接触网参数检测技术
- 格式:ppt
- 大小:41.93 MB
- 文档页数:110
接触网拉出值智能检测方法摘要电力机车受电弓在规定范围内对接触线滑动接触,拉出值是影响受电弓平滑取流的关键因素。
需要对接触网拉出值的状态进行智慧化、智能化的检测。
通过信息化手段进行实时检测为拉出值的调整提供及时的调整信息。
关键词:接触网拉出值检测引言接触网是沿铁路上空架设的一条特殊形式的输电线路。
在轨道上空呈“之”字形架设,其主要功能是提高受电弓使用寿命,保证受电弓与接触线的良好接触和平滑取流。
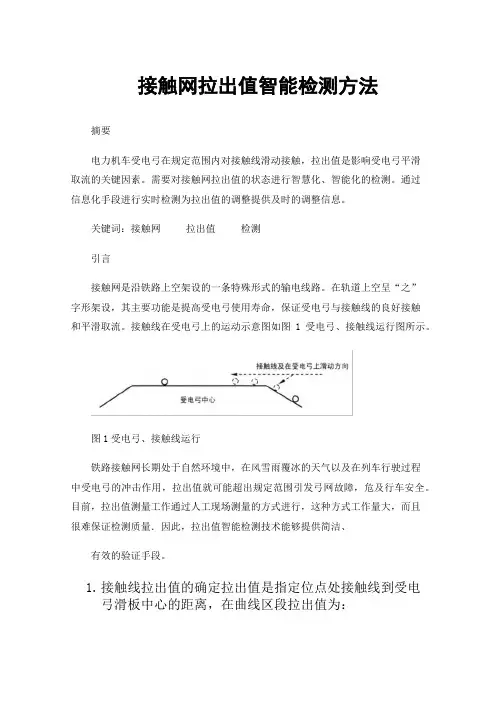
接触线在受电弓上的运动示意图如图1受电弓、接触线运行图所示。
图1受电弓、接触线运行铁路接触网长期处于自然环境中,在风雪雨覆冰的天气以及在列车行驶过程中受电弓的冲击作用,拉出值就可能超出规定范围引发弓网故障,危及行车安全。
目前,拉出值测量工作通过人工现场测量的方式进行,这种方式工作量大,而且很难保证检测质量.因此,拉出值智能检测技术能够提供简洁、有效的验证手段。
1.接触线拉出值的确定拉出值是指定位点处接触线到受电弓滑板中心的距离,在曲线区段拉出值为:a=m+c(1)c=h×H/L(2)式中:a为接触线拉出值(单位:mm);m为定位点处接触线到线路中心的水平距离;c为定位点处受电弓中心到线路中心的水平距离;h为外轨超高;H为接触线高度;L为轨距。
接触线的拉出值是行车安全的重要因素之一。
由式(1)和式(2)可知,根据以上公式所确定的拉出值在动态取流的情况下常拉出值发生变化情况。
采用智能检测技术可作为一种预警手段,预防行车故障发生,提高行车安全效率。
1.拉出值智能检测模块设计2.1接近传感器应用原理接近传感器是代替接触式检测式检测方法,无需接触被检测对象为目的的传感器的总称,它能检测对象的位移以及把采集信息并转化成电信号。
是广泛用于测量位移、速度、加速度的测量。
对接触网拉出值测量,难点在于需在接触网的接触线与受电弓接触下进行,目前现有传感器和匹配的处理系统体积均过大,造成很多标准传感器无法在接触网定位器上安装使用。


接触网常用参数标准及测量计算接触网常用参数标准及测量计算一、拉出值(跨中偏移值)1、技术标准160km/h及以下区段:标准值:直线区段200-300mm;曲线区段根据曲线半径不同在0-350mm之间选用。
安全值:之字值≤400mm;拉出值≤450mm。
限界值:之字值450mm;拉出值450mm。
160km/h以上区段:标准值:设计值。
安全值:设计值±30mm。
限界值:同安全值。
2、测量方法利用DJJ多功能激光接触网检测仪进行拉出值测量:受电弓滑板平面与两钢轨平面平行,检测仪与两钢轨平面平行,测量时无需考虑外轨超高,直接校准定位点在检测仪上的投影位置,此位置与检测仪中心点的距离就是拉出值。
二、导线高度1、技术标准标准值:区段的设计采用值。
安全值:标准值±100mm。
限界值:小于6500mm;任何情况下不低于该区段允许的最低值。
当隧道间距不大于1000m时,隧道内、外的接触线可取同一高度。
2、测量方法利用DJJ多功能激光接触网检测仪进行导高测量:将测量仪置于两钢轨之上与两轨面平行,利用测量仪上的观察窗校准定位点位置,测出定位点至两轨面的垂直距离即为导高。
三、导线坡度及坡变率1、技术标准标准值: 120km/h及以下区段≤3‰;120-160km/h区段≤2‰;200km/h区段≤2‰,坡度变化率不大于1‰;200-250km/h区段≤1‰,坡度变化率不大于1‰。
安全值:120km/h及以下区段≤5‰;120-160km/h区段≤4‰。
其他同标准值。
限界值:120km/h及以下区段≤8‰;120-200km/h区段≤5‰;200km/h及以上区段同安全值。
160km/h及以上区段,定位点两侧第一根吊弦处接触线高度应相等,相对该定位点的接触线高度允许误差±10mm,但不得出现V字型。
2、测量与计算方法定位点A与定位点B之间的坡度测量:1、测出A点的导高h a;2、测出B点的导高h b;3、测出或计算出A、B之间的距离H;4、计算出A、B两点之间的导线坡度P ab=(h b -h a)/H×1000‰;5、将P ab记入定位点B的导线坡度P b,即P ab=P b。
地铁接触网状态检测技术浅析摘要:随着我国地铁事业的发展,列车速度的加快,地铁接触网检测技术也随之被广泛应用。
接触网检测技术是地铁运行中的重要措施之一,目的在于保证列车安全行驶。
接触网检测项目主要包括几何参数测量,离线检测,网压检测,弓网接触压力检测,弓网冲击检测等等。
本文介绍了各种接触网检测方式,指出利弊,并提出各项检测方式中存在的问题和需要注意的地方。
关键词:接触网检测,检测方式,动态测量,检测车1引言地铁接触网是其构成中的重要部分。
接触网是供电设备,它的主要作用是为列车提供电能与动力,不仅要保证向列车正常提供电流,还要保证接触悬挂能稳固的处在规定空间的位置上。
因为受电弓有一定宽度,而且列车速度很快,如果参数发生变化,就可能发生接触网和受电弓的故障。
如果收到外部的作用影响,发生过热的情况,就有可能中断供电,导致列车停止运行。
因此需要随时对接触网进行检测,检修与维护,才能够保证它处于正常状态,正常供电,正常为列车提供动力。
2 接触网测量方式因为接触网跨距弹性不均匀,受电弓的惯性力等因素影响,受电弓与接触线会有离线现象发生。
接触网检测包括测量“接触网几何参数”(接触线高度,接触线高度差,拉出值,等等)和“硬点”(列车高速运行时受电弓在垂直方向的振动和冲击值),掌握接触网状态,以便及时检修,维护设备,而保证地铁供电系统的正常工作,保证地铁道路安全运营。
测量地铁接触网,不同时期产生了不同的测量方法。
主要有静态测量,接触式检测方式,非接触式激光雷达扫描测量法,非接触式图像测量法,地铁网轨检测车。
2.1 静态测量静态测量就是测量地铁接触网接触悬挂各个部位的静态尺寸,主要是测量“接触线高度”,“抬升值”以及“之字值”,静态检测可以检验出接触网是否按照设计要求设计,是否完全符合设计标准。
静态测量的局限性就在于: 静态测量只能够反映接触网的静态位置。
而接触网安装使用后,经过一定的时间,要检查它的几何尺寸是否符合了设计给出的数据标准。
基于机器视觉的接触网几何参数检测方法王延良;游诚曦;刘宝轩【摘要】提出了一种基于机器视觉技术的接触网几何参数检测方法。
检测过程中,通过线阵相机对锚段关节、支柱等关键零部件的识别,实现检测数据精确定位,同时采用振动补偿技术消除由检测车体振动所造成的检测误差。
检测结果表明,该方法能够有效地提高接触网动态几何参数检测精度,具有实际意义。
%A method is proposed based on machine vision technology for catenary geometricalpa-rameters detection.The test data precise positioning is realized by the identification of the ancho-ring section,pillars and other key components.And errors caused by the detector body vibration are eliminated by vibration compensation technology.Results show that this method can effective-ly improve the dynamic geometry detection accuracy.【期刊名称】《兰州交通大学学报》【年(卷),期】2014(000)001【总页数】5页(P192-195,200)【关键词】机器视觉;线阵CCD相机;接触网几何参数;检测【作者】王延良;游诚曦;刘宝轩【作者单位】广州铁路集团公司供电处,广东广州 510088;广州铁路集团公司供电处,广东广州 510088;西南交通大学电气工程学院,四川成都 610031【正文语种】中文【中图分类】TP391接触网是与电气化铁路安全运营直接相关的架空设备,沿线架设且无备用,工作环境恶劣,接触网故障在电气化铁路设备故障中所占的比例很大.发现并解决接触网中存在的安全隐患,对于保障电力机车正常运行,避免重大事故发生具有重要意义.接触网检测包括接触网几何参数和动力学参数的检测.接触网几何参数主要有导高、拉出值、定位管坡度、线岔和接触线磨耗等,是评估受流性能优劣的重要指标[1-2].接触网几何参数检测对于指导现场维护,保障机车安全运营起到了不可替代的作用.德国接触网检测技术偏重于对接触压力与硬点检测,能够实现动力学参数准确测量,对弓网接触状况做出评判;但对拉出值检测结果误差较大、定位管坡度不能检测[3-4].国内对于接触网几何参数检测,先前主要采用人工巡视方法;目前大多采用车载在线测试等接触式检测方法实现接触网几何参数的巡查、检测,检测效率较低.文献[5]研制出一种便携式接触网几何参数激光测量仪,能够实现对接触网静态几何参数测量;但测量周期较长,无法短时间内完成整条检测线路接触网几何参数测量.针对上述检测技术现状,本文提出了一种基于机器视觉技术的检测方法,采用线阵相机对拉出值、导高和定位管坡度等接触网几何参数进行实时、动态和非接触检测.检测结果表明,该方法能够有效实现对拉出值和定位管坡度等几何参数精确检测,同时较文献[5]方法比,大大提高了检测速度.基于机器视觉的检测设备对接触网几何参数的检测原理如图1所示.图1中K1,K2,K3和K4为采用加拿大DALSA生产的S系列线阵CCD扫描相机,其线阵相机频率为2 kHz,线率为2 048像素,点阵大小为0.014 mm,动态检测过程中实现不大于15 mm等间距检测数据采样.线阵相机K1与K2,K3与K4两组分别构成对一个目标的捕获识别系统,通过三角测量法,获取接触网特征位置,并以灰度值形态呈现,再借助图像识别、分析和处理等技术,将相机获取的灰度值还原为目标成像所对应的位置坐标,从而实现接触网几何参数的非接触式检测.图1中,S1,S2和S3为大功率红外激光光源,便于夜间检测目标的捕获,通过增加镜头前面的滤光片,能够有效改变检测目标与背景的对比度,利于目标提取.检测装置安装于检测车车顶,相机安装角度及其距车顶中心线距离,根据被检测线路(地铁、普铁)不同而不同.无强太阳光直射情况下,由左、右两台线阵相机即可完成对被检测目标几何参数测量,为避免太阳光直射干扰,采用4台线阵相机两两对称安装方式实现对检测目标的检测.左、右两线阵相机检测几何参数原理如图2所示.图2中,左相机安装角度为α1,焦距f1;右相机安装角度为α2,焦距f2;左相机中心线与其成像面交点为C1,右相机中心线与其成像面交点为C2.两相机距离d,角Sl-Ol-xl负轴角度为β1,角Sr-Or-xr负轴角度为β2;到目标距离x即为初始拉出值,y即为初始导高值.左相机成像点Sl到其成像面中心点C1距离为l1;右相机成像点Sr到其成像面中心点C2距离为l2.借助机器视觉技术分析可得左相机成像点Sl在左相机成像面中位置,从而可得左相机成像点Sl到其成像面中心点C1距离l1;同理可得l2.由几何关系可知:由三角形对顶角及角间关系可得由边角关系可得从而计算得到拉出值初始值x、接触线初始导高y:同样,基于上述原理,可实现对定位管坡度、线岔和接触线磨耗等其他接触网几何参数的检测.接触网检测系统主要由车顶设备、车内设备和车底设备三部分组成.车顶设备主要由基于机器视觉的非接触式检测设备、弓网图像监控设备等组成;车内设备主要由中央主机系统、客户端和数据库等组成;车底设备主要由速度传感器、速度处理模块以及振动补偿设备组成,系统结构如图3所示.图3中,基于机器视觉的非接触式检测系统用于接触网几何参数的在线检测,检测数据结果与弓网监控录像采用高速字幕合成技术进行实时字幕合成叠加,输出到显示器,图文并茂,便于观察,同时将检测结果准确定位,便于指导现场维护. 运行中的车体是具有弹簧悬挂装置的多自由度振动系统[6-7].轨道存在的各种波长的随机不平顺激扰,车辆启动、制动和过弯道等都会引起车体振动,动态检测过程中,车体振动必然会对接触网几何参数检测结果带来误差;因此,需要构建车体补偿系统对检测结果进行修正.2.1 检测数据定位传统接触网检测数据定位采用轮径定位方式,由于轨道检测车行进过程中轮轨间存在空转和滑行现象[8],造成定位数据存在累计误差,随着检测距离的增加该误差值越来越大.基于机器视觉的接触网几何参数检测系统,在对接触网几何参数在线检测的同时,能够对接触网沿线特征点如定位管、腕臂、锚段和线岔等沿线辅助定位信息实时识别(定位管识别效果如图4所示),结合轨道移频信号与LKJ信号相结合的方式,在接触网定位管及轨道绝缘节处消除累计误差,从而实现检测数据的实时同步定位,极大程度地提高了接触网检测定位精度.2.2 车体振动与补偿接触网检测车体振动会对接触网几何参数检测结果带来误差,在曲线或缓和曲线区段,车体振动对接触网几何参数检测结果带来的误差则更加明显,图5为检测车体在曲线区段运行图.在接触网检测车底安装检测惯性包、激光摄像式传感器和加速度传感器(如图6所示),能够对车体横摆振动和侧滚振动进行振动补偿,消除由此造成的检测误差.其中,检测惯性包封装有加速度传感器、倾角仪和陀螺仪等各类传感器,其补偿原理与机器视觉检测原理相同.图7为振动补偿装置安装图.激光摄像传感器安装于检测车底,成一定角度拍摄各自相邻侧钢轨.静态时,对拍摄的钢轨图像进行数字图像处理和轨距特征点提取,计算此时相机距离各自相邻侧钢轨轨距点的水平距离和垂直距离,并将此时的水平距离和垂直距离作为静态定标量;动态检测时,通过实时提取钢轨轨距点的方法,得到任意时刻相机位置相对于轨距点的水平和垂直偏移量.动态水平(垂直)偏移量和静态水平(垂直)定标量的差值,即为车体运行时相对于静态定标位置的水平(垂直)偏移量.利用振动补偿系统,对检测结果进行修正,有效地减少了由车体振动带来的测量误差,提高了接触网几何参数检测精度.基于机器视觉技术,构建接触网几何参数检测系统,将该检测系统安装于接触网检测车上,采用该检测系统对津秦客专线路接触网几何参数进行试验检测.检测车速为100 km/h,数据处理软件界面如图8所示.检测过程中,采用机器视觉技术与接触式检测方法,同步实时在线对试验线路进行检测.检测数据同步输入至上位机,数据显示如图9所示.将两种检测方式下测量得到的平行线距离、关节接触线高差、线岔和锚段关节线间距、跨距高差等参数采用相同数据处理方法,分别统计其检测误差,如表1所示.同时该检测方法实现了对于定位器坡度的定性检测,即能够明确判定其是否工作在正常范围1/10~1/5内.由表1可知,采用基于机器视觉测量方法,接触网主要几何参数测量误差明显小于接触式测量方式,验证了该方法的准确性.将机器视觉技术用于接触网几何参数检测中,替代接触式检测方式,能够对接触网几何参数实现快速而精确的检测.借助对接触网特征点的识别,提高了检测数据定位精度;采用振动补偿技术,消除了检测车体振动对检测结果造成的影响.检测结果表明,该方法能够有效地减小接触网几何参数测量误差,提高检测精度.【相关文献】[1]何华武.高速铁路运行安全检测监测与监控技术[J].中国铁路,2013(3):1-7.[2]段汝娇,赵伟,黄松岭,等.基于计算机视觉的接触网定位器倾斜度自动测量方法[J].中国铁道科学,2011,32(4):82-87.[3]Yu J,Wu M L.Development of a detection system for the catenary vibration monitoring[C]// 2011 International Conference of Information Technology,Computer Engineering and Management Sciences.Nanjing:IEEE Press,2011,1:76-79.[4]牛大鹏.非接触式接触网几何参数检测系统研究[D].成都:西南交通大学,2008.[5]陈忠斌,周燕芳,韦宝泉.便携式接触网几何参数激光测量仪的研制[J].传感器与微系统,2013,32(4):103-105.[6]刘涛.接触网几何参数振动补偿系统研究[D].成都:西南交通大学,2008.[7]占栋,于龙,肖建,等.基于计算机视觉的接触轨检测车振动补偿方法及应用[J].铁道学报,2013,35(1):25-30.[8]占栋,陈唐龙.基于线阵相机的接触轨几何参数动态检测系统[J].现代城市轨道交通,2012(1):41-43.。
⾼速铁路接触⽹检测技术分析2019-07-02摘要:⾼速铁路接触⽹是铁路运输中不可缺少的组成部分,随着⾼速铁路规模的逐渐扩⼤,接触⽹对检测技术有⼀定的要求,⽬的是保障⾼速铁路的安全运⾏,进⽽提⾼铁路运输的效率。
⽂章探讨了⾼速铁路接触⽹的检测技术。
关键词:⾼速铁路;接触⽹;检测技术;铁路运输;运输效率⽂献标识码:A中图分类号:U238 ⽂章编号:1009-2374(2017)03-0110-02 DOI:10.13535/ki.11-4406/n.2017.03.048⾼速铁路接触⽹在使⽤的过程中,是处于⼒与电⼒共同作⽤下的,接触⽹最容易发⽣的是机械与电⽓烧伤故障,增加了接触⽹的运⾏风险,导致⾼速铁路不能正常的运营,直接产⽣了安全威胁。
为了提升⾼速铁路接触⽹的运⾏效率,采取检测技术,促使检测技术渗透到接触⽹的运营中,把控接触⽹的实践过程,最主要的是通过检测技术,监控⾼速铁路中的接触⽹性能,避免接触⽹发⽣安全或性能问题。
⾼速铁路接触⽹的检测技术,需要遵循⾼安全、⾼响应的要求,落实全⾯的检测技术,保证⾼速铁路接触⽹的有效运⾏。
1 ⾼速铁路接触⽹检测技术分析⾼速铁路接触⽹检测技术采⽤了微型计算机控制,配合先进检测、试验检测的⽅法,监控接触⽹的运⾏状态,确保接触⽹能够向⾼速铁路安全供电。
接触⽹检测使⽤的试验设备,直接安装在检测车内,利⽤车顶受电⼸的感应器,配合监视装置,将接触⽹的检测信号输⼊到列车的微机系统内,实⾏数据处理,输出设备会将最终的检测信息打印出来,⽅便结果分析。
检测技术具有⾃动化、数字化的特征,直接提⾼了⾼速铁路接触⽹的运⾏⽔平,采⽤检测技术,规范好⾼速铁路接触⽹的运⾏环境,避免发⽣检测上的问题,促使检测技术在接触⽹中可以发挥有效的作⽤,完善接触⽹的运⾏过程。
本⽂主要分析⾼速铁路接触⽹检测技术的相关装置。
1.1 检测接触线拉出值接触线的拉出值,检测时模拟车顶受电⼸滑板的⼯作范围,安装好检测器,检测器不能直接与接触线连接,需要借助电磁感应,检测拉出值的数据,微电⼦接近接触线时,就会有感应电流,输出电压信号,此类检查装置,不会受到环境因素的⼲扰,检测器每隔20mm,逐步安装在受电⼸中⼼的两侧位置,将距离中⼼的第10个检测器,信息代码传送到微型计算机,在变换处理的条件下,就能获取最终接触线的拉出值,结果为200。
铁路接触网主要部件检测方法摘要:接触网作为铁路机车受电弓的重要组成部分,在铁路运输中承担着电能传输的重要作用。
接触网的作用是将直流高压电,通过受电弓上的受电弓转换为低压直流电,供列车运行使用。
在铁路运输过程中,接触网容易出现问题,进而影响铁路运输安全。
接触网检测技术作为接触网安全运行的重要保障技术之一,对铁路接触网的安全运行有着重要的作用。
本文主要介绍铁路接触网主要部件检测方法,为铁路接触网管理人员提供参考。
关键词:铁路接触网;主要部件;检测方法引言:接触网是电气化铁路的主要组成部分,其主要功能是将电力机车的电能转化为机械能,为列车提供运行所需的动力。
接触网的作用是将高压交流电通过导线与电力机车或其他电力设备相连,以保证电能能够顺利地输送到需要供电的地方。
接触网在运营过程中,受电弓、接触线、承力索等部件易产生疲劳磨损,进而引起断线、脱轨等故障。
接触网主要部件检测是保障电气化铁路安全运营的重要工作,是一项重要而又复杂的工作。
由于接触网的运行环境恶劣,加之设备使用年限较长、设备老化等原因,造成其零部件的损坏越来越严重,严重影响了电气化铁路正常运营。
一、受电弓受电弓作为接触网的一部分,是连接接触网和机车的关键部件。
受电弓主要包括弓体、传动机构、滑板和受电弓底座等部分。
在铁路运输过程中,受电弓上的传送器将机车的直流电能转换为低压直流电,为列车提供电力。
如果受电弓发生故障,会影响列车正常运行,甚至造成列车脱轨等事故。
铁路机车受电弓在运输过程中,由于受到自身重力、轮轨之间的摩擦力以及外界空气阻力等影响,会发生位置偏移和倾斜。
因此,可以通过检测受电弓的位置偏移和倾斜情况来判断其是否处于正常状态。
检测时,可以通过安装在受电弓上的传感器测量受电弓位置偏移情况,并根据数据计算出偏差值。
当偏差值大于设定范围时,则说明受电弓处于异常状态。
二、接触悬挂接触悬挂是接触网中最重要的部分,其结构与运行状态直接影响着接触网的整体运行状态,进而影响行车安全。
地铁刚性接触网检测技术摘要:随着经济和交通行业的快速发展,人们生活水平的提高,地铁作为主要交通工具,地铁的运输业务日益兴起,其施工技术在一定程度上限制了地铁施工的施工效率和质量。
传统的施工技术已无法满足当前地铁施工的要求。
随着社会需求的不断增加,如何掌握地铁关键设备施工要点,以进一步提高地铁接刚性触网的整体施工质量,已成为我们要重视的问题,我们应科学地制定施工计划,对地铁施工技术进行研究和改进,为确保地铁安全运行提供保障。
关键词:地铁;刚性接触网;检测技术;1.刚性接触网特点在轨道交通轨道上,采用铝合金母线作为支撑支撑,在母线内固定接触网。
硬式悬置系统的主要组成部分有母线,接触线,绝缘子,分段绝缘体等。
“П”形刚性悬空母线是当前常用的一种刚性悬空母线。
为了增加集流截面、增加集流能力、改善耐磨性,一般选用具有预磨性的Cu-Ag接触丝。
与电气化铁道的柔性接触网相比较,高架地铁的刚性接触网有以下特征。
首先,刚性悬架具有较高的刚度和较低的弹性。
弓网接触式刚体悬空所产生的悬空升力非常小,且弓网之间的相互作用主要是刚体效应,悬空系统对碰撞能量的吸收较少。
所以,刚体悬架需要有很高的安装精度。
在使用刚性接触式悬吊时,要尽可能地控制接触面的高差,特别是在锚杆接头及导线支路上的两个悬吊之间的高差。
刚性架空接触网锚节节是由两条平行排列的母线构成,它们沿着线路的纵长方向彼此错开,使用不相交的分叉,并且使悬吊机构能够在与轨道平面垂直的方向上进行升降调整;尽量保证接触面的高度是相同的。
其次,因为弓网间是硬接触,所以弓网处的滑片容易发生不均衡磨损,严重时还会产生部分的沟槽;大大降低了受电弓片的使用寿命。
在非均匀磨损下,弓片在穿越锚杆接头、分段绝缘体等接触式装置时,弓片与装置会产生侧向撞击,使弓片与装置之间的弓片之间的关系更加恶劣。
在受电弓片磨损非均匀性问题中,硬线拉拔限位排布是一个很大的因素。
相对于挠性接触网,刚体接触网具有更短的锚固区和更短的跨度,通常在250米以内。
高速铁路接触网零部件的智能监测与故障检测方法随着高速铁路的快速发展,接触网作为供电系统的重要组成部分,其稳定性和可靠性对于运行安全至关重要。
然而,接触网零部件可能会受到外部环境、运行负荷和使用寿命等因素的影响,导致磨损、腐蚀、接触不良等故障。
因此,如何有效地监测和检测接触网零部件的状态以及准确地诊断故障问题,成为保证高速铁路运行安全和稳定的关键问题。
为了提供智能化的接触网零部件监测和故障检测方法,目前有许多技术手段和方法被应用和研究。
以下是一些常用的智能监测和故障检测方法:1. 无损检测技术:采用超声波、磁粉探伤、红外热成像等无损检测技术,可以对接触网零部件进行全面的、非破坏性的检测,发现零部件表面和内部的缺陷、裂纹等问题。
2. 电气参数监测:通过监测接触网零部件的电气参数,如电压、电流和电阻等,可以判断零部件的工作状态和性能,进而诊断故障和预测零部件寿命。
3. 数据采集与分析:使用传感器网络和物联网技术,对接触网零部件的运行数据进行采集和存储,并借助数据分析算法,提取有用的特征信息,通过与预设的模型进行比对,实现故障的检测和诊断。
4. 图像处理技术:利用摄像头和图像处理算法,可以实时监测接触网零部件的运行状态,如接触线的弯曲程度、接触点的接触面积和接触压力等,从而判断是否存在异常和故障情况。
5. 智能预警系统:利用机器学习和人工智能技术,对接触网零部件进行数据建模和预测分析,通过预警系统实时地提醒运营人员,及时采取措施维护和修复问题,避免故障发生或扩大。
6. 远程监控和维护:利用现代通信技术和云计算平台,实现接触网零部件的远程监控和维护,运营人员可以通过手机或电脑等终端设备,实时获取接触网状态、故障信息和维护建议,减少人工干预和提高响应速度。
通过以上智能监测和故障检测方法的应用,可以提高高速铁路接触网零部件的运行可靠性和维护效率。
但是需要注意的是,智能监测和故障检测方法的实施和应用需要考虑到以下几个方面的问题:1. 数据安全和隐私保护:采集和存储大量的接触网运行数据需要考虑数据的安全性和隐私保护,防止数据泄露和未经授权的访问。
地铁刚性接触网检测技术摘要:通过分析地铁架空刚性接触网结构特点和地铁车辆受电弓及车辆运行模式,指出刚性接触网平面布置形式对弓网关系影响严重,接触线磨耗分布不均匀现象普遍存在,并对其形成原因及影响进行分析。
基于现有地铁线路接触网检测装置的局限性,研究开发了地铁运营车辆接触网检测系统,通过在地铁运营车辆加装专业检测装置,获取弓网运行特征参数,为不同线路的刚性接触网弓网系统的优化设计及运维策略的制定提供依据。
关键词:地铁;架空刚性接触网;弓网关系;磨耗分布;动态检测1 引言随着城市轨道交通线网的快速发展和运量的不断增加,交通部对地铁弓网的安全可靠运行及受流性能、受流质量提出了更高要求。
为确保车辆运行时弓网关系处于良好状态,迫切需要研究开发适用于地铁架空刚性接触网的检测技术,一方面为刚性接触网的施工验收提供自动化检测手段,确保施工安装精度;另一方面为刚性接触网的运营维护提供有力的技术手段,及时检测发现和消除弓网异常状态。
2 接触网性能要求不同类型、不同等级速度接触网在性能要求上有着不同侧重点。
导电率、强度是高铁最重要的参考指标。
刚性接触网和汇流排保持密切连接,其强度实际上并非最重要的要求。
此外接触网系统载流运用汇流排,故主要克服的问题时提高接触线耐电烧蚀能力、耐磨性。
铜铬锆合金属于新型产品,用热处理调制方式,获得不同组合的导电性能与强度。
铜铬锆合金性能出众,相较于铜银合金这种接触线,其优点非常突出。
3 刚性接触网特点(1)刚性悬挂的刚度较大、弹性较小,受电弓接触刚性悬挂引起的悬挂抬升量很小,弓网间的作用更多地体现为刚性作用,冲击能量难以被悬挂装置大幅吸收。
因此,刚性悬挂的安装精度要求较高,应尽量控制刚性接触悬挂的接触线高度误差,尤其应注意控制锚段关节和线岔处两悬挂的高差。
刚性架空接触网锚段关节由平行布置的两汇流排组成,沿线路纵向相互错开,采用无交叉线岔,并保证悬挂装置在垂直于钢轨平面方向可上下调节,使接触线高度尽可能一致。
城市轨道接触网状态检测技术摘要:我国在轨道交通方面进入了全新的发展阶段,人们生活方式也被改变,城市轨道的建设,有效促进了当地经济的可持续发展。
在轨道交通建设中,接触网是重要的组成部分,一旦出现故障,就会导致整条线路的供电系统出现问题,影响地铁运营安全。
因此,对接触网的状态进行检测,是维护地铁正常、安全运行的前提保障。
关键词:地铁接触网;检测前言地铁接触网的作用是为地铁提供电力动能,其质量优劣对地铁的运行有着重要影响。
接触网各部件长期处在负荷状态,再加上外部环境的影响而出现故障,导致列车停止运行,因此,为了接触网保持正常良好的工作状态,对接触网状态进行检测,制定相关防范措施具有重要意义。
一、接触网的测量方式由于接触网的跨距弹性不均匀和受电弓的惯性力的影响,导致地铁受电弓和接触线出现离线现象。
对接触网的检测主要包括对接触网相关参数的检测,如接触线的导高、拉出值等等,还有列车高速行驶时受电弓垂直方向上的振动和冲击值,为了检测这些数据,必须及时掌握接触网检测的各种方法,以下是对各种接触网测量方式的分析。
(一)静态测量方式对接触网静态测量是在使用前期对地铁接触网的悬挂接触各个部分的静态尺寸进行测量,主要测量额数据有接触线的高度、抬升值和之字值等等,静态检测的作用是为了检验接触网的安装是否按照规范的设计准侧设计的,但是静态测量的缺点是只能够反映接触网静态下的位置,不能用于行驶时地铁接触网的检测,只能在低速时作为参考数据。
(二)接触式的检测方式接触式的接触网检测方式是利用广电传感器对接触线产生的磁场进行测量,具体方法是在接触网的受电弓上根据一定的规范的距离按照光电传感器的开关,由于在受电弓和接触线接触的时候,接触线周围会产生磁场,这是光电传感器就会产生感应信号,在结合光电传感器的位置就能计算出拉出值。
接触式检测方式较为简单,但由于操作误差较大,所以测量数据不准确,结果也缺乏精准性。
(三)非接触式的激光雷达扫描测量法非接触式的激光雷达扫描测量法,顾名思义,是利用激光雷达来进行检测,在地铁顶部安装激光雷达,激光雷达会反射出不间断的激光,当遇到障碍物时就会被反射回来,被雷达接收装置接受并记录。