评价参数很多,这里仅用几个最常用的参数来评价汽车的操纵稳定性:
1) 横摆角速度的稳态值
0r (deg/ s ):汽车到达稳态回转时绕质心垂直轴转动的角速度。
2) 侧向加速度的稳态值
20( / )ya m s :汽车到达稳态回转时指向汽车横轴方向的加速度。
3) 横摆角速度的峰值
maxr (deg/ s ):汽车在过渡过程中横摆角速度的最大值。
4) 侧向加速度的峰值
2max( / )ya m s :汽车在过渡过程中侧向加速度的最大值。
5) 横摆角速度的响应时间
τ( s):转向盘阶跃输入后,横摆角速度第一次到达90%的稳态值时的时间。
汽车操纵稳定性试验解析!汽车的操稳性不仅影响到汽车驾驶的操纵方面,而且也是决定汽车安全行驶的一个主要性能;为了保证安全行驶,汽车的操稳性受到汽车设计者很大的重视,成为现代汽车的重要使用性能之一,如何试验并评价汽车的操稳性显得极其重要。
汽车操控稳定性分为两个方面:1、操控性: 指汽车能够确切的响应驾驶员转向指令的能力;2、稳定性:指汽车受到外界扰动(路面扰动或阵风扰动)后恢复原来运动状态的能力。
一、常用试验仪器1、陀螺仪:用于汽车运动状态下测动态参数,如汽车行进方位角,汽车横摆角速度,车身侧倾角及纵倾角等;2、光束水准车轮定位仪:测车轮外倾角,主销内倾角,主销外倾角,车轮前束,车轮最大转角及转角差;3、车辆动态测试仪:测汽车横摆角速度,车身侧倾角及纵倾角,汽车横向加速度与纵向加速度等运动参数;4、力矩及转角仪:测转向盘转角或力矩;5、五轮仪和磁带机等。
二、试验分类三、稳态回转试验01试验步骤1、在试验场上,用明显的颜色画出半径为15m或20m的圆周;2、接通仪器电源,使之加热到正常工作温度;3、试验开始前,汽车应以侧向加速度为3m/s2的相应车速沿画定的圆周行驶500m以使轮胎升温。
4、以最低稳定速度沿所画圆周行驶,待安装于汽车纵向对称面上的车速传感器在半圈内都能对准地面所画的圆周时,固定转向盘不动,停车并开始记录,记下各变量的零线,然后,汽车起步,缓缓连续而均匀地加速(纵向加速度不超过0·25m/s2),直至汽车的侧向加速度达到6·5m/s2为止,记录整个过程。
5、试验按向左转和右转两个方向进行,每个方向试验三次。
每次试验开始时车身应处于正中央。
02评价条件1、中性转向点侧向加速度值An:前后桥侧偏角之差与侧向加速度关系曲线上斜率为零的点的侧向加速度值,越大越好;2、不足转向度:按前后桥侧偏角之差与侧向加速度关系曲线上侧向加速度2m/s2点的平均值计算,越小越好;3、车厢侧倾度K:按车厢侧倾角与侧向加速度关系曲线上侧向加速度2m/s2点的平均斜率计算,越小越好。
汽车操纵稳定性主观评价试验方法和术语解释力的建立试验路面:平直路面。
驾驶方式:车速在20km/h到最高车速80%间变换,从中间位置开始向左或向右转动方向盘,侧向加速度不超过0.4g。
评价内容:转向力开始建立的感觉以及随车速的变化。
驻车/低速转向力试验路面:沥青或水泥路面。
驾驶方式:停车,发动机启动,均匀的转动方向盘至左右极限位置,手刹松开;低速转向车速10km/h左右。
评价内容:转向力的大小及是否存在周期或非周期性的波动。
力的水平试验路面:中等半径的沥青或水泥弯道。
驾驶方式:以不同的车速通过同一个弯道,弯道中保持方向盘转角不变。
评价内容:转向力的大小及随通过车速的变化。
转向力线性试验路面:平直路面。
驾驶方式:分别以40km/h、80km/h、120km/h的速度行驶,向左或向右转动方向盘,侧向加速度不超过0.6g。
评价内容:转向力的变化是否是逐渐增长的,不应有突然的变大或变小情况。
回正能力试验路面:平直路面。
驾驶方式:车速在20km/h到最高车速80%间变换,向左或向右转动方向盘,达到中高侧向加速度。
评价内容:方向盘回到中间位置的表现,不应过快或过慢,超调量应小且振荡应快速衰减。
KICK BACK试验路面:中等半径沥青或水泥弯道,弯道中有碎石或小坑等。
驾驶方式:在弯道内加速使侧向加速度增大到中高g。
评价内容:中高g下方向盘是否有回敲的感觉,以及回敲感的强烈程度。
中间位置力感觉试验路面:平直路面。
驾驶方式:分别以40km/h、80km/h、120km/h的速度行驶,左右转动方向盘,转角不超过±10°。
评价内容:中间位置的转向力感觉。
转向间隙试验路面:平直路面驾驶方式:分别以40km/h、80km/h、120km/h的速度行驶,以小角度左右转动方向盘。
评价内容:感觉中间位置左右无响应的角度范围,此范围应越小越好。
直线行驶能力试验路面:平直路面。
驾驶方式:分别以40km/h、80km/h、120km/h的速度沿直线行驶,松开方向盘,并进行加速和制动,观察车辆是否跑偏。
中间位置转向操纵稳定性的参数灵敏度分析和改进中间位置指的是车辆高速行驶时在直线行使位置附近,方向盘转动范围不太大,转动速度缓慢,侧向加速度较小时的一个区域,这个操纵区域称为中间位置(on-center)。
统计结果显示,车辆在高速行驶时,驾驶员绝大多数操纵行为发生在方向盘转动范围不太大,侧向加速度较小的一个区域内,需要急打方向的紧急情况相对较少,在高速公路上尤其如此。
在评估车辆高速行驶的操纵性能时,中间位置的路感是一个非常重要的问题,汽车的很多高速操纵稳定性能指标,例如经常评价的车辆是否发飘的问题就需要在这个区域内进行评估。
另外,转向系统的非线性特性在转向过程中起着非常重要的作用,尤其是在中间位置。
因此,在研究路感各影响因素的同时,重点需要研究干摩擦、液压助力等非线性特性的影响。
评价采用的客观评价指标,主要是那些与主观性评价相关性好的中间位置操纵稳定性客观评价指标。
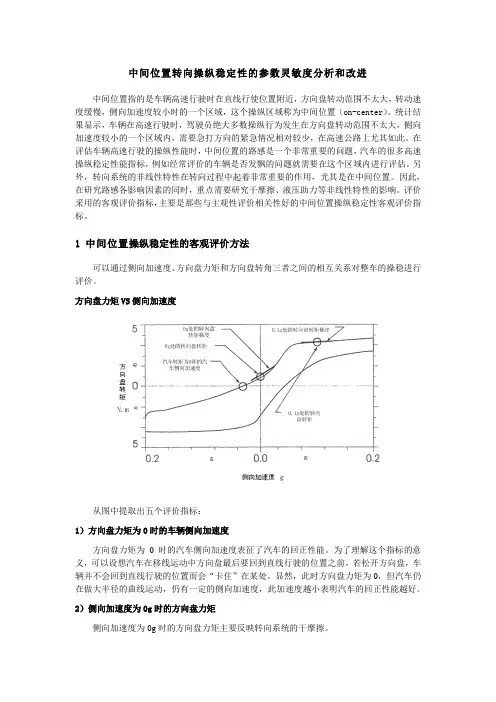
1 中间位置操纵稳定性的客观评价方法可以通过侧向加速度、方向盘力矩和方向盘转角三者之间的相互关系对整车的操稳进行评价。
方向盘力矩VS侧向加速度从图中提取出五个评价指标:1)方向盘力矩为0时的车辆侧向加速度方向盘力矩为0时的汽车侧向加速度表征了汽车的回正性能。
为了理解这个指标的意义,可以设想汽车在移线运动中方向盘最后要回到直线行驶的位置之前,若松开方向盘,车辆并不会回到直线行驶的位置而会“卡住”在某处。
显然,此时方向盘力矩为0,但汽车仍在做大半径的曲线运动,仍有一定的侧向加速度,此加速度越小表明汽车的回正性能越好。
2)侧向加速度为0g时的方向盘力矩侧向加速度为0g时的方向盘力矩主要反映转向系统的干摩擦。
3)侧向加速度为0g时方向盘力矩梯度侧向加速度为0g时的方向盘力矩梯度就是方向盘力矩随侧向加速度的变化率,表征了车辆在直线行驶时的“路感”,它主要受到主销几何参数和总传动比的影响。
在装有动力转向的车辆上,转向机阀中扭力杆的刚度、转阀的设计及转向系统摩擦都会对其产生影响。
操纵稳定性试验总结1 . 稳态回转试验测量的量:横摆角速度AngleRateDown,前进车速speed 侧倾角Angroll 汽车重心的侧偏角纵向的加速度侧向加速度试验方法:半径为15或20米的圆,缓慢而均匀的加速,直至侧向加速度达到6.5m/s2.记录整个过程,左右方向各三次。
实验开始时车身处于正中位置。
考核指标:转弯半径比特性、前后轴侧偏角差值特性、侧倾角特性(侧倾角大小)。
不足转向度U:U按前、后桥侧偏角差值与侧向加速度关系曲线上侧向加速度值为2m/s2处的平均斜率的一半计算。
车身侧倾刚度:拟合A y—(α1-α2)曲线,微分,取侧向加速等于2时的值。
.2. 转向轻便性:测量的量:转向盘作用力矩Torque、转向盘转角angel、前进车速speedforward、转向盘半径。
试验方法:驾驶员操纵转向盘,以10km/h的车速匀速沿双纽线绕8字行驶,车速稳定后开始记录方向盘转角和力矩。
汽车沿双纽线绕行一周为一次,全部试验进行三次。
考核指标:转向盘的最大作用力、力矩;转向盘(左、右)的最大转角、转向盘作用功、转向盘平均摩擦力、力矩;3. 转向回正性能测量的量:前进车速speedforward、横摆角速度AngrateDown (yaw)、侧向加速度Accellateral 试验方法:一定要使用转向盘转角开关,触发switch低速回正性能试验:在半径15米的圆上,调整车速使侧向加速度达到4m/s2,误差0.2m/s2;稳定车速开始记录,三秒后突然松开方向盘,至少记录松开后4S的汽车运动过程。
高速回正性能试验:驾驶车速为最高车速的70%,侧向加速度为2m/s2.其他同上。
试验左转、右转各三次考核指标:稳定时间、残留横摆角速度、横摆角速度超调量、横摆角速度自然频率、相对阻尼系数、横摆角速度总方差。
评分标准:按松开转向盘后3S时的残留横摆角速度绝对值Δr及横摆角速度总方差Er两项指标进行评价。
4. 脉冲测量的量:汽车前进车速speedforward、转向盘转角Angle、侧向加速度Accellateral、横摆角速度AngRatedown试验方法:以100km/h的车速直线行驶使其横摆角速度为0,然后给转向盘一个三角脉冲输入,试验时向左(或向右)转动转向盘,并迅速转会原处保持不动,记录全部过程,直至汽车回到直线行驶位置。

中华人民国国家标准汽车操纵稳定性试验方法GB/T 6323.4—94转向回正性能试验代替GB6323.4—86Controllability and stabilityTest procedure for automobiles—Returnability test1 主题容与适用围本标准规定了汽车操纵稳定性试验方法中的转向回正性能试验方法。
本标准适用于轿车、客车、货车及越野汽车,其他类型汽车可参照执行。
2 引用标准GB/T 12534 汽车道路试验方法通则GB/T 12549 汽车操纵稳定性术语及其定义3 测量变量和仪器设备3.1 测量变量a.汽车前进速度;b.横摆角速度;c.侧向加速度。
3.2 试验仪器设备3.2.1试验仪器设备应符合GB/T 12534中3.5条规定。
3.2.2各测量用仪器,其测量围及最大误差满足表1的要求。
3.2.3包括传感器及记录仪器在的整个测量系统的频带宽度不小于3Hz。
3.2.4各种传感器按各自使用说明书进行安装。
表14 试验条件4.1 试验汽车4.1.1试验汽车是按厂方规定装备齐全的汽车。
试验前,测定车轮定位参数,对转向系、悬架系统进行检查、调整和紧固,按规定进行润滑。
只有认定试验汽车已符合厂方规定的技术条件,方可进行试验。
测定及检查的有关参数的数值,记入附录A(补充件)中。
4.1.2试验时若用新轮胎,试验前至少应经过200km正常行驶的磨合;若用旧轮胎,试验终了残留花纹高度不小于1.5mm。
轮胎气压应符合GB/T 12534中3.2条的规定。
4.1.3试验汽车在厂定最大总质量(驾驶员、试验员及测试仪器质量,计入总质量)状态下进行。
货车的装载物(推荐用砂袋)均匀分布于货箱;客车的装载物(推荐用砂袋)分布于座椅和地板上,其比例应符合GB/T 12534中表1的规定。
轴载质量必须符合厂方规定。
4.2 试验场地与环境a. 试验场地为干燥、平坦而清洁,用水泥混凝土哉沥青铺装的路面,任意方向的坡度不大于2%;b. 风速不大于5m/s;c. 大气温度在0~40℃围。
汽车操纵稳定性试验解析!汽车的操稳性不仅影响到汽车驾驶的操纵方面,而且也是决定汽车安全行驶的一个主要性能;为了保证安全行驶,汽车的操稳性受到汽车设计者很大的重视,成为现代汽车的重要使用性能之一,如何试验并评价汽车的操稳性显得极其重要。
汽车操控稳定性分为两个方面:1、操控性: 指汽车能够确切的响应驾驶员转向指令的能力;2、稳定性:指汽车受到外界扰动(路面扰动或阵风扰动)后恢复原来运动状态的能力。
一、常用试验仪器1、陀螺仪:用于汽车运动状态下测动态参数,如汽车行进方位角,汽车横摆角速度,车身侧倾角及纵倾角等;2、光束水准车轮定位仪:测车轮外倾角,主销内倾角,主销外倾角,车轮前束,车轮最大转角及转角差;3、车辆动态测试仪:测汽车横摆角速度,车身侧倾角及纵倾角,汽车横向加速度与纵向加速度等运动参数;4、力矩及转角仪:测转向盘转角或力矩;5、五轮仪和磁带机等。
二、试验分类三、稳态回转试验01试验步骤1、在试验场上,用明显的颜色画出半径为15m或20m的圆周;2、接通仪器电源,使之加热到正常工作温度;3、试验开始前,汽车应以侧向加速度为3m/s2的相应车速沿画定的圆周行驶500m以使轮胎升温。
4、以最低稳定速度沿所画圆周行驶,待安装于汽车纵向对称面上的车速传感器在半圈内都能对准地面所画的圆周时,固定转向盘不动,停车并开始记录,记下各变量的零线,然后,汽车起步,缓缓连续而均匀地加速(纵向加速度不超过0·25m/s2),直至汽车的侧向加速度达到6·5m/s2为止,记录整个过程。
5、试验按向左转和右转两个方向进行,每个方向试验三次。
每次试验开始时车身应处于正中央。
02评价条件1、中性转向点侧向加速度值An:前后桥侧偏角之差与侧向加速度关系曲线上斜率为零的点的侧向加速度值,越大越好;2、不足转向度:按前后桥侧偏角之差与侧向加速度关系曲线上侧向加速度2m/s2点的平均值计算,越小越好;3、车厢侧倾度K:按车厢侧倾角与侧向加速度关系曲线上侧向加速度2m/s2点的平均斜率计算,越小越好。
汽车操纵稳定性的中间位置转向试验
王德平;侯国政;高树林
【期刊名称】《汽车技术》
【年(卷),期】2003(000)011
【摘要】操纵稳定性中间位置转向试验最初是由美国德尔福公司制定的,是汽车在高速行驶条件下操纵性和稳定性的重要评价方法.通过试验的原始数据可以绘制出转向盘转角与侧向加速度、转向盘力矩与侧向加速度、转向盘力矩与转向盘转角等多条特性曲线,以作为不同的评价指标.以CA1141载货汽车作为实例分析,发现该车转向干摩擦偏大,转向刚度偏低,高速行驶时的非线性路感不够理想.
【总页数】3页(P21-22,35)
【作者】王德平;侯国政;高树林
【作者单位】一汽集团公司技术中心;一汽集团公司技术中心;一汽集团公司技术中心
【正文语种】中文
【中图分类】U461.6
【相关文献】
1.中间位置转向试验与半挂牵引车操纵稳定性 [J], 王德平
2.转向盘中间位置操纵稳定性试验研究 [J], 许庆卫
3.分布式驱动电动汽车动力转向系统切换控制及其操纵稳定性试验 [J], 刘海妹;冯俊萍;倪彰
4.应用于汽车操纵稳定性试验的转向机器人控制器设计 [J], 朱长顺;赵永升;罗石;
杨钢;沈成
5.应用于汽车操纵稳定性试验的转向机器人控制器设计 [J], 朱长顺;赵永升;罗石;杨钢;沈成;
因版权原因,仅展示原文概要,查看原文内容请购买。