chapter04_地面三维激光雷达误差分析及检校
- 格式:pdf
- 大小:900.35 KB
- 文档页数:15
地面三维激光扫描仪的检校与精度评估摘要:本文针对地面三维激光仪的各项指标提出系统的检校方法,并据此得到地面三维激光扫描仪器精度评估结果,为后期的工程应用提供精度依据和质量控制。
为此,首先针对激光扫描仪的特点,建立各种误差源的误差模型,围绕常规工程关心的精度指标,完成对仪器整体的检校和精度评定。
关键词:地面三维激光扫描仪;检校;精度评估引言在地面三维激光的应用中,扫描仪的测量精度起着重要的角色,尤其在一些工程建设和变形监测中,为了使点云数据达到最大精度,必须进行扫描仪的检校。
若因使用时的外力碰撞和其他未知因素造成仪器内部构造发生变化,则扫描结果可能含有系统性误差。
1、概述三维激光扫描测量系统,也称为三维激光成图系统,主要由三维激光扫描仪和系统软件组成,其工作目标就是快速、方便、准确地获取近距离静态物体的空间三维模型,以便对模型进行分析和处理。
激光扫描仪所获得的数据是由离散的三维点构成的点云。
点云的每一个像素包含有一个距离值和一个角度值。
三维激光扫描技术获取的点云数据,可以达到毫米级的采样间隔,从而激光扫描技术可以应用于工程测量、古建筑和文物保护、数字城市等领域,并已有许多成功例子。
然而,三维激光扫描仪在使用过程中,对于仪器的精度和指标都有严格的研究。
事实上,三维激光扫描仪的分辨率、回波、时间和大气影响等都是影响点云精度的误差来源。
通常情况,仪器与被测点的距离越近,激光光斑越小,分辨率越高,回波信号越强,相应的测量精度就越高,反之,则测量精度越低。
此外,回波还受目标材质的反射率和边缘效应影响。
而温度的变化也可令某种激光扫描仪测距结果在x,y方向产生偏移。
现有关于地面三维激光扫描技术的研究较多集中在逆向工程中的应用及数据处理,然而地面三维激光扫描技术的精度以及对工程应用的影响是实际工程中需要面对的重要问题,激光扫描测量仪器的精度也影响三维点云模型的建立和应用,因此地面三维激光扫描仪的检校与精度评估对于三维激光扫描仪的有效应用是十分必要的。
三维激光扫描仪及其测量误差影响因素分析发表时间:2020-12-07T07:28:40.205Z 来源:《中国科技人才》2020年第23期作者:周志雄[导读] 三维激光扫描主要是利用内部的脉冲发射器对着被监测目标发射脉冲激光,通过反光镜旋转,将已经发射出的激光直接扫过被监测目标的信号接收器,从而接受来自被监测目标反射回来的激光,利用激光脉冲从发射通过对备件扫描,建立坐标系,逆向建模,可以生成三维模型或者三维空间坐标,从而生成二维图。
包钢钢联股份工程服务公司内蒙古包头市 014080摘要:三维激光扫描主要是利用内部的脉冲发射器对着被监测目标发射脉冲激光,通过反光镜旋转,将已经发射出的激光直接扫过被监测目标的信号接收器,从而接受来自被监测目标反射回来的激光,利用激光脉冲从发射通过对备件扫描,建立坐标系,逆向建模,可以生成三维模型或者三维空间坐标,从而生成二维图。
关键词:三维激光扫描仪;测量误差;应用前言由于现在在测绘过程中,异型件、曲面件逐渐增加,简单机加件逐渐减少,传统的测绘方式很难满足现在的需求,三维扫描仪的出现,推动了工业发展,预测着提供了一种新的技术手段。
1三维激光扫描仪工作原理通过观察投影到表面上的激光线来完成表面采集。
激光扫过表面后,设备根据通过三角测量法确定的位置记录数据。
激光线在部件上的可见度是数据采集成功与否的关键因素。
激光线的可见度受颜色和材料类型影响。
反射率高的部件易产生慢反射,导致难以读取部件上的激光线。
黑色会吸收光线,也会因缺乏对比度而导致激光线难以读取。
通过调整快门参数可抵消黑色、反射和透明物体的影响。
完善的部件准备工作也会带来更好的扫描结果。
2三维激光扫描仪校准确保校准板附近没有标点;如果条件允许,将校准板置于手提箱内保存;确保校准板附近没有反射物;在执行校准时请放松,手势速度要慢;如果探测到错误、损坏或错放的标点,校准过程可能会失败。
扫描仪必须指向校准板中心,即圆圈所示的位置,并应将红线(扫描仪的高度和方向)对齐到绿色矩形内。
第33卷第11期传感技术学报Vol.33No.11 2020年11月CHINESE JOURNAL OF SENSORS AND ACTUATORS Nov.2020 Error Analysis and Calibration of Terrestrial3D Laser Scanner"XIA Guisuo1,NIU Zhisheng2,LIU Fang1,FU Yanjun1(1. Ministry of Education Key Laboratory of Nondestructive Testing, Nanchang Hangkong University,Nanchang Jiangxi330063 ,China;2.Hebei Special Equipment Supervision and Inspection Institute Handan Branch,Handan Hebei056000,China)Abstract:A calibration method based on distance error identification was proposed for ground3D laser scanner.The structure and optical system of the instrument were introduced,and various system errors of the instrument were analyzed,and the error correction algorithm was designed.In the calibration process,multiple targets were arranged in a large range,and the space coordinates of the targets were measured at different positions from the targets by the terrestrial3D laser scanner.Then the distance between any two targets were calculated,and the instrument correction parameters were identified according to the calibration algorithm.The calibration method neither to obtain the spatial coordinates of the target,nor to perform the conversion between the scanner coordinate system and the world coordinate system can greatly reduce the number of calibration parameters.The calibration test and the accuracy verification test showed that the measurement accuracy of the points near10m,20m,and30m from the instrument were respectively±2.7mm,±2.9mm,±4.1mm,and met the accuracy index requirements of±(2+L/10000)mm.The calibration method was easy to operate,had low requirements for calibration conditions,and had strong practicability. Key words:terrestrial3D laser scanner;calibration;distance;targets;parameter identificationEEACC:7230doi:10・3969/j・i s sn.1004-1699・2020・11・014地面三维激光扫描仪误差分析及标定*夏桂锁",牛志盛2,刘芳打伏燕军1(1.南昌航空大学无损检测教育部重点实验室,江西南昌330063;2.河北省特种设备监督检验研究院邯郸分院,河北邯郸056000)摘要:提出一种基于距离误差辨识的地面三维激光扫描仪标定方法。
三维激光扫描仪及其测量误差影响因素分析摘要:随着社会的发展与进步,重视三维激光扫描仪及其测量误差影响对于现实生活具有重要的意义。
本文主要介绍三维激光扫描仪及其测量误差影响因素的有关内容。
关键词:三维激光扫描仪;误差测定;影响因素;中图分类号: r814 文献标识码: a 文章编号:引言三维激光扫描技术是一种先进的全自动高精度立体扫描技术。
又称为“实景复制技术”,主要面向高精度逆向工程的三维建模与重构。
它可以高效地采集大量的三维点。
少则几万个,多则几百万个。
它可以深入到复杂的现场环境中进行扫描,将各种大型的、复杂的、不规则的实景三维数据完整地采集到电脑中,从而快速重构出目标的三维点云模型。
此外,它所采集的三维激光点云数据还可进行各种后处理工作,如测绘、计量、分析、仿真、模拟、展示、监测、虚拟现实等。
这对于有限元分析、工程力学分析、流体动力分析等是非常重要的。
这种逆向工程的数据获取方式目前在我国还是个薄弱的领域。
一、三维激光扫描仪的概念三维激光扫描技术是测绘领域继gps技术之后的一次技术革命。
三维激光扫描仪通过高速激光发射器运用激光测距原理,瞬时测得空间三维坐标值的测量仪器。
它突破了传统的单点测量方法,具有高效率、高精度的独特优势。
三维激光扫描技术能够提供扫描物体表面的三维点云数据,因此可以用于获取高精度高分辨率的数字地形模型。
二、地面型三维激光扫描系统工作原理三维激光扫描仪运用了激光的方向性、单色性、高亮性、相干性等特点,实现了测量速度快,操作简单,测量精确度高等目的。
对地面三维激光扫描仪来说,采用的是仪器坐标系统,即所采集到的物体表面点的空间信息是以其自身的坐标系统为准的。
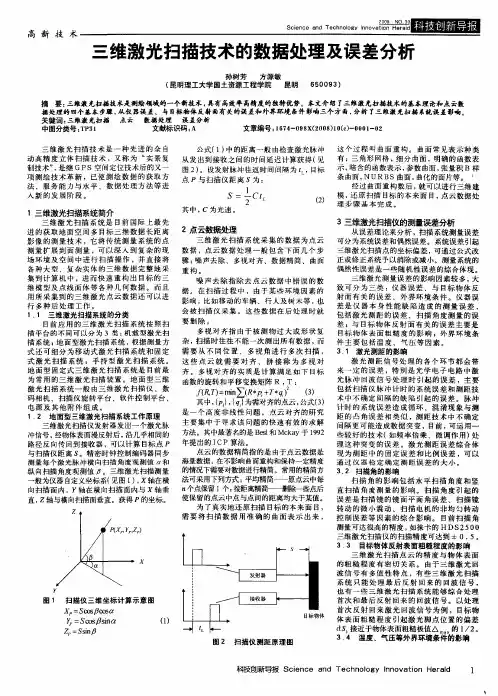
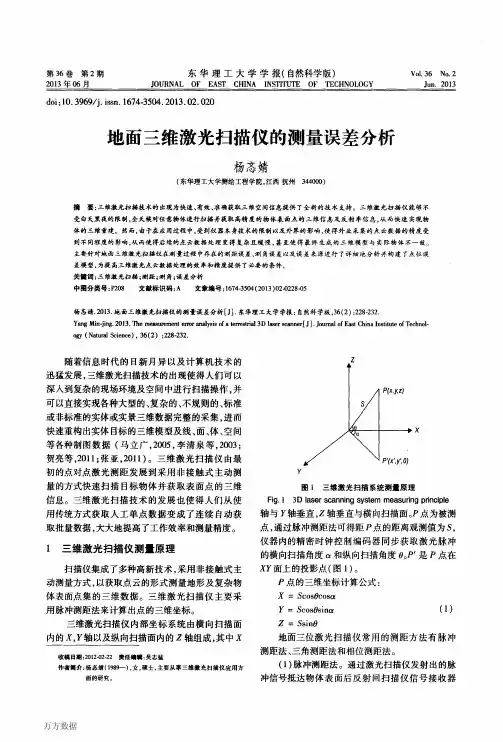
系统以激光束发射处为坐标原点;z轴位于仪器的竖向扫描面内,向上为正;x 轴位于仪器的横向扫描面内;y轴位于仪器的横向扫描面内且与x 轴垂直,如图1-1,由此可得点坐标的计算公式:图1采用脉冲测距法的三维激光点坐标图2 目标物体倾斜引起测距偏差二、点云数据的误差来源及分析从误差理论来分析,径向扫描系统测量误差可分为系统误差和偶然误差。
三维激光扫描技术及其误差影响因素分析[摘要]本文在阐述了三维激光扫描技术的测量原理及其扫描特点的基础上,进一步分析了其测量误差的影响因素,以供参考。
[关键字]三维激光扫描技术误差影响因素三维激光扫描技术是上世纪九十年代中期开始出现的一项高新技术,是继GPS 空间定位系统之后又一项测绘技术的新突破。
它以高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据。
能够快速、大量的采集空间点位信息,为快速建立物体的三维影像模型提供了一种全新的技术手段。
具有快速性,不接触性,穿透性,动态、实时、主动性,高精度、高密度,自动化、数字化等特性。
三维激光扫描技术又被称为实景复制技术,是测绘领域继GPS技术之后的一次技术革命。
它突破了传统的单点测量方法,具有高效率、高精度的独特优势•三维激光扫描技术能够提供扫描物体表面的三维点云数据,因此可以用于获取高精度高分辨率的数字地形模型。
1三维激光扫描仪的测量原理三维激光扫描仪是在激光的相干性、方向性、单色性和高亮度等特性基础上,同时注重操作简便和测量速度,从而保证测量的综合精度,测量原理主要为有测距、扫描、测角、定向四方面。
应用扫瞄技术来测量工件尺寸及形状等原理来工作。
主要应用于逆向工程,负责曲面抄数,工件三维测量,针对现有三维实物在无技术文档情况下,可快速测得物体轮廓集合数据,加以建构,编辑,修改生成通用输出格式的曲面数字化模型。
2快速扫描技术特点快速扫描是扫描仪诞生的概念,常规测量中,对每一点测量花费时间在2-5秒,而有时对一点的坐标进行测量更达到几分钟的时间,当下对于此测量速度已经十分落后了,而改变了这一现状的正是由于三维激光扫描仪的诞生,脉冲扫描仪(seanstation2最快速度可达到每秒50000点,而相位式扫描仪Surphaser最高速度已超120万点每秒,这种扫描技术是对物体详细描述的基本保证,深入测量的领域包括古文体,工厂管道,隧道,地形等。
激光雷达测量误差分析和修正方法探讨激光雷达作为一种高精度、高分辨率的测量工具,被广泛应用于地图绘制、自动驾驶、机器人导航等领域。
然而,在实际应用中,激光雷达的测量结果往往会受到各种误差的影响,这些误差会对测量结果的准确性和可靠性产生重大影响。
本文将探讨激光雷达测量误差的来源,以及一些常见的修正方法。
激光雷达测量误差主要可以分为硬件误差和环境误差两类。
硬件误差包括系统误差和器件误差。
系统误差主要源自激光装置、光电探测器和信号处理等方面,如发射器的非线性、接收器的失真、时间同步误差等;器件误差主要是由于激光雷达的机械部件和电子部件的不完美制造或老化引起的,如激光发射器与接收器的对准误差、光电元件的非均匀性等。
环境误差则包括大气折射误差、噪声干扰、多路径效应等因素。
因此,在进行激光雷达测量时,我们需要对这些误差进行分析和修正,以提高测量结果的精确度。
针对激光雷达的硬件误差,我们可以通过标定和校准来进行修正。
标定是指通过实验或者比对相对准确的参考数据,将激光雷达的测量结果与实际数值进行对比,从而建立误差模型。
校准则是根据误差模型对测量结果进行修正。
常见的标定方法包括距离标定、角度标定和强度标定等。
距离标定是通过已知距离的目标物进行标定,来校准激光雷达的测量距离值。
角度标定则是通过已知角度的目标物进行标定,来校准激光雷达的测量角度值。
强度标定则是通过已知反射率的目标物进行标定,来校准激光雷达的测量强度值。
标定后,可以建立误差模型,并通过相应的算法对每个测量值进行修正,从而提高测量结果的精确度。
对于激光雷达的环境误差,我们可以通过滤波算法进行处理。
滤波算法主要用于去除测量结果中的噪声和异常值,从而提高测量结果的可靠性。
常见的滤波算法包括均值滤波、中值滤波、卡尔曼滤波等。
均值滤波是通过取多次测量值的平均值来降低误差和噪声的影响,适用于噪声比较平稳的情况;中值滤波则是通过去除最大值和最小值,取剩余值的平均值来达到去除异常值的效果;卡尔曼滤波则是一种递归最小二乘估计滤波算法,通过预测和更新步骤,对测量结果进行动态修正,适用于需要实时跟踪目标位置和速度的场景。
激光雷达测量原理与误差分析摘要:如今的测量工具,像全站仪和GPS接受机在测绘中的效率都较传统的仪器而言提高了许多,通过国内外的研究和应用显示激光雷达测量技术为测绘领域提供了先进的手段和方法。
激光雷达测量技术在各个领域的应用已经有几年的时间,它最大的优点就是突破了传统单点测量的数据采集处理方法,同时又不像GPS技术需要卫星的支持,为测绘领域提供了一条新的研究方向。
同时,我们还要看到作为新技术,激光雷达测量还不成熟,还需进行很多深入研究才能更好的把这一技术应用到各个领域。
而且,国家一直都没有颁布激光雷达测量技术的国家标准,这使得当我们将激光雷达测量技术应用到工程领域的时候也会产生困惑。
虽然有这些不足,但不难看出激光雷达测量技术的应用前景十分广阔。
*水利部“948”项目(201219)关键词:激光雷达;测量原理;误差引言激光雷达测量技术以模块化的空间信息数据采集手段取代了传统的单点空间信息采集方式。
其优点非常明显,如快速、精确、无接触式测量等。
但是相比传统方式,它也有一些缺陷,如扫描后的点云除噪,多站点云拼接,三维建模等,大量的数据处理工作需要在后期来完成。
新的数据采集和处理方式也带来了新的误差源。
本文简述激光雷达测量基本原理后,相应的介绍其误差源并分析其影响及一些初步控制措施。
一、激光雷达测量技术的工作原理现在,主流的激光雷达测量主要有两种测距方式,脉冲式测距和相位式测距。
脉冲式测距是通过测量激光在仪器到目标物体来回传送的时间来确定激光雷达测量仪到物体间的距离,原理非常简单,目前,市面上比较完整的地面激光雷达测量系统主要包括,激光扫描系统、激光测距系统、集成的CCD摄像机和仪器内部控制与校正系统。
相位式测距的工作原理类似于GPS的载波相位测距,通过测定调制在激光束上的调整光的波长的相位延迟,利用波长和相位差来间接计算出仪器与反射物体之间的距离。
激光雷达测量仪不仅仅是测量仪器到物体之间的距离,还要通过仪器内部的轴系系统得到仪器与目标物体的相对位置关系,从而利用已知的仪器坐标得到未知的物体空间位置信息。
第10卷第4期2012年8月水利与建筑工程学报Journal of Water Resources and Architectural EngineeringVol.10No.4Aug.,2012收稿日期:2012-04-18 修稿日期:2012-05-10基金项目:国家级创新训练项目/三维激光扫描仪在文物测绘中的应用研究0作者简介:刘 浩(1992)),男(汉族),江苏淮安人,在校本科生,研究方向为数据处理及应用。
地面三维激光扫描仪数据的误差分析刘 浩,张冬阳,冯 健(河海大学地球科学与工程学院测绘工程系,江苏南京210098)摘 要:针对三维激光扫描技术应用中的误差问题,简要分析了三维激光扫描仪的误差来源,从理论上详细分析了单点点位误差、坐标分量误差与距离、竖直角、水平角之间的定量关系,归纳总结了误差的分布规律;鉴于三维激光扫描最终数据处理对象的最小单元为位于同一个面上的点云数据,采用了Tr i mble -GX 三维激光扫描仪进行了扫描试验,通过对不同距离、不同扫描角度的扫描结果进行平面拟合,分析了拟合面精度与扫描距离、角度、扫描物表面粗糙程度的关系。
关键词:三维激光扫描技术;误差来源;误差分析;设站指导中图分类号:P207文献标识码:A文章编号:1672)1144(2012)04)0038)04Error Analysis for Data of Terrestrial 3D Laser ScannerLI U Hao,ZHANG Dong -yang,FENG Jian(School o f Earth Science and En gineering ;Hohai University ,N an jin g ,Jiangsu 210098,China)Abstract:A brief analysis of 3D laser scanner .s error source is made based on its funda mental principle.The detailedanalyses of the quantitative relations between single point error,c oordinate component error and distance,vertical angle,and horizontal angle are made theoretically,and the error distribution rule is also summarized.Since the minimum term-i nating process unit in 3D laser scanning system is the poin-t cloud data on the sa me plane,the Trimble -GX 3D laser scan -ner is used to make the scanning experiment.By fitting the plane with diverse distances and scanning angles,the rela -tions between the fitting accuracy with the distance and angle as well as the toughness of the scanned plane are analyzed at last.Keywords:3D laser scanning technology;sources of error;error analysis;direction of setting up station 三维激光扫描技术是一种先进的全自动高精度立体扫描技术,可以深入到复杂现场环境中采集大量的点云数据,从而可以满足精确建模的要求,并能利用采集的点云数据快速重建出原实体的三维模型,方便用户从中提取三维点、线、面、体等各种数据,广泛应用于逆向工程、测绘、虚拟仿真等不同的领域[1-2]。
科技与创新┃Science and Technology&Innovation ·18·2021年第07期文章编号:2095-6835(2021)07-0018-03激光雷达测量误差的分析与修正——以电科38所出品的激光雷达为例*储政勇,王俊(合肥公共安全技术研究院,安徽合肥230031;安徽省公共安全应急信息技术重点实验室,安徽合肥230031;中国电子科技集团第三十八研究所,安徽合肥230031)摘要:激光雷达可以快速地获取大量高精度点云数据,在自动驾驶等诸多领域有着广泛的应用前景。
但在实际使用中,由于温度、湿度、能见度等环境因素的变化不可避免地导致测量结果的异常波动,需要对测量数据进行误差修正。
详细阐述了激光雷达的原理,并以电科38所出品的中距离激光雷达测量数据为例,以最小二乘拟合的方式,对其三维测量数据进行误差分析与修正,将测量精度由厘米级提升至毫米级。
该方法对于扩展激光雷达的应用领域提供了新的思路。
关键词:激光雷达;误差分析;误差修正;最小二乘拟合中图分类号:TN958.98文献标志码:A DOI:10.15913/ki.kjycx.2021.07.0051引言近年来,随着汽车自动驾驶技术的兴起,激光雷达作为自动驾驶系统的核心部件取得了长足发展,先后经历了机械式激光雷达、混合固态激光雷达与固态激光雷达等发展阶段[1],测量范围可达数百米,测量精度可以达到厘米级别,且随着工艺的改进,其成本也能控制在较低的范围。
激光雷达具有速度快、分辨率高、非接触等优点,除了在自动驾驶领域,在地形测绘、复杂古建筑保护以及大尺寸三维建模等领域均有广泛的应用前景[1-3]。
激光雷达的测距原理为激光时间飞行法[4],由激光器发出短脉冲激光信号,经被测物反射后沿原路返回,被探测器接收。
其测距精度由时间测量单元的精度决定,通常只能达到厘米级别,且易受环境因素的影响,无法提供毫米级3D 深度信息,限制了其应用领域的进一步发展。