基于三维激光雷达技术的大比例尺地形图解决方案
- 格式:docx
- 大小:5.56 MB
- 文档页数:15
智慧地球NO.12 202339智能城市 INTELLIGENT CITY 机载LiDAR在山区1∶500地形图测绘中的应用汪家意 王君 田泽海(广州市城市规划勘测设计研究院,广东 广州 510060)摘要:山区1∶500地形图测绘难度较大,植被遮挡严重,倾斜摄影技术无法获取植被覆盖层下的真实高程数据。
文章选定一块区域作为试验区,结合机载激光雷达与倾斜摄影技术,利用机载激光雷达(LiDAR)获取地面点云数据生成山区等高线并采集高程点数据,再利用倾斜摄影的三维模型成果基于eps平台内业采集其他地形要素并最终成图。
结果表明,山区地面点云成果高程中误差为12 cm,山区地形图的高程中误差为14 cm,满足要求。
关键词:机载激光雷达;倾斜摄影;1∶500地形图测绘中图分类号:P217文献标识码:A文章编号:2096-1936(2023)12-0039-03DOI:10.19301/ki.zncs.2023.12.0111∶500地形图测绘是国土空间规划的重要基础数据,精度要求高,测图时需要获取地面精准的高程信息。
以往采用全野外数字化地形图测绘,先进行图根控制测量,再利用全站仪在图根控制点上摆站,施测所有可见的要素,内业计算出碎步点并打印白纸图到外业实地连线并进行属性调查,最后根据成图要求基于成图平台进行内业成图,外业工作量大、作业效率低、可达性不足。
倾斜摄影数字化地形图测绘是近几年兴起的一种作业方法,在地面进行像控点测量,利用无人机搭载五镜头相机获取影像数据,再基于内业处理软件进行空三加密与优化、模型构建、纹理映射、模型修饰与优化等操作,相较于全野外数字化地形图测绘的方法,外业工作量大幅度减少,作业效率显著提升[1-2],但成果精度易受天气、光线等因素影响,同时无法应用于采密集建筑、植被茂密等有遮挡的区域,因此难以应用于山区大比例尺地形图测绘。
倾斜摄影测量与全野外数字化地形图测绘都有各自的优缺点,当前主流的全野外数字化地形图测绘方法是将两种方法结合,在视野开阔的无遮挡区域,如施工地、路面、水系等区域使用倾斜摄影测量的方法作业,在植被遮挡严重和建筑密集区域使用全野外的方法作业。

激光雷达在地形测图中的应用随着测绘技术的发展,有些传统测绘的方法无法满足一些测绘项目的要求,传统全站仪人工测量山地效率低下,通视条件极差,一个测站只能近距离测几个点,用RTK测量山地,相比全站仪跑点方便了些,但GPS信号难保证,且野外地形险恶,人身安全得不到保证,激光能的效地穿透森林冠层,大幅提高林下地形的精确提取精度。
随着激光雷达技术的推出,能完好得解决此类问题。
2022年6月我们在国外有个1:1000的地形测绘的项目(项目要求能精确测出探矿区的地貌,结合物探算出矿产储量),地形南北低中间高,起伏较大,最大高程约920m,最小高程约400m,高差达520m。
另外,测区内大部分区域为原始森林,树木高大、茂盛,森林覆盖率达 98%,树下灌木丛生、荆棘满布,峡谷、河流、冲沟密集,这些给测量工作的通行、通视带来较大困难。
此次测量工作较为困难和复杂。
经过考查研究,激光雷达技术是首选技术,选择了国内较为成熟的设备华测AS-900HL低空机载激光雷达。
激光雷达技术简介与工作原理:激光雷达是激光探测与测距系统的简称,它通过测定传感器发出的激光在传感器与目标物体之间的传播距离,分析目标地物表面的反射量大小,反射波谱的幅度,频率和相位等信息,进行目标定位信息的精确解算,从而呈现目标精确的三维结构信息。
R=1/2C*T (其中R为传感的目标的距离,C为光在空气传播中的速度,T为激光的往返时间)。
无人机激光雷达系统由:激光测距系统、POS系统(由全球定位系统,惯性测量单元组成)及控制系统。
POS系统是激光雷达机载平台获取移动状态下的位置和姿态数据的主要途径,GPS获取实时的位置坐标,并结合IMU获取的平台的姿态变化,以解算获取机载激光雷达系统的运动轨迹及姿态信息,以此支持三维激光点云解算。
1 技术标准和坐标系统1.1 技术标准1.1.1 《工程测量规范》GB 50026-2007;1.1.2 《地质矿产勘查测量规范》GB/T 18341-2001;1.1.3 《全球定位系统(GPS)测量规范》GB/T 18314-2009;1.1.4 《国家三、四等水准测量规范》GB/T 12898-2009;1.1.5 《低空数字航空摄影测量外业规范》CH/Z 3004-2010;1.1.6 《低空数字航空摄影测量内业规范》CH/Z 3003-2010;1.1.7 《国家基本比例尺地图图式第1部分:1:500 1:1000 1:2000地形图图式》GB/T 20257.1-2017;1.1.8 《测绘成果质量检查与验收》GB/T 24356-2009;1.1.9 《测绘作业人员安全规范》CH 1016-2008。
三维激光扫描技术在地质测绘中的应用摘要:采用三维激光扫描技术进行地质测绘是传统地质测绘方式的重大变革。
传统的扫描技术,在对地质进行测绘的过程当中,一般采用逐点测量的方式,既浪费了大量的人力物力,又需要耗费很多的时间。
而三维激光扫描技术凭借先天的优势,克服了传统技术的许多缺点,能够在短时间内高效完成全面扫描,且得到精准的数据,凭借其优势在地质测绘当中得到了广泛的应用。
因此本文主要从地质测绘的作业流程、三维激光扫描技术的工作原理、以及三维激光扫描技术在地质测绘中的应用入手,希望能够为三维激光扫描技术在地质测绘中的应用提供更多参考。
关键词:三维激光扫描技术;地质测绘;应用引言:近几年,三维激光扫描技术在我国各领域得到了广泛的应用,尤其是在三维建模城市测绘方面,起到了极大的推进作用,节约了大量的劳动力、人力、物力,大大提高了地质测绘的精确程度,在地质测绘当中发挥了巨大的作用,使得我国地质测绘工作效率大大提升。
基于这种背景下,对三维激光扫描技术的应用探究是非常必要的,它是时代发展的必然趋势,具有很高的现实研究意义,因此本文展开以下探究。
1.地质测绘的作业流程1.数据采集数据采集工作主要是运用三维激光扫描技术对整体的勘测区真实情况进行大体的了解,并对具体的信息进行整合。
细节数据采集主要需要关注以下几个方面:一是保证数据的完整性,要对勘测地区进行整体的把握,以保证测绘的整体质量水平要求;二是要尽量减少测绘信息量,这样能够尽量避免处理原始数据的过程,减少不必要的工作量,在信息量的选择过程当中,要把握经济性的原则,通过选择合适的信息来进行地质的测绘,避免因为不必要的误差而影响测绘进度,同时这也是为什么选取的勘测区站点都相对较少的原因;三是拍照时要便于数据的处理编辑修改,通常来说选取数据采样标准时要按照严格的比例尺规格,以便能够修改架构,获得相关的信息数据匹配,使与之相关的数据达到良好的数据应用效果。
1.数据预处理数据预处理的过程,就是通过同名控制标靶,对多测站数据统一坐标系的过程。
机载激光雷达在1:500地形图测绘中的应用摘要:机载激光雷达是现代工程测绘的重要手段,其能通过无人机平台搭载激光扫描仪、数码相机等传感设备,准确获取地物信息资料,为工程项目建设提供数据支撑。
本文在阐述机载激光雷达测绘原理的基础上,就其在1:500地形图测绘中的应用要点展开分析,期望能进一步提升机载激光雷达应用效益,保证地形图测绘效率和精准性,促进测绘工程的持续、稳步发展。
关键词:测绘工程;机载激光雷达;地形图;测绘工程测绘工作能为工程项目建设提供全面的地形地貌信息资料,有助于项目设计、施工工作的开展。
现代工程建设模式下,人们对于地形图测绘的效率和精度提出较高的要求,促使工程测绘技术手段获得全面创新。
在1:500地形图测绘中,机载激光雷达应用广泛,其能在克服植被等地表物遮挡的基础上,较为有效准确的获知真实的地形地貌信息,为工程项目建设奠定良好基础。
一、机载激光雷达技术原理作为一种现代化的工程测绘技术,激光雷达技术在激光测距、惯性导航测量的基础上,融合使用了差分定位、计算机等多种技术,实现了工程测量的数字化发展。
结合激光雷达搭载载体的差异,将激光雷达分为星载、机载和地基激光雷达三种形态。
机载激光雷达主要是依托无人机搭载激光雷达设备进行地物目标信息获取和测量的。
在实际测量中,无人机搭载平台上包含了的激光扫描仪、数码相机等雷达探测设备和激光测距设备;在地物信息获取阶段,无人机上的激光测距系统会依据技术设计向探测目标发射高频激光脉冲,这样能直接获取地物表面的特征点信息;随后通过GPS接收机接收这些信息,借助计算机完成数据处理,可生成高密度的三维空间坐标点云。
对激光点云数据进行分析,可知道每个点均有(X,Y,Z)三维坐标,这些坐标的精度较高,从不同的视角实现点云的三维显示。
通过测量和计算这些点云数据,能实现测量目标表面积、体积等信息的准确量测。
对比传统工程测量手段,即在激光雷达技术因多次回波可有效的削弱目标物附近的障碍物的干扰,整体测量效率较快,测量精度较高[1]。
使用激光雷达进行地质测绘的技巧与方法地质测绘是研究地球表面形态与结构的一项重要技术。
近年来,激光雷达技术得到了广泛应用,其高精度、高效率的特点使其成为地质测绘领域的热门工具。
本文将介绍使用激光雷达进行地质测绘的技巧与方法,通过对影响测绘结果的关键因素进行分析,以提高测绘精度和效果。
1. 激光雷达原理与系统构成激光雷达是一种通过测量激光信号的反射时间和强度来获取地物三维空间位置信息的仪器。
激光雷达系统主要由激光发射器、接收器、时钟同步单元和数据处理单元等部分组成。
其中,激光发射器负责产生激光脉冲,接收器接收反射回来的激光信号,时钟同步单元确保激光发射和接收的时序一致,数据处理单元对接收到的信号进行处理和分析。
2. 激光雷达在地质测绘中的应用激光雷达技术在地质测绘中具有广泛的应用价值。
首先,激光雷达可以实现高精度的三维地形测量,可以获取地表形态和地形变化信息,为地质灾害防治和自然资源调查提供依据。
其次,激光雷达可以实现地下地质构造的研究,通过反射激光信号在地下的传播情况,可以探测地下岩石、土壤和水层等地质构造。
此外,激光雷达还可以用于地质遥感,通过对激光信号的散射、吸收等特性进行研究,可以获取地质矿产等重要信息。
3. 激光雷达地质测绘技巧在使用激光雷达进行地质测绘时,需要注意以下几个技巧。
3.1 光束和点云密度控制激光雷达通过发射光束,通过反射信号的强度和时间来计算地物的距离和形状。
为了实现精细的测量,需要控制光束和点云的密度。
光束密度过高会增加数据量,增加后续数据处理的难度,而光束密度过低则会影响测量精度。
因此,需要根据实际情况进行合理的设置,保证目标物体的所有特征得到准确测量。
3.2 扫描角度选择激光雷达一般具有水平和垂直两个扫描角度,合理选择扫描角度可以提高测绘效果。
水平扫描角度的选择应考虑地形开阔程度、遮挡物等因素,垂直扫描角度的选择应根据目标地质特征确定。
不同类型地质特征需要采用不同的扫描角度,以获取更全面准确的信息。
三维激光扫描仪技术在地形测量中的应用摘要:随着信息技术的发展,三维激光扫描仪以其非接触、快速、大范围获取点云数据等特点在地形测量中得到了广泛的应用。
本文以三维激光扫描仪为例,介绍三维激光扫描仪在地形测量中的应用方法,实践表明,三维激光扫描仪具有扫描速度快、精度高、成本低等优点,能为测绘工作者提供实时、准确的地形信息,为高精度的数据分析提供保证。
在今后的测绘工作中,三维激光扫描仪将会被广泛应用于地形测量中,成为数字化测绘时代测量工作者得力的助手。
关键词:三维激光;扫描仪技术;地形测量;应用1 引言随着现代科技的不断进步,新的测量技术和方法不断涌现,三维激光扫描仪就是其中的一种。
三维激光扫描仪是一种非接触式、快速、大范围获取点云数据的测量仪器,其能够在远距离直接采集物体表面的三维点云数据,并且能够直接获取高精度、高分辨率的空间三维坐标。
其具有高精度、快速、非接触、大范围、非接触等优点,尤其是三维激光扫描仪的非接触性,使得其在地形测量中的应用越来越广泛。
三维激光扫描仪不仅能提供点云数据,还可以提供大量数据信息,如点云模型、点云纹理、点云球体模型等,为地形数据分析提供了丰富的信息。
2 三维激光扫描技术的工作原理2.1 测距原理三维激光扫描技术通过对激光的发射,再对其进行接收,将数据进行处理和计算,从而获得被测物体的三维坐标,实现测量目的。
通过激光测距原理可以得知,测量物体距离的过程主要有两种:一种是接收点到测量物体之间的距离,另一种是目标物体与测量物体之间的距离。
如果要对这两种距离进行准确测量,首先要对激光发射点与激光接收点之间的距离进行精确计算。
三维激光扫描仪系统在进行测距时,将被测物放置于测距机的中心位置上,通过激光发射器发射出两束激光束,再通过其反射到测距机的接收设备中,同时可以看到两个光脉冲信号分别在被测物表面反射。
其中,被测物表面的反射率是指在激光光束照射到被测物表面时,被测物表面会产生多大的反射率,而反射率又是指被测物表面能够反射激光光束的角度,因此可以通过两个激光光斑面积之比来计算被测物体与激光光斑的距离。
工程技术科技创新导报 Science and Technology Innovation Herald97三维激光扫描技术是20世纪90年代中期激光应用研究中的一项重大突破,被誉为“继G P S 技术以来测绘领域的又一次技术革命”,又被誉为“三维实景复制技术”[1]。
传统的地形图测量采用全站仪数字化测图、G P S -R T K 测图、数字摄影测量等方法。
但是这些方法外业工作量大,且在地形险峻、作业人员难以到达的地方往往显得无能为力[2]。
三维激光扫描仪具有精度高、速度快、全数字特征、主动性强等特性[3]。
基于这些技术优势三维激光扫描仪在非常规地形图测绘中的应用案例越来越多,尤其是在工程地质条件较差、人员无法到达、比较危险的地方,采用三维激光扫描仪对于局部地区的精细地形图测绘,具有其独特的技术优势。
三维激光扫描技术运用于地形图测量改变了传统地形图测绘的作业流程,使外业测绘流程更加简单、工作时间更少、劳动强度明显下降、内业数据处理自动化程度显著提高,弥补了传统地形测量技术的不足[4]。
目前三维激光扫描仪在进行地形图测量时并没有规范的作业流程和统一的生产标准,主要是使用三维激光扫描仪仪器厂商提供的软件进行相应的数据处理工作。
不同品牌的仪器所开发的软件也有所不同,但是在功能上都大同小异。
三维激光扫描技术为数字化测图提供了一种新的技术手段和方法。
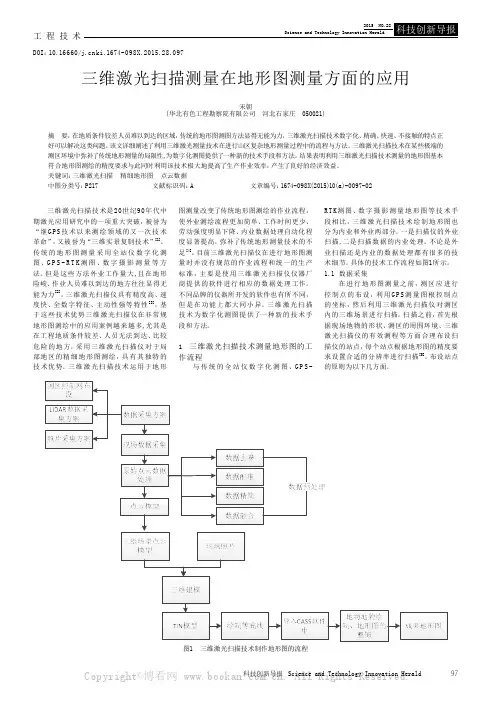
1 三维激光扫描技术测量地形图的工作流程与传统的全站仪数字化测图、G P S -R T K 测图、数字摄影测量地形图等技术手段相比,三维激光扫描技术绘制地形图也分为内业和外业两部分。
一是扫描仪的外业扫描,二是扫描数据的内业处理。
不论是外业扫描还是内业的数据处理都有很多的技术细节。
具体的技术工作流程如图1所示。
1.1 数据采集在进行地形图测量之前,测区应进行控制点的布设,利用G P S 测量图根控制点的坐标,然后利用三维激光扫描仪对测区内的三维场景进行扫描。
扫描之前,首先根据现场地物的形状、测区的周围环境、三维激光扫描仪的有效测程等方面合理布设扫描仪的站点,每个站点根据地形图的精度要求设置合适的分辨率进行扫描[5]。
机载LiDAR在1:1000地形图测图中的应用发布时间:2021-05-28T11:28:00.157Z 来源:《基层建设》2021年第3期作者:苏晨阳[导读] 摘要:随着无人机技术的飞速发展,测绘行业近几年发生了翻天覆地的变化,现如今,无人机结合机载LiDAR技术成为了高效采集数据的一种方法。
广东省核工业地质局测绘院广东省广州市 510400摘要:随着无人机技术的飞速发展,测绘行业近几年发生了翻天覆地的变化,现如今,无人机结合机载LiDAR技术成为了高效采集数据的一种方法。
机载LiDAR系统集合了激光雷达,GPS导航系统和惯性导航系统三种系统,可以快速、大面积获取测区内的高密度点云数据,为DEM,DSM,DLG等成果生产提供了快速、可靠的数据依据。
本文以惠东某县的开发区地形测量为例,利用机载LiDAR结合航空摄影测量,对该开发区进行线划图的生产,并进行成果检测,结果表明,LiDAR技术可以满足1:1000比例尺地形图生产的需求。
关键词:LiDAR;无人机;线划图;测绘;Application of airborne LiDAR in 1:1000 topographic mappingSU Chenyang(Surveying and Mapping Institute of Guangdong Province Nuclear Industry Geological Bureau,GuangZhou Guangdong 510400)ABSTRACT:With the rapid development of UA V technology,great changes have taken place in the surveying and mapping industry in recent years.Nowadays,the combination of UA V and airborne LiDAR technology has become an efficient method to collect data.The airborne LiDAR system combines three systems:lidar,GPS navigation system and inertial navigation system.It can quickly and widely acquire high-density point cloud data in the measuring area.It provides fast and reliable data basis for production of DEM,DSM and DLG.Taking the topographic survey of a development area in Huidong as an example,this paper uses airborne LiDAR combined with aerial photogrammetry to produce the DLG of the development area and to test the results.The results show that the LiDAR technology can meet the requirements of 1:1000 scale topographic map production.Keywords:LiDAR;UA V;DLG;Surveying and mapping1引言激光雷达技术简称为LiDAR,是一种集激光雷达,GPS和惯性导航系统三种系统于一体的测量系统,为快速、精确的获取空间信息提供了简单有效手段。
无人机载激光雷达在地形测绘中的应用摘要:无人机搭载激光雷达模块、高精度惯导、测绘相机、云台等模块,能够形成一体化的地形测绘方案,轻松实现全天候、高效率实时三维数据获取以及复杂场景下的高精度后处理重建。
以下对无人机载三维激光雷达在地形测绘中的应用进行了探讨。
关键词:无人机;激光雷达;地形测绘引言无人机搭载相机进行地形测绘已经在各行各业进行了广泛的应用,随着激光雷达的高度集成化,设备在重量大大减轻,为无人机搭载激光雷达创造了条件,激光雷达具有相机无法比拟的优势,其精度高、穿透性强、能够全天候作业,逐渐成为研究的新宠。
1无人机激光雷达系统概述无人机激光雷达系统使用小型无人机作为飞行平台。
它主要由无人驾驶飞机、GNSS导航系统、惯导系统、飞行控制系统、激光雷达、测绘相机和地面控制系统组成。
无人机载激光雷达技术是一种主动式测绘地表空间信息的技术手段,通过主动发射激光脉冲,获取探测目标反射回来的信号并处理得到地表目标的空间信息。
因此,无人机载激光雷达技术不受天气、光照等条件的制约,能在恶劣复杂的环境中获取了高精度的地面空间信息。
其能够实时生成真彩点云,通常单架次飞行可快速获取2平方公里的点云数据。
和传统的人工测量的技术手段相比,极大地减少了工作量,缩短了外业测量的时间,提高了测量工作的效率。
同时可以对很多较为危险的区域进行测量,减小了外业作业人员的安全风险。
2无人机载激光雷达在地形测绘中的应用2.1测区概况某矿区地形测绘中,矿区本身属于山间盆地地形,最大海拔高度1051.86m,海拔最低点为800m,整个矿区地势复杂,植被茂盛且以林木和灌木为主,道路交通条件较为便利,从保证测绘工作质量和提高测绘效率的角度,使用无人机载激光雷达进行测绘工作。
2.2像控点的布设和测量像控点设置原则: 像控点的精度和数量直接影响到航测数据后处理的精度,所以像控点的布设和选择应当尽量规范、严格、精确。
像控点选在影像清晰的明显地物点、地物拐角点、接近正交的线状地物交点或固定的点状地物上,局部高程变化小且点位周围相对比较平坦地区。
城市大比例尺地形图测绘技术研究随着城市化进程的加快,城市的规划和建设成为了各个国家的重要任务。
为了更好地进行城市规划和管理,大比例尺地形图测绘技术成为了越来越受重视的领域。
大比例尺地形图是指比例尺较大、地形细部显示较为清晰的地图,它可以为城市规划、土地利用、环境保护以及基础设施建设提供重要的参考依据。
本文将从测绘技术的发展历程、测绘技术的现状以及未来发展方向等方面进行详细的探讨。
一、测绘技术的发展历程人类早在古代就开始使用简单的测绘技术来制作地图。
最早的地图之一是中国的《浑天仪象》,它是一部以地图形式记录下来的天文观测成果。
随着科学技术的不断进步,地图测绘技术也在不断发展。
18世纪末,法国科学家卡赞格拉绘制了第一张精确的地形图,标志着现代地图测绘技术的诞生。
20世纪初,航空摄影和卫星遥感技术的发展对地图测绘技术产生了深远的影响。
航空摄影不仅大大提高了地图测绘的效率,还使得地图精度得到了显著提高。
而卫星遥感技术则使得我们可以在更大范围内获取地形数据,为城市规划和建设提供了更为丰富的信息。
二、测绘技术的现状目前,城市大比例尺地形图测绘技术已经涵盖了多种技术手段,主要包括卫星遥感、激光雷达测绘、全息激光扫描、数字相机测绘等。
卫星遥感技术可以获取地表的遥感影像,解决了传统测绘方法中地理信息获取难的问题,提高了测绘数据的获取效率和精度。
激光雷达测绘则通过激光束扫描地面,测量地表的高程信息,对城市地形进行高精度、高时效的测绘。
全息激光扫描则利用激光全息技术实现对地形的高精度三维重建。
数字相机测绘则通过数字相机获取地表影像,结合地理信息系统对地图数据进行处理。
这些技术手段在城市大比例尺地形图测绘中发挥着重要作用,为城市规划和建设提供了重要的技术支持。
随着科学技术的不断进步,城市大比例尺地形图测绘技术也将不断迎来新的发展。
无人机技术的发展将为城市大比例尺地形图测绘带来新的机遇。
无人机可以在较低高度对地理信息进行采集,可以避免地面遮挡、采集时间受限等问题,提高了地图数据的获取效率。
测绘技术中的三维地形模型重建方法随着科技的发展,测绘技术逐渐从传统的二维测绘向三维测绘方向发展。
在三维测绘中,地形模型的重建是一项重要的任务。
本文将介绍测绘技术中的三维地形模型重建方法。
一、激光雷达扫描法激光雷达扫描法是一种常用的三维地形模型重建方法。
它通过激光点云数据的获取和处理,实现地形模型的重建。
激光雷达扫描法的工作原理是利用激光器发射出的激光束对地面进行扫描,并通过接收激光束的反射波来获取地面的几何形状。
激光雷达可以高效地获取大面积的地形数据,数据精度高,并且可以快速重建三维地形模型。
二、摄影测量法摄影测量法是另一种常见的三维地形模型重建方法。
它通过航空摄影或者地面摄影的方式获取地面的影像数据,然后通过影像处理和解译,实现地形模型的重建。
摄影测量法的优势在于可以获取高分辨率的地貌数据,并且可以通过多视角的影像数据来实现地形模型的重建。
然而,摄影测量法在测量精度方面相对较低,对于垂直结构的物体不够灵敏。
三、卫星遥感法卫星遥感法是一种利用卫星获取地表影像数据并进行三维地形模型重建的方法。
卫星遥感数据可以覆盖大范围的地理区域,能够获取全球范围的地形数据。
卫星遥感法的优势在于可以长时间连续观测同一地点,并且可以获取大范围的地貌数据。
然而,卫星遥感法在分辨率和测量精度方面有一定的限制。
四、无人机航测法随着无人机技术的不断发展,无人机航测法成为一种新兴的三维地形模型重建方法。
无人机可以搭载各种传感器,如激光雷达、相机等,进行地形数据的采集。
无人机航测法具有灵活性高、成本低等优势,可以实现小范围、高分辨率的地形数据采集。
然而,无人机航测法需要解决飞行路径规划、图像匹配和数据处理等技术难题。
五、数据融合法为了提高三维地形模型的精度和可靠性,数据融合法被广泛应用于测绘技术中。
数据融合法通过将多种数据源的数据进行融合,实现了地质地貌信息的全面表达。
数据融合法可以利用不同传感器和数据源的优势,消除各种数据误差,提高地形模型的精度。
激光雷达技术在三维地图构建中的应用优势随着科技的不断进步和智能化技术的广泛应用,激光雷达技术作为一种高精度、高效率的三维感知方式,在三维地图构建中扮演着重要角色。
激光雷达技术通过发射激光束并接收其反射信号,可以获得高精度的空间点云数据,从而构建出真实世界的三维地图。
本文将重点探讨激光雷达技术在三维地图构建中的应用优势。
首先,激光雷达技术具有高精度的优势。
激光雷达可以实现高频率的激光束发射和接收,能够在较短的时间内获得较多的观测点,从而提供更高分辨率的地图数据。
激光雷达不受光照、天气等因素的影响,能够在各种环境下获取准确的三维点云数据,确保地图构建的精度。
这使得激光雷达可以广泛应用于机器人导航、自动驾驶、智能交通等领域,为智能化系统提供精准的感知和定位功能。
其次,激光雷达技术还具有较高的遥感能力。
激光雷达通过发送激光束并测量其返回时间,可以获取目标物体的距离信息。
通过连续测量和地面扫描,可以构建出目标物体的三维形状和空间位置。
这种遥感能力使得激光雷达可以对远距离的目标进行感知和定位,例如建筑物、地形等。
同时,激光雷达能够通过多波束同时扫描,提高数据获取的效率,从而缩短地图构建的时间。
此外,激光雷达技术在三维地图构建中具有较高的适应性。
激光雷达可以通过调整参数,实现不同距离和角度的测量,适应不同场景的地图构建需求。
无论是室内环境还是室外环境,激光雷达都能够准确获取三维点云数据,不受光照、雨雪等因素的限制。
这种适应性使得激光雷达可以应用于各类地形、复杂环境,为地图构建提供更广阔的应用场景。
另外,激光雷达技术还具有较高的实时性和可靠性。
激光雷达能够在较短的时间内完成大量激光束的发射和接收,能够实时获取地图数据并进行处理。
同时,激光雷达的观测数据相对较稳定,不易受到外界干扰,可以获取可靠的地图信息。
这使得激光雷达可以在实时导航、虚拟现实等应用中发挥重要作用,提供稳定而可靠的感知与定位。
综上所述,激光雷达技术在三维地图构建中具有精度高、遥感能力强、适应性高、实时性和可靠性等优势。
三维激光扫描仪在地形测量中的运用摘要:随着科技不断发展,测绘技术不断更新,传统的地形测绘技术已经无法满足地形测量的需求。
在地形测量过程中,要综合性的、灵活地将新技术新设备与传统测绘技术中的设备相互结合,组织并协调人员的分工与环境的利用,保证地形测量的精度,共同努力,提高工作效率和经济效益,促进地质行业的更好发展。
三维激光扫描技术革新了测绘技术,在很大程度上促进了测绘数据获取方法、处理方法以及服务能力和水平的发展。
三维激光扫描具有较好的实时性、主动性和适应性,本文会介绍该技术在地形测量中如何发挥它的作用。
一、引言地形测量的方法来由传统的平板白纸测图、经纬仪测图等发展到现在的全站仪配合绘草图、全站仪配合测图精灵或笔记本电脑进行野外数字化成图的方法,使地形测量由原始手工绘图测量向一体化发展,在技术和精度上都有很大的提高。
三维激光扫描技术是一项迅速发展的高新技术,它的出现为空间三维信息的获取提供了全新的技术手段。
三维激光扫描技术主要采用激光测距原理,瞬时测得空间三维坐标值。
其巨大优势就在于可以快速扫描被测物体,不需反射棱镜即可直接获得高精度的扫描点云数据,这样一来可以高效地对真实世界进行三维建模和虚拟重现。
目前此项技术已广泛应用于变形监测、工程测量、地形测量、城市规划、智能交通、防震减灾等领域。
二、三维激光扫描系统.三维激光扫描仪按照扫描平台的不同可以分为:(1)机载型激光扫描系统;(2)地面型激光扫描系统,还可根据测量方式细分为移动式激光扫描系统和固定式激光扫描系统;(3)手持型激光扫描系统。
地面型三维激光扫描系统一般由三维激光扫描仪、数码相机、扫描仪旋转平台、软件控制平台、电源及其他附件组成。
1 地面三维激光扫描技术是以三维激光扫描仪的诞生为代表,是继GPS(Global Position System)技术以来测绘领域的又一次技术革命,该技术是一种先进的全自动高精度立体扫描技术,又称为“实景复制技术”,是继GPS空间定位技术后的又一项测绘技术革新。
文章编号:100926825(2007)1920359202利用L IDAR 技术获取大比例尺DEM 应用实践收稿日期:2007201214作者简介:魏富朝(19572),男,高级工程师,秦皇岛市测绘大队,河北秦皇岛 066000王洪峰(19802),男,助理工程师,秦皇岛市国土资源局,河北秦皇岛 066000魏富朝 王洪峰摘 要:以秦皇岛市航测1∶2000数字正射影像图(DOM )、数字高程模型(DEM )、数字线划图(DL G )项目为例,阐述了利用机载激光雷达(L IDAR )技术获取大比例尺数字高程模型(DEM )的方法,分析了应用实践中的一些问题,展望了今后的应用前景。
关键词:数字高程模型(DEM ),机载激光雷达(L IDAR ),数字摄影测量中图分类号:TU198.1文献标识码:A 机载激光雷达(L IDAR )即L Ight Detection And Ranging ,是一种安装在飞机上的机载激光探测和测距系统。
L IDAR 系统通过扫描装置,沿航线采集地面点三维数据,通过特定方程解算处理成适当的影像值,生成L IDAR 数据影像和地面高程模型。
数字高程模型的制作和应用是数字城市建设的重要环节,是城市基础空间数据集和城市GIS 的重要组成部分,其在城市建设和发展中的地位和作用越来越重要。
为满足秦皇岛市土地资源调查、城市规划、建设、管理和宏观决策对基础地理信息数据的需求,该市采用机载激光雷达系统(L IDAR )、惯性GPS 导航(IMU )和数码相机技术对沿海地区1424km 2区域进行了数据采集,获得了1∶2000比例尺高分辨率数字正射影像图(DOM )、数字高程模型(DEM ),并生产了210km 2范围的数字线划图(DL G )。
1 数字高程模型的用途及先进性数字高程模型(DEM )即Digital Elevation Model ,是在某一投影平面(如高斯投影平面)上规则格网点的平面坐标(X ,Y )及高程(Z )的数据集。
基于三维激光雷达技术的大比例尺地形图解决方案一激光雷达技术1.1 综述激光雷达测量技术(LiDAR)是当今测绘业界先进的遥感测量手段,是继GPS空间定位系统之后又一项测绘技术新突破。
自20世纪60年代末世界第一部激光雷达诞生以来,激光雷达技术作为一种重要的航空遥感技术,与成像光谱、成像雷达共同被誉为对地观测三大核心技术。
迄今为止,激光雷达的研究与应用均取得了相当大的进展,已成为航空遥感领域主流之一,其应用已超出传统测量、遥感以及近景测量所覆盖的范围,成为一种独特的数据获取方式。
LIDAR技术具有高精度、高分辨率、高自动化且高效率的优势,集激光扫描、全球定位系统和惯性导航系统技术于一身,同时配备高分辨率数码相机,可实现对目标的同步测量,生成高密度激光点云数据,已成为世界各国进行大面积地表数据采集的重要主流与趋势。
与传统摄影测量技术相比,激光雷达技术生成三维信息更快、更准确,特别能穿透地表覆盖的森林植被快速获取地形信息的能力,具有其他技术无可比拟的优势。
采用激光雷达技术获取地面及其覆盖物(植被、电力线等)的精确三维坐标,生成高精度地形信息,可作为土地利用、工程建设规划、城市管理、河海地形、水库大坝、山坡检测、防灾、矿业、农业、林业、公共管理等方面数字化、自动化等应用基础。
1.2 激光雷达技术基本原理激光雷达是一种有效的主动遥感技术,通过发射激光脉冲及精准的量测回波所经过的时间计算传感器与目标物之间的距离,再结合飞行器姿态信息、位置信息进行相关解算和坐标转换可以得到高精度的三维数据。
机载激光雷达系统主要由飞行平台、激光测距系统、全球定位系统(GPS)、惯性导航系统(INS)以及相关的控制存储单元组成。
激光测距系统是激光雷达的核心组成部分,通过发射、接收激光信号可以精确测量发射器和目标物的距离。
激光测距一般采用方式:脉冲测距和连续波的相位差测距。
连续波激光器市场上较为少见,因此现有的激光雷达系统多采用脉冲测距的方式。
通过激光器发射一束窄脉冲,与目标物接触后产生反射,并通过接收器接收回波信号。
由于脉冲的速度已知(光速),接收器可以精确测量脉冲发射到接收到反射信号的时间,从而获得目标物与激光器的距离,其测量精度常常可以达到毫米级。
随着激光雷达技术的发展,激光雷达的飞行平台可以根据需要和实际作业条件进行多种选择,目前常见的搭载平台有小型飞机、固定翼飞机、直升飞机、无人机、动力三角翼、无人飞艇等。
激光雷达系统工作原1.3 激光雷达优势•直接获取目标三维信息:利用POS和激光信息直接获取具有真实地理坐标的目标三维信息•自动化程度高:对目标区域进行全自动数据获取•受天气影响小:主动遥感,通过主动发射激光脉冲进行数据采集•精度高:测距精度最高可以达到毫米级别•穿透能力强:可以穿透植被获取高精度地形信息•快速进行数据获取:每秒最多可发射数千万个点,快速进行大面积数据获取激光雷达技术可以穿透茂密的森林而获取厘米级的地面高程信息直接获取目标三维信息二激光雷达数据采集2.1 技术路线激光雷达数据测量作业的生产环节,主要包括航摄设计、航摄数据采集、数据预处理、激光数据分类、数字高程模型(DEM)制作、数字正射影像(DOM)制作。
其详细作业流程如下图所示。
激光雷达航测作业流程图2.2 航飞设计地面基站在飞行区域内,架设GPS 固定基准站,用地面GPS 固定基准站采集的数据与POS 系统内部的双频GPS 接收机采集的数据进行差分测量,经数据处理获得连续的、更精确的传感器位置。
根据差分GPS 技术要求,GPS 基站与机载GPS 距离不能大于30km 。
根据这一要求,设计在航测区域内均匀布设2个基站即可满足要求。
地面基站技术设计 站点原则 架设在GPS C 级以上控制点。
基站间隔平均30km 。
基站设备 双频GPS 设备,续航能力8小时以上。
采用天宝5700高性能双频GPS 设备,提高地面设备采集精度。
观测要求 GPS 接收机数据采样间隔0.5秒;最小卫星数4颗;卫星截止高度角5度;量取GPS 天线高,填写观测手簿等相关资料。
检校设计检校场设计检校场选择面积约1km ×1km 区域,要求地形平坦,尖顶房多。
检校场航线AB CD EF GHJK L M检校场航线设计参数表检校场控制测量检校场测量1、布设激光检校控制点要求:1)直线控制点:每隔50米一个控制点,长度大约2公里,精度<2cm,越高越好。
2)零散控制点:在中心区域均匀布设10-15个控制点,精度<2cm,越高越好。
3)所有控制点都布设在路面上,且地物材料均匀。
避免高低反射率交接地区,避免周围地物遮挡,避免在陡坎和地物过度边界、便道边缘布设。
2、布设相机检校控制点要求:1)在重叠中心区布设5-10个控制点,在航线四个边缘区域总共布设5-10个控制点,精度<2cm。
2)控制点选取地物特征点上,并做好点之记和控制点照片存档。
航线设计航线设计航线示意图2.3质量保障措施激光雷达生产质量管理贯穿于承接任务、组织准备、技术设计、生产作业、过程检查直至产品交付使用全过程。
实施质量管理,坚持以预防为主的指导思想,所有生产采取PDCA模式进行。
P—策划:为提供结果建立必要的目标和过程;D—实施:实施过程C—检查:根据方针、目标和产品要求,对过程和产品进行监视和测量,并报告结果;A—处置:采取措施,以持续改进过程业绩按质量控制的实施办法,实行三级质量检查制度,即作业者自查、作业部门设立的专职检查人员的过程检查、质量管理部门的最终检查。
每级检查要有明确的检查内容和要求,还应有相应的记录和报告。
各级检查独立进行,不得省略或代替。
各级检查记录中对发现的问题提出处理意见,并对处理后的结果进行复查。
检查中发现的质量问题应及时改正。
2.4飞行质量保障1.飞行控制措施整个航飞过程中,飞机转弯坡度一般要控制在15°以内(标准转弯),避免造成GPS卫星信号的失锁,导致航飞数据作废而重飞。
如果航路时间大于30min,则在进入测线前必须转个n字形弯,才能开始正式测线航飞。
在沿测线飞行过程中,必须满足如下要求:(1)不同航线必须采用左转弯和右转弯交替方式,绝对不能绕圈飞行;(2)偏离航线不得大于25m,航高上下偏离不得大于25m‘(3)航偏角一般不大于6°,最大不大于15°;(4)像片倾斜角一般不大于2°,最大不大于4°;(5)航线转弯曲度不大于3%;(6)飞机速度要求保持在航摄设计时速;2.飞行前地面测试按照严格的仪器操作规范,每次起飞前认真做好地面通电测试及相关准备工作,确保整套航摄系统处于正常状态。
3.航高和航线弯曲度控制航摄作业人员通过激光雷达测量系统实时监测飞行高度,当实际飞行高度数值与设计飞行高度发生偏差时,应及时与机长沟通给予修正,确保航高满足设计要求。
由于每一条航线都设计有5km的预备航线,确保飞机有宠妃的时间准确平稳地进入航线。
航飞过程中航摄作业人员通过监视器观察航迹偏差漂移情况,当飞机沿航迹左右发生偏差即将超出规定值时,应及时提醒机长进行修正,确保航线弯曲度小于3%。
4.航向和旁向重叠度控制由于激光雷达测量系统集成了先进的航摄控制系统实现GPS定点曝光,因此确保飞机在设定规定的航线飞行后,航片的航向和旁向重叠度即得到有效保证。
5.影像色彩质量控制在每天航摄作业时根据具体天气情况使用最佳曝光参数,在航飞过程中要一直监控航片质量,做好航测中飞行速度、高度、摄影质量、激光回波的检查记录工作,并根据天气变化情况适时调整曝光参数,以确保同一项目不同架次、同一架次不同时段所拍摄的航片影像校色准确、色彩均匀、相同地物的色彩基本一致。
2.5摄影质量评价航摄飞行结束后需对航摄成果进行检查,包括阴影、云影、航测漏洞、重叠度和航片角等,填写航摄鉴定表。
如果采集的数据无法满足项目要求,需及时安排重新采集。
航摄作业全部结束后要编写航摄外业总结报告。
激光航测数据采集生产流程质量控制示意图三数据处理3.1三维激光扫描数据处理总体技术路线3.2数据预处理POS数据处理所需数据:机载数据、基站数据、基站说明、偏心分量值解压缩数据将获取到的pos数据进行解压缩,Extract解压完毕后,检查是否有数据丢失(gap)。
GPS数据的差分计算对于 POS数据处理整个流程来说,对 GPS数据进行差分计算最主要的一个目的就是,能够为和 IMU数据融合提供一个精确的 GPS数据,因为 IMU数据的精度相当地依赖于 GPS数据的精度。
数据的加载,加载机载数据和基站数据,设定正确的基站坐标,通过软件计算进行GPS数据的差分计算。
激光数据预处理不同的设备获取到的激光点云数据格式均不相同,我们需要通过三维激光扫描设备自带软件将获取到的原始三维激光点云数据进行预处理,将其处理成通用的点云数据格式,以便进行后续的数据处理及产品生产。
影像数据预处理通过设备自带软件将获取到的原始影像数据进行预处理,将其处理成通用的影像数据格式,以便进行后续的数据处理及产品生产。
3.3 激光点云数据处理与DEM制作点云数据处理流程激光检校测距误差受多种因素的影响。
对于脉冲式激光器来说,测距误差主要取决于激光飞行时间的测量精度。
测角误差包括扫描角零点误差与扫描角比例误差,扫描角零点误差表现为当瞬时扫描角为零时,激光出射方向与激光扫描器坐标系Z轴不重合;而扫描电机的非匀速旋转以及扫描振镜的振动都会给扫描角带来误差,表现为实际扫描角与理论扫描角之间存在一定的比例关系。
其中主要包括扫描振镜与轴承之间的力矩误差以及实际偏转角与预设值之间的差异。
为此需要在专门的检校场进行测距、测角改正。
利用LIDAR定向扫描,在其每个整数角度处布设标志点,然后利用全站仪获取各标志点的精确位置,根据测量的真实坐标和LIDAR系统量测坐标反推参数,最终得到测角、测距相关改正数。
检校的最终目的是要确定所有的系统误差,并对所求的原始激光点数据进行改正,使其只剩下随机误差。
数据分块由于整个测区的点云数据量非常大,计算机的硬件处理能力有限,所以我们需要将数据分成小块以满足计算机的处理能力。
点云分块要参考点云密度和电脑RAM,一般分块规则如下:2GM RAM-大约每块500万个点。
4GM RAM-大约每块1000-1500万个点。
例如:数据加载后可以发现,原始数据的点云密度在4(点/米2)左右,考虑到2GM RAM 机器的处理速度,500w/4=1250/米2,因此,实际项目中,我们将Block大小设置为1000m*1000米,及每1平方公里一个块。
点云分块结果点云分类一束激光打到地面上,可以有若干次的反射信号回来,我们需要得到地表的信息,可采用处理最后一次反射值(last echo)的方法。