机电传动控制-步进电机
- 格式:ppt
- 大小:1.12 MB
- 文档页数:32
第十三章步进电机13.1步进电动机的结构与原理1.概念:概念步进电动机或称脉冲电动机,是一种将输入脉冲信号转换成输出轴的角位移(或直线位移)的执行元件。
步进电动机每输入一个脉冲信号,便转动一个确定的角度(称为:步距角)。
输出轴转过的总角度是与输入脉冲的个数成正比,输出轴转速与出轴转过的总角度是与输入脉冲的个数成正比输出轴转速与脉冲的频率和歩距角成正比。
N n fθβ∝∝2.结构定子:硅钢片叠成定子:凸极式相:每两个相对的磁极上绕有一个线圈,构成一相。
控制线圈三相:六个极,三个绕组,构成三相13113.1 三相反应式步进电动机的结构示意图转子:材料:硅钢片或软磁材料4个凸极、无绕组3.类别:按励磁方式分为:反应式转子无励磁绕组磁阻式反应式:转子无励磁绕组,磁阻式永磁式:转子为永久磁铁混合式(永磁感应式)按输出转矩分类为快速步进电动机07N 4N 按输出转矩分类为:快速步进电动机0.7 Nm~ 4 Nm ;功率步进电动机T=5 Nm~ 4 0Nm ;4.特点:fn N θβ∝∝●线性好,无累计误差,可变频调速;●抗干扰能力强;●转动惯量小能快速起动反转与制动在一相绕●转动惯量小,能快速起动、反转与制动。
在相绕组通电的情况下有自锁能力。
5.工作原理(1)工作原理:电磁铁原理:定子绕组通电,在铁心中产生磁场,总是力图沿磁阻最小的路径通过。
这种磁场力产生力矩,使转转动当达到最短路径的位置则自锁使转子转动,当达到最短路径的位置则自锁。
转子自锁位置定子绕组通电顺序(顺时针)转子自锁位A B C转子顺时针转向100A---1A’---3010B---2B---4B2’4 001C3C1C---3’----1 100A---4A’---2图13.2 单三拍通电方式时转子的位置(a)A相通电图13.2 单三拍通电方式时转子的位置(b)B相通电图13.2 单三拍通电方式时转子的位置(c)C相通电图13.2 单三拍通电方式时转子的位置(a)A相通电图13.3 步进电机的通电方式(a)A相通电图13.3 步进电机的通电方式(b)A、B相通电图13.3 步进电机的通电方式(c)B相通电图13.3 步进电机的通电方式(d)B 、C相通电13.3B6. 步进电动机的主要特性(1)矩角特性——电磁转矩随偏转角度变化的关系近似为正弦曲线(2)启动惯频特性——启动频率与负载转动惯量的关系空载时,由静止突然启动且不失步所允许的最高启动空载时由静止突然启动且不失步所允许的最高启动频率,称为启动频率或突调频率(3)运行频率特性不失步运行的最高脉冲频率(4)矩频特性负载转动惯量一定且稳态运行时的最大输出转矩与脉冲频率的关系。
步进电机控制原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
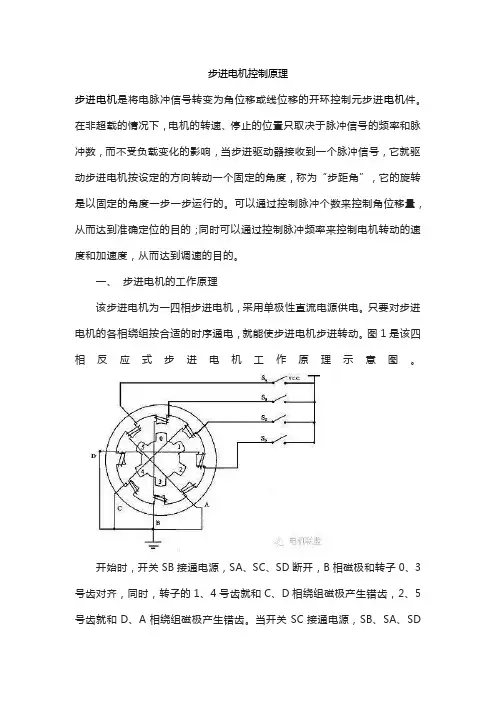
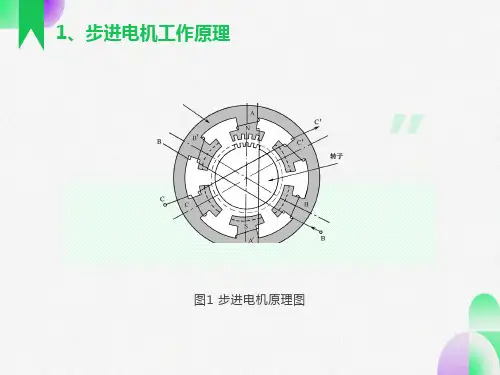
一、步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D 四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍c八拍51单片机驱动步进电机的方法:驱动电压12V,步进角为7.5度. 一圈360 度, 需要48 个脉冲完成!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
步进电机运动规律及速度控制方法姓名:吴良辰班级:10机设(2)学号:201010310206学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。
了解最新控制技术在机械设备中的应用。
在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。
也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。
机电系统一般可分为图一所示的三个部分。
图1 机电传动控制在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。
那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。
记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。
上完这门让我更详细了解他们内部的结构和工作原理。
还说明知识是慢慢积累的过程。
见的多学的多。
我明白了很多以前的疑惑。
看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。
尤其是日本的机器人。
它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。
我觉的两者都有。
很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。
在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。
所以步进电机是个好东西。
我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的反应式步进电机没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。
很遗憾的是它是国外人发明的。
开始写正题了,上完这门课,那个步进电机是让我很痴迷的。
机电传动控制第五版课后答案--最全版机电传动控制是一门涉及机械、电气和控制等多领域知识的重要学科,对于相关专业的学生和从业者来说,掌握这门课程的知识至关重要。
而课后习题的答案则是检验学习成果、加深理解的重要工具。
以下为您提供机电传动控制第五版的课后答案,希望能对您的学习有所帮助。
第一章绪论1、机电传动控制的目的是什么?答:机电传动控制的目的是将电能转变为机械能,实现生产机械的启动、停止、调速、反转以及各种生产工艺过程的要求,以满足生产的需要,提高生产效率和产品质量。
2、机电传动系统由哪些部分组成?答:机电传动系统通常由电动机、传动机构、生产机械、控制系统和电源等部分组成。
电动机作为动力源,将电能转化为机械能;传动机构用于传递动力和改变运动形式;生产机械是工作对象;控制系统用于控制电动机的运行状态;电源则为整个系统提供电能。
3、机电传动系统的运动方程式是什么?其含义是什么?答:运动方程式为 T M T L =J(dω/dt) 。
其中,T M 是电动机产生的电磁转矩,T L 是负载转矩,J 是转动惯量,ω 是角速度,dω/dt 是角加速度。
该方程式表明了机电传动系统中电动机的电磁转矩与负载转矩之间的平衡关系,当 T M > T L 时,系统加速;当 T M < T L 时,系统减速;当 T M = T L 时,系统以恒定速度运行。
第二章机电传动系统的动力学基础1、为什么机电传动系统中一般需要考虑转动惯量的影响?答:转动惯量反映了物体转动时惯性的大小。
在机电传动系统中,由于电动机的转速变化会引起负载的惯性力和惯性转矩,转动惯量越大,系统的加速和减速过程就越困难,响应速度越慢。
因此,在设计和分析机电传动系统时,需要考虑转动惯量的影响,以确保系统的性能和稳定性。
2、多轴传动系统等效为单轴系统的原则是什么?答:多轴传动系统等效为单轴系统的原则是:系统传递的功率不变,等效前后系统的动能相等。
3、如何计算机电传动系统的动态转矩?答:动态转矩 T d = T M T L ,其中 T M 是电动机的电磁转矩,TL 是负载转矩。
步进电机控制方案1. 引言步进电机是一种常见的电动机,其特点是精准度高、扭矩稳定、可控性强等。
在许多应用中,需要对步进电机进行控制,以实现精准定位、旋转控制等功能。
本文将介绍步进电机的控制方案,并提供示例代码和运行结果。
2. 步进电机工作原理步进电机是一种定角度运动的电机,其工作原理基于磁场变化导致的转动。
步进电机由转子和定子组成,转子上有一系列的磁极,定子上有一组电枢。
通过依次通电给定子上的电枢,使得磁场依次在转子上形成,从而实现转子的连续旋转。
3. 步进电机控制方案步进电机的控制方案主要包括驱动器和控制器两部分。
驱动器用于控制步进电机的转动,控制器用于更精确地控制电机的运转。
3.1 驱动器选择常见的步进电机驱动器有两相、三相和四相驱动器。
根据实际应用需求,选择适合的驱动器可以提高电机的性能和效率。
以下是常见的驱动器选择情况:•两相驱动器:适用于低速应用,价格较低,但扭矩输出相对较低。
•三相驱动器:适用于高速和高扭矩应用,价格相对较高,但性能更好。
•四相驱动器:适用于中等速度和扭矩要求的应用。
3.2 控制器设计在步进电机控制中,控制器的设计是至关重要的。
控制器需要实现以下功能:•步进电机的速度控制:控制脉冲信号的频率和宽度,可以实现步进电机的高速或低速运动。
•步进电机的方向控制:控制脉冲信号的方向,可以实现步进电机的正转或反转。
•步进电机的位置控制:根据应用需求,设定目标位置和运动方式,通过控制脉冲信号的数量和频率,控制步进电机到达目标位置。
通常情况下,可以使用单片机或专用控制器来设计步进电机的控制器。
以下是一个简单的步进电机控制器的伪代码示例:def step_motor_control(target_position):current_position = 0while current_position != target_position:if target_position > current_position:# 正转move_forward()current_position += 1else:# 反转move_backward()current_position -= 1delay(1) # 控制电机运动速度4. 示例代码下面是一个使用Arduino控制步进电机的示例代码,该代码实现了步进电机的转动和控制:#include <Stepper.h>const int stepsPerRevolution = 200; // 步进电机每转的步数Stepper stepper(stepsPerRevolution, 8, 9, 10, 11); // 步进电机驱动器引脚void setup() {stepper.setSpeed(100); // 设置步进电机转速}void loop() {// 顺时针旋转一个圈stepper.step(stepsPerRevolution);delay(1000);// 逆时针旋转半个圈stepper.step(-stepsPerRevolution / 2);delay(1000);}5. 运行结果通过运行上述示例代码,可以实现步进电机的转动和控制。
步进电机控制方法步进电机是一种常见的电动执行器,广泛应用于各个领域的控制系统中。
它具有结构简单、控制方便、定位精度高等优点,是现代自动化控制系统中必不可少的重要组成部分。
本文将从基本原理、控制方法、应用案例等方面对步进电机进行详细介绍。
1. 基本原理步进电机是一种通过输入控制信号使电机转动一个固定角度的电机。
其基本原理是借助于电磁原理,通过交替激励电机的不同线圈,使电机以一个固定的步距旋转。
步进电机通常由定子和转子两部分组成,定子上布置有若干个线圈,而转子则包含若干个极对磁体。
2. 控制方法步进电机的控制方法主要包括开环控制和闭环控制两种。
开环控制是指根据既定的输入信号频率和相位来驱动电机,控制电机旋转到所需位置。
这种方法简单直接,但存在定位误差和系统响应不稳定的问题。
闭环控制则是在开环控制的基础上,增加了位置反馈系统,通过不断校正电机的实际位置来实现更精确的控制。
闭环控制方法相对复杂,但可以提高系统的定位精度和响应速度。
3. 控制算法控制步进电机的常用算法有两种,一种是全步进算法,另一种是半步进算法。
全步进算法是指将电流逐个向电机的不同线圈通入,使其按照固定的步长旋转。
而半步进算法则是将电流逐渐增加或减小,使电机能够以更小的步长进行旋转。
半步进算法相对全步进算法而言,可以实现更高的旋转精度和更平滑的运动。
4. 应用案例步进电机广泛应用于各个领域的控制系统中。
例如,在机械领域中,步进电机被用于驱动数控机床、3D打印机等设备,实现精确的定位和运动控制。
在医疗设备领域,步进电机被应用于手术机器人、影像设备等,为医疗操作提供准确定位和精确运动。
此外,步进电机还广泛应用于家用电器、汽车控制、航空航天等领域。
总结:步进电机作为一种常见的电动执行器,具有结构简单、控制方便、定位精度高等优点,在自动化控制系统中扮演着重要的角色。
通过本文的介绍,我们了解到步进电机的基本原理、控制方法、算法以及应用案例等方面的知识。
步进电机的控制方法步进电机(Stepper Motor)是一种将电信号转化为角位移的输出设备,通常用于需要精确控制角度和位置的应用领域,如3D打印机、CNC数控机床、机器人等。
步进电机的控制方法主要有三种:全步进控制、半步进控制和微步进控制。
下面将详细介绍这三种控制方法的原理和特点。
全步进控制是步进电机最简单和常用的控制方式之一。
它是通过改变电流的方向和大小来控制电机的转动。
步进电机内部有一个旋转磁场,当电流方向与旋转磁场方向一致时,电机会顺时针旋转;当电流方向与旋转磁场方向相反时,电机会逆时针旋转。
因此,通过改变电流的方向可以实现电机的正反转。
而改变电流的大小可以调节电机每一步转动的角度,从而控制精度。
例如,电流较小时电机每一步的转动角度较大,电流较大时电机每一步的转动角度较小,通过不同的电流设置可以实现不同的控制要求。
全步进控制简单可靠,适用于一些对控制精度要求相对较低的场合。
半步进控制是在全步进控制的基础上发展起来的一种控制方式。
它通过在两个相邻的全步进驱动脉冲之间改变电流的大小和方向来控制电机的转动。
在正向或逆向时,先施加一定大小的电流使电机进入半步状态,此时电机只旋转半个步距;然后再施加相反于旋转方向的电流使电机进入全步状态,此时电机旋转一个步距。
通过这种方式,半步进控制可以实现更高的分辨率和较大的控制精度。
但是,半步进控制的缺点是启动和停止过程中存在冲击、振动等不稳定现象,对控制系统的动态响应要求较高。
微步进控制是进一步提高步进电机控制分辨率和精度的一种控制方式。
它通过改变电流的大小和时间来实现对电机的微步控制。
微步进控制可以将电机每一步的移动量分割为更小的部分,从而实现更高的分辨率。
例如,微步进控制可以将电机每一步的移动量分割为10等分或更多等分,从而实现更精确的控制。
微步进控制的原理是通过调节电流大小和时间,使电机在磁力矩的作用下,从一个磁极到相邻磁极之间平滑地过渡,从而实现平稳的转动。
步进电机常用控制方式
步进电机常用的控制方式主要有以下几种:
1. 单步控制方式:基本的步进电机控制方式,通过控制电机的相序来控制电机的转动。
每次输入一个脉冲信号,电机就会转动一定的角度。
2. 微步控制方式:在单步控制的基础上发展而来,将每个步进电机的转动角度分成更小的步骤,从而实现更精细的控制。
通常情况下,微步控制方式可以将一个步进电机的转动角度分成200或400个微步。
3. 矢量控制方式:一种复杂的步进电机控制方式,通过控制电机的电流和电压来实现电机的转动,从而可以实现非常精细的转动控制。
4. 闭环控制方式:一种反馈控制方式,可以实时监测电机的转动状态,并根据监测结果来控制电机的转动。
这种方式可以大大提高电机的控制精度和稳定性。
5. 脉冲方向控制方式:一种简单的步进电机控制方式,通过控制电机的脉冲和方向信号来控制电机的转动。
这种方式通常用于一些简单的应用场景。
6. 全步进控制:最基本的控制方式,输入一个脉冲信号,步进电机的转子就转动一个基本角度步长,这可以实现高精度定位,但是转速受到限制,一般只能达到每秒几百步。
7. 半步进控制:输入一个脉冲信号,转子转动半个步长,这样每步脉冲实现更小的角度调整,转速可以提高一倍,达到每秒几千步,但精度也降低了一半。
请根据具体的使用环境和需求选择适合的控制方式。
如果需要更多关于步进电机控制的细节或更专业的解释,可以查阅相关文献或咨询专业人士。