空间轨迹
- 格式:ppt
- 大小:6.09 MB
- 文档页数:25

空间圆弧轨迹引言空间圆弧轨迹是一种在三维空间中描述物体运动或路径的方式。
它在许多领域中都有广泛的应用,如机械工程、航空航天等。
本文将介绍空间圆弧轨迹的基本概念、计算方法和应用。
基本概念空间圆弧轨迹是指物体在三维空间中运动时,运动轨迹为圆弧形状的情况。
它由切线和曲率确定了其形状和方向。
切线是指该点处运动轨迹的切线方向,曲率则表示了该点处圆弧的曲率大小。
计算方法计算空间圆弧轨迹的方法主要有两种:几何方法和数学方法。
几何方法几何方法是通过已知圆弧的起点、终点和半径来计算圆弧轨迹。
具体步骤如下: 1. 确定起点、终点和半径; 2. 根据已知条件绘制圆弧的切线; 3. 确定圆弧的中心点; 4. 根据中心点和起点绘制圆弧。
数学方法数学方法是通过方程计算空间圆弧轨迹的参数。
具体步骤如下: 1. 建立圆弧的参数方程; 2. 将参数代入方程,求解圆弧上各点的坐标。
应用领域空间圆弧轨迹在许多领域中都有广泛的应用。
机械工程在机械工程中,空间圆弧轨迹被用于描述机械臂的运动路径。
机械臂可以根据空间圆弧轨迹来完成复杂的动作,如拾取物体、组装产品等。
航空航天在航空航天领域,空间圆弧轨迹被用于描述飞机或火箭的飞行路径。
通过研究和计算空间圆弧轨迹,可以优化飞行路径,提高飞行效率。
三维建模在三维建模领域,空间圆弧轨迹被用于生成和编辑三维模型的路径。
通过控制圆弧轨迹的参数,可以实现复杂的三维动画效果。
优点和局限性空间圆弧轨迹具有以下优点: - 简洁:空间圆弧轨迹可以用较少的参数来描述复杂的运动路径。
- 平滑:圆弧轨迹具有平滑的曲线,可以避免物体在运动过程中产生突变或抖动。
然而,空间圆弧轨迹也有一些局限性: - 限制:圆弧轨迹只能描述圆弧形状的路径,对于其他形状的路径无法准确表示。
- 计算复杂:计算空间圆弧轨迹的参数需要一定的数学知识和计算能力,对于非专业人士可能有一定的难度。
结论空间圆弧轨迹是描述物体运动和路径的一种重要方式,具有广泛的应用领域。

空间目标运动轨迹预测研究随着人类对太空的探索日益深入,各国不断发射卫星和太空探测器,对于空间目标的运动轨迹预测就显得尤为重要。
空间目标指的是在太空中运行的各种天体,包括人造卫星、空间舱、宇宙飞船和天体物体等。
在进行太空任务和科学研究时,对空间目标的位置和运动状态进行准确预测、分析和控制,是确保任务成功的重要保证。
一、空间目标运动轨迹预测的重要性空间目标的运动是受到多种因素共同作用的,如引力、气动力、地球潮汐以及外部干扰等。
这些因素的复杂性和难以精确测量,使得空间目标的轨迹具有随机性,因此需要使用严谨的数学模型和先进的技术来进行预测。
空间目标的运动轨迹预测的重要性在于,它能够实现以下几个方面的目标:1.保障空间任务的成功完成: 在进行空间任务时,准确地预测目标在太空中的位置和运动状态可以帮助调整任务的航向和速度,从而确保任务的成功完成。
2.提高空间探测的效率和精度: 进行空间探测需要对目标所在的位置和运动状态有较为准确的了解,这可以帮助科学家准确采集和分析相关数据,并提高探测的效率和精度。
3.保障空间安全: 空间目标的轨迹预测还可以帮助维护空间相对安全的环境,对于行星、人造卫星和太空垃圾等物体的相对运动分析、跟踪和预警都有积极的作用。
二、空间目标运动轨迹预测的数学模型空间目标运动轨迹预测需要使用数学模型来描述其运动规律和状态变化。
目前,常用的数学模型包括开普勒模型、矢量计算模型、质点模型等。
1.开普勒模型开普勒模型最早是由德国天文学家开普勒在16世纪提出的,是用来描述天体运动的三大定律中的第一定律:行星轨道是椭圆。
在开普勒模型中,用平面直角坐标系x、y来描述目标的位置,用它的径向速度vr和角速度ω来描述目标的运动状态。
开普勒模型可以较好地描述天体围绕中心星的椭圆轨道运动。
2.矢量计算模型矢量计算模型是通过对目标的速度和加速度进行矢量叠加来计算目标的新位置。
在矢量计算模型中,将时间连续化,建立速度和加速度矢量模型,并利用牛顿运动定律进行计算预测。
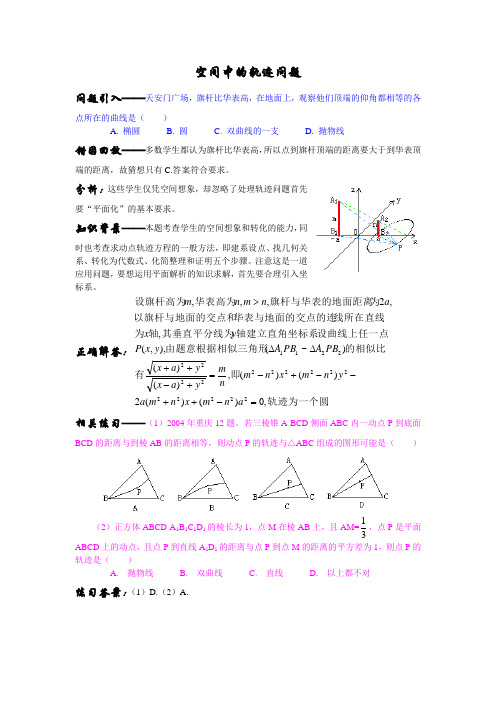
空间中的轨迹问题问题引入——天安门广场,旗杆比华表高,在地面上,观察他们顶端的仰角都相等的各点所在的曲线是( )A. 椭圆B. 圆C. 双曲线的一支D. 抛物线错因回放——多数学生都认为旗杆比华表高,所以点到旗杆顶端的距离要大于到华表顶端的距离,故猜想只有C.答案符合要求。
分析:这些学生仅凭空间想象,却忽略了处理轨迹问题首先要“平面化”的基本要求。
知识背景——本题考查学生的空间想象和转化的能力,同时也考查求动点轨迹方程的一般方法,即建系设点、找几何关系、转化为代数式、化简整理和证明五个步骤。
注意这是一道应用问题,要想运用平面解析的知识求解,首先要合理引入坐标系。
正确解答:.,0)()(2)()(,)()()~(),,(.,,2,,,2222222222222222211轨迹为一个圆即有的相似比由题意根据相似三角形设曲线上任一点轴建立直角坐标系其垂直平分线为轴为线所在直线华表与地面的交点的连以旗杆与地面的交点和为旗杆与华表的地面距离华表高为设旗杆高为=-++--+-=+-++∆∆>a n m x n m a y n m x n m n m y a x y a x PB A PB A y x P y x a n m n m相关练习——(1)2004年重庆12题。
若三棱锥A-BCD 侧面ABC 内一动点P 到底面BCD 的距离与到棱AB 的距离相等,则动点P 的轨迹与△ABC 组成的图形可能是( )(2)正方体ABCD-A 1B 1C 1D 1的棱长为1,点M 在棱AB 上,且AM=31,点P 是平面ABCD 上的动点,且点P 到直线A 1D 1的距离与点P 到点M 的距离的平方差为1,则点P 的轨迹是( )A. 抛物线B. 双曲线C. 直线D. 以上都不对练习答案:(1)D.(2)A.。

物体在空间中的运动轨迹物体在空间中的运动轨迹是指物体在三维空间中的路径,通过分析和描述物体在空间中的运动轨迹,我们可以揭示物体的运动规律和其所受到的力的作用。
物体的运动轨迹可以是直线、曲线、圆周等形式,而运动轨迹的性质则受到物体的初速度、加速度、重力等因素的影响。
首先,让我们来探讨物体在空间中的直线运动轨迹。
当物体在空间中做直线运动时,其轨迹可以是一条直线或是由多条直线段组成。
物体的直线运动可以是匀速运动,也可以是加速运动。
在匀速直线运动中,物体在每个相等的时间间隔里都移动相等的距离,轨迹呈现直线形式。
而在加速直线运动中,物体的速度随着时间的推移而改变,轨迹可能是由直线段和曲线段组成。
其次,让我们讨论物体在空间中的曲线运动轨迹。
曲线运动轨迹可以是抛物线、椭圆、双曲线等各种形状。
例如,当我们将一个小球投掷到空中时,小球会沿着抛物线运动轨迹下落。
这是因为小球在空中受到重力的作用,所以其运动轨迹呈现曲线形式。
曲线运动的轨迹可以通过数学公式来描述,通过解析几何和微积分的方法,我们可以求解物体在空间中的曲线运动轨迹方程,进一步研究其运动规律。
此外,圆周运动也是一种常见的物体在空间中的运动轨迹。
圆周运动是指物体围绕圆心做圆周运动,轨迹呈圆形。
例如,地球围绕太阳做公转运动,其轨迹是一个椭圆。
圆周运动可以通过半径、角速度等参数来描述,通过研究物体在圆周运动中的运动规律,我们可以深入了解物体的运动特性。
除了以上几种常见的运动轨迹,物体在空间中的运动还可能呈现其他形式的轨迹,如螺旋线、心形线等。
这些非常规的轨迹形式经常出现在复杂的物理现象中,例如质点在电磁场中的运动。
对于非常规的轨迹形式,我们需要借助高级的数学和物理工具进行分析和探索。
总结起来,物体在空间中的运动轨迹丰富多样,可以是直线、曲线、圆周甚至是非常规的形式。
通过研究和分析物体在空间中的运动轨迹,我们可以揭示物体的运动规律和其所受到的力的作用。
物体的运动轨迹可以通过数学公式来描述和计算,这为我们深入了解物理规律和实验现象提供了关键的方法和工具。

空间轨迹问题的三种模式及破解策略空间轨迹问题是近年来高考命题的一个热点题型,这类问题中涉及到的点,线,面较多,产生于空间,但落实到平面,空间关系复杂,往往交汇多个知识点,解题方法灵活多变,总给人无“法”可依,无“章”可循之感,是同学们公认的难点与失分点。
本文将此类问题分为三种模式,各个击破,只要同学们能够准确识别模式就能正确解决,对空间轨迹问题我们的口号是“无需忍痛——分必得!”【模式一】 定点+动点型——先定“大轨迹”,后寻“小轨迹”,特殊点定位例1 在正方体1AC 中,点P 在侧面11BCC B 的内部及边界上运动,总有1AP BD ⊥,则点P 的轨迹是( )A. 线段1B CB. 线段1BCC. 线段BCD. 线段11B C分析: 我们知道过直线外一点与该直线垂直的直线都在过该点与此直线垂直的平面内,设过A 与1BD 垂直的平面为α,有11P B C CB α∈平面,所求轨迹就是α与侧面11BCC B 的交线,此处应是线段,下面只需要取两个特殊点定位即可,易知只有线段1B C 符合题意,故选A.例2 已知正方体1AC 棱长为1,在正方体表面上与点A 距离为3的点的集合曲线C ,则该曲线的长度为( )A. B. C. D.解:空间中与A 的点的集合是以A 为球心,曲线C 就是该球面与正方体各面相交所得的截面。
2313<<6个侧面均相交得到6段圆弧,可分为两种情况:ABCD,11AA D D , 11AA B B 为过球心的截面,截痕为大圆弧,易知三段圆弧圆心角均为6π;1111A B C D ,11BCC B ,11CDD C 与球心距离为1的截面,截痕是小圆弧,三段小3=,故各段圆弧圆心角均为2π,则曲线C 长度为 233533363236ππ+= 方法点拨此模式中我们可以先确定动点所在的“大轨迹”(某个平面或球面),而所求的“小轨迹”往往是“大轨迹”与一个指定平面的交线,我们熟知平面与平面或球面相交,交线是直线或圆,轨迹类型确定了,就可以取特殊点来确定即可,问题迎刃而解!【模式二】 动点+多距离型,转化为一个平面内的轨迹问题例3 如图,在正方体1AC 中,P 是侧面11BCC B 内一动点,若P 到直线BC 与直线11C D 的距离相等,则动点P 的轨迹所在曲线是( )A.直线B.圆C.双曲线D.抛物线解:连接1PC ,易知1PC 即P 到直线11C D 的距离,所以在平面11BCC B 内,动点P 到点1C 的距离与其到定直线BC 的距离相等,故其轨迹所在曲线是以1C 为焦点,直线BC 为准线的抛物线,选D例4 正四面体S-ABC ,动点M 在侧面SBC 内部及边界上运动,且点M 到点S 的距离与其到底面ABC 的距离相等,则动点M 的轨迹所在曲线是( )A. 直线B. 抛物线C. 椭圆D.双曲线分析:过M 作MO ABC ⊥平面,过O 作ON BC ⊥,连接MN,易知MNO ∠是二面角S B C A --的平面角,由SM=MO,sin MO MN MNO =∠,可得sin (1SM MNO MN=∠<定值),在平面SBC 内,动M 到定点S 的距离与其到定直线BC 的距离之比是大于0小于1的常数,故M 的轨迹应该是椭圆的一部分,故选C方法点拨与模式一对比,我们无法确定“大轨迹”,因此需要转化。
关节空间轨迹的插值计算关节空间轨迹的插值计算是指根据给定的关节空间点集,通过插值算法计算出连续的关节空间轨迹。
这在机器人运动学和路径规划中是一个重要问题。
下面将介绍几种常用的插值方法。
1. 线性插值:线性插值是最简单的插值方法之一。
假设有两个关节空间点A和B,我们可以通过线性插值来计算它们之间的关节空间轨迹。
具体做法是将关节空间轨迹分为若干段,每段之间的关节空间点根据时间进行线性插值。
线性插值的优点是简单易理解,计算速度快。
但是由于插值结果是一条直线,无法满足复杂的路径要求。
2. 二次插值:二次插值是一种更加平滑的插值方法。
它假设关节空间轨迹是一个二次曲线,可以通过三个相邻的关节空间点来确定。
具体做法是根据给定的三个点,使用二次函数来表示路径,然后再根据路径的参数化形式计算出关节角度。
二次插值的优点是插值结果光滑,相比线性插值更适合实际机器人运动。
3. 样条插值:样条插值是一种更加灵活的插值方法。
它假设关节空间轨迹是由多段特定形状的曲线拼接而成。
具体做法是将关节空间轨迹划分为若干小段,每段之间拼接成一条曲线。
在每个小段内,通常使用三次多项式函数来表示。
样条插值的优点是可以通过控制拼接点的位置和曲线形状来满足不同的路径要求。
但是由于样条插值需要计算大量的参数来确定曲线形状,在计算量上较大。
4. 逆运动学插值:逆运动学插值是一种特殊的插值方法,适用于已知起点和终点的运动轨迹,而不是在关节空间定义的轨迹。
逆运动学插值的目的是根据起点和终点在笛卡尔坐标系中的坐标,计算出机器人每个关节的角度,从而使得机器人能够从起点运动到终点。
逆运动学插值的难点在于需要解决逆运动学问题,即通过关节角度计算末端执行器在笛卡尔坐标系中的位置。
综上所述,关节空间轨迹的插值计算可以使用线性插值、二次插值、样条插值和逆运动学插值等方法。
选择哪种方法要根据实际需求来确定。
在实际应用中,通常需要综合考虑插值结果的光滑度、计算复杂度和路径要求等因素。
笛卡尔空间轨迹拟合
笛卡尔空间轨迹拟合是指根据给定的一系列离散笛卡尔空间轨迹点,通过拟合方法得到合理的连续轨迹函数。
拟合方法可以根据实际需求选择,常见的方法有多项式拟合、样条曲线拟合、参数化曲线拟合等。
多项式拟合常用于低维离散点的拟合,可以通过最小二乘法或最小二范数等方法求解出最佳拟合曲线的系数。
样条曲线拟合是指将一条光滑曲线分段拟合成多个多项式片段,并保证同一段内的多项式片段之间连续和光滑。
常见的样条曲线拟合方法有线性样条、二次样条、三次样条等。
参数化曲线拟合是指将笛卡尔空间轨迹点映射到一个参数化的曲线上,通过优化参数值来拟合原始轨迹。
常见的参数化曲线拟合方法有贝塞尔曲线拟合、B样条曲线拟合等。
在进行轨迹拟合时,需根据实际应用场景选择合适的拟合方法和参数,以达到拟合效果和计算效率的要求。
同时,也需要考虑拟合后的轨迹是否满足要求,如是否平滑、连续、符合运动学限制等。