基于FPGA的PID光束稳定控制系统研制
- 格式:pdf
- 大小:772.99 KB
- 文档页数:4

基于FPGA的UPFC控制系统设计的开题报告一、选题背景和意义随着电力系统的规模越来越大和电力负荷的不断增加,电能质量问题越来越受到电力行业的重视。
其中,电压和电流波形的失真、电压闪变和频率偏差等问题,对于电力系统运行的稳定性和可靠性产生直接影响。
针对上述问题,目前已经提出了许多电力系统补偿技术,其中最具代表性的就是柔性交流输电技术(FACTS)。
柔性交流输电技术是指通过电力电子器件对交流电的电压、电流、功率、相位等进行控制,从而实现电力系统谐波滤波、电压调节、无功补偿和功率控制等多种功能。
在FACTS技术中,统一功率流控制器(UPFC)是一种功能强大的电力电子装置,它能够同时对电力系统的负荷电流和电压进行控制,并能够实现电力系统的无功补偿和有功流量控制。
本课题的研究目的就是通过开发基于FPGA的UPFC控制系统,实现对电力系统的无功补偿和有功流量控制,并提高电力系统的稳定性和可靠性。
FPGA作为一种高速可编程逻辑设备,在数字信号处理和控制系统设计方面具有很强的优势,因此本研究选择采用FPGA来实现UPFC控制系统的设计。
二、研究内容和技术路线本研究的主要研究内容包括:(1)UPFC电路的建模与分析,包括UPFC中的电压源逆变器、直流侧逆变器和串联变压器的建模和参数计算。
(2)UPFC的控制算法设计,包括电压控制和有功控制算法的设计和优化。
(3)FPGA的硬件设计和编程,包括数字信号处理器和控制器的设计和优化,并且实现UPFC电路的控制和调节。
(4)系统的仿真和实验验证,验证设计的UPFC控制系统的可行性和有效性。
为了实现上述研究内容,我们将采用以下技术路线:(1)电路建模和控制算法设计:采用MATLAB/Simulink软件进行建模和仿真分析,在此基础上设计UPFC控制算法。
(2)FPGA硬件设计和编程:采用Verilog HDL语言进行FPGA硬件设计和编程,包括数字信号处理器和控制器的设计和优化,并且实现UPFC电路的控制和调节。

基于FPGA的PID控制器研究与实现共3篇基于FPGA的PID控制器研究与实现1近年来,随着现代控制理论的快速发展,PID控制器已经成为了广泛应用的经典算法之一。
PID控制器通过比较目标值和实际值之间的误差,反馈调整控制器的输出信号,实现对被控对象的精确控制。
PID控制器不仅简单且易于实现,而且良好的性能使其在自动控制领域中得到广泛应用。
而FPGA技术的高速并列运算、低延迟和高精度特性,为PID控制器的实时性和精度提供了重要的支持。
本文旨在通过基于FPGA技术的PID控制器研究与实现,探索这一领域的新思路和新方法。
一、PID控制器的基本原理PID控制器基于被控对象的输出值和标准值之间的误差进行控制。
该算法包括比例(P)、积分(I)和微分(D)三个参数。
其中,比例参数是通过直接调整被控量的大小,使其不断靠近标准值;积分参数修正了长期误差,通过积分误差实现偏差的修正;微分参数反映了被控物理系统的动力学特性,通过比率误差的变化率,实现对被控量的快速响应。
二、基于FPGA的PID控制器实现方案基于FPGA的PID控制器比传统的PC或单片机进行控制有更快的响应速度和更低的延迟。
基于FPGA的PID控制器将提供实时数据采集和高速算法处理的结合。
其实现方案基本步骤如下:1. 选择合适的FPGA芯片并进行开发环境搭建,比如选用Xilinx的Vivado软件进行开发。
2. 实现PID控制器的最重要的步骤是设计算法。
基于FPGA的PID控制器主要分为两个部分:控制循环和存储器组件。
控制循环模块主要将控制信号输出给被控对象,从而实现对被控对象的控制;存储器组件则使用存储器来保存被控量及反馈量等数据。
3. 在FPGA芯片上进行系统的相关硬件配置并进行PID算法的编程。
4. 根据实际需要,实现PID控制器与外部设备通信及数据传输,比如串口通讯、以太网通讯等。
三、实验结果与分析为了验证基于FPGA的PID控制器的实现效果和精度,我们进行了一系列实验。

基于FPGA的多功能PID控制器的设计一、前言PID控制是一种常用的控制方式,在工业控制中有着广泛的应用,特别是在温度、压力、流量等参数的控制中非常常见。
PID控制器通过利用被控对象的反馈信息和设定值之间的差距来实现目标控制。
基于FPGA的多功能PID控制器利用硬件实现PID算法,可以大大提高PID控制的速度和精度。
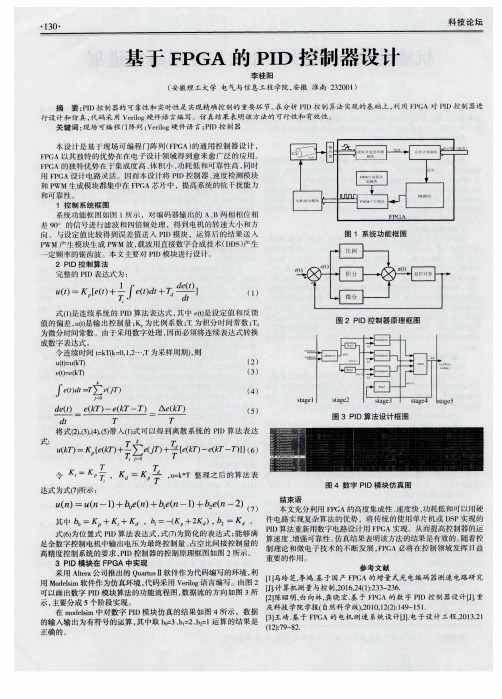
二、多功能PID控制器的基本结构多功能PID控制器的基本结构包括输入信号采集、PID算法运算、输出信号处理。
其中,输入信号采集模块主要负责采集被控对象的反馈信号,PID算法运算模块主要负责对采集到的信号进行PID控制算法的计算,输出信号处理模块负责从PID算法运算模块中获取处理后的输出信号,将输出信号转化为控制信号,最终对被控对象进行控制。
三、PID算法的实现PID算法包括比例控制、积分控制和微分控制三部分,其控制原理是以误差为控制对象,通过增加比例、积分和微分三个分量来实现控制目标。
PID算法运算模块是多功能PID控制器的核心,其主要包括以下几个模块:1. 数据存储模块:用于存储采集到的被控对象的反馈信号以及PID控制器的参数;2. 系数计算模块:用于计算PID控制器的增益系数;3. 控制状态计算模块:用于计算控制状态;4. 控制状态记录模块:用于记录控制状态,用于下一步计算。
三、多功能PID控制器的设计多功能PID控制器的设计需要考虑到以下几个要素:控制速度、控制精度、可扩展性和稳定性。
1. 控制速度多功能PID控制器的速度受到硬件资源的限制,需要选择速度较快的FPGA芯片,同时还需要合理设计硬件结构,使PID算法可以高效运行,并能够快速响应输入信号。
2. 控制精度多功能PID控制器的控制精度受到硬件资源和PID算法的限制,需要在设计中选择适合的硬件资源和PID算法,同时需要在实现过程中尽可能减少误差。
3. 可扩展性多功能PID控制器应具备良好的可扩展性,能够方便地进行功能升级和扩展。
基于FPGA的模糊PID控制器设计许忠仁;姜丽;杨冶杰;朱文伟【摘要】针对实现传统模糊PID控制器时,需要建立比例、积分和微分三个模糊控制器,存在模糊规则较繁杂、运算量大、速度慢等问题,提出了以PD模糊控制器代替PI模糊控制器,采用两个PD模糊控制器,并引入FPGA技术,实现模糊PID控制器.通过Quartus Ⅱ和Matlab联合仿真,比较了基于FBC和SBC实现的模糊PID 控制器的控制效果,验证了设计方案的正确性和可行性.%In the implementation process of traditional fuzzy PID controller, three fuzzy controllers, including scale, integral and differential controllers, are built. To solve the problems of multifarious fuzzy rules, large calculation quantity, slow speed during the design process of the traditional controller, PD fuzzy controller is used instead of PI fuzzy controller. To realize fuzzy PID controller, two PD fuzzy controllers are applied and FPGA technology is introduced to the design scheme. Through the joint simulation of Quartus II and Matlab and the comparison of fuzzy-PID controller based on FBC and SBC, the correctness and feasibility of the design scheme is verified.【期刊名称】《现代电子技术》【年(卷),期】2012(035)021【总页数】4页(P112-115)【关键词】模糊PID;控制器;FPGA;Quartus Ⅱ;Matlab【作者】许忠仁;姜丽;杨冶杰;朱文伟【作者单位】辽宁石油化工大学信息与控制工程学院,辽宁抚顺 113001;辽宁石油化工大学信息与控制工程学院,辽宁抚顺 113001;辽宁石油化工大学信息与控制工程学院,辽宁抚顺 113001;辽宁石油化工大学信息与控制工程学院,辽宁抚顺113001【正文语种】中文【中图分类】TN47-34;TP2020 引言采用常规方法实现模糊PID控制器[1],通常需要设计比例、积分和微分三个模糊推理系统,由于每一项都需要相应的模糊控制器和模糊规则,存在运算量大,求解时间长,响应过程慢等问题,而且大量的模糊规则在实现时也需要消耗较多的逻辑资源。
基于fpga的pid控制器设计基于FPGA的PID控制器设计在现代工业自动化领域中,PID(比例-积分-微分)控制器被广泛应用于各种控制系统中。
PID控制器可以通过对系统的误差进行连续的测量和调整,实现对系统的稳定控制。
而基于FPGA的PID控制器设计,则可以将PID控制算法实现在可编程逻辑器件上,提供更高的计算性能和灵活性。
在实际的FPGA PID控制器设计中,首先需要对被控对象进行建模和参数的测定。
建模是指将实际的被控对象转化为数学模型,以便进行控制算法的设计和仿真。
参数测定是指通过实验或模型辨识的方法,确定PID控制器中的比例、积分和微分参数,以使得系统的控制性能最优。
接下来,需要将PID控制算法实现在FPGA芯片上。
FPGA芯片具有高度可编程性和并行性,能够提供更快的响应和更高的计算性能。
通过使用硬件描述语言(HDL)如VHDL或Verilog,可以将PID控制算法转化为FPGA上的逻辑电路,并通过时钟信号进行同步。
在FPGA上实现PID控制器的关键是如何将连续的控制算法转化为离散的电路。
其中,采样周期的选择是一个重要的考虑因素。
采样周期应根据被控对象的动态特性和控制要求进行选择,以保证系统的稳定性和控制性能。
一般来说,较短的采样周期可以提高控制的灵敏度,但也会增加系统的计算负载。
除了采样周期外,PID控制器的输出还需要进行数字到模拟的转换,以控制外部执行机构。
这可以通过使用数字-模拟转换器(DAC)来实现。
DAC可以将FPGA输出的数字信号转化为模拟电压或电流,以驱动执行机构。
为了验证PID控制器的设计和性能,可以通过在FPGA上进行仿真和实际实验来进行验证。
仿真可以通过在FPGA开发板上加载控制程序,并对模拟或实际的被控对象进行测试。
实验则是将FPGA控制器与实际的被控对象连接,以验证其在实际环境中的控制性能。
基于FPGA的PID控制器设计是一项复杂而又重要的工作。
它不仅需要对被控对象进行建模和参数测定,还需要将PID控制算法转化为FPGA上的逻辑电路,并进行数字到模拟转换。